步进电机驱动器控制信号接口说明
3MA22100 步进电机驱动器使用手册说明书

3MA22100(三相高压)细分步进驱动器使用手册Version1.0版权所有 不得翻印【使用前请仔细阅读本手册,以免损坏驱动器】宁波纳川自动化科技有限公司3MA22100步进电机驱动器使用说明 在使用本品前,请仔细阅读本使用说明书请妥善保管本说明书,以备日后参考本册外观图片仅供参考,请以实物为准安全注意事项请勿带电插拔连接线缆。
此产品非密封,请勿在内部混入镙丝、金属屑等导电性异物或可燃性异物,储存和使用时请注意防潮防湿。
驱动器为功率设备,尽量保持工作环境的散热通风。
在连上步进电机,调节好电流后使其连续工作半小时后观察步进电机是否在额定温度后方可进行后续使用,如果电机温度过高请联系制造商。
一、产品简介1.1 产品概述3MA22100是纳川科技最新推出的一款采用精密电流控制技术设计的高细分步进电机驱动器,适合驱动110-130型各种品牌的三相混合式步进电机。
由于采用了先进的抗噪声控制方法,能大幅度降低电机运转时的噪声和振动,使得步进电机运转时的噪声和平稳性趋近于伺服电机的水平。
和市场上的大多数其他细分驱动产品相比,步进电机和驱动器的发热量降幅达15-30%。
1.2 产品特点⏹高性能、低价格、超低噪声⏹电机和驱动器发热极低⏹供电电压AC110-250V⏹输出电流峰值可达8.3A(均值5.86A)⏹输入电信号TTL兼容(5V兼容)⏹静止时电流自动减半⏹可驱动三相混合式步进电机⏹高速光耦隔离信号输入,脉冲响应频率最高可达100KHz⏹抗高频干扰能力强⏹输出电流设定方便⏹有过压、欠压、过流、过热、相间短路保护功能1.2 应用领域适合各种大型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图仪、数控机床、拿放装置等。
在用户期望低成本、小噪声、高速度的设备中效果特佳。
二、电气、机械和环境指标2.1 电气指标说明 3MA22100最小值 典型值 最大值 单位 输出电流 3.3(均值2.34)- 10(均值7.11) A 输入电源电压 110 180 250(含纹波)VAC 逻辑输入电流 7 10 16 mA 步进脉冲频率 0 - 40 KHZ 绝缘电阻500MΩ2.2 使用环境及参数冷却方式自然冷却使用环境场合 尽量避免粉尘、油雾及腐蚀性气体环境温度0℃-+50℃ 最高工作温度70℃湿度 40-90% RH9 (不能结露和有水珠)震动 5.9m/S2 Max 保存温度 -20℃-125℃ 重量约1500克2.3 机械安装图 单位:毫米2.4 加强散热方式(1)驱动器的可靠工作温度通常在65℃以内,电机的工作温度在80℃以内;(2)安装驱动器时请采用竖着侧面安装,形成较强的空气对流,必要时机内靠近驱动器出安装风扇,强制散热,保证驱动器在可靠的工作温度范围内工作。
MS3540MI 步进电机驱动器说明书

MS3540MI步进电机驱动器使用手册MS3540MI步进电机驱动器使用手册1. 产品简介1.1 概述MS3540MI为智能型双极细分型步进电机驱动器。
该驱动器集成了运动控制功能,可使用Mis可编程软件通过RS232接口下载程序;也可使用SCL语言通过PC、PLC或MCU实现对驱动器及电机的实时控制。
驱动器上的可编程的输入、输出接口用于和外部开关、传感器等其它元件进行同步,在简单的运动控制中可将该驱动器作为控制器使用,减少了系统元件的数量,降低了系统集成的复杂度和成本。
1.2 特点•12-42V 直流电压供电•0.2-3.5A 相电流(峰值),通过软件配置•自动减流功能,通过软件配置•13 种细分选择,通过软件配置••8 个可编程的光电隔离输入信号端口3 个可编程的光电隔离输出信号端口MS3540MI步进电机驱动器使用手册电机•驱动器•齿轮箱•开关电源- 1 - •双极性PWM 恒流斩波控制,开关频率20-30kHz•人机交互界面(MSMMI)配件可选•利用Mis 编程软件方便地对驱动器进行编程,使其独立实现运动控制功能•利用SCL 驱动器编程语言,可以实现驱动器与PC、PLC 或MCU 的连接,以对驱动器进行实时控制操作•通过Mis 网络集线器可以使驱动器与其它的Mis 系列驱动器进行网络互连,实现- 2 -MS3540MI步进电机驱动器使用手册一台主机同时控制多台驱动器的功能输入输出2. 功能框图MS3540MI步进电机驱动器使用手册5-24V 信号,光电隔离输入。
2200ohms 内部电阻。
(可采用下拉(NPN)或上拉(PNP)控制信号电路)光电隔离。
光敏三极管C、E 间最大电压24V,最大输出电流100 mA。
细分13 种细分选择可通过软件配置。
如采用 1.8˚电机,则每圈转动步数:2000, 5000, 10000, 12800, 18000, 20000, 21600,25000,25400, 25600, 36000, 50000, 50800.运动刷新频率12800Hz.物理特性装在黑色阳极氧化的铝散热底盘上。
YKA2608MC步进电机驱动器使用说明书

YKA2608MC/ YKA2608MD 细分驱动器特点◆高性能、低价格◆设有12/8档等角度恒力矩细分,最高200细分,使运转平滑,分辨率提高◆采用独特的控制电路,有效的降低了噪音,增加了转动平稳性◆最高反应频率可达200Kpps◆步进脉冲停止超过100ms时,线圈电流自动减半,减小了许多场合的电机过热◆双极恒流斩波方式,使得相同的电机可以输出更大的速度和功率◆光电隔离信号输入/输出◆驱动电流从0.0A/相到6.0A/相连续可调◆可以驱动任何6.0A相电流以下两相混合式步进电机◆单电源输入,电压范围:DC24-80V◆出错保护:――过热保护――过流、电压过低保护◆体积小巧YKA2608MC(D)是一款经济、小巧的步进驱动器,体积为45x136x92 mm3。
典型应用雕刻机、激光打标机、激光内雕机概述YKA2608MC(D)是等角度恒力矩细分型高性能步进驱动器,驱动电压DC24-80V,采用单电源供电。
适配6或8出线电流在6.0A以下,外径57-86mm的各种型号的二相混合式步进电机。
该驱动器内部采用双极恒流斩波方式,使电机噪音减小,电机运行更平稳;驱动电源电压的增加使得电机的高速性能和驱动能力大为提高;而步进脉冲停止超过100ms时,线圈电流自动减半,使驱动器的发热可减少50%,也使得电机的发热减少。
用户在脉冲频率不高的时候使用低速高细分,使步进电机运转精度提高,最高可达200细分,振动减小,噪声降低。
电器规格工作电流设定示意图功能设定示意图输入信号波形时序图驱动器信号示意图驱动器接线示意图安装尺寸(单位:mm)采用侧面安装,散热效果较好YKA2608MC细分设定表YKA2608MD细分设定表指示灯和电位器功能说明引脚功能说明!注意:1. 不要将电源接反,输入电压不要超过DC80V。
2. 输入控制信号电平为5V,当高于5V时需要接限流电阻(12V串接510Ω,24V串接1200Ω)。
3. 此型号驱动器采用特殊的控制电路,故必须使用6出线或者8出线电机。
步进电机驱动器--MA860H说明书
MA860H 两相混合式细分驱动器
产品概述
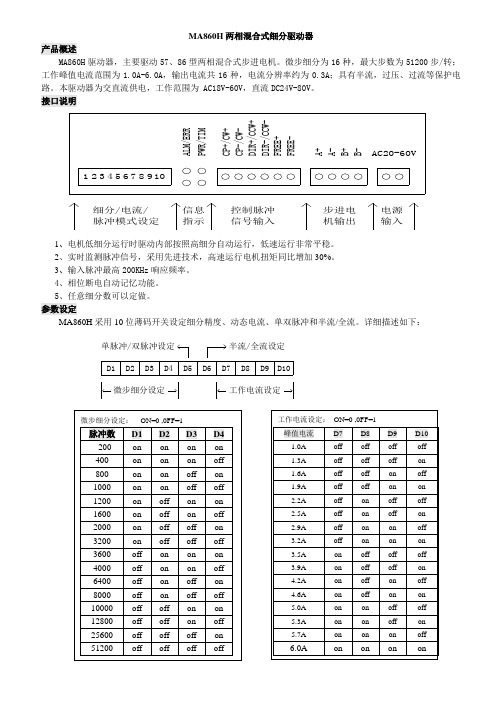
MA860H 驱动器,主要驱动57、86型两相混合式步进电机。
微步细分为16种,最大步数为51200步/转;工作峰值电流范围为1.0A-6.0A ,输出电流共16种,电流分辨率约为0.3A ;具有半流,过压、过流等保护电路。
本驱动器为交直流供电,工作范围为 AC18V-60V ,直流DC24V-80V 。
接口说明
B
+B -9C P -/C W -A +A -D I R -/C C W -F R E E +D I R +/C C W +F R E E -
P W R /T I M
C P +/C W +
10
A
L M
/E R
R 523
487
61AC20-60V
步进电机输出
控制脉冲信号输入电源输入
信息指示细分/电流/脉冲模式设定
1、电机低细分运行时驱动内部按照高细分自动运行,低速运行非常平稳。
2、实时监测脉冲信号,采用先进技术,高速运行电机扭矩同比增加30%。
3、输入脉冲最高200KHz 响应频率。
4、相位断电自动记忆功能。
5、任意细分数可以定做。
参数设定 MA860H 采用10位薄码开关设定细分精度、动态电流、单双脉冲和半流/全流。
详细描述如下:
D1
D2
D3
D4
D5
D6
D7
D8
D9D10
微步细分设定工作电流设定
单脉冲/双脉冲设定半流/全流设定。
步进电机驱动器控制信号接口说明【详】
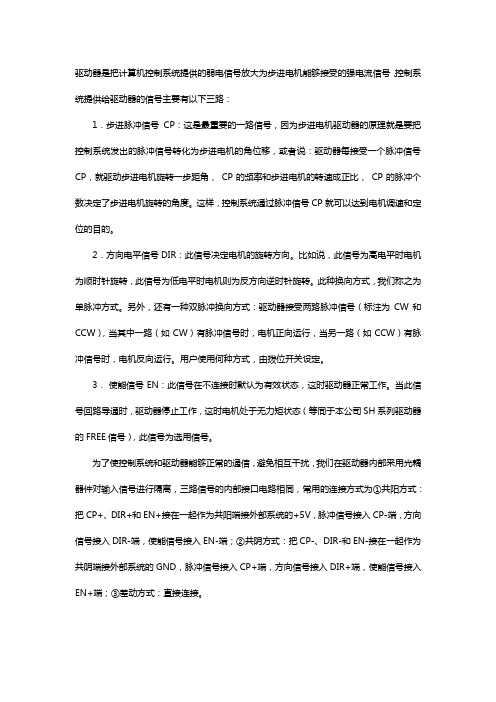
驱动器是把计算机控制系统提供的弱电信号放大为步进电机能够接受的强电流信号,控制系统提供给驱动器的信号主要有以下三路:1.步进脉冲信号CP:这是最重要的一路信号,因为步进电机驱动器的原理就是要把控制系统发出的脉冲信号转化为步进电机的角位移,或者说:驱动器每接受一个脉冲信号CP,就驱动步进电机旋转一步距角,CP的频率和步进电机的转速成正比,CP的脉冲个数决定了步进电机旋转的角度。
这样,控制系统通过脉冲信号CP就可以达到电机调速和定位的目的。
2.方向电平信号DIR:此信号决定电机的旋转方向。
比如说,此信号为高电平时电机为顺时针旋转,此信号为低电平时电机则为反方向逆时针旋转。
此种换向方式,我们称之为单脉冲方式。
另外,还有一种双脉冲换向方式:驱动器接受两路脉冲信号(标注为CW和CCW),当其中一路(如CW)有脉冲信号时,电机正向运行,当另一路(如CCW)有脉冲信号时,电机反向运行。
用户使用何种方式,由拨位开关设定。
3.使能信号EN:此信号在不连接时默认为有效状态,这时驱动器正常工作。
当此信号回路导通时,驱动器停止工作,这时电机处于无力矩状态(等同于本公司SH系列驱动器的FREE信号),此信号为选用信号。
为了使控制系统和驱动器能够正常的通信,避免相互干扰,我们在驱动器内部采用光耦器件对输入信号进行隔离,三路信号的内部接口电路相同,常用的连接方式为①共阳方式:把CP+、DIR+和EN+接在一起作为共阳端接外部系统的+5V,脉冲信号接入CP-端,方向信号接入DIR-端,使能信号接入EN-端;②共阴方式:把CP-、DIR-和EN-接在一起作为共阴端接外部系统的GND,脉冲信号接入CP+端,方向信号接入DIR+端,使能信号接入EN+端;③差动方式:直接连接。
驱动器输入信号内部接口示意图如果驱动器输入信号为电压信号,要求:3.6V≤高电平≤5.5V;-5.5V≤低电平≤0.3V,最常用的为TTL电平。
如果驱动器输入信号为电流信号,要求:7mA≤高电流≤18mA;-18mA≤低电流≤0.2mA。
步进电机的应用—三相混合式步进电机驱动器使用说明书

三相混合式步进电机驱动器使用说明书1.特点★AC80~220V交流供电,能适应恶劣的电网环境★双极恒相流细分驱动★最大输出驱动电流6A/相(有效值,峰值达8A)★最大30000步/转的十六种细分模式可★过压、过流保护★输入信号光电隔离★可适应共阳、共阴、单/双脉冲多种模式★脱机保持功能★提供节能的自动半电流锁定功能2.性能指标供电电源80V~220VAC,容量0.8KVA输出电流有效值6A/相(峰值可达8A)(输出电流可由面板拨码开关设定)驱动方式恒相流PWM控制励磁方式400步/转,500步/转,600步/转,750步/转,1000步/转1500步/转,2000步/转,2500步/转,3000步/转,3750步/转5000步/转,6000步/转,7500步/转,10000步/转,15000步/转30000步/转绝缘电阻在常温常压下>500MΩ绝缘强度在常温常压下1KV,1分钟3.使用环境及参数冷却方式强制风冷使用环境场合尽量避免粉尘、油雾及腐蚀性气体温度0℃~+50℃湿度<80%RH,无凝露,无结霜震动 5.9m/s2Max保存温度-20℃~+65℃外形尺寸187×116×81mm重量 1.3Kg4.功能及使用★电源电压驱动器内部的开关电源设计保证了其可以适应较宽的电压范围,推荐使用80~220VAC,提高电压对提高电机的高速力矩有效,但是同时会加大运行噪音。
由于电机电磁感应回导致电机外壳生出一定的电荷,为确保使用者安全,请务必使用线径2mm2以上的机壳保护线和驱动器的机壳接地端子与保护大地可靠连接,并采用隔离变压器为驱动器供电★输出电流选择本驱动器采用双极恒流方式,最大输出电流值为6A/相(有效值),通过驱动器侧板第7,8四位开关的不同组合可以方便的选择4种电流值,从2A到6A(详见电流选择表),(注意:这里所说的电流是指驱动器每相输出电流的有效值,使用串电流表的方式不能得到正确的读数。
CAN总线步进电机驱动器(42型:7TCSM4210)使用说明书

CAN总线接口步进电机驱动器使用说明书(42型:7TCSM4210)1.产品特点☆S加减速曲线,运行平稳,用户可更S曲线改参数☆微型设计,安装便利,可与42步进电机一体化☆网络集散控制,CAN2.0组网☆支持定位模式和速度模式☆停止运行时自动半流☆电气接口简洁,且接线方便☆零位准确,有复位时的零位脱落动作,及圆周模式下零位自动零点校准☆提供计算机调试软件、DLL和嵌入式源代码,方便调试和二次开发2.产品参数产品参数产品可更改运行参数外观尺寸 42.2mm×42.2mm×14.5mm 可设置 CAN.ID相电流 0.5A-2A连续可调可设置细分1、2、4、8、16、32工作电压 DC12V-32V 可设置运动模式(圆周或者直线运动)步进细分1、2、4、8、16、32 可设置启动速度和最大速度步进频率 20Hz-20KHz可调可设置电机空闲脱机零位电气PNP和推挽(0-24V)可设置复位光电开关脱落步数CAN接口 CAN2.0A 可设置复位到零点触发电平存储温度-20°~85°可设置最大步数(圆周运动一圈步数,直接运行最大行程)保护电路过热、过流、过载、电源反接、CAN接口TVS3.电气接口4.典型使用☆ CAN总线与计算机网口连接使用☆ CAN总线与计算机USB连接使用☆ CAN总线与嵌入式控制器连接使用与计算机网口连接使用:☆ N个7TCSM4210☆ N个其它CAN设备(可选)☆ 1个网络转CAN(7TCNET10)与计算机USB连接使用:☆ N个7TCSM4210☆ N个其它CAN设备(可选)☆ 1个USB转CAN(7TCUSB10)与嵌入式控制器连接使用:☆ N个7TCSM4210☆ N个其它CAN设备(可选)☆ 1个嵌入式CAN控制器(7TCMCUxx)5.运行及工作模式说明步进电机工及其驱动正转和反转的原理结构如下:运动方式分为:循环圆周运动和直接往复运动。
步进电机驱动器使用手册说明书

步进电机驱动器使用手册目录1安全事项 (2)2产品外形 (4)2.1产品外形 (4)3接口定义 (5)3.1电机、电源接口C N1 (5)3.1.1两相步进电机接线 (5)3.1.2五相步进电机接线 (6)3.2控制接口C N2 (7)3.2.1脉冲(P u l)信号/上限位信号 (9)3.2.2方向(D i r)信号/下限位信号 (9)3.2.3回零(Z e r o)信号/原点信号 (9)3.2.4脱机/使能(F r e e/E n a b l e)信号 (9)3.2.5到位(I N P)信号 (10)3.2.6就绪(R D Y)信号 (11)3.2.7接口电压 (11)3.3编码器接口C N3 (13)3.4U S B接口C N4 (14)3.5M o d b u s接口C N5 (15)4L E D指示 (16)4.1状态指示L E D (16)4.2通讯指示L E D (18)5性能参数 (18)5.1机械参数 (18)5.2安装尺寸 (19)6应用指南 (20)6.1安装准备 (20)6.2机械安装 (20)6.3电气安装 (21)6.4日常维护 (21)6.5注意事项 (21)6.5常见问题 (22)为保障使用者人身安全,保护设备正常使用,请务必阅读并遵守本章的安全事项。
在操作时违反本事项所示要求,可能会导致人员重伤或者死亡。
在操作时违反本事项所示要求,可能会引起驱动器永久损坏及附加事故。
谨防触电,爆炸或其他危险禁止在易爆、易燃或腐蚀性环境使用本产品;禁止开启产品外壳;驱动器带电时内部电压可能超过36VDC,驱动器和电机都必须接安全保护地线;驱动器内部电压不会瞬间释放,必须先切断电源,等指示灯熄灭后才能进行插拔、接线、设置、测量、搬动等人工操作;禁止带电插拔;驱动器故障时温度可能很高,必须先切断电源,等下降至安全温度后才能进行人工操作;驱动器应用于直接涉及人身安全的设备,必须配备人身安全防范措施;驱动器或设备故障时可能存在火灾隐患,必须配备消防安全防范措施。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
..
步进电机驱动器控制信号接口说明
驱动器是把计算机控制系统提供的弱电信号放大为步进电机能够接受的强电流信号,控制系统提供给驱动器的信号主要有以下三路: 1.步进脉冲信号CP:这是最重要的一路信号,因为步进电机驱动器的原理就是要把控制系统发出的脉冲信号转化为步进电机的角位移,
或者说:驱动器每接受一个脉冲信号CP,就驱动步进电机旋转一步距角, CP的频率和步进电机的转速成正比, CP的脉冲个数决定了步进电机旋转的角度。
这样,控制系统通过脉冲信号CP就可以达到电机调速和定位的目的。
2.方向电平信号
DIR:此信号决定电机的旋转方向。
比如说,此信号为高电平时电机为顺时针旋转,此信号为低电平时电机则为反方
向逆时针旋转。
此种换向方式,我们称之为单脉冲方式。
另外,还有一种双脉冲换向方式:驱动器接受两路脉冲信号(标注为CW和CCW),当其中一路(如CW)有脉冲信号时,电机正向运行,当另一路(如CCW)有脉冲信号时,电机反向运行。
用户使用何种方式,由拨位开关设定。
3.使能信号EN:此信号在不连接时默认为有效状态,这时驱动器正常工作。
当此信号回路导通时,驱动器停止工作,这时电机处于无力矩状态(等同于本公司SH系列驱动器的FREE信号),此信号为选用信号。
为了使控制系统和驱动器能够正常的通信,避免相互干扰,我们在驱动器内部采用光耦器件对输入信号进行隔离,三路信号的内部接口电路相同,常用的连接方式为①共阳方式:把CP+、DIR+和EN+接在一起作为共阳端接外部系统的+5V,脉冲信号接入CP-端,方向信号接入DIR-端,使能信号接入EN-端;②共阴方式:把CP-、DIR-和EN-接在一起作为共阴端接外部系统的GND,脉冲信号接入CP+端,方向信号接入DIR+端,使能信号接入EN+端;③差动方式:直接连接。
驱动器输入信号内部接口示意图
如果驱动器输入信号为电压信号,要求:3.6V≤高电平≤5.5V; -5.5V≤低电平≤0.3V,最常用的为TTL电平。
如果驱动器输入信号为电流信号,要求:7mA≤高电流≤18mA; -18mA≤低电流≤0.2mA。
不管是电压信号还是电流信号,最终转化为光耦器件的输入电流以达到信号传输的目的(参考上图),如果电压信号的幅值超出以上要求的范围须在外部另加限流电阻R,保证给驱动器内部光耦提供7-18mA的驱动电流,参见下图和下表。
步进电机的运行是由脉冲信号控制的,步进电机在脉冲信号的有效沿到来的时刻移动一个步距角,本系列驱动器的有效沿是指:脉冲信号电流“由小到大”的时刻,或者说脉冲电平“由低到高”的时刻,或者说是驱动器内部光耦“由截止到打开”的时刻。
脉冲信号的频率要求不大于200KHz;
脉冲信号的宽度要求不小于2μS。
脉冲信号的驱动电流要求为7-18mA
电机换向时,一定要在电机降速停止后再换向。
换向信号要求在前一个方向的最后一个脉冲有效沿结束至少5μS以上才能改变换向信号,且不滞后下一个脉冲信号的有效沿。
如果使用双脉冲CW/CCW方式,则要求下一个方向的第一个脉冲(如CCW)在前一个方向的最后一个脉冲(CW)有效沿后至少5μs才能有效。