电机同步角速度
同步电机矢量方程
同步电机矢量方程
同步电机的矢量方程主要描述电机在旋转坐标系下的电压、磁链、转矩和运动等关系。
这些方程通常是在dq轴(直接和正交轴)坐标系下表示的,其中d轴与转子磁链对齐,q轴超前d轴90度。
以下是一些常见的同步电机矢量方程:
1.电压方程:
1.Ud = Rs Id - we Lq*Iq
2.Uq = Rs Iq + we Ld Id + weΨm
其中,Ud和Uq是d轴和q轴上的电压分量;Rs是定子电阻;Id和Iq是d轴和q轴上的电流分量;we 是电角速度;Ld和Lq是d轴和q轴上的电感分量;Ψm是永磁体磁链。
2.磁链方程:
1.ψd = Ld*Id + Ψm
2.ψq = Lq*Iq
其中,ψd和ψq是d轴和q轴上的磁链分量。
3.转矩方程:
1.Te = p*(Ψm*Iq + (Ld - Lq)Id Iq)
其中,Te是电磁转矩;p是电机的极对数。
4.运动方程:
1.J d(we)/dt = Te - Tl - B we
其中,J是转动惯量;Tl是负载转矩;B是摩擦系数。
这些方程在电机控制中非常重要,特别是在矢量控制中。
矢量控制是一种通过独立控制电机的转矩和磁通来实现高性能控制的方法。
通过坐标变换,可以将定子电流分解为转矩分量和磁通分量,并分别对它们进行控制,从而实现对电机转速和转矩的精确控制。
需要注意的是,这些方程适用于理想情况,并且在实际应用中可能需要进行适当的修正和调整,以考虑电机的非理想特性和外部因素。
此外,不同的电机类型和控制系统可能会采用不同的方程和参数表示方法。
maxwell软件- 调速永磁同步电机
13调速永磁同步电机在用户已经掌握RMxprt 基本使用的前提下,我们将一些过程简化,以便介绍一些更高级的使用。
有关RMxprt 的详细介绍请参考第一部分的章节。
13.1基本原理调速永磁同步电机的转子转速是通过调节输入电压的频率来控制的。
与标准的直流无刷电机不同,这种电机不需要位置传感器。
永磁同步电机的转子上安装永磁体(有内转子与外转子之分),定子上嵌有多相电枢绕组,其极数与转子相同。
永磁同步电机既可用作发电机,也可用作电动机。
当电机工作在电动状态时,定子多相绕组可由正弦交流电源供电或由直流电源经DC/AC 变换来供电。
当电机工作在发电状态时,定子多相绕组为负载提供交流电源。
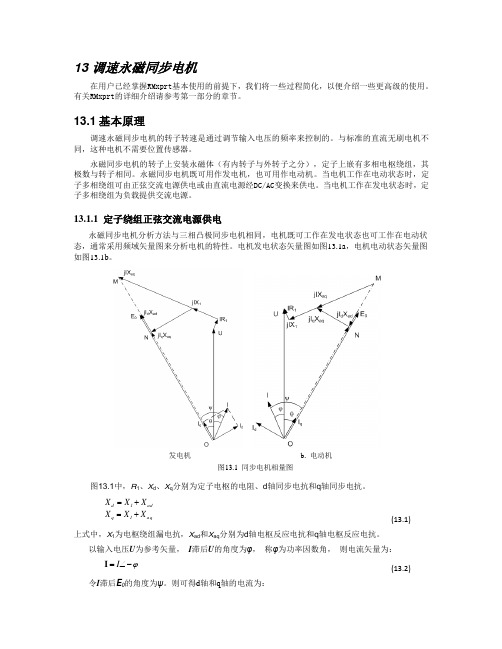
13.1.1 定子绕组正弦交流电源供电永磁同步电机分析方法与三相凸极同步电机相同,电机既可工作在发电状态也可工作在电动状态,通常采用频域矢量图来分析电机的特性。
电机发电状态矢量图如图13.1a ,电机电动状态矢量图如图13.1b 。
发电机b. 电动机图13.1 同步电机相量图图13.1中,R 1、X d 、X q 分别为定子电枢的电阻、d 轴同步电抗和q 轴同步电抗。
aq1q ad 1d X X X X X X +=+=(13.1)上式中,X 1为电枢绕组漏电抗,X ad 和X aq 分别为d 轴电枢反应电抗和q 轴电枢反应电抗。
以输入电压U 为参考矢量, I 滞后U 的角度为φ, 称φ为功率因数角, 则电流矢量为:ϕ-∠=I I(13.2)令I 滞后E 0的角度为ψ。
则可得d 轴和q 轴的电流为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=ψψcos sin I I I q d I (13.3)所以:qd 1I I -=tan ψ (13.4)13.1.1.1 发电机模型在图13.1a ,OM 所代表的矢量可表示为:)j j (aq 11X X R OM +++=I U (13.5)OM 所代表的矢量可用来确定E 0的位置。
令U 滞后E 0的角度为θ,对于发电机称θ为功角,则角度ψ为θϕψ+=(13.6)对于给定的功角θ,我们有;⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-θθsin cos U U E I I X R R X 0q d q 11d (13.7)求得I d 和I q 为:⎥⎦⎤⎢⎣⎡--+-+=⎥⎦⎤⎢⎣⎡θθθθsin )cos (sin )cos (U X U E R U R U E X X X R 1I I d 0110q qd 21q d(17.8)功率角φ:θψϕ-=(13.9)输出电功率:ϕcos UI 3P 2=(13.10)输入机械功率:)(Fe Cua fw 21P P P P P +++= (13.11)式中P fw 、P Cua 、P Fe 分别为风摩损耗、电枢铜损和铁心损耗输入机械转矩:ω11P T =(13.12)ω为同步角速度rad/s13.1.1.2 电动机模型在图13.1, OM 所代表的矢量可表示为:)j j (aq 11X X R OM ++-=I U (13.5’)OM 所代表的矢量可用来确定E 0的位置。
电机与拖动 刘锦波第8章 习题解答
jxd I&d
jxq I&q q
•
E0
•
Uθ
•
Ia
ϕψ
•
Iq
d
•
Id
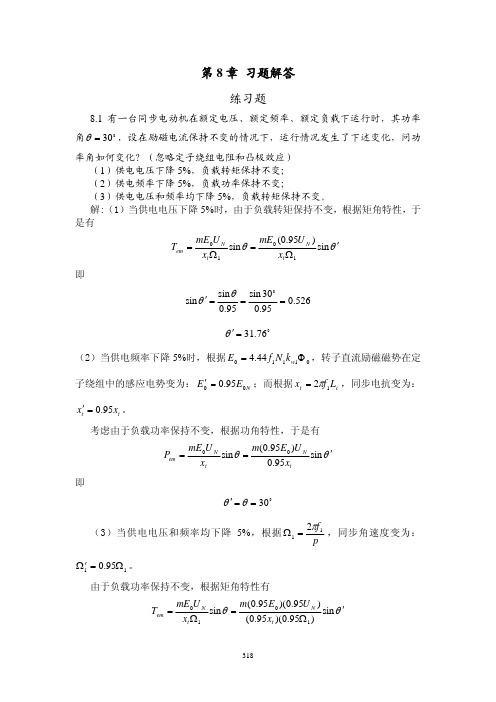
(1) 由相量图 8.35 得
图 8.35 练习题 8.3 图
I
* q
xq*
= U * sinθ
于是
I
* q
=
U*
sinθ N
x
* q
= 1× sin 25o 0.5
= 0.845
励磁磁势为
I
* d
=
I *2
−
I
*2 q
=
1 − 0.8452 = 0.535
+
xt
Ia
)
U Nφ cosϕ
= arctan(380 / 3 × 0.6 + 1.55 × 56.98) 380 / 3 × 0.8
= 51.38o
又功率因数角
ϕ = arccos(0.8) = 36.87o
故功率角为
θ = Ψ − ϕ = 51.38o − 36.78o = 14.60o
(2)移去原动机后,由于原动机的输入功率为零,忽略各种损耗,则 Pem = 0 。
由相量图图 8.34 可得定子每相绕组的感应电势为
E0 = (U Nφ cosϕ)2 + (U Nφ sin ϕ + xt I a )2
= (380 × 0.8)2 + (380 × 0.6 + 1.55 × 56.98)2
3
3
= 281.4V
319
内功率因数角为
Ψ
=
U arctan(
Nφ
同步电机和异步电机的区别

摘要:目前,随着同步电机在调速性能方面的逐渐改善,已在大容量变频调速领域内广泛使用。
在高速列车上,法国率先采用同步牵引电机,它的功率因数可接近1,解决了异步电机功率因数低的问题。
本文针对同步电机和异步电机在轨道调速系统中的差异进行了分析。
关键词:同步电机;异步电机;功率因数;变频调速;1.引言随着同步电机的调速性能和控制精度的提高,同步电机在高速列车的牵引传动领域中也逐渐占据一席之地,例如,法国TGV的牵引电机采用的都是同步电机。
由于异步电机功率因数低(基本都在0.9以下)是一个很难克服的缺陷,而同步电机理想功率因数可以到达1,例如法国TGV的功率因数可以达到0.99,除此以外,同步电机还有容量大、转速恒定等优点,因此,同步电机在牵引传动领域中还有很大的发展空间。
同步电动机在调速系统中的缺点正逐渐被解决,例如现在通常采用永磁同步电机,避免同步电机的励磁装臵引发的问题和增加的维护工作量。
但是,同步电机在调速方面略逊于异步电机,且结构较复杂,成本较高,因此,异步电机在牵引传动领域仍占优势。
2.感应电机的工作原理定子中通以三相电流产生旋转磁场,由于感应电机的转子绕组是自行闭合的绕组,根据电磁感应原理,转子绕组中会产生感应电流,感应电流与旋转磁场相互作用产生电磁转矩。
正常情况下,感应电机的转子转速总是略低或略高于旋转磁场的转速。
感应电机的运行状态与转差率有关,s>1为电磁制动状态,0<s<1为电动机状态,s<0为发电机状态。
转差率公式:经过频率归算和绕组归算,得到感应电动机的T型等效电路,如图1所示。
由图1可知,感应电动机是一个感性电路,所以感应电动机的功率因数角在(,)范围内。
因此,感应电机在运行过程中不断从电网吸收无功功率。
当感应电机在空载运行时,转子转速接近于同步转速,,,转子电流接近于零,定子电流基本上是激磁电流(主要成分是无功的磁化电流),所以功率因数很低,约为0.1-0.2。
永磁同步电机基础知识

(一)PMS 的数学模型交流电机是一个非线性、强耦合的多变量系统。
永磁同步电机的三相绕组分 布在定子上,永磁体安装在转子上。
在永磁同步电机运行过程中,定子与转子始 终处于相对运动状态,永磁体与绕组,绕组与绕组之间相互影响,电磁关系十分 复杂,再加上磁路饱和等非线性因素,要建立永磁同步电机精确的数学模型是很 困难的。
为了简化永磁同步电机的数学模型,我们通常做如下假设:1) 忽略电机的磁路饱和,认为磁路是线性的;2) 不考虑涡流和磁滞损耗;3) 当定子绕组加上三相对称正弦电流时,气隙中只产生正弦分布的磁势, 忽略气隙中的高次谐波;4) 驱动开关管和续流二极管为理想元件;5) 忽略齿槽、换向过程和电枢反应等影响。
永磁同步电机的数学模型由电压方程、 磁链方程、转矩方程和机械运动方程 组成,在两相旋转坐标系下的数学模型如下:(I )电机在两相旋转坐标系中的电压方程如下式所示:R s i d L d 鱼sd d dtdi q R s i q L q 」 q q dt度,P 为同步电机的极对数,3 c 为电角速度, 绕组反电动势的.3倍。
u d U q 其中,Rs 为定子电阻; q 轴上对应的两相电流; 书d 、书q 分别为直轴磁链和交轴磁链。
若要获得三相静止坐标系下的电压方程, 静止坐标系的变换,如下式所示uq 分别为d 、q 轴上的两相电压;id 、iq 分别为d 、 Ld 、Lq 分别为直轴电感和交轴电感;3 c 为电角速度; ud 、 则需做两相同步旋转坐标系到三相 U aU bU ccos sin 3 cOs( cos( 3 ) 2) sin( sin( dL d i dfq L q i qU d U q其中,书f 为永磁体产生的磁链,为常数,是机械角速 eO 为空载反电动势,其值为每项(2) d/q 轴磁链方f(3)转矩方程:3T e P d i q q i d2把它带入上式可得:T e p f i q (L d L q)i d i q3 3-p f i q - p(L d L q)i d i q2 2对于上式,前一项是定子电流和永磁体产生的转矩,称为永磁转矩;后一项是转子突极效应引起的转矩,称为磁阻转矩,若Ld=Lq,则不存在磁阻转矩,此时,转矩方程为:k t i q3这里,k t为转矩常数,k t 3 p f(4)机械运动方程:T e Jd dt m B m T L其中, m是电机转速, T L是负载转矩, J是总转动惯量(包括电机惯量和负载惯量),B是摩擦系数(二) 直线电机原理永磁直线同步电机是旋转电机在结构上的一种演变,相当于把旋转电机的定子和动子沿轴向剖开,然后将电机展开成直线,由定子演变而来的一侧称为初级,转子演变而来的一侧称为次级。
电机角速度计算公式

电机角速度计算公式电机角速度这个概念,在物理学中那可是相当重要的哟!咱先来说说啥是电机角速度。
简单来讲,电机角速度就是电机转动的快慢程度的一个衡量指标。
就好像你骑自行车,车轮转得快,那角速度就大;车轮转得慢,角速度就小。
那电机角速度咋计算呢?一般来说,电机角速度ω = 2πn/60 ,这里的 n 表示电机的转速,单位是转每分钟(r/min)。
我给您举个例子哈,有一次我去一个工厂参观,看到那些巨大的电机在轰轰运转。
当时有个年轻的工人师傅正在调试一台电机,他拿着本子和笔,一边观察仪表上的转速数据,一边嘴里念叨着这个角速度的计算公式。
我好奇地凑过去问他:“师傅,这公式您用得这么溜,是不是经常算呀?”他抬头看了我一眼,笑着说:“那可不,这电机的角速度可是关系到整个生产线的效率呢。
要是算错了,那麻烦可就大啦!”我在旁边看着他认真专注的样子,心里不禁感叹,这小小的公式,在实际工作中竟然有着这么关键的作用。
咱再深入讲讲这个公式。
2π 是个固定的值,它表示圆周运动一周的角度。
而 60 呢,是把分钟转化为秒。
因为在国际单位制中,角速度的单位是弧度每秒(rad/s)。
比如说,如果一台电机的转速是 1200 转每分钟,那按照公式算一下,ω = 2π×1200/60 ,算出来就是40π 弧度每秒。
在实际应用中,准确计算电机角速度非常重要。
比如说在一些自动化生产线上,电机的角速度要和其他设备的运行速度匹配好,不然就会出现生产不协调的问题,要么产品积压,要么跟不上需求。
而且呀,不同类型的电机,其角速度的计算可能还会受到一些其他因素的影响。
比如电机的负载大小、电源电压的稳定性等等。
就像我有个朋友,他们公司新引进了一批先进的电机设备,结果在运行初期,总是出现产品质量不稳定的情况。
后来一查,原来是电机角速度的计算出了偏差,导致设备之间的协同工作出了问题。
经过一番仔细的调整和计算,终于让生产线恢复了正常,产品质量也有了保障。
转子串电阻调速
绕线转子异步电动机转子串电阻电感起动与调速方法的研讨绕城转子异步电动机能够通过转子串电阻进行起动与调速,但电阻上能耗大;如果转子串频敏变阻器,虽能减少损耗,但只能起动而不能调速。
本文提出一种转子串电阻、电感的方法,既能用于起动与调速,又能较大程度地节能。
IJ作原理如图1,在绕线电机转于绕组每相串入相同的电阻与电感。
首先我们考虑只串电感L的情况,电机运行时的临界转差率式中r;——定子绕组的电阻X;——定于绕组的电抗r二。
——转子绕组电阻的折算值X二——转子回路电抗的折算值teZ。
H。
0+XL其中X二。
——转子绕组电抗的折算值X、——转子串电感L的电抗折算值由于r;<<x。
,x;Wx。
,略去r;、x;,则即Sm与人成反比,与固有特性相比,临界转差率的值减少。
电机运行时的最大转矩为同理略去r;、x;,则式中m;——电机定子相数V;——电机定子相电压。
——电机同步角速度由式(2)可知,凡人与Xb也成反比,与固有特性相比,最大转矩减少。
由以上分析可知,转子串电感时的机械特性如图2中的曲线1(曲线0为电机的固有特性)。
在此基础上转子绕组再串入电阻Rnl 与Rn。
,由式(l)、式(2)可知:临界转差率随转子回路电阻的增加而增大,而最大转短不变,其机械(本文共计3页)......[继续阅读本文]转子上串联电阻可以降低启动电流增大启动转矩,同样也可以用于调速,但转子回路串联电阻调速的方式不理想,在电机轻载和空载的时候几乎起不到调速的作用,串联电抗器也可以减小起动电流,但是起动转矩也会减小很多,所以不采用串联电抗器来启动。
不是说三项绕线转子异步电动机转子回路串入电阻,可以增大起动转矩,串入电阻值越大,起动转矩越大?要合适是应该三相都串的,以保持三相平衡。
所串电阻增大,转速变低。
因为电阻增大,相当于电机端电压降低,电机机械特性变软,转差率增大。
负载恒定的时候,电机的电流会增大的。
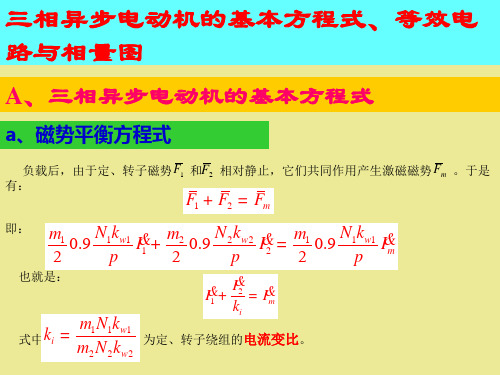
三相异步电机的基本方程式讲解
具体方法: 将三相异步电动机接到三相交流调压器上,电动机的转轴上不带任何机械负 UN 载,此时,转子转速 n » n1 , s » 0 。通过改变调压器的输出得U0 = (1.1~1.3) , P0 U0 U 0 、空载电流 I0 记录期间的定子电压 以及空载功率 。然后,逐渐降低 , = f (U0 ) (见图6.44)。 直至定子电流开始回升为止。绘出相应的空载特性: 、 I 0 P0
2 2 ¢ U P = P m I r = p + p 不变,于是, 0 之间必然为直线,如图6.45所示。 mec 与 Fe 0 0 1 0 1
图6.45
2 ¢ P = f ( U 0 0 )的关系曲线
由此可以将 p Fe 与 pmec 分离开来,然后再利用 U0 = U N 时的数值计算如下:
I2s = E2 s sE2 E2 = = = I2 r2 r2 + jx2s s r2 + jsx2s + jx2s s
(6-84)
上式左边各物理量的频率为转差频率 f 2 ,而右边各物理量的频率为定子频率 f1 (或 转子堵转时的情况)。由于两种频率下的电流有效值相等,因而折算前后相应的空间磁势 F2 保持不变。
结论: 频率折算相当于将旋转状态的转子绕组折算为堵转(或静止不动) 状态的转子绕组。折算后定、转子绕组的频率皆为 f1 。
m2 , N 2 k w 2
图6.38 三相异步电机经频率折算后的等效电路
转子机械轴上 总的机械输出 功率对应的等 效电阻
图6.38中,转子绕组的电阻
r2 s
被分成两项:
转子绕组本身 的电阻
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机同步角速度
电机同步角速度是指电机转子的角速度与电源电压的频率相等的情况下的旋转速度。
在交流电机中,同步速度是由电源电压和绕组数量决定的。
在直流电机中,同步速度是由电源电压和电枢的设计决定的。
电机的同步速度通常以转每分(RPM)或每秒钟(rad/s)为单位。
在理想情况下,当电源电压的频率与电机的电学特性完全匹配时,电机会以同步速度旋转。
在现实情况下,由于电路的不完美性,存在一些误差,从而导致电机的实际速度略低于同步速度。
这种速度差称为滑差。
电机转速的稳定性和精度对于许多应用程序至关重要。
例如,在精密工具机和医疗设备中,对电机同步速度的控制必须非常精确。
如果电机速度不稳定或不准确,将导致设备出现性能问题或故障。
为了提高电机同步速度的精度和稳定性,现代电机系统使用高级控制技术和精密传感器来监测并调整电机的速度。
这些控制系统可以自动调整电机的输入电压和频率,以确保电机以精确的同步速度旋转。
在工业应用中,电机的同步速度也用于计算操作速度和生产效率。
例如,如果一个工厂需要在一小时内生产1000个零部件,并且电机的同步速度为1000转每分钟,则可以通过测量电机转速来确定生产率是否达到目标。
在总体而言,电机的同步速度是机器工程师在设计电机中需要考虑的重要因素。
了解电机同步速度如何影响电机性能以及如何优化电机控制系统可以帮助工程师设计出更加高效和可靠的电机系统。