基于labVIEW的步进电机驱动系统设计
基于Labview的步进电机闭环控制系统设计
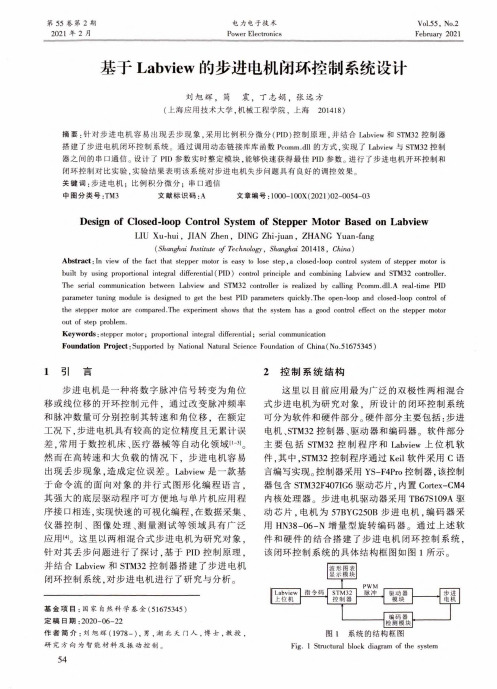
第55卷第2期2021年2月电力电子技术Power ElectronicsVol.55,No.2February2021基于Labview的步进电机闭环控制系统设计刘旭辉,简震,丁志娟,张远方(上海应用技术大学,机械工程学院,上海201418)摘要:针对步进电机容易出现丢步现象,釆用比例积分微分(PID)控制原理,并结合Labview和STM32控制器搭建了步进电机闭环控制系统。
通过调用动态链接库库函数Pcomm.dll的方式,实现了Labview与STM32控制器之间的串口通信。
设计了PID参数实时整定模块,能够快速获得最佳PID参数。
进行了步进电机开环控制和闭环控制对比实验,实验结果表明该系统对步进电机失步问题具有良好的调控效果。
关键词:步进电机;比例积分微分;串口通信中图分类号:TM3文献标识码:A文章编号:1000-100X(2021)02-0054-03Design of Closed-loop Control System of Stepper Motor Based on Labview LIU Xu-hui,JIAN Zhen,DING Zhi-juan,ZHANG Yuan-fang(Shanghai Institute of Technology,Shanghai201418,China)Abstract:In view of the fact that stepper motor is easy to lose step,a closed-loop control system of stepper motor is built by using proportional integral differential(PID)control principle and combining Labview and STM32controller. The serial communication between Labview and STM32controller is realized by calling Pcomm.dll.A real-time PID parameter tuning module is designed to get the best PID parameters quickly.The open-loop and closed-loop control of the stepper motor are compared.The experiment shows that the system has a good control effect on the stepper motor out of step problem.Keywords:stepper motor;proportional integral differential;serial communicationFoundation Project:Supported by National Natural Science Foundation of China(No.51675345)1引言步进电机是一种将数字脉冲信号转变为角位移或线位移的开环控制元件,通过改变脉冲频率和脉冲数量可分别控制其转速和角位移,在额定工况下,步进电机具有较高的定位精度且无累计误差,常用于数控机床、医疗器械等自动化领域〔7。
基于LabVIEW的步进电机控制
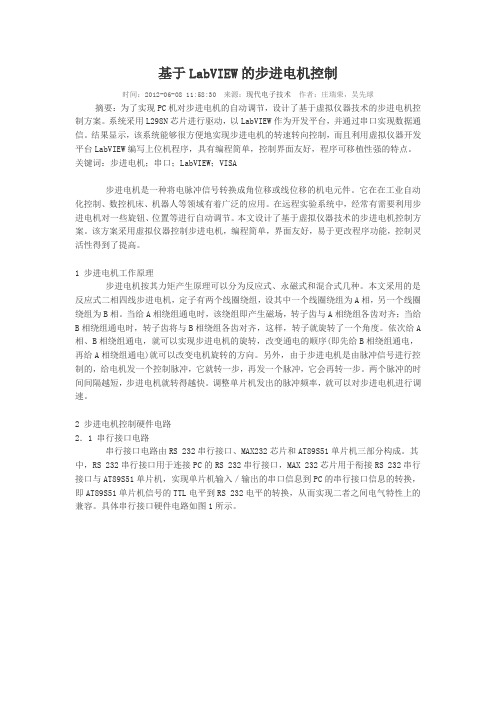
基于LabVIEW的步进电机控制时间:2012-06-08 11:58:30 来源:现代电子技术作者:庄瑞荣,吴先球摘要:为了实现PC机对步进电机的自动调节,设计了基于虚拟仪器技术的步进电机控制方案。
系统采用L298N芯片进行驱动,以LabVIEW作为开发平台,并通过串口实现数据通信。
结果显示,该系统能够很方便地实现步进电机的转速转向控制,而且利用虚拟仪器开发平台LabVIEW编写上位机程序,具有编程简单,控制界面友好,程序可移植性强的特点。
关键词:步进电机;串口;LabVIEW;VISA步进电机是一种将电脉冲信号转换成角位移或线位移的机电元件。
它在在工业自动化控制、数控机床、机器人等领域有着广泛的应用。
在远程实验系统中,经常有需要利用步进电机对一些旋钮、位置等进行自动调节。
本文设计了基于虚拟仪器技术的步进电机控制方案。
该方案采用虚拟仪器控制步进电机,编程简单,界面友好,易于更改程序功能,控制灵活性得到了提高。
1 步进电机工作原理步进电机按其力矩产生原理可以分为反应式、永磁式和混合式几种。
本文采用的是反应式二相四线步进电机,定子有两个线圈绕组,设其中一个线圈绕组为A相,另一个线圈绕组为B相。
当给A相绕组通电时,该绕组即产生磁场,转子齿与A相绕组各齿对齐;当给B相绕组通电时,转子齿将与B相绕组各齿对齐,这样,转子就旋转了一个角度。
依次给A 相、B相绕组通电,就可以实现步进电机的旋转,改变通电的顺序(即先给B相绕组通电,再给A相绕组通电)就可以改变电机旋转的方向。
另外,由于步进电机是由脉冲信号进行控制的,给电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的时间间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
2 步进电机控制硬件电路2.1 串行接口电路串行接口电路由RS 232串行接口、MAX232芯片和AT89S51单片机三部分构成。
其中,RS 232串行接口用于连接PC的RS 232串行接口,MAX 232芯片用于衔接RS 232串行接口与AT89S51单片机,实现单片机输入/输出的串口信息到PC的串行接口信息的转换,即AT89S51单片机信号的TTL电平到RS 232电平的转换,从而实现二者之间电气特性上的兼容。
LabVIEW的步进电机控制系统设计
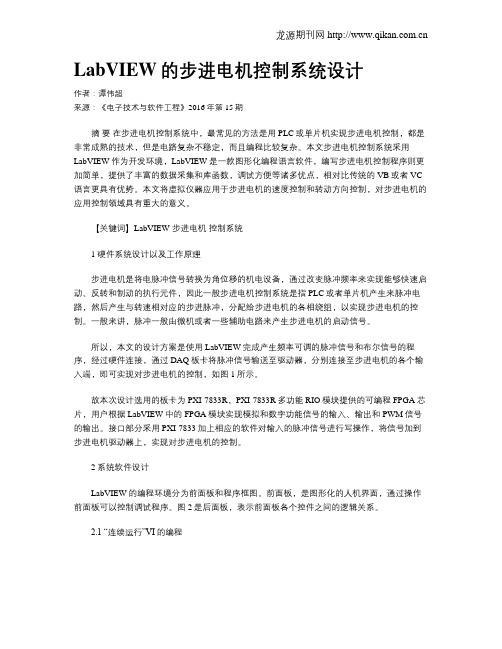
LabVIEW的步进电机控制系统设计作者:谭伟超来源:《电子技术与软件工程》2016年第15期摘要在步进电机控制系统中,最常见的方法是用PLC或单片机实现步进电机控制,都是非常成熟的技术,但是电路复杂不稳定,而且编程比较复杂。
本文步进电机控制系统采用LabVIEW作为开发环境,LabVIEW是一款图形化编程语言软件,编写步进电机控制程序则更加简单,提供了丰富的数据采集和库函数,调试方便等诸多优点,相对比传统的VB或者VC 语言更具有优势。
本文将虚拟仪器应用于步进电机的速度控制和转动方向控制,对步进电机的应用控制领域具有重大的意义。
【关键词】LabVIEW 步进电机控制系统1 硬件系统设计以及工作原理步进电机是将电脉冲信号转换为角位移的机电设备,通过改变脉冲频率来实现能够快速启动、反转和制动的执行元件,因此一般步进电机控制系统是指PLC或者单片机产生来脉冲电路,然后产生与转速相对应的步进脉冲,分配给步进电机的各相绕组,以实现步进电机的控制。
一般来讲,脉冲一般由微机或者一些辅助电路来产生步进电机的启动信号。
所以,本文的设计方案是使用LabVIEW完成产生频率可调的脉冲信号和布尔信号的程序,经过硬件连接,通过DAQ板卡将脉冲信号输送至驱动器,分别连接至步进电机的各个输入端,即可实现对步进电机的控制,如图1所示。
故本次设计选用的板卡为PXI-7833R,PXI-7833R多功能RIO模块提供的可编程FPGA芯片,用户根据 LabVIEW中的FPGA模块实现模拟和数字功能信号的输入、输出和PWM信号的输出。
接口部分采用PXI-7833加上相应的软件对输入的脉冲信号进行写操作,将信号加到步进电机驱动器上,实现对步进电机的控制。
2 系统软件设计LabVIEW的编程环境分为前面板和程序框图。
前面板,是图形化的人机界面,通过操作前面板可以控制调试程序。
图2是后面板,表示前面板各个控件之间的逻辑关系。
2.1 “连续运行”VI的编程根据步进电机工作原理,该控制系统应该实现连续运转运行和角度运转,所以程序用case 结构用来选择不同的运行状态。
基于LabVIEW和单片机的步进电机控制系统设计

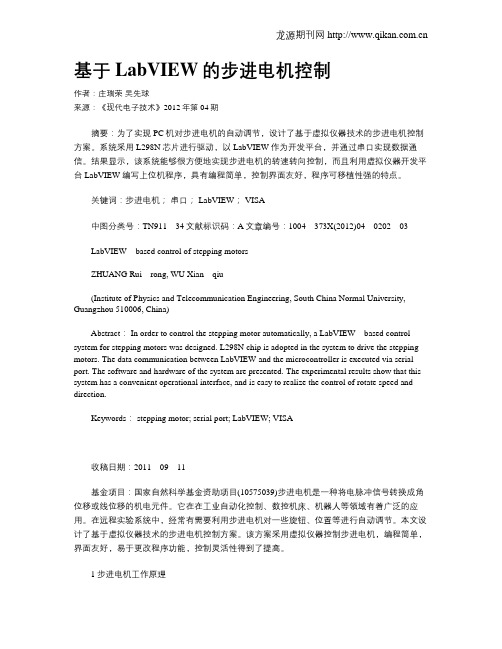
基于LabVIEW和单片机的步进电机控制系统设计黄章华;陆华忠;李灌辉【摘要】以AT89S52单片机和单总线数字温度传感器DS18B20及步进电机为主要器件制作测控电路.上位机以温度为主要参数,通过串口控制步进电机的正转、反转和加速、减速.C51程序实现对传感器的数据采集和与上位机的串行通信,LabVIEW实现测温波形动态显示、数据存储、越限报警和电机控制.经实际运行,系统能够较好地控制步进电机,可用于需要及时检测温度并进行步进电机控制的场合.【期刊名称】《现代电子技术》【年(卷),期】2007(030)017【总页数】3页(P179-181)【关键词】单片机;LabVIEW;DS18B20;步进电机【作者】黄章华;陆华忠;李灌辉【作者单位】华南农业大学,工程学院,广东,广州,510642;华南农业大学,工程学院,广东,广州,510642;华南农业大学,工程学院,广东,广州,510642【正文语种】中文【中图分类】TP2151 引言LabVIEW是美国国家仪器公司(National Instrument)开发的一种虚拟仪器平台。
他是一种图形化编程语言,具有强大功能,提供了丰富的数据采集、分析和存储库函数,比传统的文本式语言更具有优势。
但用LabVIEW开发的虚拟仪器通常需要价格昂贵的数据采集硬件,而以单片机为核心的数据采集与处理系统虽然硬件成本较低,但开发过程较为复杂,编程工作量较大。
如果将以单片机为核心的小系统作为前端的数据采集系统,通过LabVIEW提供的串口子VI将采集到的数据传送到上位机,在LabVIEW环境下对数据进行处理与分析,并进行相关控制,既可充分利用LabVIEW的强大功能,又可降低系统的开发成本,成为扩展LabVIEW应用范围的一个途径。
本系统以AT89S52单片机和单总线数字温度传感器DS18B20组成前端数据采集系统,以同一单片机和步进电机驱动电路组成后端控制系统。
单片机通过串行通信电路,将采集的温度数据传给上位机,上位机程序采用LabVIEW编写,可实现动态显示测温波形、存储数据和设定报警温度等功能,并可根据不同的报警温度通过串口控制单片机,驱动步进电机正反转和加减速,也可直接手动控制电机的运转。
基于labview的步进电机控制系统设计

基于labview的步进电机控制系统设计作者:范志华刘枫董润坚杨光胡浩康平来源:《农业与技术》2016年第13期摘要:本文以虚拟仪器技术为理论基础,应用labVIEW软件替代硬件电路的方式,实现了步进电机控制系统的设计。
本文详细介绍了利用485串口进行通信,采用labview编程来实现控制步进电机的正、反转的过程。
系统具有良好的软件交互界面和良好的实时性,可以根据需要实时对步进电机运行速度和时间进行设置。
该系统提高了步进电机控制过程的自动化和智能化水平,为步进电机在控制领域的应用,提供了一种简便易行的方法。
关键词:步进电机;labVIEW;控制系统中图分类号:TP273 文献标识码:A DOI:10.11974/nyyjs.20160732006步进电机越来越多运用到众多领域,尤其在现代速度、位置等控制领域中更得到广泛应用。
步进电机的测控系统的设计也在不断的改革创新,已从传统的运用逻辑电路或单片机实现控制向以软件控制为主的方式转变。
通过用LabIEW系统软件编程实现对步进电机的位置控制和速度控制,解决了传统的步进电机控制系统中靠硬件来实现的线路复杂、不易调整的问题,是一种很好的控制方式。
1 labVIEW与步进电机简介labVIEW是一款虚拟仪器开发平台软件,主要应用于数据采集和分析、仪器控制、测试测量等领域。
它应用各种图表、图形符号、连线等方式进行编程,是一种图形化语言。
它的特点是编程方式直观简便、设备驱动程序众多并且是源码级别的、分析和表达功能多种多样。
labVIEW的这些优势使用户在实际应用中能够快捷地构筑自己所需要的控制系统。
步进电机是一种感应电机,不像普通的直流电机和交流电机可以在常规下使用,它必须与相应的控制系统配套使用。
步进电机的运转只与脉冲信号的频率、脉冲数有关,它把双环形电脉冲信号转变成线位移或角位移,即脉冲个数决定角位移量,脉冲频率决定步进电机转动的速度和加速度。
而且位移速度与脉冲频率、角位移量与脉冲数均成正比关系,加上步进电机只存在周期性的误差而没有累积误差等特点,使得在速度、位置等控制领域使用步进电机来控制变得异常简单。
基于LabVIEW的UIM241步进电机驱动系统设计

第29卷第5期 2017年10月北方工业大学学报J.N O R T H C H I N A U N I V.O F T E C H.Vol.29 N o.5Oct.2017基于LabVIEW的UIM241步进电机驱动系统设计赵宇红 金夺杨婉婉 张颖超(北方工业大学电子信息工程学院,100144,北京)摘要本文设计了一种基于L a b V I E W的步进电机驱动系统.该驱动系统由L ab V IE W 设计的上位机和U I M241步进电机的下位机组成,通过L a b V I E W中的V I S A控件实现上位机与下位机的串口通信,最终由L a b V I E W上位机控制步进电机并驱动负载平台运行.整个驱动系统成本低,上位机界面简单直观,具有可扩展性.关键词L a b V IE W;串口通信;步进电机分类号TP271大规模数字集成电路单粒子效应地面模拟 试验是电子器件可靠性试验的重要组成部分,是 集微电子、核物理、实验方法等为一体的系统工 程.电子器件复杂度的提高对地面模拟试验的试 验方法与测试系统的设计提出了严峻挑战.单粒子效应地面模拟试验的基本方法是通 过加速器模拟空间辐射环境产生髙能粒子,轰击 被测器件,通过测试系统给被测器件施加测试激 励,检测其响应,通过故障模型来统计各种辐射 效应发生的情况.为支持单粒子辐照模拟实验的研究,提高实 验效率,测试系统采用一种旋转垂直的架构,将 样品从以往平面布局的方式扩展到三维立体空 间,样品数目增加4倍,其中旋转结构由步进电 机驱动完成.1驱动系统的硬件设计驱动系统的原理框图如图1所示,驱动系统 包括2大部分:由L a b V I E W制作的上位机[1]和步进电机[2].两者采用D B9串口线相连接,上位机的作用是通过R S232串口通信,控制步进电机 旋转角度,选择适合的波特率、数据位、校验位,实时接收和显示步进电机的反馈信息.k驱动步进电机上位机V_k V58300平台步进电机V反馈图1驱动系统原理1.1步进电机驱动器本设计采用U I M241步进控制系统,包括步 进电机及运动控制器[3]如图2所示,运动控制器 通过法兰直接固定在步进电机上,减少系统连 线.控制器可实现开环或者基于正交编码器的自 闭环控制,完成预定角度的精准命中.其控制系 统包括:通讯模块、基本运动控制模块、绝对位置 计数器、正交编码器界面以及事件变化通知模块.此外还有3个可选控制模块:髙级运动控制、编码器闭环控制模块和传感器输入控制模块.实收稿日期:2017-05-17第一作者简介:赵宇红,副教授.研究方向:多媒体通信技术与现代电路理论.第5期赵宇红等:基于Lab V IEW的UIM241步进电机驱动系统设计39验证明使用高级运动控制模块,U I M241能在〇•25秒内将57电机从0转/分加速到4000转/分.驱动系统采用3线制接线方式,如图3所示.图2步进电机及其运动控制器图3步进电机控制器的接线方式1.2 V58300 平台V58300平台由P C B母板和D U T装载板组 成,如图4所示.运动控制系统位于结构中心位 置,与外框固定连接,通过扭矩带动F P G A板旋 转,完成被测样品切换、控制辐射角度.图4 V58300平台2驱动系统的软件设计软件系统的设计目标是通过Lab V I E W上 位机控制步进电机的旋转运动,并显示其旋转 角度.系统通过以下命令完成所有操作:位置初始 化命令、旋转速度命令、相对位移的命令、使能命 令以及位置确认的命令.具体的执行过程为:电机接收到命令后驱动负载平台进行指定动作并 进行相应命令的反馈,上位机接收到这些反馈信 息后,加以解析并输出在由L a b V I E W制作的显 示控件中,为操作人员提供相应的参考.图5为电机上位机程序流程.2.1程序实现方法U I M241是本程序的下位机,U I M241采用 了 R S232通讯控制[«,上位机通过串行口连接到 运动控制器,向运动控制器发送字符串命令,即可控制步进电机,之后下位机会发送相应指令的 反馈到上位机,由上位机进行解析并显示在终端 上,通信波特率则可以通过上位机进行选择.由 此可以参照用R S232串口传输的方法,采用VIS A VI 及相关函数,如:Visa Read、Visa write 作 为主体程序结构,根据最简化原则及方便操作的 目标,以单击按钮的形式发送命令,采用事件结 构作为程序的框架.表1是整个程序的指令集.40北方工业大学学报第29卷图5电机上位机程序流程表1驱动系统发送指令集作用字符串命令电机位置初始化〇rg;设置步进电机的旋转角度、相对位移、以及使能变化spd3000; qecO;ena;spd3000;qec2590;ena;spd3000; qec5180;ena;spd3000; qec7 770;ena;查询电机当前置qec;2.2程序前面板下图6为上位机的前面板.其中“电机V I S A 资源名称”用于设置电机串口号,“初始化缓冲 区”用于显示原始未处理的初始化反馈命令,“运 动控制缓冲区”用于显示原始未处理的发送及位置确认的反馈命令,“状态”用于显示经处理过的 电机反馈信息包括:初始化完成、旋转具体角度等,“子板选择”对应控制步进电机驱动负载转动的角 度,通过按钮触发的方式,控制发送电机命令.图6上位机前面板2.3程序后面板程序采用了经典的事件结构[5],在while循 环里完成触发,本程序事件结构的触发事件为前 面板的3个触发按钮(“初始化”“发送”“位置确 认”)发生动作即执行相应事件结构分支.第5期赵宇红等:基于Lab V IEW 的UIM 241步进电机驱动系统设计412.3.1初始化事件分支部分如图7所示,该事件分支的功能是使电机初 始化,并得到初始化反馈.信号经过V I S A 串口 配置和V I S A 设置缓冲区大小,通过V I S A 写入 函数输入“〇rg;”命令,经过200m s 延时和属性节 点,通过V I S A 读取并显示在初始化缓冲区中,如 果反馈等于既定指令,那么在状态中显示初始化 完成.2.3.2发送事件分支如图8所示,该事件分支的功能是发送控制 电机转动的指令,并获取反馈.发送事件分支和初 始化事件分支的发送接收架构基本一致.通过发 送值改变来触发.数据的发送端创建了一个下拉 列表,下拉列表连接到条件结构中判断选择相应的字符串发送,每个字符串代表着不同的旋转 位置.因为发送事件分支发送的1个指令是分3 次发送(第1次spdxxxx;第2次qecxxxx;第3 次ena;),所以需要移位寄存器把接收的这3次 拼接起来,通过读取缓冲区输出.对于显示部分, 接收到的字符串由数组遍历通过条件结构显示 在状态栏中.2.3.3确认事件分支如图9所示,该事件分支的功能是通过发送 “qec;”查询电机的相对位置,判断是否在预期位 置,并得到相应反馈,并将反馈通过条件结构显 示在状态栏中.表2为字符串及反馈命令集.图8发送事件部分42北方工业大学学报第29卷表2驱动系统字符串反馈命令集字符串命令反馈命令〇rg;spd3000;qecO ;ena ; spd3000;qec2590;ena ; spd3000;qec5180;ena ; spd3000;qec7 770;ena ;CC00 B100 0000 0000 FFAA00 B500 1738 F F A A 00B8 0000 0000 00FF AA00 6F0A 0017 3800 0000 0000 FF AAOO B500 1738 F F A A 00B8 0000 0014 1EFF AAOO 7F0A 0017 3800 0000 0000 FF AAOO B500 1738 F F A A 00B8 0000 0028 3CFF AAOO 7F 〇A 0017 3800 0000 0000 FF AAOO B500 1738 F F A A 00B8 0000 003C 5AFF AAOO 7F0A 0017 3800 0000 0000 FFCCOO B100 0000 0000 FF CCOO B100 0000 141E FF CCOO B100 0000 283C FF CCOO B100 0000 3C5A FF3实验过程及结果本实验的上位机版本及操作环境为Lab-V I E W 2012和Windows 7,下位机选用的是优爱 宝公司的U I M 241步进电机,供电电压为12V , 输出电流为2A ,上位机和下位机采用D B 9接头 的串行接口线相连接,步进电机的一^端和V 58300负载平台相连接,如图10所示.通过控 制步进电机使负载实现逆时针90°,180°,270°旋 转,完成试验要求.图11〜13分别为旋转至相应 角度时的上位机界面.图10步进电机与V 58300平台相连第5期赵宇红等:基于Lab V IEW的UIM241步进电机驱动系统设计43\/T C A咨酱交始%COM12^|COM7g J S电机停止回运动控釗缓冲区ICCOOBIOOC淹取李'巾F■ AA00 B500 1738 FFAA 00B8 0000 0014 1EFF |I a A00 7F0A 0017 3800 0000 0000F^^^^[S i9〇5*;初跳::图11逆时针旋转90°电机VISA资源名称&COM7运动控釗缓冲区■ CC00 B100 0000 0000 FF读取缓沖区AA00 B500 1738 FFAA 00B8 0000 0028 3CFFAA00 7F0A 0017 3800 0000 0000 F:180 度!人图12逆时针旋转180°私 COM12_________电机VISA资源名称%|C〇M7im夸止fl运动控制缓冲区|CCQ0 B100 0000 0000 FF读取缓)中区AA00 B500 1738 FFAA 00B8AA00 7F0A 0017 3800 00000000C0000F妄至270度!图13逆时针旋转270°实验标准可概述为电机带动负载完成逆时 针90°,180°,270°旋转,并且误差小于2°.实验结 果如表3所示,满足实验标准.表3旋转角度测试实验结果步进电机预计旋转角度/°步进电机实际旋转角度/°绝对误差/°0009089.40.4180181.1-1. 1270269.50.5对于实验的后期工作来说,可以改变程序完 成其他角度的旋转来满足辐照实验,也可以通过Lab V I E W的可扩展性增添新的功能,比如增加 实时的速度反馈和角度反馈等,相比于传统的硬 件来说,要更加灵活.4结语本文主要阐述了 V58300单粒子效应测试平 台上位机电机控制部分的Lab V I E W程序设计. 该程序通过串口通信,实现了控制步进电机的旋 转角度、设置零点位置、相对位移等以及获取即 时位置信息并加以显示等功能,经实际操作检验 后,步进电机驱动系统情况良好.参考文献[1]吕向锋,髙洪林,马亮,等•基于L a b V I E W串口通信的研究[J]国外电子测量技术,2009,28 (12):27-30[2]洪涛,严滔.L ab V IE W的步进电机控制方法研究[J].中国计量学院学报,2008,19(2):146-149[3] 优爱宝• U I M241X X系列使用手册[EB/OL].(2013-05-09)[2017-03-17]. https://wenku. b a i d u.com/view/8972c84ab84ae45c3b358c8f. html[4] 赵常寿,陈征祥,樊蓉•基于L a b V I E W和NI-VISA的RS232串口通信程序设计[J].电脑编程技巧与维护,2015(1) :68-70[5]陈树学,刘萱.L a b V I E W宝典[M].北京:电子工业出版社,2011(下转第80页)80北方工业大学学报第29卷Research on Data Quality Optimization Algorithms of Unprofessional Groundwater Monitoring Based on Law of DarcyJIN Xiaobo(Col. of Mechanical Engineering and Materials science,North China Univ, of T e c h.,100144,Beijing,China) Abstract Unprofessional groundwater monitoring well i s one of the important methods in groundwater monitoring.The continual pumping of water seriously affects the data quality of unprofessional monitoring well.Due to the mass flow from the agricultural-pumped-water well and the limited water level difference from the internal water level of water well to the water level from where the water i s pumped» the water level difference of internal water well can reach to a constant position in a short time, in the meanwhile the water level in the well only changes with the that of the external well's.To solve this problem, a kind of water level algorithm i s put forward based on the law of Darcy.With the algorithm we can calculate the real water level of external well according to the observation value of water level.A n d the algorithm i s used in the field experiment in the well in Longbao village, Xiaodian District, Taiyuan.The results show that the algorithm enables to increase the reliability of the observation data? which also lays a good foundation for the further analysis and research of the water level.Key Words Darc/s law; unprofessional groundwater; water level monitoring(上接第43页)The Design of Driving System for UIM241 Stepping MotorBased on Lab V IEWZ H A O Yuhong JIN Duo Yang W a n w an Zhang Yingchao(C ol. of Electronic Information Engineering, North China Univ. of Tech. , 100144, Beijing, China)Abstract This paper designs a stepper motor drive system based on Lab V I E W.The drive system i s consisted of a host computer designed by Lab V I E W and a lower computer of U I M241 stepping motor.The V I S A control in Lab V I E W realizes the serial communication between the supervisor and the lower computer, after which the Lab V I E W P C controls the stepper motor and drives the load platform to run.The cost of the entire drive system i s low and the host computer interface i s simple, intuitive, and extensible.Key Words Lab V I E W; serial communication; stepper motor。
基于LabVIEW的步进电机控制
基于LabVIEW的步进电机控制作者:庄瑞荣吴先球来源:《现代电子技术》2012年第04期摘要:为了实现PC机对步进电机的自动调节,设计了基于虚拟仪器技术的步进电机控制方案。
系统采用L298N芯片进行驱动,以LabVIEW作为开发平台,并通过串口实现数据通信。
结果显示,该系统能够很方便地实现步进电机的转速转向控制,而且利用虚拟仪器开发平台LabVIEW编写上位机程序,具有编程简单,控制界面友好,程序可移植性强的特点。
关键词:步进电机;串口; LabVIEW; VISA中图分类号:TN91134文献标识码:A文章编号:1004373X(2012)04020203LabVIEW based control of stepping motorsZHUANG Rui rong, WU Xian qiu(Institute of Physics and Telecommunication Engineering, South China Normal University, Guangzhou 510006, China)Abstract: In order to control the stepping motor automatically, a LabVIEW based control system for stepping motors was designed. L298N chip is adopted in the system to drive the stepping motors. The data communication between LabVIEW and the microcontroller is executed via serial port. The software and hardware of the system are presented. The experimental results show that this system has a convenient operational interface, and is easy to realize the control of rotate speed and direction.Keywords: stepping motor; serial port; LabVIEW; VISA收稿日期:20110911基金项目:国家自然科学基金资助项目(10575039)步进电机是一种将电脉冲信号转换成角位移或线位移的机电元件。
基于LabVIEW的步进电机控制系统设计
目录摘要 (II)Abstract ....................................................................................................... I II 目录.. (I)第1章绪论 (1)1.1课题研究的意义及现状 (1)1.2论文主要研究内容 (3)第2章步进电机控制系统总体方案设计 (4)2.1步进电机控制系统的方案选择 (4)2.2步进电机控制系统的开发软件选择 (6)第3章步进电机控制系统硬件的设计 (9)3.1概述 (9)3.2硬件的选择 (9)3.3硬件连线 (23)第4章步进电机控制系统软件的设计 (24)4.1软件编程环境的建立 (24)4.2“连续运行”VI的编程 (25)4.3“指定角度运行”VI的编程 (26)4.4主程序的编程 (27)4.5前面板的设计 (32)第5章实验 (34)5.1接线 (34)5.2软件调试 (36)5.3调试过程的总结 (37)结论 (38)参考文献 (39)致谢 (41)附件1 (42)附件2 (51)摘要步进电机作为执行机构,是机电一体化的关键产品之一。
步进电机突出的优点是它可以在宽广的频率范围内,通过改变脉冲频率来实现调速,快速起停、正反转控制等,并且由其组成的开环系统既简单、廉价,又非常可靠,广泛地应用在各种计算机控制的自动系统中。
随着微电子和计算机技术的发展,步进电机的需求和应用量与日俱增。
本文研究了步进电机的工作原理,对步进电机控制系统进行了整体方案的设计、硬件的选择及接线;在学习了LabVIEW的基础上,研究了LabVIEW FPGA模块的编程和应用;对PXI-7833R板卡进行了全面的学习,研究了如何使用LabVIEW对FPGA板卡进行编程;通过LabVIEW完成产生频率可调的脉冲信号和布尔信号的程序,经编译后下载到PXI-7833R板卡,以实现步进电机控制脉冲及方向信号的生成;完成了步进电机控制系统的软件设计,包括前面板设计、连续运转和指定角度运转程序以及步进电机启动和停止过程的加减速程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
权利要求书
1.一种基于labview的步进电机驱动系统,这种基于labview的步进电机驱动系统包括步进电机系统(1)和labview控制系统(2),其中的步进电机系统(1)包括直流电源(3)、驱动器(4)和步进电机(5),labview控制系统(2)包括NI计算机(6)和NI板卡(7),其特征在于:所说的步进电机系统(1)的控制信号是由labview控制系统(2)所编程序调节的。
说明书
技术领域
本实用新型涉及一种机械电器设备,即一种基于labview的步进电机驱动系统.
背景技术
基于单片机或基于工控机的步进电机控制系统都是比较成熟的公知技术.采用这些技术就可以在比较复杂的外界条件下有效地控制步进电机驱动.在现代社会中,我们会发现技术不断的更新,而每每更新技术,就相应的要带来更新仪器设备的问题,这不仅给企业公司带来沉重的资金负担,还对人类社会上的有限的自然资源和人力资源造成不必要的浪费.因此,导致技术更新迅速,而企业应用却相对落后.
发明内容
本实用新型的目的是:提供一种既节约成本,又方便更新换代的软件技术支持代替原本仪器的功能.既解约了资源,又使技术推广得以简单易行.
上述目的是由以下技术方案实现的:由labview提供软件平台,设计一种程序产成控制信号,由信号控制驱动器,驱动步进电机按照程序设定驱动设备.
所说的labview是美国国家仪器公司( National Instruments,简称NI)于80年代中期首先提出了基于计算机技术的虚拟仪器(virtual Instruments,简称VI)概念,把虚拟测试技术带入新的发展时期,随后研制和推出了基于多种总线系统的虚拟仪器.所谓虚拟仪器,实际上就是一种基于计算机的数字化测量
测试仪器。
它采用计算机开放体系结构取代传统的单机测量仪器,能对各种各样的数据进行计算机处理、显示和存储。
它可使用相同的硬件系统,通过不同的软件就可以实现不同的各种测量测试功能,即软件系统是虚拟仪器的核心.
所说的程序如下图1,程序采用并行设计.程序分为两部分,a是前面板,是图形化的人机界面,通过操作可以控制调试程序;b是后面板,表示的事前面板各个控件之间的逻辑关系。
本程序上部分是步进控制信号,用以产生一定幅值一定频率的方波,下部分采用一个while循环嵌套一个条件控件,由一个选择开关控制方向选择信号。
驱动器电气参数是
步进电机电气参数是
反应式步进电动机的转子齿数r Z基本上是由步距角的要求所决定,但是为了能实现“自动错位”,转子的齿数必须满足一定的条件,而不能是任意数值。
当定子的相邻极为相邻相时,在某一极下若定、转子的齿对齐时,则要求在相
邻极下的定、转子齿之间应错开转子齿距的1/m 倍,即它们之间在空间位置上错开360/ m r Z 角。
由此可得出这时转子齿数应符合下式条件 m K P Z r r 12±= (2-1)
式中 r P ——反应式步进电动机的定子极对数;
m ——电机的相数;
K ——正整数
图2-1 三相步进电动机的展开图
从图2-1给出的步进电动机定、转子展开图中可以看出:当A 极面下的定、转子齿对齐时,B 极和C 极极面下的齿就分别和转子齿相错三分之一的转子齿距,即3°。
从图2-1中可以看到,若断开A 相控制绕组而由B 相控制绕组通电,这时电机中产生沿B 极轴线方向的磁场。
同理,在磁阻转矩的作用下,转子按顺时针方向转过3°使定子B 极面下的齿和轮子齿对齐,相应定子A 极和C 极面下的齿又分别和转子齿相错三分之一的转子齿距,依此,当控制绕组按A-B-C-A 顺序循环通电。
转子就沿顺时针力向以每—拍转过3°的方式转动。
若改变通电顺序,即按A-C-B-A 顺序循序通电,转子便沿逆时针方向同样以每拍转过3°的方式转动。
此时为单三拍通电方式运行。
采用三相单双六拍通电方式运行,即按A-AB-B-BC-C-CA-A 顺序循环通电,步距角也减小一半,即每拍转子仅转过1.5°。
由以上分析可知,步进电动机的步距角θ的大小足由转子的齿数r Z 、控制绕组的相数m 和通电方式所决定,它们之间存在以下关系
C mZ r
360=θ (2-2) 式中通电状态系数,当采用单拍或双拍方式时,C =1;而采用单、双拍方式时,C =2。
若步进电动机通电的脉冲频率为f (即每秒的拍数或每秒的步数), 则步进电动机的转速为
C mZ f n r 60= (2-3) 反应式步进电动机是利用磁阻转矩使转子转动的,是我国目前使用最广泛的步进电动机型式。
同一台步进电动机,因通电方式不同,运行时的步距角θ也是不同的。
采用单双拍通电方式时,步距角要比单拍通电方式时减小一半。
在实际使用中,单三拍通电方式由于在切换时一相控制绕组断电而另一相控制绕组开始断电容易造成失步,此外,由单一控制绕组通电吸引转子,也容易使转子在平衡位置附近产生振荡,故运行的稳定性较差,所以很少采用。
通常将它改为“双三拍”通电方式。
附图说明
图1是前面板步进电机正传设置;
图2是前面板步进电机反转设置;
图3是前面板步进电机高速运转设置;
图4是前面板步进电机低速运转设置;
图5是后面板步进电机正传程序;
图6是后面板步进电机反转程序;
图7 是实施例的工作原理图;
图8是实施例的连线图;
图9是驱动器连线图;
图10 PCI PXI-6281 Pinout
图11 SCB-68
图12 原理图1
图13 原理图 2
具体实施方式
实施例:这种基于labview的步进电机驱动系统包括步进电机系统(1)和labview控制系统(2),其中的步进电机系统(1)包括直流电源(3)、驱动器(4)和步进电机(5),labview控制系统(2)包括NI计算机(6)和NI板卡(7)和接线盒(8),其特征在于:所说的步进电机系统(1)的控制信号是由labview控制系统(2)所编程序调节的。
(1)连线:直流电源(3)接220V交流电,输出端接驱动器(4),驱动器
(4)UVW三个接线端接步进电机(5),由接线盒(8)分别将步进控制信
号和方向信号接到驱动器(4)上.如图(8)。
(2)编程:在NI计算机提供的labview平台上编写步进电机控制程序,
前面板如图1,后面板如图5,图1-4分别是步进电机正转,反转,高
速,低速运转时前面板图;图5、图6是步进电机正反转时后面板程
序框图。
(3)调试:检查接线无误,程序预运行无误,接通直流电源的插座,选
定采样信息,调好幅值与频率启动程序,观察步进电机运转情况,
如不运转关闭程序,修改参数直到理想控制状态。
拨动正反转开关,
观察步进电机换向情况。
关闭程序,调节速度盘,比较步进电机速
度变换情况,找到理想控制速度。
图1 前面板步进电机正传设置
图2 前面板步进电机反转设置
图3 前面板步进电机高速运转设置
图4前面板步进电机低速运转设置
图5 后面板步进电机正传程序
图6 后面板步进电机反转程序
图8是
实施例的连线图;
图 7
图9 驱动器连线图
图10 PCI PXI-6281 Pinout
图11
图12 原理图1
图13 原理图2。