S和STM32的智能步进电机驱动控制模块设计
基于STM32的智能轮椅硬件设计及控制系统

总之,基于STM32智能家居系统的硬件设计需要充分考虑各组件的选型、电路 设计、电源和通信接口等因素,以确保系统的稳定性和可靠性。
参考内容二
智能家居控制系统设计
在基于STM32的智能家居控制系统中,我们首先需要选择适合的STM32型号, 并根据实际需求设计硬件和软件部分。在硬件方面,除了STM32微控制器外, 还包括各种传感器、执行器以及通信模块等。在软件方面,我们需要编写程序 来控制硬件设备,实现各种智能家居功能。
2、硬件模块
(1)电机驱动模块
智能轮椅需要电机驱动才能实现移动。本次演示选用无刷直流电机作为驱动对 象,采用电子调速器(ESC)进行控制。STM32通过PWM信号控制ESC,从而控 制电机的转速。为了保护电机和ESC,需要加入电流和电压检测模块,并将检 测信号通过ADC接口传入STM32。
(2)传感器模块
2、人机交互
人机交互方面,本次演示设计了一套基于触摸屏和按键的控制界面。控制界面 可以显示当前轮椅的状态信息(如速度、电量等),同时用户可以通过触摸屏 或按键对轮椅进行控制(如前进、后退、转向等)。另外,为了方便用户使用,
还加入语音识别和语音合成功能,用户可以通过语音控制轮椅(如“前进”、 “后退”等)。
硬件设计中还需要包括执行器的选择。执行器是智能家居系统的另一种重要组 件,用于控制家居设备的开关、调节设备的运行状态等。常见的执行器包括继 电器、步进电机、舵机等。本次演示选取了继电器和舵机作为执行器,通过 STM32单片机的GPIO口控制。
在硬件设计中,还需要考虑电源、通信接口等因素。电源是整个智能家居系统 的动力来源,需要根据系统各组件的功耗情况选择合适的电源。通信接口是系 统各组件之间进行信息交换的通道,可以选择有线或无线通信方式,如 Zigbee、WiFi等。
基于STM32的智能家居控制系统设计研究
基于STM32的智能家居控制系统设计研究一、本文概述随着科技的飞速发展和人们生活水平的提高,智能家居系统作为一种集成化、智能化的居住环境解决方案,正日益受到人们的青睐。
STM32作为一款性能卓越、应用广泛的微控制器,其强大的处理能力和丰富的外设资源使其成为智能家居控制系统设计的理想选择。
本文旨在深入研究基于STM32的智能家居控制系统设计,探索其关键技术、系统架构、功能模块以及实际应用价值。
本文将首先介绍智能家居控制系统的基本概念和发展现状,阐述STM32微控制器的特点及其在智能家居领域的应用优势。
随后,将详细介绍基于STM32的智能家居控制系统的总体设计方案,包括硬件平台的选择、系统架构的构建、功能模块的划分等。
在此基础上,本文将深入探讨各个功能模块的具体实现方法,如传感器数据采集、通信协议设计、控制算法优化等。
还将对系统的软件架构、程序编写及调试过程进行详细说明。
本文还将对基于STM32的智能家居控制系统的实际应用进行案例分析,评估其在实际环境中的性能表现和应用效果。
通过对比分析不同设计方案的优缺点,提出改进建议和未来发展方向。
本文将对整个研究过程进行总结,归纳出基于STM32的智能家居控制系统设计的关键技术和成功经验,为相关领域的研究和实践提供参考和借鉴。
二、STM32微控制器概述STM32微控制器是STMicroelectronics公司推出的一款基于ARM Cortex-M系列内核的高性能、低功耗、易于使用的微控制器。
它采用先进的ARMv7-M架构,结合了高性能、实时性、低功耗和易于编程的优点,因此在各种嵌入式系统和智能设备中得到了广泛应用。
STM32微控制器系列丰富,包括不同性能等级、引脚数量和功能配置的产品,以满足不同应用需求。
STM32微控制器具有丰富的外设接口,如GPIO、UART、SPI、I2C、USB等,方便与外部设备通信。
它还支持多种操作系统,如裸机、FreeRTOS、μC/OS等,方便开发者进行软件开发。
STM32直流电机控制程序简明教程

STM32直流电机控制程序简明教程1.硬件准备首先,我们需要准备好所需的硬件:-STM32开发板-直流电机-驱动器电路,如L298N或L293D-电源供应器(一般是12V直流电源)2.硬件连接将STM32开发板与驱动器电路连接,并将直流电机连接到驱动器电路上。
确保连接正确并牢固。
3.硬件初始化打开STM32开发环境(如Keil),创建一个新的工程。
然后,将需要的库文件添加到工程中,并根据开发板型号选择正确的芯片库。
接下来,配置和初始化GPIO引脚,用于连接和控制驱动器电路。
4.设置PWM输出利用STM32的PWM功能,我们可以产生一个周期性的方波信号来控制驱动器电路。
根据需要,配置一个或多个PWM输出引脚,并设置PWM的频率和占空比。
5.编写控制程序在主函数中,编写控制程序,以实现所需的电机控制功能。
以下是一些常见的功能:-正转和反转方向控制:使用GPIO引脚将方向信号发送至驱动器电路。
-速度控制:根据需要,使用PWM输出调整电机的速度。
-停止和启动:通过打开和关闭PWM输出,可以停止和启动电机。
7.测试和调试将电机供电,并通过调整控制程序中的参数,测试电机的正转、反转、速度控制等功能。
根据需要,可以使用调试工具来调试和优化程序。
总结:通过以上几个步骤,我们可以使用STM32控制直流电机。
请记住,在实际应用中,还可能需要处理其他问题,例如加速和减速控制、电机保护等。
希望这个简明教程能够帮助您入门直流电机控制,并且能够在您的项目中发挥作用。
如果您需要更详细的信息,建议参考STM32的官方文档和相关资料。
基于STM32的步进电机控制器设计
基于STM32的步进电机控制器设计熊远生;刘春元;蔡伟忠【摘要】为实现对多台步进电机的控制,开发了基于STM32的步进电机控制器,在硬件设计的基础上,将FreeModbus移植到STM32上,在eMBRegHoldingCB函数中实现了输出脉冲频率、输出脉冲个数、输出脉冲方向和输出脉冲终止信息的可设置和可查询,实验结果表明,所设计的步进电机控制器是可行的.【期刊名称】《制造业自动化》【年(卷),期】2019(041)005【总页数】4页(P39-41,105)【关键词】STM32;步进电机;FreeModbus【作者】熊远生;刘春元;蔡伟忠【作者单位】嘉兴学院机电工程学院,嘉兴314001;嘉兴学院机电工程学院,嘉兴314001;嘉兴学院机电工程学院,嘉兴314001【正文语种】中文【中图分类】TM383.60 引言步进电机转动的角度和输入驱动脉冲的个数成正比,其转动速率可以通过驱动脉冲的频率来控制,有较高的定位精度,无位置累积误差及特有的开环运行机制,与闭环控制系统相比,可减少系统成本,并提高了可靠性,具有较高的控制精度;因此,在精度要求不高的运动控制系统中,在工业领域得到了大量应用[1,2]。
为进一步提高控制精度,在实际应用中广泛应用步进电机细分驱动器,细分驱动器一般提供三个输入接口信号,ENA信号为脱机信号(低电平有效),当此输入控制端为低时,电机励磁电流被关断,电机处于脱机自由状态,此信号在大多数应用时一般悬空,DIR信号方向电平信号输入端,高低电平控制电机正/反转,PUL步进脉冲信号输入,每个信号提供两个输入端,内部用光耦实现隔离。
在工业控制中,有很多应用场合需要在上位机控制多个步进电机同时工作,如在水位传感器的初始螺栓位置调整中,为提高工作效率,希望10个步进电机在上位机控制下带动10个传感器同时进行位置调整。
但是上位机一般不能直接连接细分驱动器,通常采用PLC的普通输出端口连接细分驱动器的DIR信号,PLC的脉冲输出端口连接细分驱动器的PUL信号,PLC与上位机之间通过RS485连接。
基于STM32的智能跑步机控制系统设计
Ab s t r a c t : I n v i e w o f t h e p o s i t i o n i n t e l l i g e n c e 、 d i g i t a l i z a t i o n 、 h o mmi z a t i o n r e q u i r e me n t s t O t h e t r e a d mi l l c o n t r o l s y s t e m, a n o v e l p u t f o r wa r d a i n t e l l i g e n t t r e a d mi l l c o n t r o l s y s t e m b a s e d o n S TM 3 2 mi c r o — c o n t r o l l e r . Th e s y s t e m h a s f u n c t i o n o f c o n t r o l l i n g t h e s p e e d o f t r e a d mi l l 、 s t a t e o f mo t i o n a n d s o me b a s i c s t a t e s t e a d i l y , h u t a l s o h a s i n t e l l i g e n t f u n c t i o n s u c h a s v o i c e c o n t r o l 、 v o i c e p l a y i n g、 LC D d i s p l a y i n g、 e n e r g y s a v i n g c o n t r o l a n d S O O n . Th e h a r d wa r e o f s y s t e m g i v e s h a r d wa r e s t r u c t u r e d i a g r a m a n d b r i e f l y i n t r o d u c e s S TM 3 2 mi c r o — c o n t r o l l e r 、 p o we r c i r c u i t 、 f e e d b a c k c i r c u i t , a n d s p e c i f i e s s p e e d
基于stm32和tmc5160的步进电机控制系统

关键词 :STM32F103VCT6 ;TMC5160 ;步进电机 ;DMX512 通信
中图分类号:TM383.6;TP273
文献标志码:A
DOI:10.3969/j.issn.1671-1041.2020.02.017 文章编号:1671-1041(2020)02-0063-04
Stepper Motor Control System Based on STM32 and TMC5160
Key words:STM32F103VCT6;TMC5160;stepper motor;DMX512 protocol
步 进 电 机 因 为 其 结 构 简 单、 控 制 方 式 容 易、 定 位 精 度高等优点,在各控制领域中广泛应用。随着生产自动化 要求的不断提高,步进电机的控制需求与日俱增,驱动方 式也已经非常成熟,在舞台灯光的控制系统中,对于步进 电机的远程控制也成为一种趋势。本文主要研究的是基于 STM32F103VCT6 单片机和 TMC5160 电机驱动芯片,应用 于舞台灯光等控制系统中,是可通过 DMX512 通信协议远 程控制的低成本,高可靠性的步进电机控制系统。
1 系统构成
本文中的步进电机控制系统的主控制芯片选用 STM32 系 列 的 STM32F103VCT6 单 片 机, 电 机 驱 动 芯 片 选 用 Trinamic 公司 2018 年新推出的 TMC5160。
STM32F103 系列单片机是意法半导体公司(ST)推出 的基于 ARM Cortex-M3 内核的 32 位处理器芯片,是一款 高性价比、速度快、效率高、外设功能丰富的单片机。
Zhang Jing1,Fan Yanyan1,Li Yong2 (1.China Nuclear Power Engineering Co.,Ltd.,Beijing,100840,China; 2.China Nuclear Control System Engineering Co.,Ltd.,Beijing,102401,China)
stm32驱动电机的工作原理

stm32驱动电机的工作原理一、引言电机作为现代工业中不可或缺的设备之一,其驱动方式多种多样,其中一种常见的驱动方式是使用stm32单片机来驱动电机。
本文将详细介绍stm32驱动电机的工作原理。
二、stm32驱动电机的基本原理stm32单片机作为一种高性能、低功耗的微控制器,具有丰富的外设和强大的计算能力。
在驱动电机时,stm32通过引脚控制电机的正反转、速度和位置等参数。
具体的工作原理如下:1. 电机的正反转控制stm32通过控制引脚的电平可以实现电机的正反转。
通过将引脚设置为高电平或低电平,可以改变电机的转向。
通常情况下,将引脚设置为高电平表示正转,低电平表示反转。
2. 电机的速度控制stm32通过PWM(脉冲宽度调制)信号可以实现对电机速度的控制。
通过改变PWM信号的占空比,可以调整电机的转速。
占空比越大,电机转速越快;占空比越小,电机转速越慢。
3. 电机的位置控制stm32可以通过编码器等传感器获取电机的位置信息,并根据设定的目标位置来控制电机的运动。
通过不断地检测电机的位置,并进行反馈控制,stm32可以精准地控制电机的运动,实现各种复杂的运动轨迹。
三、stm32驱动电机的具体实现步骤stm32驱动电机的具体实现步骤如下:1. 初始化引脚和外设需要初始化stm32的GPIO引脚和定时器等外设。
GPIO引脚用来控制电机的正反转,定时器用来生成PWM信号。
2. 设置引脚电平根据所需的转向,设置GPIO引脚的电平。
通过改变引脚的输出电平,可以实现电机的正反转。
3. 设置PWM信号根据所需的转速,设置定时器的计数值和占空比。
通过改变计数值和占空比,可以实现不同的转速控制。
4. 控制电机运动根据需要控制电机的位置,可以通过编码器等传感器获取电机的实际位置,并与目标位置进行比较。
根据比较结果,调整PWM信号和引脚电平,控制电机的运动,使其逐渐接近目标位置。
四、总结通过stm32驱动电机的工作原理可以看出,stm32单片机作为一种强大的微控制器,具有丰富的外设和灵活的控制方式,可以实现对电机的精确控制。
采用STM32控制L6470步进电机驱动器
采用STM32控制L6470步进电机驱动器【摘要】常用的步进电机控制器,根据不同的运动方式需要由单片机发出不同频率的和数目的脉冲信号到专用控制芯片,而ST公司的数字控制电机驱动芯片L6470内部数字控制系统可实现完备的运动曲线控制方案,只需要使用单片机发出命令告诉它要怎样运动即可,简化了电路和程序。
【关键词】数字控制内核;微步;STM32;SPI接口步进电机是将电脉冲信号变为电机角位移的或机电执行元件,步进驱动器接收到一个脉冲,电机旋转一个固定的角度,非常适合单片机控制,因此可以用单片机控制脉冲的数量来控制电机的旋转角度,控制脉冲的频率来控制电机的旋转速度,而改变电机电流的方向可以改变电机的旋转方向。
ST公司的L6470省去了单片机的这些工作,单片机只要通过命令告诉L6470以什么样的速度运行到什么位置停止,电机就会在L6470数字内核的控制下按指定方式运行,这些只要发送一个函数命令即可,剩下的就交给L6470去完成。
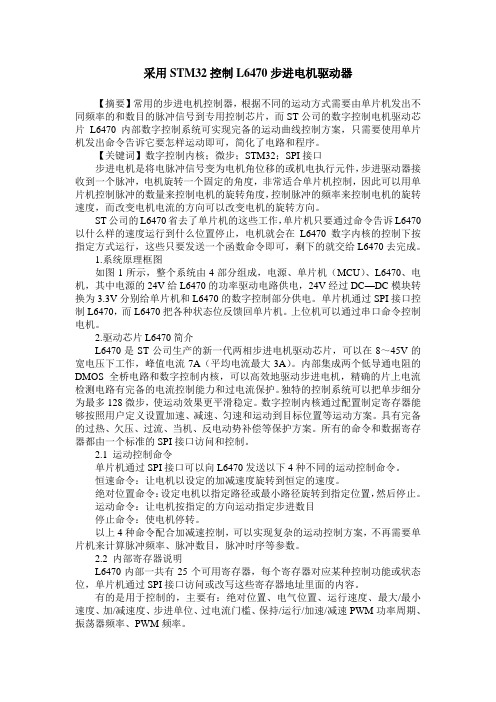
1.系统原理框图如图1所示,整个系统由4部分组成,电源、单片机(MCU)、L6470、电机,其中电源的24V给L6470的功率驱动电路供电,24V经过DC—DC模块转换为3.3V分别给单片机和L6470的数字控制部分供电。
单片机通过SPI接口控制L6470,而L6470把各种状态位反馈回单片机。
上位机可以通过串口命令控制电机。
2.驱动芯片L6470简介L6470是ST公司生产的新一代两相步进电机驱动芯片,可以在8~45V的宽电压下工作,峰值电流7A(平均电流最大3A)。
内部集成两个低导通电阻的DMOS全桥电路和数字控制内核,可以高效地驱动步进电机,精确的片上电流检测电路有完备的电流控制能力和过电流保护。
独特的控制系统可以把单步细分为最多128微步,使运动效果更平滑稳定。
数字控制内核通过配置制定寄存器能够按照用户定义设置加速、减速、匀速和运动到目标位置等运动方案。
具有完备的过热、欠压、过流、当机、反电动势补偿等保护方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
论文作者签名: 指导教师签名:
日期: 日期:
年 年
月 月
日 日
杭州电子科技大学硕士学位论文
基于 CAN-BUS 和 STM32 的智能步进电机 驱动控制模块设计
研 究 生: 马丹丹 指导教师: 张文超 教授
2013 年 2 月
Dissertation Submitted to Hangzhou Dianzi University for the Degree of Master
I
杭州电子科技大学硕士学位论文
ABSTRACT
The stepper motor with open-loop control, no accumulated error, accurate positioning, plays an important role in the automation and control systems. Instrument with a precision positioning system, the stepper motor is increasingly showing its excellent features. With the development of the national economy, the multi-stepper motor drive control system is the current mainstream applications, while a system of machine performance is closely related to the quality of its pros and cons of the drive control architecture mode. Therefore, it is very necessary to research and explore multiple stepper motor application architecture. The traditional control of stepper motor driver architecture adopts centralized concurrency control mode, there is a lack of real - time and poor , new stepper motor application architecture is proposed for the status quo - serial distributed control architecture . The text distributed intelligent stepper motor drive control system design based on the STM32 series chip and CAN bus , serial distributed control architecture with outstanding reliability , flexibility , real-time , compared with the traditional centralized parallel control architecture . This paper has carried on the related to stepper motor, and combined with subdivided driving technology, for instruments and meters, etc of stepper motor applications, designed a distributed intelligent drive control system. Mainly includes the upper machine under the control management interface to write, a main node, the child node hardware design and the realization of CAN communication. Lower machine through the RS232 serial port and PC communications, as research is convenient, PC is adopted to be as the superior machine. On the PC side, the control software programmed in LabWindows/CVI, can be used to control the operation of the various nodes,set run or stop、forward or inversion、the steps、subdivided level,etc. Lower machine each node can communication through CAN bus in a timely manner, and each node has the intelligence, the master node send only a command, a specific control can be performed by independent child nodes. Each node of main controller adopts the high performance and low power consumption STM32F103ZET6 chip, child nodes motor driver module selects the THB7128 high subdivision for two phase hybrid stepping motor driver chip, subdivided level can up to 128, the system will become perfect with the improve of stepper motor positioning accuracy. The system has over current protection, short circuit protection, and other functions. The purpose of this article is to develop a set of superior performance, easy operation, simple structure, good commonality distributed intelligent stepper motor drive control module.
杭州电子科技大学硕士学位论文
摘
要
步进电机具有可开环控制、无累积误差、精确定位等特性,在自动化控制领域起着 举足轻重的作用。在仪用精密定位系统中,步进电机愈加显示出其优异特性。随着国民 经济的发展,多步进电机的驱动控制系统是目前的主流应用,而一个系统整机性能的好 坏与其驱动控制架构模式的优劣密切相关。因此,对多个步进电机的应用架构进行研究 和探讨是十分必要的。 传统的步进电机驱动架构多采用集中并行式控制模式,存在实时性差等不足,本文 针对此现状提出了新的步进电机应用架构——分布串行式控制架构。文中基于 STM32 系列芯片和 CAN 总线设计了分布式智能步进电机驱动控制系统,与传统集中并行式控 制架构相比,分布串行式控制架构具有可靠性高、灵活性好、实时性强的突出特点。 本文对步进电机进行了相关介绍,并结合其细分驱动技术,针对仪器仪表等多步进 电机的应用场合,设计了分布式智能电机驱动控制系统。主要包括上位机控制管理界面 的编写、下位机主节点、子节点硬件设计以及 CAN 通信的实现。下位机通过 RS232 串 口与上位机通讯,为研究方便,选取 PC 机为上位机。采用 LabWindows/CVI 编写上位 机控制界面,可控制各个节点的运行,对各节点步进电机的启停、正反转、步数、细分 数等进行控制。下位机各节点通过 CAN 总线实现及时地通信,且各个子节点具有智能 性,主节点只需发送命令,具体控制可由子节点独立完成。各节点主控制器均采用高性 能、低功耗的 STM32F103ZET6 芯片,子节点电机驱动模块选用 THB7128 高细分两相 混合式步进电机专用驱动芯片,细分数最高可达 128,步进电机定位精度的提高使得系 统整机性能得以完善。系统具有过流保护、短路保护等功能。 本文的目的是开发一套性能优越、操作易行、结构合理、通用性好的分布式智能步 进电机驱动控制模块。测试结果表明:该系统可以达到预设指标。系统运行性能优良、 可靠、稳定、灵活,系统驱动电流可调,适用于驱动 28 系列、42 系列、57 系列等多种 型号的中小功率两相混合式步进电机,具有很好的研究和应用价值以及广阔的市场前 景。 关键词:步进电机,细分驱动,分布串行式,STM32,CAN,LabWindows/CVI
The Design of Intelligent Stepper Motor Drive Control Module Based on CAN-BUS and STM32 MCU
Candidate: Ma Dandan Supervisor: Prof. Zhang Wenchao
February,2013
硕
士
学
位
论
文
题
目: 基于 CAN-BUS 和 STM32 的智能步进电机 驱动控制模块设计
研 究 生 专 业
马 丹 丹 电 路 与 系 统 张 文 超 教 授
指导教师
完成日期
2013 年 2 月
杭州电子科技大学 学位交的学位论文,是本人在导师的指导下,独立进行研究工作所 取得的成果。除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表 或撰写过的作品或成果。对本文的研究做出重要贡献的个人和集体,均已在文中以明确 方式标明。 申请学位论文与资料若有不实之处,本人承担一切相关责任。