张氏标定法原理及其改进1
张氏相机内参标定法

张氏相机内参标定法标题:解密张氏相机内参标定法:突破拍摄技术的边界摘要:本文将深入研究和讨论张氏相机内参标定法,这一在计算机视觉领域中重要的技术。
通过探索和解密内参标定法的原理和应用,我们将揭示其在拍摄技术中的巨大潜力。
我们还将介绍内参标定法的优点和局限,并提供一些个人观点和建议,以帮助读者充分了解这一概念,并将其运用于实际场景中。
正文:一、背景1. 什么是相机内参?相机内参是指相机的内部参数,是相机固有的特性。
它们包括焦距、像素大小、主点位置等参数,对于相机成像的准确性和质量至关重要。
2. 为什么需要相机内参标定?相机内参标定是为了准确估计相机的内部参数。
通过标定内参,我们能够消除图像中的畸变,提高图像质量,并且能够更好地进行三维重建和图像处理。
二、张氏相机内参标定法的原理及应用1. 张氏标定法的原理张氏相机内参标定法是一种利用棋盘格图案进行标定的方法。
通过在棋盘格图案上提取特征点,然后根据这些特征点计算相机的内部参数,从而实现对相机的标定。
2. 张氏标定法的优点与应用张氏相机内参标定法具有简单、高效、精度高等特点。
它广泛应用于机器视觉、增强现实、无人驾驶等领域。
通过标定相机内参,我们能够提高图像的质量和重建的准确性,从而实现更准确的目标检测、位姿估计等应用。
三、内参标定法的局限性与改进方向1. 畸变校正的局限性内参标定法虽然可以消除图像中的畸变,但在某些特殊场景下,仍然存在一定的误差。
当物体表面没有纹理或纹理信息缺失时,内参标定法可能无法准确标定。
2. 深度信息的获取目前内参标定法主要关注的是相机内部参数的标定,对于获取场景的深度信息并不完全透彻。
如果能够结合深度传感器等其他技术,将会进一步提高内参标定的准确性和应用范围。
四、个人观点与建议1. 针对复杂场景的改进对于特殊场景下的拍摄,我们可以尝试将纹理信息融合进内参标定法中,以提高鲁棒性和准确性。
2. 结合深度学习随着深度学习的兴起,我们可以尝试将内参标定法与深度学习方法相结合,通过学习的方式自动标定相机内参,进一步提高准确性和应用更广泛。
相机标定方法及进展研究综述
相机标定方法及进展研究综述相机标定是计算机视觉领域的重要研究方向之一,其目的是通过数学模型,将摄像机的内部参数和外部参数计算出来,从而提高图像的准确性和精度。
在图像处理、机器视觉、计算机视觉等领域中,相机标定是一个非常重要的问题,并且在机器人视觉、三维重建和增强现实等领域中得到了广泛的应用。
本文将对相机标定方法及进展研究进行综述。
一、相机标定方法常用的相机标定方法包括摄像机模型、单目相机的标定、立体相机的标定、将标定技术运用到实际应用的技术。
下面分别介绍。
1. 摄像机模型相机模型是相机标定的基础。
常用的相机模型主要包括针孔相机模型、中心投影相机模型、透视投影相机模型、鱼眼相机模型、全景相机模型等。
这些模型都是基于相机采集的图像和射线之间的关系建立的。
2. 单目相机的标定单目相机的标定主要包括内参数和外参数的标定。
内参数是相机焦距、像点中心等参数,外参数是相机的旋转和平移,可以用于计算世界坐标和相机坐标之间的转换矩阵。
常用的单目相机标定方法包括张氏标定法、Tsai相机标定法、基于控制点的标定法等。
3. 立体相机的标定立体相机的标定是通过对相机的双目视觉信息进行建模和分析,得到相机内部参数和外部参数的过程。
常见的立体相机标定方法包括非线性标定法、基于投影矩阵的标定法、基于球面投影的标定法等。
4. 将标定技术运用到实际应用的技术标定技术并不是研究的最终目的,而是运用到实际应用中的工具,如机器视觉、计算机视觉和图像处理等。
因此,如何将标定技术应用到实际应用中,是当前科学研究的关键问题。
常用的应用技术包括遮挡物检测、视觉跟踪、特征提取、目标检测等。
二、相机标定领域研究进展相机标定是一个广泛研究的领域,近年来研究取得了一定进展。
1. 智能相机标定智能相机标定是将计算机视觉与智能控制系统相结合,实现自动化相机标定的方法,主要包括多相机标定和自适应标定等。
2. 深度学习在相机标定中的应用深度学习是当前研究的重点之一,将深度学习应用到相机标定中可以提高标定的精度和效率。
(完整版)张正友相机标定法
0 0 1
设H矩阵中第i列的向量为 hi hi1 hi2 hi3 T
带入到 h1T AT A1h2 0 中有:
hiT B hj vijT b
解得: vij hi1hj1 hi1hj2 hi 2hj1
hi2h j 2
hi3hj1 hi1hj3
0
x0 x'
y0
y'
z0 1
z'
1
R r1 r2 r3
T (t1, t2 , t3 )T
r12 r22 r32 1 r1 • r2 r2 • r3 r3 • r1 0
x
y z
R 0
1
x'
T 1
y' z'
1
图像数字化
O1 在 u, v 中的坐标为 u0, v0
象素在轴上的物理尺寸为 dx, dy
V
Yd
Affine Transformation :
u
u0
xd dx
yd
cot
dx
v
v0
dy
yd sin
齐次坐标形式:
v0
张正友相机标定方法
曲峰
2020/2/16
1 相机畸变
镜头畸变实际上是光学透镜固有的透视失真的总称
枕形畸变:又称鞍形畸变,视野中边缘区域的放大率远大于光轴中心附近 区域放大率。常出现在远摄镜头中。
桶形畸变:同枕形相反,视野中光轴中心附近区域放大率远大于边缘区域。 常出现于广角镜头和鱼眼镜头。
张正友标定法
小组成员:张文豪 张智宇 陈宇
一、张正友标定法简介
目 二、张正友标定法数学原理 录 三、张正友标定法程序实现
四、标定实验及结果
张正友标定法 简介
像机标定:
建立摄像机图像像素位置与场景点位置 之间的关系,其途径是根据摄像机模型, 由已知特征点的图像坐标求解摄像机的 模型参数。
➢ 张正友标定法是张正友教授于1998年 在名为“A Flexible New Technique for Camera Calibration”一文中提 出的单平面棋盘格的摄像机标定方法。
➢ 透视投影
像平面 光心
f z
x=RX +
r01 r11
r02 r12
X Y
Tx Ty
z r20 r21 r22 Z Tz
[R,T]矩阵被称为外参数
光轴
K=
x f
y
0
1 0
K1K2
0 0 xc
f
0
yc
0 1 zc
u 1/ dx
v
B
K
T
K
1
B21
B22
B23
B31 B32 B33
b [B11, B12 , B22 , B13, B23, B33 ]
化简 hiT Bhj VijTb 得:
Vij [hi1hj1, hi1hj2 hi2hj1, hi2hj2 , hi3hj1 hi1hj3 , hi3hj2 hi2hj3 , hi3hj3 ]T
0
1 0
0 1/ dy
0
u0 x
v0
y
1 1
K矩阵被称为内参数
K1 K2
➢ 单应性映射
面向工业机器人的非线性手眼标定方法研究
现代电子技术Modern Electronics Technique2024年4月1日第47卷第7期Apr. 2024Vol. 47 No. 70 引 言随着我国制造强国战略逐步深化,人工智能制造[1]成为“中国制造2025”明确主攻方向,越来越多的工厂开始使用工业机器人和机器视觉实现自动化生产,使机器人能够适应更复杂的生产环境,提高生产效率。
作为实现人工智能制造和智慧城市基础[2]的手眼标定,是机器人和机器视觉进行协调工作的必要内容,通过重构三维场景获取相机坐标系和机器人坐标系之间的位姿关系,因此提升其精确度、标定范围和稳定性非常重要。
目前,标定的主要方法有主动视觉标定法、相机自标定法和传统相机标定法[3]。
主动视觉标定法优点在于不用借助标定物、稳定性强及算法简单,但成本高、设备昂贵;相机自标定法[4]灵活性强但精度低、鲁棒性差;传统相机标定法需要标定物辅助标定,但是算法足够成熟,鲁棒性强且操作简单[5⁃9]。
对于精度要求高和成本需要控制的场景,传统相机标定法能够满足要求。
其中常用的方法有直线标定法、Tsai 两步法和张氏标定法,这面向工业机器人的非线性手眼标定方法研究胡宇鹏, 蒋年德(东华理工大学 信息工程学院, 江西 南昌 330013)摘 要: 手眼标定是机器人视觉领域中的一个关键技术,主要包括眼在手上和眼在手外两种标定方式。
标定的目的是得到相机坐标系与机器人坐标系之间的位姿关系,根据相机获取的图像重构三维场景,求出两个坐标系之间的转换参数,其结果将直接影响到机器人精准作业。
受当前镜头工艺水平和机器误差限制,相机采集的图像存在非线性畸变,原有的手眼标定方法存在精确度不足的缺点。
针对这个问题,文中提出面向工业机器人的非线性手眼标定方法,通过卷积原理使矩阵参数适应镜头下不同区域畸变的方法,减小相机镜头畸变影响。
通过实验验证表明,该方法能够提高手眼标定结果的精确度,标定后的平均误差为0.4 mm ,稳定性更强,可满足更多场景需求。
农林作物三维重建方法研究进展

农林作物三维重建方法研究进展随着科技的不断进步,农林作物三维重建方法已成为研究农作物生长过程、优化农业生产的重要手段。
本文将概述农林作物三维重建方法的现状、研究方法及实验结果,并探讨未来的研究方向和发展趋势。
三维重建技术是指通过计算机技术和图像处理方法,将物体或场景转化为三维模型的过程。
近年来,随着计算机视觉、深度学习等技术的不断发展,三维重建技术已广泛应用于各个领域,包括农业、林业、医学、建筑等。
在农林作物领域,三维重建技术可以用于研究作物生长过程、监测作物病虫害、优化农业生产等方面,具有广阔的应用前景。
目前,农林作物三维重建方法主要包括以下几种:结构光三维重建法:通过结构光扫描获取物体的三维信息,然后利用三角测量原理重建出物体的三维模型。
该方法精度较高,但需要精密的设备支持,且操作较为复杂。
立体视觉三维重建法:通过多个视角的图像获取物体的三维信息,然后利用立体视觉原理重建出物体的三维模型。
该方法适用于远距离和动态目标的重建,但精度较低。
深度学习三维重建法:通过深度学习算法对图像进行特征提取和分类,然后利用分类结果生成物体的三维模型。
该方法适用于复杂结构和动态变化的物体,但需要大量的训练数据。
在农林作物领域,目前应用最为广泛的是深度学习三维重建法。
该方法可以通过对作物图像的学习,自动识别作物的不同部位,如叶片、茎秆、果实等,并生成作物的三维模型。
同时,深度学习算法还可以根据作物的形状、尺寸等特征进行分类和识别,从而为农业生产提供更为精确的数据支持。
在农林作物三维重建方法的研究中,我们采用了深度学习三维重建法进行研究。
具体流程如下:数据采集:收集不同种类农林作物的图像数据,包括正常生长状态和受灾状态下的图像。
数据预处理:对采集的图像进行预处理,包括图像增强、去噪、分割等操作,以提高图像质量和识别效果。
模型训练:利用深度学习算法对预处理后的图像进行训练,学习作物的特征和形态。
三维模型构建:在训练好的模型基础上,对新的图像进行分类和识别,并根据分类结果生成作物的三维模型。
机器人与双目相机的手眼标定方法

手眼标定的精度评估
重投影误差
重投影误差是一种评估手眼标定精度的常见方法。它计算的 是实际物体点在图像上的投影位置与通过手眼标定得到的理 论投影位置之间的欧氏距离。通常,重投影误差越小,手眼 标定的精度就越高。
均方根误差
均方根误差(RMSE)是一种衡量数据点误差分布的方法。 在手眼标定中,它可以用来评估手眼矩阵估计值的精度。通 过比较实际位姿和估计位姿之间的均方根误差,可以对手眼 标定的精度进行评估。
05
手眼标定的优化与改进
增加标定精度的方法
选用高精度的相机和标定板
使用高分辨率、高精度的相机和标定板可以增加标定精度 。
多次标定并取平均值
对同一场景进行多次标定,然后取平均值可以提高精度。
考虑非线性畸变
在相机标定时,需要考虑相机的非线性畸变,以提高标定 精度。
减少计算复杂度的方法
使用稀疏的相机标定
手眼系统的应用
在工业自动化领域,手眼系统可用于机器人在生产线上的物料分拣、装配、焊接等 作业,提高生产效率和产品质量。
在医疗领域,手眼系统可用于手术机器人实现精准、微创的手术操作,提高手术效 率和安全性。
在军事领域,手眼系统可用于无人车的导航、目标识别等任务,提高作战效率和准 确性。
02
手眼标定的原理
导航能力。
手眼标定技术的挑战与问题
鲁棒性问题
手眼标定的鲁棒性是一个关键问题,因为实际应 用中经常存在各种干扰和变化。
计算效率问题
手眼标定的计算效率也是一个重要问题,因为在 实际应用中需要快速计算出结果。
参数优化问题
手眼标定的参数优化是一个难点,因为需要找到 最优的参数以保证标定的精确度和鲁棒性。
THANKS
建立数学模型
SLAM入门之视觉里程计(6):相机标定张正友经典标定法详解
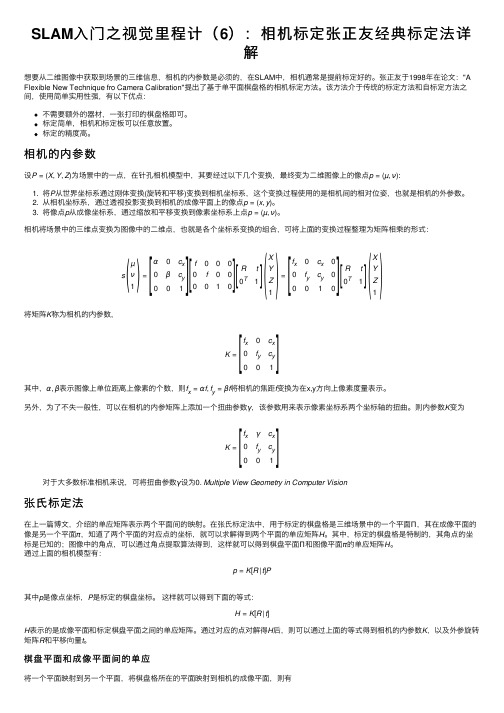
SLAM ⼊门之视觉⾥程计(6):相机标定张正友经典标定法详解想要从⼆维图像中获取到场景的三维信息,相机的内参数是必须的,在SLAM 中,相机通常是提前标定好的。
张正友于1998年在论⽂:"A Flexible New Technique fro Camera Calibration"提出了基于单平⾯棋盘格的相机标定⽅法。
该⽅法介于传统的标定⽅法和⾃标定⽅法之间,使⽤简单实⽤性强,有以下优点:不需要额外的器材,⼀张打印的棋盘格即可。
标定简单,相机和标定板可以任意放置。
标定的精度⾼。
相机的内参数设P =(X ,Y ,Z )为场景中的⼀点,在针孔相机模型中,其要经过以下⼏个变换,最终变为⼆维图像上的像点p =(µ,ν):1. 将P 从世界坐标系通过刚体变换(旋转和平移)变换到相机坐标系,这个变换过程使⽤的是相机间的相对位姿,也就是相机的外参数。
2. 从相机坐标系,通过透视投影变换到相机的成像平⾯上的像点p =(x ,y )。
3. 将像点p 从成像坐标系,通过缩放和平移变换到像素坐标系上点p =(µ,ν)。
相机将场景中的三维点变换为图像中的⼆维点,也就是各个坐标系变换的组合,可将上⾯的变换过程整理为矩阵相乘的形式:s µν1=α0c x 0βc y1f 0000f 0001R t 0T1X Y Z1=f x 0c x 00f yc y 001Rt 0T1X Y Z1将矩阵K 称为相机的内参数,K =f x0c x 0f yc y 001其中,α,β表⽰图像上单位距离上像素的个数,则f x =αf ,f y =βf 将相机的焦距f 变换为在x,y ⽅向上像素度量表⽰。
另外,为了不失⼀般性,可以在相机的内参矩阵上添加⼀个扭曲参数γ,该参数⽤来表⽰像素坐标系两个坐标轴的扭曲。
则内参数K 变为K =f xγc x 0f yc y 01对于⼤多数标准相机来说,可将扭曲参数γ设为0. Multiple View Geometry in Computer Vision张⽒标定法在上⼀篇博⽂,介绍的单应矩阵表⽰两个平⾯间的映射。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
张正友算法原理及其改进由于世界坐标系的位置可以任意选取,我们可以假定世界坐标系和摄像机坐标系重合,故定义模板平面落在世界坐标系的0W Z =平面上。
用i r 表示R 的每一列向量,那么对平面上的每一点,有:[][]123120111W W W W X u X Y s v A r r r t A r r t Y ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦这样,在模板平面上的点和它的像点之间建立了一个单应性映射H ,又称单应性矩阵或投影矩阵。
如果已知模板点的空间坐标和图像坐标,那么就已知m 和M ,可以求解单应性矩阵H 。
)1,,(w w Y X )1,,(v u因为11W W u X s v H Y ⎡⎤⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦,其中11121321222331321h h h H h h h h h ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,可推出: 11121321222331321W W W W W W su h X h Y h sv h X h Y h s h X h Y =++⎧⎪=++⎨⎪=++⎩故,1112133132212223313211W W W W WW W W h X h Y h u h X h Y h X h Y h v h X h Y ++⎧=⎪++⎪⎨++⎪=⎪++⎩将分母乘到等式左边,即有31321112133132212223W W W W W W W W uX h uY h u h X h Y h vX h vY h v h X h Y h ++=++⎧⎨++=++⎩又令[]Th h h h h h h h h 3231232221131211=',则10000001WW W W WWWW X Y uX uY u h X Y vX vY v --⎡⎤⎡⎤'=⎢⎥⎢⎥--⎣⎦⎣⎦多个对应点的方程叠加起来可以看成Sh d '=。
利用最小二乘法求解该方程,即1()T T h S S S d -'=,进而得到H 。
摄像机内部参数求解在求取单应性矩阵后,我们进一步要求得摄像机的内参数。
首先令i h 表示H 的每一列向量,需要注意到上述方法求得的H 和真正的单应性矩阵之间可能相差一个比例因子,则H 可写成:[][]12312h h h A r r t λ=又因为1r 和2r 是单位正交向量,所以有1210T T h A A h --=111122T T T T h A A h h A A h ----=这样就为内参数的求解提供了两个约束方程。
下面,令()()()1112131212223313233002222000222222222000000002222222111T B B B B A A B B B B B B v u v u v v u v u v u v v γβγααβαβγγβγγαβαββαββγγβγβγβαβαββαββ--⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦⎡⎤--⎢⎥⎢⎥⎢⎥--⎢⎥=+--⎢⎥⎢⎥---⎢⎥--++⎢⎥⎣⎦注意到B 是一个对称矩阵,所以它可以由一个6维向量来定义,即[]111222132333Tb B B B B B B =设H 的第i 列向量为123[,,]T i i i i h h h h =,因此有 T T i j ij h Bh V b =其中111221223113322333,,,,,Tij i j i j i j i j i j i j i j i j i j V h h h h h h h h h h h h h h h h h h ⎡⎤=+++⎣⎦,那么,就可以将内参数的两个约束写成关于b 的两个方程为:1211220TT T V b V V ⎡⎤=⎢⎥-⎢⎥⎣⎦如果有n 幅图像的话,把它们的方程式叠加起来,得到0Vb =其中,V 是一个26n ⨯的矩阵。
当3n ≥时,一般情况下,b 可以在相差一个尺度因子的意义下唯一确定;当2n =时,此时的方程的个数少于未知数的个数,我们可以加上一个附加约束0γ=,即120B =,因此可用[]0100000b =作为式的一个附加方程。
方程的最小二乘解即是T V V 的最小特征值对应的特征向量,将该向量归一化即得到要求的b ,进而得到B ;当1n =时,两个方程只能解两个未知数,我们可以假定光心投影在图像的中心,从而求出摄像机在水平和垂直方向上的最大倍数。
一旦b 被求出,就能根据下面两种方法计算出摄像机的内参数矩阵A : (1)由b 构造出B ,再利用Cholesky 矩阵分解算法求解出1A -,再求逆得到A 。
(2) 由b 构造出B ,在相差一个尺度因子的意义下(1T B A A λ--=,其中为λ尺度因子) ,由绝对二次曲线的性质,很容易求出摄像机的内部参数:2012131123112212()/()v B B B B B B B =-- 2221301213112311[()]/B B v B B B B B λ=-+-x fy f =212/x y B f f αλ=-20013//x x u v f B f αλ=-摄像机外部参数求解由每幅图像的单应性矩阵H 和上一节的计算结果就可以求得每幅图像的外部参数。
一旦A 求得后,根据式,每幅图像的外部参数很容易求出:111r A h λ-= 122r A h λ-= 312r r r =⨯ 13t A h λ-=这里的尺度因子11121/1/A h A h λ--==。
当然,由于图像必然有噪声,因此这样解得的123[,,]R r r r =并不能完全满足旋转矩阵的性质,所以要从一个给定的矩阵求解一个最佳的旋转矩阵。
非线性优化(优化内参)以上我们所得到的摄像机的内参数矩阵和每幅图像对应的外参数矩阵都只是一个粗糙解,没有具体的物理意义,可以通过最大似然估计对所有参数进行非线性优化,进一步求精。
在这里可以假定有n 幅关于模板平面的图像,模板平面上有m 个标定点,那么可建立评价函数:()211,,,nmij i j i j C m m A R t M ===-∑∑其中ij m 是第i 幅图像中的第j 个像点,i R 是第i 幅图坐标系的旋转矩阵,i t 是第i 幅图坐标系的平移向量,j M 是第j 个点的空间坐标,(),,,i j m A R t M 是通过这些已知量求得的像点坐标。
由于旋转矩阵有9个参量但是只有三个自由度,因此可用三个参量的矢量来表示,即一个旋转可由一个三维向量即旋转向量来表示,他的方向就是旋转轴的方向,他的模等于旋转角。
由三个欧拉角参数确定,123(,,)T r r r r 是旋转矩阵的罗德里克(Rodrigues)表示,R 与r 之间的关系由公式给出:22sin /[](1cos )/[]x x R I r r θθθθ=++-其中,旋转向量T z y x r ),,(=,定义由它构成的反对称矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=000][x y x z y z r x , 其中||||222r z y x =++=θ是旋转角。
使评价函数最小的,,,i j A R t M 就是这个问题的最优解。
这是一个经典的非线性最小二乘问题,对式求极小值仍采用Levenberg-Marquardt 算法来求解,其初始估计可利用上面线性求解的结果。
很明显可以看出,计算顺序依次是投影矩阵、内部参数、外部参数,最后进行优化。
对径向畸变处理(u,v)理想像素坐标,),(v u 为实际的像素坐标,同样(x,y)和),(y x 为理想和实际的图像坐标。
⎪⎩⎪⎨⎧++++=++++=])()([])()([22222212222221y x k y x k y y y y x k y x k x x x 其中,21,k k 为径向畸变,对于中心点畸变同样适用:⎪⎩⎪⎨⎧+++-+=+++-+=])()()[(])()()[(2222221022222210y x k y x k v v v v y x k y x k u u u u 可以通过下面的方法求解畸变系数:⎥⎥⎦⎤⎢⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡+-+-+-+-v v u u k k y x v v y x v v y x u u y x u u 2122202202220220))(())(())(()()( 高斯一牛顿方法优化:可以利用极大似然估计来得到畸变系数:21121||),,,,,(||∑∑==-n i mj j i i ijM t R k k A m m非线性优化的过程:采用高斯一牛顿方法,而没有用Levenberg 一Marquardt(LM)法是因为在实际应用中发现,如果没有先验知识,LM 法阻尼因子u 不知道去什么值合适,而随意的取值使得方程在求解时收烟速度慢。
而高斯一牛顿法在求解的附近一般收敛速度快,虽然对初始值要求严格,当初始值与实际值偏离的太远,其系数阵J T J 容易出现病态解,但是,所以参数的初始值必须要做优化。
这里),,,,(j i i c M T R K K m 是点j M 按照投影公式在第i 幅图片上的投影,K 是摄像机标定内参数矩阵,c K 是畸变系数矩阵,i R 、i T 是第i 副图像的外参数矩阵,其中R 通过Rodrigues 公式用三个参数的旋转向量r 来表达。
优化的步骤:(1)、首先确定目标函数。
这里的优化的目的是使优化后的外参数,按照本文建立的摄像机模型将空间点投影到图像平面上时,投影点与实际获取的图像控制点之间的残差平方和最小。
不妨设投影函数为其中K 是摄像机内参数矩阵,是畸变系数矩阵,是旋转向量,T 是平移矩阵,是模板平面上控制点i M 的坐标。
是投影点图像像素坐标,该点实际的图像坐标是,共n 个控制点。
要优化外参数,则最后需要的偏导数系数Jacobian 矩阵r m i ∂∂/和T m i ∂∂/得组合,而函数)显然是个复合函数,因此这实际上是个复合函数求偏导的问题。
下面针对第一次迭代即r=r 0、T=T 0为初值时的一个点来分步求解第一步,是r 与R 的转换。
由Rodrigues 公式可以求出.第二步,是世界坐标系到摄像机坐标系的转换。
由坐标转换公式求出摄像机坐标系下的坐标及相应偏导数系数阵:这里偏导数矩阵中的下标i 表示求出偏导数矩阵后,再将当前点(即第i 点)各相应坐标代入以求得偏导数系数矩阵。
同时可以看出,若直接以R 为参量,因为复合函数求偏导是偏导矩阵相乘的关系,则由于是3*9矩阵而。
第三步,将厉ci M 转化为归一化图像坐标。
设ci M 的归一化图像坐标为ni M , 可得ni M 的计算公式及其偏导数系数阵:注意:表示qxp 系数矩阵B 将与矩阵A 中的所有分块矩阵ij A (i=1,2,,n,j=1,2,,m)均相乘,其中分块矩阵ij A (i=1,2,,n,j=1,2,,m)的行数等于系数矩阵B 的列数p 。