一维模糊控制器的设计——水位变化
液位模糊控制系统的设计【毕业作品】
BI YE SHE JI(20 届)液位模糊控制系统的设计所在学院专业班级自动化学生姓名学号指导教师职称完成日期年月-II-摘要液位控制系统广泛存在于各个领域,是工业过程控制中的典型控制之一,液位控制早期运用PID控制方法实现。
常规的PID控制器具有无静态误差、高可靠行、算法简单等优点。
它的设计核心是整定参数,对于确定性的被控对象通过设定合适的PID控制器的三个参数,可以获得比较理想的控制效果。
但由于实际控制系统具有时变性、多变量、大滞后等特点,且在控制过程中会受到各种干扰因素的影响,要建立精确的数学模型很困难,也就不能达到预期效果。
近些年来,在很多控制过程中模糊控制都取得了成功,模糊控制器具有不依赖被控对象数学模型,适应性强的优点,在许多无法建立精确数学模型的复杂系统中表现出了其优越性,不仅获得了较好的控制效果,而且又能简化系统的设计。
因此,模糊控制在水箱液位控制系统中就成为较好的选择。
本文利用模糊控制理论设计一水箱水位模糊控制器,具体给出了系统设计方案。
首先详细的介绍了模糊控制的基本原理及模糊控制器的相关知识,其次讲述了对系统进行模糊控制的具体设计内容,在此基础上提出对水箱水位进行模糊控制的方案。
最后,充分利用MATLAB的模糊逻辑工具箱和Simulink相结合的功能得到实际液位跟踪给定液位的曲线,仿真结果证实水箱液位模糊控制系统能够获得良好的控制效果。
关键词:液位控制;模糊控制;MATLAB;SimulinkAbstract-II-Liquid level control system exists in each field extensively and is one of the typical control in industrial process control, the liquid level control most used PID control method in the early days. Conventional PID controller has lots of strong points, for instance, it has no static error, its algorithm is simple and it is reliable. The heart of its design is setting parameters; the certainty object can achieve satisfactory control effects through proper setting three parameters of PID. But the practical control systems have the characteristics of time-dependence, nonlinear, large lag and they will be influenced by various kinds of interference factors, so it is difficult to set up accurate mathematics model, then it is not possible to achieve the desired results.In the recent years, fuzzy control has achieved success in many control process. Fuzzy controller has outstanding merits that do not rely on mathematics model of object and whose adapting ability is strong, it shows its superiority in many complex systems which have no accurate mathematics model. It not only wins the better control results, but also can reduce system design. Therefore, control fuzzily become better choice on water tank level control system. This text designs a water tank level fuzzy control system according to the fuzzy control theory and puts forward a design scheme specifically. Firstly, it introduces the fuzzy control theory and the related knowledge of the fuzzy controller. Then, it describes the detailed design things for the system design, and proposes a fuzzy control scheme for the liquid level of the water tank on this basis. At last, the system has also fully utilized the function that the fuzzy logic toolbox of MATLAB combines with SIMULINK, and obtains the curve of the actual level tracking the desired level. Simulation results show that the water tank fuzzy control system can possess good control performance.Keywords: liquid level control; fuzzy control; MATLAB; Simulink-II--IV-目 录摘要..............................................................Ⅰ Abstract..........................................................Ⅱ 目录.. (Ⅲ)第一章 引言 (1)1.1 模糊控制的研究背景和现状 (1)1.1.1 研究背景 (1)1.1.2 研究现状 (1)1.2 课题来源及研究的意义 (2)1.3 本课题的研究内容及任务 (3)第二章 模糊控制系统 (4)2.1 模糊控制的原理 (4)2.2 模糊控制器的组成 (4)2.2.1 模糊化 (5)2.2.2 数据库 (7)2.2.3 规则库 (8)2.2.4 推理机 (8)2.2.5 反模糊化 (8)2.3 模糊控制器的结构 (9)第三章 模糊控制器及模糊控制系统设计 (11)3.1 常规模糊控制器设计 (11)3.2 模糊控制器的输出形式 (13)3.2.1 位置式输出 (13)3.2.2 增量式输出 (14)3.3 模糊控制器参数与系统控制性能 (15)3.3.1 模糊控制器输入、输出变量的论域 (15)3.3.2 模糊控制器输入比例因子e K 及c K 的影响 (16)第四章 液位模糊控制系统的设计及仿真 (19)4.1 确定控制方案 (19)4.2 液位模糊控制系统的设计 (19)4.2.1 确定模糊控制器的结构 (19)4.2.2 定义输入、输出模糊集及其论域 (19)4.2.3 定义隶属函数 (19)4.2.4 建立模糊控制表 (21)4.2.5 模糊推理 (22)4.2.6 反模糊化 (22)4.3 模糊控制系统仿真 (22)4.3.1 系统仿真模型的建立 (22)4.3.2 水箱液位模糊推理系统(FIS)的建立 (22)4.3.3 对Simulink模型控制系统的构建 (25)4.3.4 对系统进行Simulink模型仿真 (27)结论 (31)参考文献 (32)致谢 (33)-IV-第一章引言1.1模糊控制的研究背景和现状1.1.1 研究背景控制技术被广泛地应用在各种工业技术领域里,成为现代高新技术的重要手段之一。
模糊PID 控制水位系统

模糊PID 控制水位系统分析摘要: pid调节规律对建立精确数学模型控制系统是非常有效的。
但对于那些具有非线性、时变不确定性的控制对象,应用传统的pid调节器就难以实现有效的控制。
文中提出了利用模糊pid控制技术,对水位进行控制,以使plc对不同模型参数的系统均具有较好的控制性能,实现对系统动静态参数的最优控制。
abstract: pid regulating law is very effective for establishing a precise mathematical model control system. however, for those control objects with non-linearity, time-varying uncertainty, applying the traditional pid regulator would be difficult to achieve effective control. this paper proposed tocontrol the water level by using indistinct pid control technology, so that the plc has better control performance on the system of different model parameters, to achieve optimal control of static and dynamic parameters of the system.关键词: plc;模糊pid;模糊控制key words: plc;indistinct pid;indistinct control0 引言对于pid控制技术,其工作稳定、可靠性高、鲁棒性强,且易于接受。
但是,工业生产过程中经常遇到大时滞、强扰动、被控对象参数未知或是时变的系统,对这一类系统实施常规pid控制往往效果欠佳。
模糊-PID双模控制器在水位控制中的应用

图 2 模糊控制系统仿真结构图
- 105 -
第 29 卷第 5 期
唐山师范学院学报
2007 年 9 月
锅炉水位对象的传递函数采用下面的传递函数:
G (s)
H (s) V ( s ) s (T2 1)
其中 为水位反应速度, 即给水流量变化单位流量时水 位的变化速度,值为 0.033;T2 为时间常数,值为 11.5。 其仿真结果如图 3、图 4。 图 4 Fuzzy-PID 控制响应曲线 4 结论 由图 3、图 4 可以看出,本文设计的模糊- PID 双模 控制水位控制系统,过渡时间明显减少,超调量较传统
误差变化率 EC 的基本论域为[-3.85,+3.85],则 EC 的量化 因子 Kec=6/3.85=1.56;选取控制量 U 的基本论域为[-14.7,
if E=NB and EC=NB,then U=PB if E=NM and EC=NS,then U=PM
+14.7], 则 U 的量化因子 Ku=14.7/7=2.1, PID 控制器和模糊
e( k ) r ( k ) y ( k )
ec(k ) e(k ) e(k 1)
(1) (2)
公式(1)表示水位的偏差,其中 r (k ) 代表给定水位。 当水位 y (k ) 高于 r (k ) 时,即实际水位高于给定水位,偏差 为“负” ,水位高的越多,则偏差负的越大;相反, y (k ) 低
A/D
+ -
D/A
执行机构
被控对象
PID
传感器 图 1 模糊-PID 双控系统组成图 PID 控制是一种比较成熟的控制方法,所以本文控制器 的重点是模糊控制器的设计。 模糊控制器的设计由下面几个 步骤组成。 (1)确定模糊控制器的输入变量和输出变量 对于锅炉汽包水位的模糊控制系统, 可采用常见的二维 模糊控制器, 即它的输入变量是给定水位和实际水位的偏差 及偏差的变化:
基于模糊控制的清水池水位控制系统设计
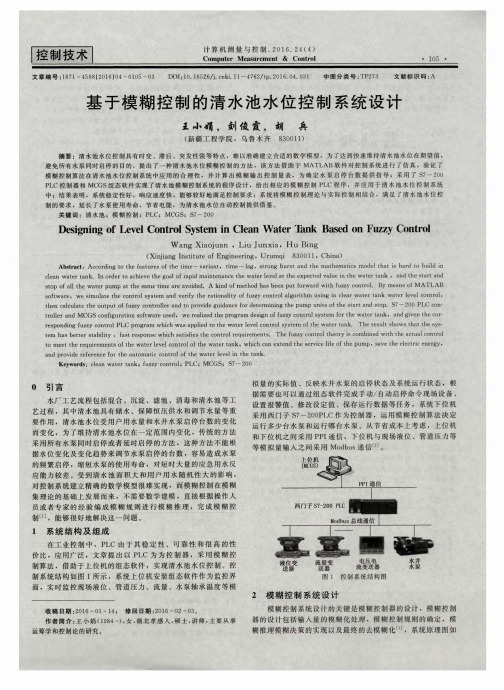
系 统 模 糊 推 理 采 用 ma md a n i 法 , 系统 模 糊 控 制 规 则 表 共
位 很 高 ,水 位 高 ,水 位 适 中 ,水 位 低 ,水 位很 低 ;选 择 偏 差 变
化率 E C 的模 糊 变 化 等 级 为 { 一2 ,一1 ,0 ,1 ,2 } ,模 糊 语 言 值为 { NB ( 负大) ,NS ( 负小 ) ,0 ( 零) ,PS ( 正 小) ,P B
NB NS o PS PB NB NB NS NS o NB NS NS NS o NS NS o PS PS o PS PS PB PB PS PS PS PB PB
定水位偏 差的变化率 为 [ 一0 . 0 2 m/ mi n ,0 . 0 2 m/ mi n i 。 系 统 有 4台 水 井 水 泵 ,输 出为 运 行 水 泵 的 台数 ,确 定 输 出 “的 基 本 论域为 [ O ,3 ][ 。
( 2 )水位偏差变化率 e c 为 负 ,表 明 清水 池 水 位 偏 差 增 大 ; 水位偏差变化率 e c 为 正 ,表 明 清 水 池 水 位 偏 差 减 小 。
定 范 围 内变 化 。
根 据 操 作 人 员 的 工 作 经 验 ,当 水 位 偏 差 E 为 负 大 ,水 位 偏差变化率 E C 为负 大 时 ,表 明水 位 很 高 且 水 位 上 升 很 快 ,需
( 正大 ) } ,分 别 表 示 清 水 池 水 位 偏 差 增 大 很 快 ,偏 差 增 大 快 , 偏 差 适 中 ,偏 差 减 小 快 ,偏 差 减 小 很 快 ;选 取 输 出 量 U 的模
糊变化等 级 为 { 一2 ,一 1 ,0 ,i ,2 ) ,模 糊 语 言 值 为 { NB ( 负大) ,NS ( 负小) ,0 ( 零) ,PS ( 正小) ,P B ( 正大) ) , 则 分 别 表 示 水 井水 泵 运 行 0台 ,运 行 1台 ,运 行 2台 ,运 行 3 台 ,运 行 4台l 4 ] 。根 据 经 验 ,结 合 控 制 简 单 的 原 则 ,选 取 Z形 隶 属 函数 、三 角形 隶 属 函 数 、s形 隶 属 函 数 三 者 结 合 的隶 属 函 数 作 为 E、E C、U 的 隶 属 函 数 ,其 中 NB ( 负 大 ) 选 用 Z形 隶 属 函数 ;NS ( 负小 ) ,0 ( 零) ,PS ( 正 小 ) 选 用 三 角 形 隶 属 函数 ;PB ( 正 大 ) 选 用 s形 隶 属 函 数 。偏 差 E 的 隶 属 的 函 数 图如 图 3 所 示 ,EC和 U 的 隶 属 函数 与 E 相 同 。
基于模糊控制算法的地下水位动态预报系统设计

系统 ,并 且 要 经 过 大 量 复 杂 的计 算 。基 于此 ,把
地下水系统视 为一个模糊系统。然而 ,考虑到地
下水 系统 的变 化 过程 ,主 要 是 由于 系统 的补 给 量 与 开采量 在 数量 上 的差 异 直 接放 映在 地 下 水 位 的
变化 上 。 目前对 于这 3种量 的变化 资料容 易 获得 。
( )若 ( 2 3或 A )且 B ,则 C ; 4 A ,A 4 2 2
参照补给量的模糊等级划分规则但是每个输出量 和输入量的基本论域和模糊集论域是不尽相同的。 开采量分为 5 个模糊等级 ,依次记为 B 很少 ) 1(
B ( 少 )B ( 中 ) B ( 多 ) B ( 多 ) 2 偏 3 适 4 偏 5 很 , 水位 变 幅 分 为 5个 模 糊 等 级 ,依 次 记 为 c 很 l( 少 )C ( 少 )C ( 中 )c ( 多 ) C ( 2 偏 3 适 4 偏 5 很 多) ,相应 的隶属度 函数 见图 3 图 4 和 。
图 1 常规模 糊 控制 器结 构
()模糊化接 口,模糊控制器 的输入必须通 1
过模糊化才能用于模糊控制输 出的求解 ,它是模
糊控 制器 的输 入 接 口 ,其 主要 作用 是 将 真实 确 定
的输 入量 转换 成一个 模 糊矢 量 。
我们将地下水系统的预报过程模拟成一模糊 控制
过 程 。把 补 给量 、开 采 量 做 为输 入 ,水位 变化 作 为预 报量 ,输 入 输 出 间 的模 糊 关 系 视 为 模糊 变换
模糊控制在液位控制中的仿真应用设计
吉林化工学院毕业设计模糊控制在液位控制中的仿真应用设计Simulation Design Based on Fuzzy Controller in Liquid LevelControl学生学号:09510441学生姓名:霍可栋专业班级:自动0904指导教师:吕春兰职称:副教授起止日期:2013.03.04~2013.06.23吉林化工学院Jilin Institute of Chemical Technology摘要本次设计主要论述了应用模糊控制理论控制水箱液位,详尽的介绍模糊控制理论的相关知识,提出水箱液位模糊控制的方案,建立基于水箱水位的数学模型并用MATLAB进行仿真设计。
首先根据双容水箱的系统结构,通过计算得到数学模型的传递函数;然后利用Matlab 工具箱设计模糊控制器,具体包括以下三步:(1)确定模糊控制器的结构;(2)输入输出的模糊化;(3)模糊推理决策算法设计;最后分别用常规PID控制与模糊控制对双容水箱系统仿真。
通过常规PID控制与模糊控制仿真结果的对比,我们能看出模糊控制较传统的PID控制来讲具有响应速度快、适应性较强,即鲁棒性好、超调量小稳定时间较长等优点,显示出很强的抗干扰性能。
关键词:水位控制;模糊控制器;模糊规则; FISAbstractThis paper is primarily on the applied fuzzy control theory control level in the reservoir system, first introduced in detail the fuzzy control theory of knowledge, and Then put forward to realize the control of the water level in the water tank scheme using fuzzy theory,finally simulation design of mathematical model of fuzzy controller with MATLAB based on the water tank water level .Firstly, according to the system structure of double tank, transfer function is obtained through the calculation of mathematical model. Then use the Matlab toolbox to design the fuzzy controller, including the following three steps: (1)Determine the structure of fuzzy controller;(2)Fuzzy input and output; (3)Design of fuzzy reasoning and decision algorithms. Finally, by using the MATLAB fuzzy logic toolbox and SIMULINK combination function,Compare the simulation result of conventional PID control and fuzzy control for dual-tank system.By contrast to conventional PID control and fuzzy control simulation results, we can see the fuzzy control over the conventional PID control with fast response, strong adaptability, robustness, and overshoot advantages of a small stable for a long time, showing the expected good steady performance.Key Words:Level control; Fuzzy controller; Fuzzy rules; FIS目录摘要 (I)Abstract (II)第一章绪论 (1)1.1 模糊控制水箱水位系统概述 (1)1.2 模糊控制理论简介 (1)1.2.1 模糊控制理论的产生、发展及现状 (1)1.2.2 模糊控制理论运用于水箱水位系统控制的意义 (2)1.3 仿真建模工具软件MATLAB/SIMULINK简介 (2)1.4 本文的主要任务及内容安排 (4)第二章模糊理论及模糊控制基础 (6)2.1模糊理论基础 (6)2.1.1 从经典集合到模糊集合的转变 (6)2.1.2 模糊集合的基本概念 (8)2.1.3 模糊集合的基本运算 (11)2.2 模糊控制的基础知识 (13)2.2.1 模糊控制的一般概念 (14)2.2.2 模糊控制的回顾和展望 (15)2.2.3 模糊控制系统的结构 (15)2.3 本章小结 (20)第三章水箱水位模糊控制器的建立 (22)3.1 双容水箱的动态分析与建模 (22)3.2Matlab下模糊控制器的设计 (24)3.2.1 确定模糊控制器的结构 (24)3.2.2 输入输出的模糊化 (25)3.2.3 模糊推理决策算法设计 (26)3.3 本章小结 (29)第四章利用MATLAB对水箱水位系统进行仿真建模 (30)4.1 水箱水位模糊推理系统(FIS)的建立 (30)4.2 模糊规则的建立 (32)4.3 对SIMULINK模型控制系统的构建 (35)4.4Matlab对水箱液位的仿真设计 (36)4.4.1 常规PID对液位模型的仿真 (36)4.4.2 模糊控制对液位模型的仿真 (37)4.4.3 混合式模糊控制对液位的仿真 (38)4.4.4 干扰后常规PID与模糊控制仿真对比 (39)4.5 本章小结 (40)结论 (42)参考文献 (43)致谢 (44)第一章绪论1.1 模糊控制水箱水位系统概述在能源、化工等多个领域中普遍存在着各类液位控制系统,各种控制方式在液位控制系统中也层出不穷,如较常用的浮子式、磁电式和接近开关式。
模糊控制案例001
• 模糊控制的特点
所谓的模糊控制,既不是指被控制的对
象是模糊的,也不是模糊控制器是不确 定的,模糊控制有着自己的一套精确的 理论和算法。所谓的模糊是指在表示知 识,概念上的模糊性。虽然模糊控制器 的算法是通过模糊语言描述的,但它所 完成的是一项完全确定性的工作。
图(c)开启电压u的语言值的隶属函数
表3 开启电压u的语言值的隶属度表格
隶属 度
元 素 -3
-2
-1
0
1
2
3
语言值
PB(C1) 0
0
0
0
0.3 0.7 1
PM(C2) 0
0
0
0.3 0.7 1
0.7
PS(C3) 0
0
0.3 0.7 1
0.7 0.3
Z(C4)
0
0.3 0.7 1
0.7 0.3 0
NS(C5) 0.3
n K e xe
3 30
0.1
去模糊化的结果不能直接作用被控对象,还需要将
其转换到被控对象能接受的基本论域中。
输出变量的基本论域为[-yu, yu] 输出变量的模糊论域为{-l, -l+1, …, 0, …, l-1, l}
Ku
yu l
电气与自动化学院 自动化系
11
② 系统液位误差前后两次采样值变化量 是ec=e2-e1=(h2-hd)-(h1-hd)=h2-h1, 取其语言变量为EC,
3. 确定语言值隶属度函数。对上面各语 言值给定其模糊化的隶属度函数,这 里为简单起见选择三角形函数。
A7 A6 A5 A4 A3 A2 A1 NB NM NS Z PS PM PB
0.1
e
-3 -2 -1 0 1 2 3 (a)
模糊控制算法实例解析(含代码)
模糊控制算法实例解析(含代码)
首先来看一个实例,控制进水阀S1和出水阀S2,使水箱水位保持在目标水位O处。
按照日常操作经验,有以下规则:
1、若当前水位高于目标水位,则向外排水,差值越大,排水越快;
2、若当前水位低于目标水位,则向内注水,差值越大,注水越快;
3、若当前水位和目标水位相差很小,则保持排水速度和注水速度相等。
下面来设计一个模糊控制器
1、选择观测量和控制量
一般选择偏差e,即目标水位和当前水位的差值作为观察量,选取阀门开度u为控制量。
2、输入量和输出量的模糊化
将偏差e划分为5个模糊集,负大(NB)、负小(NS)、零(ZO)、正小(PS)、正大(PB),e为负表示当前水位低于目标水位,e 为正表示当前水位高于目标水位。
设定e的取值范围为[-3,3],隶属度函数如下。
偏差e对应的模糊表如下:隶属度
变化等级-3 -2
-1
1
2
3模糊集
PB 0 0 0 0 0 0.5
1PS 0
0 0.5 1 0.5 0ZO
0 0.5 1 0.5 0
0NS
0 0.5 1 0.5 0
0NB
0.5 0 0 0 0 0。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
其中规则内的模糊集运算取交集,规则间的 模糊集运算取并集。
1 0 .5 0 NB e NB u 0 1 0 0 0
0 .5
0
0
0
0
0
0
1 . 0 0 .5 0 0 0 0 0 0
0 .5 0 .5 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 .5 1 NS e NS u 0 0 0 0 0
表4-3 模糊控制规则表
若 ( IF) 则 ( THEN) N Be N Bu N se N su Oe Ou P Se P Su PBe PBu
4 求模糊关系 模糊控制规则是一个多条语句,它可以表 示为U×V上的模糊子集,即模糊关系R:
R (NB e NB u ) (NS e NS u ) (O e O u ) (PS e PS u ) (PB e PB u )
1 . 0 0 .5 0 R 0 0 0 0 0 .5 0 .5 0 .5 0 0 0 0 0 0 .5 1 .0 0 0 0 0 0 0 .5 0 .5 0 .5 0 .5 0 0 0 0 0 .5 1 .0 0 .5 0 0 0 0 0 .5 0 .5 0 .5 0 .5 0 0 0 0 0 1 .0 0 .5 0 0 0 0 0 0 .5 0 .5 0 .5 0 0 0 0 0 0 .5 1 .0
0 0 0 0 0 0 .5 1 .0
1 0 . 5
0 .5
0 .5
0
0
0
6 控制量的反模糊化 由模糊决策可知,当误差为负大时,实际 液位远高于理想液位,e=NB,控制器的输出 为一模糊向量,可表示为:
u 1 4 0 .5 3 0 .5 2 0 .5 1 0 0 0 1 0 2 0 3 0 4
根据偏差e的变化范围分为七个等级:-3,-2, -1,0,+1,&表
变 化 等 级 隶 属 度 -3 PB PS 模 O 糊 集 NS NB 0 1 0 .5 0 .5 1 0 0 0 0 0 0 0 0 0 0 0 0 .5 1 0 .5 0 0 0 0 -2 0 0 -1 0 0 0 0 0 1 0 1 2 0 .5 0 .5 3 1 0
h
图 4-4 水箱液位控制
1 确定观测量和控制量 定义理想液位O点的水位为h0,实际测得的 水位高度为h,选择液位差
e h h0 h
将当前水位对于O点的偏差e作为观测量,
2 输入量和输出量的模糊化 将偏差e分为五级:负大(NB),负小(NS ),零(O),正小(PS),正大(PB)。
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 .5 0 .5 0 .5 0 0 0
0 0 .5 1 .0 0 .5 0 0 0
0 0 .5 0 .5 0 .5 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 PS e PS u 0 0 1 . 0 0 .5 0
如果按照“隶属度最大原则”进行反模糊 化,则选择控制量为 4 ,即阀门的开度应 u 关大一些,减少进水量。
仿真:按上述步骤,设计水箱模糊控制的 Matlab仿真程序。通过该程序,可实现模糊控 制的动态仿真。模糊控制响应表见表4-4所示 。取偏差e=-3,运行该程序,得u =-3.1481。
表4-4 模糊控制响应表
3 模糊规则的描述 根据日常的经验,设计以下模糊规则: (1)“若e负大,则u正大” (2)“若e负小,则u正小” (3)“若e为0,则u为0” (4)“若e正小,则u负小” (5)“若e正大,则u负大”
上述规则采用“IF A THEN B”形式来描述 : (1) if e=NB then u=NB (2) if e=NS then u=NS (3) if e=0 then u=0 (4) if e=PS then u=PS (5) if e=PB then u=PB 根据上述经验规则,可得模糊控制表4-3。
0 .5 0 .5 0 .5 0 0 0 0
0 0 .5 1 .0 0 0 0 0
0 0 .5 0 .5 0 .5 0 .5 0 0
0 0 0 .5 1 .0 0 .5 0 0
0 0 0 .5 0 .5 0 .5 0 .5 0
0 0 0 0 1 .0 0 .5 0
0 0 0 0 0 .5 0 .5 0 .5
0 0 0 0 0 0 0
0 0 0 PB e PB u 0 0 0 0 .5 1 . 0
0
0
0
0
0
0
0 .5
0 0 0 1 .0 0 0 0 0
0
0
0
0
0 .5
1 .0
0 .5
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 .5 0 .5 0
0 0 0 0 1 .0 0 .5 0
0 0 0 0 0 .5 0 .5 0
0 .5
1
0 .5
0
0
0
0
0 0 0 0 0 0 0 0
0 0 .5 0 .5 0 0 0 0
0 0 .5 1 .0 0 0 0 0
0 0 .5 0 .5 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 .5 0 .5
0 0 0 0 0 0 .5 1 .0
由以上五个模糊矩阵求并集(即隶属函数最大 值),得:
5 模糊决策 模糊控制器的输出为误差向量和模糊关系 的合成:
u eR
当误差e为NB时, e 1 . 0 控制器输出为
0 .5
0
0
0
0
0
u e R 1 0 . 5
0
0
0
0
1 . 0 0 .5 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 .5 O e Ou 1 . 0 0 0 .5 0 0
0
0
0 .5
1
0 .5
0
0
0 0 0 0 0 0 0 0
e u -3 -3 -2 -2 -1 -1 0 0 1 1 2 2 3 3
控制量u为调节阀门开度的变化。将其分为 五级:负大(NB),负小(NS),零(O) ,正小(PS),正大(PB)。并根据u的变 化范围分为九个等级:-4,-3,-2,-1,0,+1 ,+2,+3,+4。得到控制量模糊划分表4-2。
表4-2 控制量变化划分表
变 化 等 级 隶 属 度 -4 PB PS 模 O 糊 集 NS NB 0 1 0.5 0.5 1 0 0.5 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0.5 1 0.5 0 0 0 0 0 -3 0 0 -2 0 0 -1 0 0 0 0 0 1 0 0.5 2 0 1 3 0.5 0.5 4 1 0
4.1.3、模糊控制系统的工作原理
以水位的模糊控制为例,如图4-4所示。设有一个 水箱,通过调节阀可向内注水和向外抽水。设计一个模 糊控制器,通过调节阀门将水位稳定在固定点附近。按 照日常的操作经验,可以得到基本的控制规则:
“若水位高于O点,则向外排水,差值越大,排水越快
”; “若水位低于O点,则向内注水,差值越大,注水越快 ”。 根据上述经验,按下列步骤设计模糊控制器: