MSP430单片机对步进电机的驱动控制设计
用MSP430F149单片机实现步进电机通用控制器
霪 娶毋 r 蕈
- 0 0
0妻 嚣 j
关键词 :M S
单片机 ;步进 电机 ; 通用控制器
0 il l ≮
一I 嚣露 零 l。 l l 譬≯ l
系 统 设 计
系统 结构 本控 制 器 主要 实 现 了 多台 步进 电机 在 多段 曲线 上 的
\
\
,
技 术
,
i
一 一
f 放大的起动过程
运行曲线
…
用 机实现 单片 步进电 加/速控制, 际上 机的 减 实 就是
控制 发脉 冲的频 率 , 升速 时 , 使脉 冲频 率 增高 , 速时 相 减
反。 如果 使 用定 时 中断 来 控制 电机 的速 度 , 加减 速控 制 就
图4连续 模式的定 时间隔输 出
积小 、可 靠 性 高 。
一般不小于 5 s、脉冲序列的均匀度及高低电平方式 。 g)
7r甘 . 击 ] th : ‘ 吉 S , r 士 r , 企 I L 壬 7 7 陂 、 击 士
向一升 速 三 个过 程 。
步进 电机起动及加 / 减速控制方案
‘
…
脉
U
t l e .
r -
算是在定时中断外实现的, 并不 占用中断时间 , 保证电机
u
前D 硝 勺 I 最  ̄ c t; -P  ̄, .
-
后 /
\ D勺 -硝i 下- ̄  ̄t I第 c. P,
此时D l 向 II 换
的高速运行。
②证制度精性要一速准达 保控速的确;从个度确到
方 向 DR I
步 进 电 动 机 的 最 高 起 动 频 率 ( 跳 频 率 ) 般 为 突 一
MSP430单片机_步进电机与直流电机控制设计
//选择使用采样定时器, 转换模式选择-序列通道多次转换模式
ADC12CTL1 = ADC12SHP+ADC12CONSEQ_3
ADC12MCTL3 = ADC12INCH_7 ;
//选择模拟输入通道
ADC12IE = BIT7;
// 中断使能 ADC12IFG.5
ADC12CTL0 |= ADC12ENC;
步进电机
2电路实现--- 连接示意图
直流电机
2电路实现---IO设置
通过DRV8833控制直流电机不步进电机
5V电压通过1N5819整流为DRV8833提供工作电压
MSP430F6638端口P1.1,P1.4,P1.7,P3.1作为
DRV8833的xIN输入端口;
VDD_5V
D7 1N5819 DC_5V
步进电机运行方向IO给电顺序
3代码实现--- 功能列表
步进电机
控制换相顺序: 通电换相这一个过程称为脉冲分 配;
控制步进电动机的转向:正转,反转;
控制步进电动机的速度:给步进电机一个脉冲, 就转一步;再发一个脉冲,会再转一步;两个脉冲 的间隔时间越短,步进电动机就转得越快;调整发 出的脉冲频率,就可以对步进电机进行调速; 脉 冲的频率决定了电机的转速。
1实现原理---步进电机
三相式步进电机内部结构
1实现原理---步进电机
概念 步进电机旋转的根本原因 错齿 术语 齿距角:齿之间的距离 步距角: 转子走一步所转过的角度 失步:转子的转速慢于换相速度则会引起失步 振荡:转子在电磁力的作用下在平衡点左右振 荡 拍:对绕组通电一次的操作称为一拍 对齿 错齿
}
4代码分析--- 直流电机
直流电机运行
基于MSP430实现的步进电机控制
作品概述MSP430G2 系列 Launchpad 是TI 推出的一款低成本的开辟平台。
它合用于适 用于 TI 最新 MSP430G2xx 系列产品, 其基于 USB 的集成型仿真器可提供为全系 列 MSP430G2xx 器件开辟应用所必需的所有软、硬件。
本作品选择 MSP430G2231 为 Launchpad 核心板的单片机, 采用 Launchpad 核心板加底板的形式, 实现了对 步进机电的四相四拍和四相八拍控制, 并实现了转动方向和转动速度的控制, 并 且用数码管显示转动方向和转动速度的百分比。
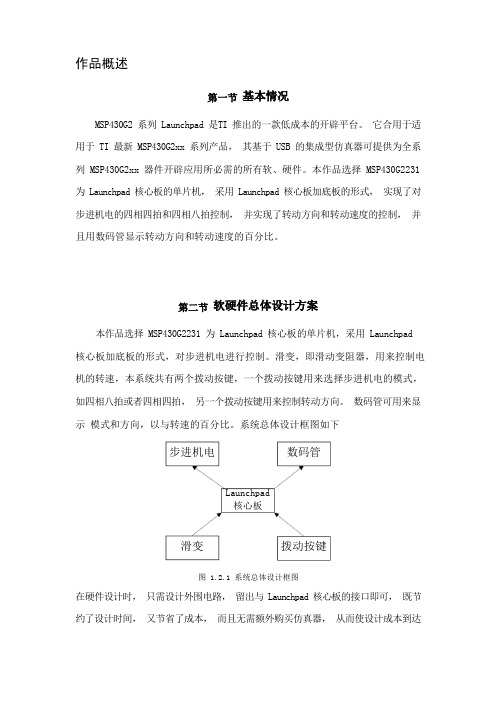
本作品选择 MSP430G2231 为 Launchpad 核心板的单片机,采用 Launchpad 核心板加底板的形式,对步进机电进行控制。
滑变,即滑动变阻器,用来控制电 机的转速,本系统共有两个拨动按键,一个拨动按键用来选择步进机电的模式, 如四相八拍或者四相四拍, 另一个拨动按键用来控制转动方向。
数码管可用来显示 模式和方向,以与转速的百分比。
系统总体设计框图如下图 1.2.1 系统总体设计框图在硬件设计时, 只需设计外围电路, 留出与 Launchpad 核心板的接口即可, 既节 约了设计时间, 又节省了成本, 而且无需额外购买仿真器, 从而使设计成本到达数码管Launchpad 核心板拨动按键步进机电滑变.最低。
在软件设计方面,可充分利用 G2 系列单片机的各个功能模块,如时钟系统、TA 定时器、 ADC10 模数转换器,看门狗,以与IO 口中断等资源,设计出高效率、低功耗、结构紧凑而又功能强大的产品。
第一章作品硬件系统设计MSP430G2 系列 Launchpad 是TI 推出的一款低成本的开辟平台。
它合用于适用于 TI 最新 MSP430G2xx 系列产品,其基于 USB 的集成型仿真器可提供为全系列 MSP430G2xx 器件开辟应用所必需的所有软、硬件。
LaunchPad 具有集成的 DIP 目标插座,可支持多达 20 个引脚,从而使 MSP430 Value Line 器件能够简便地插入 LaunchPad 电路板中。
基于MSP430的步进电机实验-IO口控制
1、实现步进电机开启、停止;
2、
3、实现步进电机正转、反转;;
4、实现步进电机调速。
三、实验原理:
1、步进电机控制原理:
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。其基本原理作用如下:
Speed_Update();
delay(m);
P3OUT=BIT2+BIT3;
Speed_Update();
delay(m);
a=P1IN&0X10;//更新转向控制值
b=P1IN&0X20;//更新启动控制值
}
}
else if((a!=0x10)&&(b==0X20))//反转时序
{
while((a!=0x10)&&(b==0X20))
(1)控制换相顺序即各个控制线通电顺序,这一过程称为脉冲分配。给步进电机一列脉冲并循环下去,那么步进电机会不停地转动。
(2)控制步进电机的转向,如果给定工作方式正序换相通电,步进电机正转;如果按反序通电换相,则电机就反转。
(3)控制步进电机的速度,如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。两个脉冲的间隔越短,步进电机就转得越快。调整单片机发出的脉冲频率,就可以对步进电机进行调速。
{
while(tim--);
}
void Speed_Update(void)//延时选择子函数
基于MSP430F449单片机的24BYJ48步进电机控制

1 4
鄂
州
大
学
学
报
第 l 8卷
步 进 电机 控 制 系 统 主 要 是 由步 进 控 制器 、 功 率 放大 器及 步 进 电机 组成 。步进 控 制器 是 由缓 冲
从 图 中可 以 看 出 , 冲 是 用周 期 、 冲 高 度 、 脉 脉 接 通与 断开 电源 的时 间来 表示 的 。脉 冲 幅值 由数
感应 子 式 ( 混合 式 ) Y B G步 进 电机 。根据 励 磁 绕组 的相 数分 主要 有单 相 、 三相 、 四相 和五相 等多 种【 l 】 。 当步进 驱 动 器接 收 到一 个脉 冲信 号 ,它 就驱 动 步 进 电机 按 设 定 的方 向转 动一 个 固定 的 角 度
( 为“ 称 步距 角 ” , 距 角 的大小 反 映 了 步进 电机 ) 步
转 . 么 当通 电顺 序 按A—C + — A 行 时 , 电 那 .B 进 则
步进 电机 是一 种将 电 脉 冲转化 为 角位 移 的 执 行机 构 。角位 移与 脉 冲数 成 正 比 , 速 与脉 冲频 率 转 成正 比 。因此 可通过 改 变脉 冲频 率 实现 步 进 电机
调速。
B B — —B — C
C C A。反 转 通 电顺 序 为 A + C ÷ — C 一 A _ A _C B 十
1 . 2步进 电机控 制 系统原 理 典 型步进 电机 控制 系统 如 图l 所示 [ 2 1 。
脉冲
阻式 ( 应式 B ) 进 电机 、 磁式 步进 电机B 反 F步 永 Y和
字 元件 电平 决 定 。接通 和 断开 时 间可 用延 时 的办
寄存 器 、 环形 分 配 器 、 制 逻辑 及 正 、 控 反转 向控 制 门等组 成 。它 的作 用 就是 把 输 入脉 冲转 换 成环 型 脉冲 ,以便控 制 步进 电机 ,并 能进 行 正反 向的控 制 。功 率 放大 器 的作 用是 把 控 制器输 出 的环型 脉 冲加 以放 大 , 以驱动 步进 电机转 动 。在这 种控 制方 式 中 , 于步 进 控 制 器 线 路 复杂 、 本 高 , 由 成 因而 限 制 了它 的使 用 。 是 如果 采用 单片机 控制 系统 。 但 由 软 件代替 上述 步 进控 制器 , 问题将 大大 简化 。这 则
基于MSP430单片机的步进电机控制系统设计

基于MSP430单片机的步进电机控制系统设计步进电机是一种电动机,能够将电脉冲信号转换为机械转动。
它具有结构简单、运行平稳、响应速度快、定位精度高等特点,广泛应用于各种机械设备中。
本文主要介绍基于MSP430单片机的步进电机控制系统的设计。
1.系统硬件设计步进电机控制系统的硬件设计需要包括MSP430单片机、步进电机、电源以及其他辅助电路。
1.1MSP430单片机MSP430系列是由德州仪器公司推出的一款低功耗、高性能的16位单片机。
它具有低功耗、高计算性能、丰富的接口资源等特点,非常适合用于步进电机控制系统。
1.2步进电机步进电机是由转子、定子、绕组和传感器组成,可以完成定距离的转动。
根据具体需求,可以选择不同类型的步进电机,如单相、双相、两相、三相等。
1.3电源步进电机控制系统需要提供稳定的电源供电。
可以采用直流电源或者交流电源,具体电压和电流根据步进电机的额定参数确定。
1.4辅助电路辅助电路包括电机驱动电路、电流控制电路、保护电路等。
电机驱动电路可以选择使用驱动芯片,如L293D芯片,来驱动步进电机。
电流控制电路用于控制步进电机的电流大小,保护电路用于保护步进电机不受过电流、过压等问题的影响。
2.系统软件设计步进电机控制系统的软件设计需要编写相应的程序代码,并通过MSP430单片机来控制步进电机的运动。
2.1硬件初始化在软件设计开始之前,需要对MSP430单片机的相关硬件进行初始化设置。
包括设置时钟源、引脚功能、定时器等。
根据具体的单片机型号,可以参考官方提供的资源来进行初始化设置。
2.2电机控制算法步进电机的控制主要通过控制电流脉冲来实现。
根据步进电机的型号和控制要求,可以选择不同的控制算法,如单相步进、双相步进或者微步控制等。
通过控制电流脉冲的频率、信号大小来控制步进电机的转动方向以及速度。
2.3交互界面设计可以通过开发板上的按键、液晶显示屏、串口等方式,设计一个交互界面,用于用户输入控制命令、设置参数以及显示系统状态等。
基于MSP430单片机的步进电机控制器的设计与实现

基于MSP430单片机的步进电机控制器的设计与实现步进电机是一种常见的电动机类型,它通过以固定的步进角度运动来驱动机械装置。
MSP430单片机是一种低功耗、高性能的微控制器,适合用于步进电机控制器的设计与实现。
本文将介绍基于MSP430单片机的步进电机控制器的设计与实现方法。
首先,我们需要了解步进电机的原理和工作方式。
步进电机的转动是通过控制电流的方向和大小来实现的。
根据步进电机的类型和设计参数,我们可以确定所需的控制电流和相位方式。
常见的步进电机类型有单相和双相两种,其中双相步进电机是最常见的。
接下来,我们需要确定MSP430单片机的引脚分配。
通常,步进电机的驱动信号需要4个引脚来控制,分别是两个控制电流的引脚(A+和A-)和两个控制电流的引脚(B+和B-)。
根据MSP430单片机的引脚数量和功能,我们可以选择适当的引脚来连接步进电机。
设计步进电机控制器的核心是编写控制算法。
在MSP430单片机上,我们可以使用C语言或汇编语言编写程序来控制步进电机的转动。
下面是一个简单的C语言程序示例:```c#include <msp430.h>#define APlus BIT0 // P1.0对应步进电机A+引脚#define AMinus BIT1 // P1.1对应步进电机A-引脚#define BPlus BIT2 // P1.2对应步进电机B+引脚#define BMinus BIT3 // P1.3对应步进电机B-引脚void delay(unsigned int ms) //延时函数unsigned int i, j;for (i = 0; i < ms; i++)for (j = 0; j < 110; j++);void main(void)WDTCTL=WDTPW,WDTHOLD;//停止看门狗定时器P1DIR = APlus , AMinus , BPlus , BMinus; // 设置引脚为输出模式while (1)P1OUT = APlus , BPlus; // 设置两个控制电流引脚为高电平delay(500);P1OUT = AMinus , BPlus; // 设置两个控制电流引脚为高低电平delay(500);P1OUT = AMinus , BMinus; // 设置两个控制电流引脚为低电平delay(500);P1OUT = APlus , BMinus; // 设置两个控制电流引脚为高电平低电平delay(500);}```以上程序实现了一个简单的步进电机控制器。
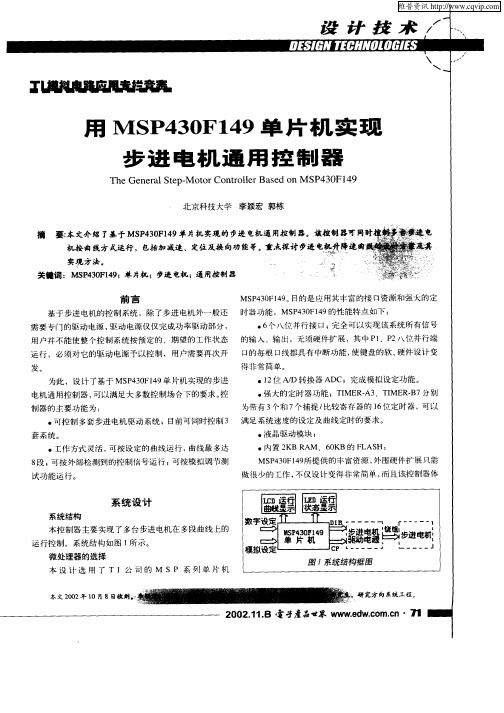
用MSP430F149单片机实现步进电机通用控制器
用MSP430F149单片机实现步进电机通用控制器1.前言基于步进电机的控制系统,除了步进电机一般还需要专门的驱动电源,驱动电源仅仅完成功率驱动部分,用户并不能使整个控制系统按预定的、期望的工作状态运行,必须对它的驱动电源予以控制,用户需要再次开发。
鉴于此,设计了基于MSP430F149单片机实现的步进电机通用控制器,可以满足大多数控制场合下的要求。
控制器的主要功能为:①可控制多套步进电机驱动系统;目前可同时控制3套系统。
②工作方式灵活,可按设定的曲线运行,曲线最多达8段;可按外部检测到的控制信号运行;可按模拟调节测试功能运行;2.系统的设计 2.1系统的结构本控制器主要实现了多台步进电机在多段曲线上的运行控制。
系统结构如图1所示。
2.2微处理器的选择本设计选用了TI公司所生产的MSP系列单片机MSP430F149。
目的是应用其丰富的接口资源和强大的定时器功能,MSP430F149的性能特点如下:①6个八位并行接口;完全可以实现该系统所有信号的输入、输出,无须硬件扩展,其中P1、P2八位并行端口的每根口线都具有中断功能,使键盘的软、硬件设计变的非常简单。
②12位A/D转换器ADC;完成模拟设定功能。
③强大的定时器功能;TIMER-A3、TIMER-B7分别为带有3个和7个捕捉/比较寄存器的16位定时器,可以满足系统速度的设定及曲线定时的要求。
④液晶驱动模块;⑤内置2KB RAM、60KB的FLASH;MSP430F149所提供的丰富资源,外围硬件扩展只需做很少的工作,不仅设计变得非常简单,而且该控制器体积小、可靠性高。
2.3步进电机起动及加/减速控制方案步进电动机的最高起动频率(突跳频率)一般为0.1KHz 到3-4KHz,而最高运行频率则可以达到N*102 KHz。
以超过最高起动频率的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MSP430单片机对步进电机的驱动控制设计
单片机实现的步进电机控制系统具有成本低、使用灵活的特点,广泛应用于数控机床、机器人,定量进给、工业自动控制以及各种可控的有定位要求的机械工具等应用领域。
步进电机是数字控制电机,将脉冲信号转换成角位移,电机的转速、停止的位置取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,非超载状态下,根据上述线性关系,再加上步进电机只有周期性误差而无累积误差,因此步进电机适用于单片机控制。
步进电机通过输入脉冲信号进行控制,即电机的总转动角度由输入脉冲总数决定,而电机的转速由脉冲信号频率决定。
步进电机的驱动电路是根据单片机产生的控制信号进行工作。
因此,单片机通过向步进电机驱动电路发送控制信号就能实现对步进电机的控制。
1 系统设计原理
步进电机控制系统主要由单片机、键盘LED、驱动/放大和PC上位机等4个模块组成,其中PC机模块是软件控制部分,该控制系统可实现的功能:1)通过键盘启动/暂停步进电机、设置步进电机的转速和改变步进电机的转向;2)通过LED管显示步进的转速和转向等工作状态;3)实现三相或四相步进电机的控制:4)通过PC上位机实现对步进电机的控制(启停、转速和转向等)。
为保护单片机控制系统硬件电路,在单片机和步进电机之间增加过流保护电路。
图l为步进电机控制系统框图。
2 系统硬件电路设计
2.1 单片机模块
单片机模块主要由MSP430FG4618单片机及外围滤波、电源管理和晶振等电路组成。
MSP430FG4618单片机内部的8 KB RAM和116 KB Flash满足控制系统的存储要求,P1和P2端口在步进电机工作过程中根据按键状态判断是否跳入中断服务程序来改变步进电机的工作状态,USART模块实现单片机和PC上位机之间的通信,实现PC机对步进电机控制。
电源管理电路提供稳定的3.3 V和5 V电压,分别给单片机、晶振电路和驱动和功率放大电路供电。
32 kHz晶振给单片机、键盘/显示接口器件8279和脉冲分配器。