基于STM32的直流电机PID调速系统设计
基于STM32的直流电机PID调速系统设计
《计算机控制技术课程设计》题目:基于STM32的直流电机PID调速学院:计算机与电子信息学院专业:电气工程及其自动化班级:电气12-5 学号: 12034320515 姓名:任课教师:完成时间: 2015.11.18——2015.12.30基于STM32的直流电机PID调速摘要电机转速控制在运动控制系统中占有至关重要的地位,本设计将电机转速控制作为研究对象;以PID为基本控制算法,STM32F103单片机为控制核心,产生受PID算法控制的PWM脉冲实现对直流电机转速的控制。
同时利用光电传感器将电机速度转换成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。
在系统中采320×240TFTLCD显示器作为显示部件,通过4个按键通过界面切换方式设置P、I、D、V四个参数和正反转控制,启动后可以通过显示部件了解电机当前的运行状态和系统的CPU温度。
该系统控制精度高,具有很强的抗干扰能力。
关键词:PID 直流电机反馈调节Based on the STM32 PID speed control of dc motorAbstractMotor speed control occupies a crucial position in the motion control system, the design of the motor speed control for the study; in the basic PID control algorithm, STM32F103 microcontroller core, by the PID control algorithm generates a PWM pulse to achieve DC speed control. At the same time the use of photoelectric sensors to convert the motor speed to pulse frequency feedback to the microcontroller to achieve closed-loop speed control, to speed static error adjustment purposes. Mining 320 ×240TFTLCD monitor as a display unit in the system, through four key settings P, I, D, V four parameters and reversing control through the interface switching mode, start to understand the current state of the motor and the system through the display unit CPU temperature. The system control and high precision, has a strong anti-jamming capability.Keywords: PID DC motor feedback regulation目录1. 绪论 (1)1.1研究背景与意义 (1)1.2本文主要研究方法 (1)2. 设计方案与论证 (2)2.1系统设计方案 (2)2.2控制器模块设计方案 (2)3. 系统硬件电路设计 (3)3.1整体电路设计 (3)3.1.1整体理论 (3)3.1.2整体简单结构图和资源分配图 (3)3.2最小单片机系统设计 (4)3.2.1STM32F103复位电路 (6)3.2.2电源电路 (6)3.3电机驱动电路设计 (7)3.4光电码盘编码器电路设计 (7)3.5显示电路设计 (8)3.6按键电路设计 (10)4. 系统软件设计 (10)4.1PID算法 (10)4.2PID参数整定方法 (11)4.3电机速度采集算法 (12)4.4程序流程图 (12)5. 系统调试 (13)5.1软件调试 (13)5.2系统测试与分析 (14)6. 总结与展望 (15)参考文献 (16)附录一部分程序源程序 (17)附录二系统界面实物图和PCB图 (20)1.绪论1.1研究背景与意义电动机在现代的工业中,是主要的驱动设备,尤其是直流电动机,由于它的平滑调速性和结构上的简单,使其成为许多电器,如洗衣机,电梯等的驱动。
基于STM32的直流电机PID调速系统设计概要
《电气控制技术》研究生课程设计报告题目基于STM32的直流电机PID调速系统学院机械与汽车工程学院专业班级车辆工程学号************学生姓名李跃轩指导教师康敏完成日期2017年01月03日《智能控制基础》研究生课程设计报告目录1.绪论 (1)2.设计方案 (1)3.系统硬件电路设计 (2)3.1整体电路设计 (2)3.2最小单片机系统设计 (3)3.2.1STM32F103复位电路 (3)3.2.2电源电路 (4)3.3电机驱动电路设计 (5)3.4光电码盘编码器电路设计 (6)3.5 显示电路设计 (6)3.6按键电路设计 (7)4.系统软件设计 (7)4.1 PID算法 (7)4.2电机速度采集算法 (8)5.系统调试 (9)5.1 软件调试 (9)5.2 系统测试与分析 (9)6.总结与展望 (10)附录一 (11)附录二 (16)1.绪论本文主要研究了利用STM32系列单片机,通过PWM方式控制直流电机调速的方法。
PWM控制技术以其控制简单、灵活和动态响应好的优点而成为电力电子技术最广泛应用的控制方式,也是人们研究的热点。
由于当今科学技术的发展已经没有了学科之间的界限,结合现代控制理论思想或实现无谐振软开关技术将会成为PWM控制技术发展的主要方向之一。
本文就是利用这种控制方式来改变电压的占空比实现直流电机速度的控制。
采用的芯片组成了PWM信号的发生系,然后通过L298N放大来驱动电机。
利用光电编码盘器测得电机速度,然后反馈给单片机,在内部进行PID运算,输出控制量完成闭环控制,实现电机的调速控制。
2.设计方案根据系统设计的任务和要求,设计系统方框图如图1所示。
图中控制器模块为系统的核心部件,键盘和显示器用来实现人机交互功能,其中通过键盘将速度参数输入到单片机中,并且通过控制器显示到显示器上。
在运行过程中控制器产生PWM脉冲送到电机驱动电路中,经过放大后控制直流电机转速,同时利用速度检测模块将当前转速反馈到控制器中,控制器经过数字PID运算后改变PWM脉冲的占空比,实现电机转速实时控制的目的。
基于stm32的直流无刷电动机调速系统设计_开题报告
毕业设计开题报告
题目:基于STM32的直流无刷电动机
调速系统设计
学院:
学生:
学号:
指导教师:
完成时间:
四、所需条件及落实措施:
1.理论基础:
常用无刷直流电机的逆变器采用三相桥式主回电路的控制方式一般有2 种:二二
导通模式和三三导通模式,根据图2换相时序图可知,这两种工作方式,一个周期
都存在6 种导通状态,以60°电角度为间隔改变。
由于两种导通模式相比较,二二导通较三三导通方式电磁转矩更大,稳定性更好,而且结合本文的反电动势检测法,使控制更为简单。
所以本系统设计采用的是传统的二二导通模式,即任意时刻都有而且只有2 只开关管导通。
可以推出功率管的导通顺序依次是:T6、T1-> T1、T2-> T2、T3-> T3 、T4 ->T4、T5-> T5、T6。
每个功率管导通120°电角度,之间间隔60°电角度,并处于关断状态,可以很好的避免死区的产生而发生主回路直通短路,此种工作方式称为两相导通星型三相6 状态方式。
由此可见逆变器功率管的换相时刻精准确定就成为了调速控制的重中之重。
图2 直流无刷电动机的工作原理
2.设备和器材:
示波器、万用表、电烙铁、焊锡丝、螺丝刀、直流无刷电动机、导线若干、电子元。
基于STM32单片机的直流电机调速系统设计
P1
VCC5 1
Right_A 2
Right_B 3
4
右光电码盘
图 4 测速模块的电路设计
3 系统软件设计
当把直流电机闭环控制所需的程序编译没有错误,利用keil4 编译环境把程序通过J-LINK下载到STM32单片机。闭合直流电机 闭环控制模块的电源开关,电机开始转动,STM32单片机隔50ms采 集电机转速, 增量式P I D 运算, 调剂P W M 波的占空比。不断地调试 PID参数,可以使电机的转速达到给定值。系统的主程序是一个循 环程序,其流程图如图5所示。
参考文献
[1]刘长青,李迎光,等.基于特征的飞机结构件数控加工工时预测模 型[J].计算机集成制造系统,2011,17(10):2156-2162. [2]王殿龙,陈劲枰,等.基于 BP 神经网络的切削力预报[J].大连理工 大学学报,2005,45(06):814-818. [3]FatihCamci,R.B.C.Health-State Estimation and Prognostics in Machining Processes.IEEE Transactions on Automation Science and Engineering,2010,7(3):581-597.
MC33886
IN22 VCC5
OUT22
+ C16 33nF
OUT21
- A +
B2 Motor Servo
OUT22
P?
VCC5 Right_A Right_B
1 2 3
4
右光电码盘
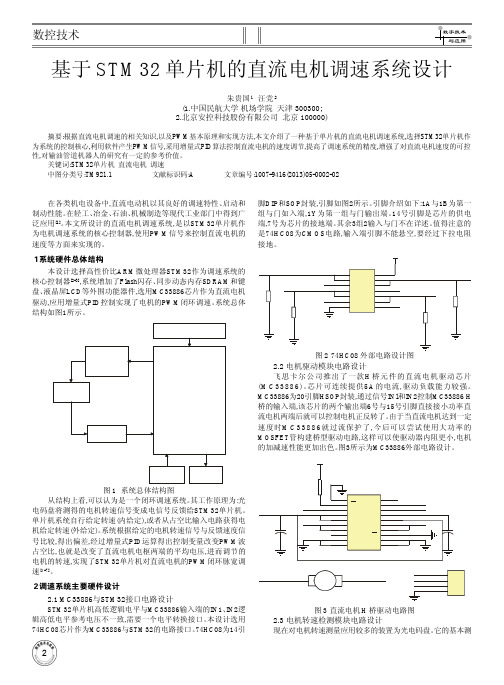
图 3 直流电机 H 桥驱动电路图 2.3 电机转速检测模块电路设计
现在对电机转速测量应用较多的装置为光电码盘。它的基本测
STM32实现电机的PID控制

PID控制应该算是非常古老而且应用非常广泛的控制算法了,小到热水壶温度控制,大到控制无人机的飞行姿态和飞行速度等等。
在电机控制中,PID算法用得尤为常见。
一、位置式PID1.计算公式在电机控制中,我们给电机输出的是一个PWM占空比的数值。
话不多说,直接上位置式PID基本公式:控制流程图如下:上图中的目标位置一般我们可以通过按键或者开关等方式编程实现改变目标值,测量位置就是通过stm32 去采集编码器的数据。
目标位置和测量位置之间作差就是目前系统的偏差。
送入PID 控制器进行计算输出,然后再经过电机驱动的功率放大控制电机的转动去减小偏差,最终达到目标位置的过程。
2.C语言实现如何把我们以上的理论分析和控制原理图使用C 语言写出来呢,这是一个有趣且实用的过程。
位置式PID 具体通过C 语言实现的代码如下:int Position_PID (int Encoder,int Target){static float Bias,Pwm,Integral_bias,Last_Bias;Bias=Target- Encoder; //计算偏差Integral_bias+=Bias; //求出偏差的积分//PID基本公式Pwm=Position_KP*Bias+Position_KI*Integral_bias+Position_KD*(Bias-Last_Bias);Last_Bias=Bias; //保存上一次偏差return Pwm; //输出}入口参数为编码器的位置测量值和位置控制的目标值,返回值为电机控制PWM(现在再看一下上面的控制框图是不是更加容易明白了)。
第一行是相关内部变量的定义。
第二行是求出位置偏差,由测量值减去目标值。
第三行通过累加求出偏差的积分。
第四行使用位置式PID 控制器求出电机PWM。
第五行保存上一次偏差,便于下次调用。
最后一行是返回。
二、增量式PID1.计算公式速度闭环控制就是根据单位时间获取的脉冲数(这里使用了M 法测速)测量电机的速度信息,并与目标值进行比较,得到控制偏差,然后通过对偏差的比例、积分、微分进行控制,使偏差趋向于零的过程。
基于STM32的直流电机PID调速系统设计
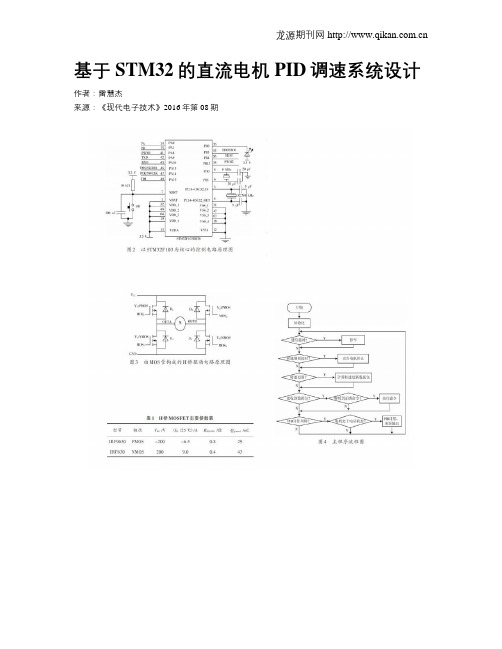
基于STM32的直流电机PID调速系统设计作者:***来源:《现代电子技术》2016年第08期摘要:设计一种基于单片机的直流电机调速系统,该系统以基于ARM Cortex⁃M3内核的STM32微控制器为核心,利用软件产生PWM控制信号,采用增量式PID算法控制直流电机的起动、制动、正反转和速度调节,简单友好的上位机界面可实时监测电机的各种运行信息。
实验结果表明,该系统具有稳态误差小,控制精度高,响应速度快,能耗低、效率高等优点,对上肢康复机器人的研究具有一定的借鉴价值。
关键词: STM32;直流电机; PID;调速系统中图分类号: TN710⁃34; TM921; TP29 文献标识码: A 文章编号: 1004⁃373X (2016)08⁃0165⁃03Design of STM32⁃based PID speed control system for DC motorsLEI Huijie(College of Electronic Information and Electrical Engineering, Anyang Institute of Technology, Anyang 455000, China)Abstract: The DC motor speed control system based on MCU was designed. The system takes the microcontroller STM32 based on ARM Cortex⁃M3 as its core. Its PWM control signal is generated with software. The incremental PID algorithm is adopted to control starting, braking,positive inversion and speed regulation of DC motors. The running information of the motors can be monitored in real time on the simple and friendly interface of the upper computer. Practical result shows that the system has small steady state error, high control precision, fast response, low energy consumption and high efficiency, and has a certain reference for the research of upper limb rehabilitation robot.Keywords: STM32; DC motor; PID; speed control system直流调速系统广泛应用于低转速、高精度等各领域,如精密办公设备(喷墨打印机、激光打印机),自动售货机,家用电器、机器人和玩具设备等。
基于STM32的直流电机PID调速系统设计
基于STM32的直流电机PID调速系统设计一、引言直流电机调速系统是现代工业自动化系统中最常用的电机调速方式之一、它具有调速范围广、响应快、控制精度高等优点,被广泛应用于电力、机械、石化、轻工等领域。
本文将介绍基于STM32单片机的直流电机PID调速系统的设计。
二、系统设计直流电机PID调速系统主要由STM32单片机、直流电机、编码器、输入和输出接口电路等组成。
系统的设计流程如下:1.采集反馈信号设计中应通过编码器等方式采集到反馈信号,反应电机的转速。
采集到的脉冲信号经过处理后输入给STM32单片机。
2.设计PID算法PID调节器是一种经典的控制算法,由比例(P)、积分(I)和微分(D)三个部分组成,可以根据实际情况调整各个参数的大小。
PID算法的目标是根据反馈信号使电机达到期望的转速。
3.控制电机速度根据PID算法计算出的偏差值,通过调节电机的占空比,实现对电机速度的控制。
当偏差较大时,增大占空比以加速电机;当偏差较小时,减小占空比以减速电机。
4.界面设计与控制设计一个人机交互界面,通过该界面可以设置电机的期望转速以及其他参数。
通过输入接口电路将相应的信号输入给STM32单片机,实现对电机的远程控制。
5.系统保护在电机工作过程中,需要保护电机,防止出现过流、超速等问题。
设计一个保护系统,能够监测电机的工作状态,在出现异常情况时及时停止电机工作,避免损坏。
6.调试与优化对系统进行调试,通过实验和测试优化PID参数,以获得更好的控制效果。
三、系统实现系统实现时,首先需要进行硬件设计,包括STM32单片机的选型与外围电路设计,以及输入输出接口电路的设计。
根据实际情况选择合适的编码器和直流电机。
接着,编写相应的软件代码。
根据系统设计流程中所述,编写STM32单片机的控制程序,包括采集反馈信号、PID算法实现、控制电机速度等。
最后,进行系统调试与优化。
根据系统的实际情况,调试PID参数,通过实验和测试验证系统的性能,并进行优化,以实现较好的控制效果。
基于STM32的直流电机PID调速系统设计
《计算机控制技术课程设计》题目:基于STM32的直流电机PID调速学院:计算机与电子信息学院专业:电气工程及其自动化班级:电气12-5 学号:姓名:任课教师:完成时间:——基于STM32的直流电机PID调速摘要电机转速控制在运动控制系统中占有至关重要的地位,本设计将电机转速控制作为研究对象;以PID为基本控制算法,STM32F103单片机为控制核心,产生受PID算法控制的PWM脉冲实现对直流电机转速的控制。
同时利用光电传感器将电机速度转换成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。
在系统中采320×240TFTLCD显示器作为显示部件,通过4个按键通过界面切换方式设置P、I、D、V四个参数和正反转控制,启动后可以通过显示部件了解电机当前的运行状态和系统的CPU温度。
该系统控制精度高,具有很强的抗干扰能力。
关键词:PID 直流电机反馈调节Based on the STM32 PID speed control of dc motorAbstractMotor speed control occupies a crucial position in the motion control system, the design of the motor speed control for the study; in the basic PID control algorithm, STM32F103 microcontroller core, by the PID control algorithm generates a PWM pulse to achieve DC speed control. At the same time the use of photoelectric sensors to convert the motor speed to pulse frequency feedback to the microcontroller to achieve closed-loop speed control, to speed static error adjustment purposes. Mining 320 × 240TFTLCD monitor as a display unit in the system, through four key settings P, I, D, V four parameters and reversing control through the interface switching mode, start to understand the current state of the motor and the system through the display unit CPU temperature. The system control and high precision, has a strong anti-jamming capability.Keywords: PID DC motor feedback regulation目录1. 绪论 (1)研究背景与意义 (1)本文主要研究方法 (1)2. 设计方案与论证 (2)系统设计方案 (2)控制器模块设计方案 (2)3. 系统硬件电路设计 (3)整体电路设计 (3)整体理论 (3)整体简单结构图和资源分配图 (3)最小单片机系统设计 (4)STM32F103复位电路 (6)电源电路 (6)电机驱动电路设计 (7)光电码盘编码器电路设计 (7)显示电路设计 (8)按键电路设计 (10)4. 系统软件设计 (10)PID算法 (10)PID参数整定方法 (11)电机速度采集算法 (12)程序流程图 (12)5. 系统调试 (13)软件调试 (13)系统测试与分析 (14)6. 总结与展望 (15)参考文献 (16)附录一部分程序源程序 (17)附录二系统界面实物图和PCB图 (20)1.绪论1.1研究背景与意义电动机在现代的工业中,是主要的驱动设备,尤其是直流电动机,由于它的平滑调速性和结构上的简单,使其成为许多电器,如洗衣机,电梯等的驱动。
基于STM32的PID算法控制直流电机系统设计
统, 利用位置传感 器信号 作为 反馈 , 和数字 P I D算法 结合 来 控 制速度 , 达到 了理想 的控制效果 。
值为机 电速度 。系统 还可 以通过 修改 内部 程序 来实 现控 制
直 流 电机 正 反 转 等 辅 助 功 能 。 图 书在 图书 馆 后 , 利用 条码 的置换 功 能 , 把 丢 失 图 书 条 形 码 置换成一个新 的条形码 后 , 将 新 的条码 号 贴在 新的 图书 上 , 这 本 图 书就 可 进 行 下 一 次 的 流 通 。 这 样 的 处 理 在 对 于 系 统
2 0 1 7年 第 1 6 卷 第 2 期
基于 S T M 3 2的 P I D算 法 控 制 直 流 电机 系统 设 计
口 林 森 刘 志 东 吕庆 军
【 内容摘要 】 为提 高直流 电机数字化的精 密可控性 , 以及 解决 P I D算 法参数在 控制 直流 电机 中具 有一定的复 杂性 问题 , 故本 文
现象的发生 , 能够及 时快捷地改 正工作 人员在操 作上 的错 误
而带来工作上的失误 , 使 流通管理部 门更 好地开 展对 读者 的
服务 , 系统 的 功 能 给 工 作 带 来 了 极 大 的 便 利 。
数据没有任何影 响的前提下 , 就可以非常方便地把 “ 丢 书” 的
处理工作完成 , 提高 了工作 效率 , 减 少 了 广 大 读 者 经 济 上 的 浪费 。 总之 , 整个 l n t e r r l i b系 统 纷 繁 复 杂 , 人 机 交 换 界 面 却 很 友 好 亲和, 便于操作和使用。
基于STM32的直流电机PID调速系统设计概要
基于STM32的直流电机PID调速系统设计概要概述:直流电机PID调速系统是一种常见的电机调速方法,它通过对电机的测量信号和设定信号进行比较,并生成控制信号来调节电机的运行速度,以实现精确的速度控制。
本文将以STM32为基础,概括地介绍基于STM32的直流电机PID调速系统的设计概要。
系统框架:基于STM32的直流电机PID调速系统主要由电机驱动模块、传感器模块、PID控制算法模块和用户界面模块组成。
其中,电机驱动模块负责对电机进行驱动控制,传感器模块用于获取电机的实际运行速度,PID控制算法模块用于计算电机的控制信号,用户界面模块用于显示和设置电机的运行参数。
电机驱动模块:电机驱动模块是直流电机PID调速系统的核心部分,它负责将控制信号转换为电机运行所需的电压和电流。
在STM32中,可以使用PWM输出来控制电机的驱动电压,通过调节PWM的占空比来改变电机的运行速度。
同时,还可以使用IO端口控制电机的正反转和停止等动作。
通过STM32的GPIO和PWM模块,可以很方便地实现对直流电机的驱动控制。
传感器模块:传感器模块用于获取电机的实际运行速度,常见的传感器包括编码器和霍尔传感器。
编码器可以通过测量电机轴上的旋转角度来获取电机的实际速度,而霍尔传感器可以通过检测电机磁极的变化来获取电机的转速。
在STM32中,可以通过外部中断或定时器模块来获取传感器的信号,并进行相应的计算。
PID控制算法模块:PID控制算法模块是直流电机PID调速系统的关键部分,它根据电机的实际运行速度和设定速度之间的误差,计算出相应的控制信号,以驱动电机的运行速度逐渐逼近设定速度。
PID控制算法一般包括比例控制、积分控制和微分控制三个部分,可以通过调节PID参数来提高系统的调速性能。
在STM32中,可以使用定时器和中断来实现PID控制算法的运行。
用户界面模块:用户界面模块用于显示和设置电机的运行参数,通过外部触摸屏或按钮等设备,用户可以方便地设置电机的设定速度、PID参数等参数,并实时显示电机的实际速度、PID输出等调试信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《计算机控制技术课程设计》题目:基于STM32的直流电机PID调速学院:计算机与电子信息学院专业: 电气工程及其自动化班级:电气12-5学号: 1******0515姓名:任课教师:完成时间: 2015.11.18——2015.12.30基于STM32的直流电机PID调速摘要电机转速控制在运动控制系统中占有至关重要的地位,本设计将电机转速控制作为研究对象;以PID为基本控制算法,STM32F103单片机为控制核心,产生受PID算法控制的PWM脉冲实现对直流电机转速的控制。
同时利用光电传感器将电机速度转换成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。
在系统中采320×240TFTLCD显示器作为显示部件,通过4个按键通过界面切换方式设置P、I、D、V四个参数和正反转控制,启动后可以通过显示部件了解电机当前的运行状态和系统的CPU温度。
该系统控制精度高,具有很强的抗干扰能力。
关键词:PID 直流电机反馈调节ﻬBased on theSTM32PIDspeed control of dc motorAbstractMotor speed control occupiesa crucialpositionin themotion controlsystem,the design of the motor speed control for the study; in the basic PIDcontrol algorithm,STM32F103 micr ocontrollercore,by the PIDcontrol algorithm generatesa P WM pulseto achieve DCspeed control. Atthe same time theuse of photoelectricsensorsto convert the motorspeedto pulse frequency feedback tothe microcontrollerto achieve closed-loopspeedcontrol, tospeed static error adjustmentpurposes. Mi ning320 ×240TFTLCD monitorasadisplay unit in the system, through four key settings P, I,D, V four parameters and reversing control through the interfaceswitching mode,startto understand the current state of the motor and th esystem through the displayunit CPUtemperature.Thesystem control and high precision,has a strong anti-jamming capability.Keywords: PIDDCmotor feedback regulation目录1.绪论............................................................................................................. 11.1研究背景与意义ﻩ11.2本文主要研究方法 (1)2.设计方案与论证 (2)2.1系统设计方案............................................................................................................................. 22.2控制器模块设计方案ﻩ23. 系统硬件电路设计ﻩ33.1整体电路设计 (3)3.1.1整体理论 (3)3.1.2整体简单结构图和资源分配图................................................................................ 33.2最小单片机系统设计 (4)3.2.1STM32F103复位电路 (6)3.2.2电源电路ﻩ63.3电机驱动电路设计ﻩ73.4光电码盘编码器电路设计ﻩ73.5显示电路设计ﻩ83.6按键电路设计ﻩ104. 系统软件设计ﻩ104.1PID算法ﻩ104.2PID参数整定方法 ............................................................................................................... 11 4.3电机速度采集算法................................................................................................................... 124.4程序流程图ﻩ125. 系统调试ﻩ135.1软件调试 (13)5.2系统测试与分析 ...................................................................................................................... 146. 总结与展望............................................................................................... 15参考文献ﻩ16附录一部分程序源程序ﻩ17附录二系统界面实物图和PCB图ﻩ201.绪论1.1研究背景与意义电动机在现代的工业中,是主要的驱动设备,尤其是直流电动机,由于它的平滑调速性和结构上的简单,使其成为许多电器,如洗衣机,电梯等的驱动。
而对于直流电机的控制,最流行的莫过于采用可控硅装置向电动机供电,即KZ—D拖动系统。
起初的控制系统是发电机—电动机系统,相当的笨重。
随着电力电子技术和单片机的成熟应用[1],使得直流电机调速系统从模拟化向数字化转变。
而PWM脉宽调制,是现在应用最成熟的方法。
它来源于电力电子的桥式电路,通过单片机可进行简单的模拟,而将它们结合起来,由电力电子元件组桥进行方向控制,而由单片机产生PWM波控制晶闸管的门极。
调节占空比就能够控制电机的平均电压,从而控制电机的转速。
直流电动机调速应用于实际中各个方面,工业,家电等,因为它能够在一个相当大的范围内进行平滑调速。
但是早起以模拟元件为控制装置的系统,由于模拟元件本身的缺陷,导致硬件复杂,功能简单,不灵活,误差大,无法实行精确的调速。
单片机的应用解决了这个问题的一部分,误差可由许多完善的算法来解决,而且减小了硬件的复杂性[2]。
使得直流调速逐步由模拟化向数字化转变,使直流调速进入一个更加智能与可靠的新阶段。
1.2本文主要研究方法本文主要研究了利用STM32系列单片机,通过PWM方式控制直流电机调速的方法[3]。
PWM控制技术以其控制简单、灵活和动态响应好的优点而成为电力电子技术最广泛应用的控制方式,也是人们研究的热点。
由于当今科学技术的发展已经没有了学科之间的界限,结合现代控制理论思想或实现无谐振软开关技术将会成为PWM控制技术发展的主要方向之一[4]。
本文就是利用这种控制方式来改变电压的占空比实现直流电机速度的控制。
文章中采用了专门的芯片组成了PWM信号的发生系统[5],然后通过L298N放大来驱动电机。
利用光电编码盘器测得电机速度,然后反馈给单片机,在内部进行PID运算,输出控制量完成闭环控制,实现电机的调速控制。
2.设计方案与论证2.1 系统设计方案根据系统设计的任务和要求,设计系统方框图如图1所示[6]。
图中控制器模块为系统的核心部件,键盘和显示器用来实现人机交互功能,其中通过键盘将需要设置的参数和状态输入到单片机中,并且通过控制器显示到显示器上。
在运行过程中控制器产生PW M脉冲送到电机驱动电路中,经过放大后控制直流电机转速,同时利用速度检测模块将当前转速反馈到控制器中,控制器经过数字P ID 运算后改变PWM 脉冲的占空比,实现电机转速实时控制的目的[7]。
ﻩ图1 系统方案框图 2.2 控制器模块设计方案根据设计任务,控制器主要用于产生占空比受数字PID 算法控制的PWM 脉冲,并对电机当前速度进行采集处理,根据算法得出当前所需输出的占空比脉冲。
对于控制器的选择有以下二种方案。
方案一:采用F PGA (现场可编辑门列阵)作为系统的控制器,FPGA 可以实现各种复杂的逻辑功能,模块大,密度高,它将所有器件集成在一块芯片上,减少了体积,提高了稳定性,并且可应用EDA软件仿真、调试,易于进行功能控制。
FPGA 采用并行的输入输出方式,提高了系统的处理速度,适合作为大规模实时系统的控制核心。
通过输入模块将参数输入给F PGA ,FPGA 通过程序设计控制P WM脉冲的占空比,但是由于本次设计对数据处理的时间要求不高,FPGA 的高速处理的优势得不到充分体现,并且由于其集成度高,使其成本偏高,同时由于芯片的引脚较多,实物硬件电路板布线复杂,加重了电路设计和实际焊接的工作[8]。
方案二:采用STM32F103作为系统控制的方案。
STM32F103单片机算术运算功能强,软件编程灵活、自由度大,可用软件编程实现各种算法和逻辑控制。
相对于F PGA来说,它的芯片引脚少,在硬件很容易实现。
并且它还具有功耗低、体积小、技术成熟和成本低等优点,在各个领域中应用广泛。
综合上述两种方案比较,采用STM32F103作为控制器处理输入的数据并控制电机运动较为简单,可以满足设计要求。
因此在本次设计选用方案二。
3.系统硬件电路设计3.1整体电路设计3.1.1整体理论单片机直流电机调速简介:单片机直流调速系统可实现对直流电动机的平滑调速。
PWM是通过控制固定电压的直流电源开关频率,从而改变负载两端的电压,进而达到控制要求的一种电压调整方法。
在PWM驱动控制的调整系统中,按一个固定的频率来接通和断开电源,并根据需要改变一个周期内“接通”和“断开”时间的长短。
通过改变直流电机电枢上电压的“占空比”来改变平均电压的大小,从而控制电动机的转速。
因此,PWM又被称为“开关驱动装置”。
本系统以89C52单片机为核心,通过单片机控制,C语言编程实现对直流电机的平滑调速[9]。