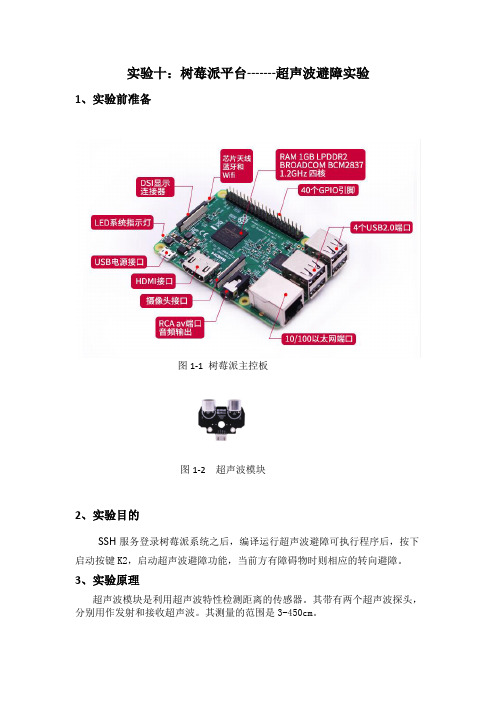
树莓派wifi智能小车基本原理
基于树莓派的智能车辆自动导航技术研究

基于树莓派的智能车辆自动导航技术研究智能车辆是未来交通领域的一个重要发展方向,而自动导航技术则是实现智能车辆的关键。
本文将探讨基于树莓派的智能车辆自动导航技术的研究内容和进展。
一、引言智能车辆自动导航技术是指利用计算机视觉、传感器等技术,使车辆能够在无人驾驶的情况下自动感知、计算和控制,实现路线规划、避障和车道保持等功能。
树莓派作为一种小型而强大的计算机平台,被广泛应用于智能车辆的研究中。
二、树莓派在智能车辆中的应用树莓派作为一个低功耗、高性能的嵌入式计算机平台,可方便地实现车辆的感知和决策。
通过连接摄像头模块和传感器,树莓派可以实时获取车辆周围的图像和环境信息,并通过图像处理和数据分析等算法,确定车辆的行驶方向和速度。
此外,树莓派还具备良好的扩展性,可以通过连接其他硬件模块,如超声波传感器和红外线传感器,进一步提高车辆的环境感知能力。
三、基于树莓派的智能车辆自动导航技术研究内容1.视觉感知和识别通过树莓派连接摄像头模块,实时获取车辆周围的图像信息,利用计算机视觉技术对图像进行处理和分析,实现道路识别、交通标志识别和车辆检测等功能。
其中,道路识别是智能车辆自动导航的基础,通过识别道路的边缘和特征物体,实现车道保持和车辆位置定位。
2.路径规划和导航基于树莓派的智能车辆可以通过激光雷达等传感器获取周围环境的三维点云信息,根据点云数据进行路径规划和导航。
利用树莓派的计算能力,可以实现实时的路径规划和障碍物避障,确保车辆行驶的安全和高效。
3.环境感知和决策树莓派连接超声波传感器和红外线传感器等硬件模块,可以实时感知车辆周围的障碍物和环境信息。
通过数据的处理和分析,树莓派可以对周围环境进行判断和决策,如判断前方是否有障碍物,并作出相应的行驶控制。
四、基于树莓派的智能车辆自动导航技术研究进展近年来,基于树莓派的智能车辆自动导航技术取得了一系列进展。
例如,研究人员通过利用树莓派的计算能力和图像处理算法,实现了实时的道路识别和车道保持功能。
使用树莓派制作智能小车

使⽤树莓派制作智能⼩车电影⾥,时不时地可以看到⼀些这样的场景,⼀辆⼩车,上⾯装有摄像头,这辆⼩车可以通过电脑或都是⼿机进⾏远程遥控,车上摄像头拍到的画⾯,可以实时地显⽰在电脑或⼿机上,就像下图这样。
没有接触过这⽅⾯的朋友或许会觉得这是⼀门很⾼⼤上的技术活,其实,并不然,这种⼩车做起来其实很简单。
那么,这样⼦的⼩车,需要怎么去做呢?其实,我们只需要准备⼀块控制⼩车的电路板(开发板),2到4个电机(马达)、⼩车架⼦⼀个、摄像头以及摄像头云台⼀个,以上这些基础配件,然后对开发板进⾏编程、控制就可以了,整体硬件成本加起来不到500块钱。
开发板:开发板有很多种,⽐如51单⽚机、树莓派、STM32、Arduino、micro:bit等等,都可以做为⼩车的控制板,我使⽤的是树莓派开发板,然后,可持树莓派有很多版本、型号,最便宜的树莓派zero 68元就可以买到,不过不建议买这种,没有⽹卡,需要另外买⽹线模块,我使⽤的是树莓派3B,价格220元,带有⽆线和有线⽹卡,还带有蓝⽛。
⼩车架⼦:某宝上有很多这种车架⼦,各式各样的,只需要在某宝上搜索“智能⼩车”就能找到,带上马达⼀整套,也就五六⼗块钱。
摄像头+云台:某宝上也是⼀搜⼀⼤堆,⽐如我下⾯⽤的那个,45块钱。
配件准备好了,就是给⼩车的开发板装系统,然后对⼩车进⾏编程控制。
⼩车的控制最主要有两⽅⾯的控制,⼀个是⼩车的前后左右的运动控制,⼀个是摄像头的拍摄、上下左右转运的控制。
#-*- coding:UTF-8 -*-import RPi.GPIO as GPIOimport time#⼩车电机引脚定义LeftIn1 = 20LeftIn2 = 21LeftSpeed = 16RightIn1 = 19RightIn2 = 26RightSpeed = 13#设置GPIO⼝为BCM编码⽅式GPIO.setmode(GPIO.BCM)#忽略警告信息GPIO.setwarnings(False)#电机引脚初始化操作def car_init():global pwm_LeftSpeedglobal pwm_RightSpeedglobal delaytimeGPIO.setup(LeftSpeed,GPIO.OUT,initial=GPIO.LOW)GPIO.setup(LeftIn1,GPIO.OUT,initial=GPIO.LOW)GPIO.setup(LeftIn2,GPIO.OUT,initial=GPIO.LOW)GPIO.setup(RightSpeed,GPIO.OUT,initial=GPIO.LOW)GPIO.setup(RightIn1,GPIO.OUT,initial=GPIO.LOW)GPIO.setup(RightIn2,GPIO.OUT,initial=GPIO.LOW)#设置pwm引脚和频率为2000hzpwm_LeftSpeed = GPIO.PWM(LeftSpeed, 2000)pwm_RightSpeed = GPIO.PWM(RightSpeed, 2000)pwm_LeftSpeed.start(0)pwm_RightSpeed.start(0)#⼩车前进def run(delaytime):GPIO.output(LeftIn1, GPIO.HIGH)GPIO.output(LeftIn2, GPIO.LOW)GPIO.output(RightIn1, GPIO.HIGH)GPIO.output(RightIn2, GPIO.LOW)pwm_LeftSpeed.ChangeDutyCycle(80)pwm_RightSpeed.ChangeDutyCycle(80)time.sleep(delaytime)#⼩车后退def back(delaytime):GPIO.output(LeftIn1, GPIO.LOW)GPIO.output(LeftIn2, GPIO.HIGH)GPIO.output(RightIn1, GPIO.LOW)GPIO.output(RightIn2, GPIO.HIGH)pwm_LeftSpeed.ChangeDutyCycle(80)pwm_RightSpeed.ChangeDutyCycle(80)time.sleep(delaytime)#⼩车左转def left(delaytime):GPIO.output(LeftIn1, GPIO.LOW)GPIO.output(LeftIn2, GPIO.LOW)GPIO.output(RightIn1, GPIO.HIGH)GPIO.output(RightIn2, GPIO.LOW)pwm_LeftSpeed.ChangeDutyCycle(80)pwm_RightSpeed.ChangeDutyCycle(80)time.sleep(delaytime)#⼩车右转def right(delaytime):GPIO.output(LeftIn1, GPIO.HIGH)GPIO.output(LeftIn2, GPIO.LOW)GPIO.output(RightIn1, GPIO.LOW)GPIO.output(RightIn2, GPIO.LOW)pwm_LeftSpeed.ChangeDutyCycle(80)pwm_RightSpeed.ChangeDutyCycle(80)time.sleep(delaytime)#⼩车原地左转def spin_left(delaytime):GPIO.output(LeftIn1, GPIO.LOW)GPIO.output(LeftIn2, GPIO.HIGH)GPIO.output(RightIn1, GPIO.HIGH)GPIO.output(RightIn2, GPIO.LOW)pwm_LeftSpeed.ChangeDutyCycle(80)pwm_RightSpeed.ChangeDutyCycle(80)time.sleep(delaytime)#⼩车原地右转def spin_right(delaytime):GPIO.output(LeftIn1, GPIO.HIGH)GPIO.output(LeftIn2, GPIO.LOW)GPIO.output(RightIn1, GPIO.LOW)GPIO.output(RightIn2, GPIO.HIGH)pwm_LeftSpeed.ChangeDutyCycle(80)pwm_RightSpeed.ChangeDutyCycle(80)time.sleep(delaytime)#⼩车停⽌def brake(delaytime):GPIO.output(LeftIn1, GPIO.LOW)GPIO.output(LeftIn2, GPIO.LOW)GPIO.output(RightIn1, GPIO.LOW)GPIO.output(RightIn2, GPIO.LOW)pwm_LeftSpeed.ChangeDutyCycle(80)pwm_RightSpeed.ChangeDutyCycle(80)time.sleep(delaytime)摄像头控制有两部分,⼀是拍摄、⼆是云台转动。
5.智能小车-按键控制小车的启动
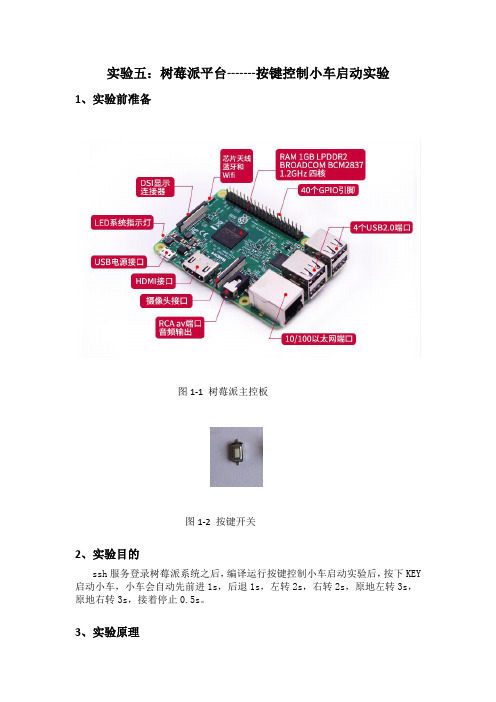
实验五:树莓派平台-------按键控制小车启动实验1、实验前准备图1-1 树莓派主控板图1-2 按键开关2、实验目的ssh服务登录树莓派系统之后,编译运行按键控制小车启动实验后,按下KEY 启动小车,小车会自动先前进1s,后退1s,左转2s,右转2s,原地左转3s,原地右转3s,接着停止0.5s。
3、实验原理按键消抖:通常我们的按键开关一般都是机械弹性开关,当机械触点断开,闭合时,由于机械触点的弹性作用,一个按键开关子在闭合时不会马上就能稳定的接通,在断开时也不会一下子彻底断开,而是在闭合和断开时会伴随着一连串的抖动。
图3-1 按键抖动状态图抖动时间一般都是由按键的机械特性决定的,一般都会在10ms以内,为了确保程序对按键的一次闭合后一次断开只响应一次,必须进行按键的消抖处理,有硬件消抖和软件消抖。
其中,软件消抖指的是检测出键闭合后执行一个延时程序,产生5ms~10ms 的延时,让前沿抖动消失后再一次检测键的状态,如果仍保持闭合状态电平,则确认为真正有键按下。
当检测到按键释放后,也要给5ms~10ms的延时,待后沿抖动消失后才能转入该键的处理程序。
硬件消抖是在开关两段接一个0.1uf的电容。
本次实验我们采取的是软件延时去抖。
4、实验步骤4-1.看懂原理图图4-1 树莓派主控板电路图图4-2 按键图4-3 树莓派40pin引脚对照表4-2 由电路原理图可知按键是直接连接到主控板上的wiringPi编码的10口。
我们设置10口为输入模式,并当按下按键时通过检测该引脚的电平状态,来判断按键是否被按下。
4-3 程序代码如下:输入:gcc KeyScanStart.c -o KeyScanStart -lwiringPi -lpthread ./KeyScanStart接着./initpin.sh初始化引脚。
基于51单片机WiFi智能小车制作
基于51单片机WiFi智能小车制作基于51单片机WiFi智能小车制作一、基本原理51单片机WiFi智能小车是利用PC或手机作为控制端,通过手机连接wifi模块(路由器)以获得wifi信号,同时车载也连接wifi模块以获得和手机相同的IP地址,实现手机和小车的连接,然后利用PC或手机上的控制软件以wifi网络信号为载体发送相关信号,wifi模块接收PC 或手机端发送来的相关信号并分析转换成TTL 电平信号,然后发送给单片机,单片机接收到的电平信号处理、分析、计算,转化成控制指令并发送给电机驱动模块以实现小车的前进、后退、左拐、右拐等功能。
二、购买所需材料了解51单片机WiFi智能小车基本原理后,需要购买所需材料进行制作。
下面列出所需制作材料:序号材料备注图例6 小车底盘7 摄像头 根据固件支持摄像头购买8 电源根据自己需要购买种类9 杜邦线及小配件制作所需工具:序号工具名备注图例称1 电烙铁一套 包括松香焊锡2 螺丝刀 平口、十字等3 微型电钻 可以自制4手工刀5 剪刀6 万用表7 热熔胶枪或快干胶8US B下载器三、开始制作1、制作流程开始制作前,我们首先需要看购买路由器的型号,笔者采用的是703n 路由器,所以需要引出ttl 线。
总体步骤为:路由器引TTL 线→路由器刷OpenWrt 固件→制作51单片机最小系统→下载下位机程序到51单片机→安装上位机程序至PC 或手机→测试上、下位机通信→组装→调试完成。
2、路由器引ttl线首先打开703n路由器,按照下图标示位置焊接ttl线。
注意:1、焊接的时候要小心焊接,焊好后微拉下查看松紧2、焊接最好采用软线焊接,防止意外整块拉掉焊点3、焊好后一定用胶固定,最好采用热熔胶下图为引好ttl线样子3 刷OpenWrt固件何为OpenWrt固件,OpenWrt可以被描述为一个嵌入式的Linux 发行版,(主流路由器固件有dd-wrt,tomato,openwrt三类)而不是试图建立一个单一的,静态的系统。
1.智能小车-七彩探照灯实验
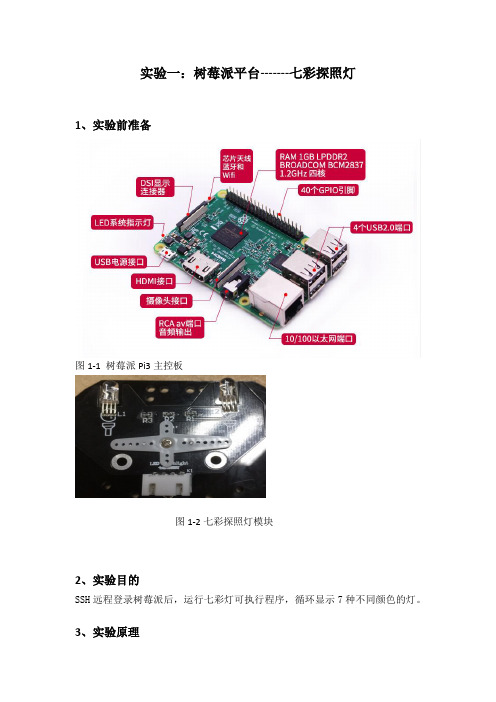
实验一:树莓派平台-------七彩探照灯1、实验前准备图1-1 树莓派Pi3主控板图1-2七彩探照灯模块2、实验目的SSH远程登录树莓派后,运行七彩灯可执行程序,循环显示7种不同颜色的灯。
3、实验原理树莓派的强大不仅在于它是一个卡式电脑,更重要的是引出的GPIO,可以通过编程使GPIO管脚输出高低电平。
所谓的RGB三色灯和普通的LED灯其实没有什么不同,只是在封装上,RGB 灯内封装了三个LED(红,绿,蓝),通过控制三种LED亮度(256种亮度级别可选),可以混合出不同的颜色(256*256*256)。
由电路原理图可知,本实验中采用的RGB LED灯是共阴LED,一个引脚接地,其余的三个RGB引脚分别接在树莓派主控板上的wiringPi编码3,2,5引脚上.同时每个LED灯需要串联一个220欧的电阻作为限流电阻,我们只需在树莓派主控板上控制相应的引脚为高电平,即可点亮相应的LED。
4、实验步骤4-1.看懂原理图图4-1 树莓派电路图图4-2 RGB LED灯图4-3 树莓派40PIN引脚对照表4-2 由电路原理图可以知道相应的连接电路,LED_R连接到主控板上的物理引脚15口对应的wiringPi编码的引脚为3,LED_G和LED_B分别接在主控板上的物理引脚为13和18口,对应于wiringPi编码的引脚为2,5。
(以后的代码中我们只会显示对应的wiringPi编码的引脚)LED_R--------- 3(wiringPi)LED_G--------- 2(wiringPi)LED_B--------- 5(wiringPi)注:我们在编写程序采用的是wiringPi库,有关这个库的详细情况,见树莓派软件与文档文件夹。
4-3 程序代码如下:编译之前先使用gpio readall查看引脚的模式和电平状态变化。
我们先在树莓派系统中编译该文件。
注意需要加上-lwiringPi 连接到库文件。
输入./ColorLED即可看到我们的七彩灯模块的led点亮了。
基于树莓派的智能小车控制系统设计
基于树莓派的智能小车控制系统设计智能小车控制系统已经成为现代科技的研究热点之一。
它使得机器人具有更好的自主感知和行为决策能力,为人类生产和生活提供了更多便利和选择。
在这篇文章中,我们将探讨基于树莓派的智能小车控制系统的设计原理、实现方法以及其在实际应用方面的优势。
一、设计原理基于树莓派的智能小车控制系统的设计原理主要包括三个方面:感知模块、控制模块和决策模块。
1.感知模块感知模块主要是通过多种传感器来感知环境,包括红外线传感器、超声波传感器、摄像头和麦克风等。
通过收集和处理感知模块所得到的数据信息,可以实现对其所处环境的自主感知。
2.控制模块控制模块主要是根据感知模块所提供的数据信息,通过控制电机、舵机和灯光等组成的执行器来实现小车的运动控制、转向控制和灯光控制。
3.决策模块决策模块主要是通过分析感知模块所提供的数据信息,从而得出连续动作序列,完成运动控制、转向控制和灯光控制等行为决策。
二、实现方法基于树莓派的智能小车控制系统的实现方法主要包括硬件实现和软件实现两个方面。
1.硬件实现硬件实现主要包括小车的机械结构设计和电路设计。
机械结构设计需要满足小车运动的必要条件,保证小车在各种情况下的稳定性和安全性。
而电路设计则包括了电源管理、传感器接口设计、执行器控制和通信接口等电路部分。
树莓派板载GPIO(General Purpose Input Output)口提供了以电平信号为基础的输入输出接口,使用树莓派适配板将这些口映射到通用接口上,即可完成与各种硬件的连接。
2.软件实现软件实现主要包括操作系统安装、驱动程序编写和应用程序开发等方面。
在树莓派上,可以安装常用的操作系统,如Raspbian 等,针对赛车所用的传感器与执行器设备编写驱动程序,并根据实际需求使用Python等编程语言进行应用程序开发。
三、实际应用基于树莓派的智能小车控制系统在现实中已经有了广泛的应用。
例如,可以用于智能家居场景中的清洁机器人、智能物流配送中的 AGV 等。
10.智能小车-超声波避障实验
实验十:树莓派平台-------超声波避障实验1、实验前准备图1-1 树莓派主控板图1-2 超声波模块2、实验目的SSH服务登录树莓派系统之后,编译运行超声波避障可执行程序后,按下启动按键K2,启动超声波避障功能,当前方有障碍物时则相应的转向避障。
3、实验原理超声波模块是利用超声波特性检测距离的传感器。
其带有两个超声波探头,分别用作发射和接收超声波。
其测量的范围是3-450cm。
图3-1 超声波发射和接收示意图图3-2 超声波模块引脚该模块的工作原理:先使用树莓派的wiringPi编码引脚31向TRIG脚输入至少10us的高电平信号,触发超声波模块的测距功能。
如下图3-3所示:图3-3 超声波模块发送触发信号测距功能触发后,模块将自动发出 8 个 40kHz 的超声波脉冲,并自动检测是否有信号返回,这一步由模块内部自动完成。
一旦检测到有回波信号则ECHO引脚会输出高电平。
高电平持续的时间就是超声波从发射到返回的时间。
此时可以使用时间函数计算出echo引脚高电平的持续时间,即可计算出距被测物体的实际距离。
公式: 距离=高电平时间*声速(340M/S)/2。
4、实验步骤4-1.看懂原理图图4-1 树莓派主控板电路图4-2 超声波接线头图4-3树莓派40pin引脚对照表4-2 由电路原理图可知超声波的Trig引脚接在接在主控板上的wiringPi编码上的31口(SCL_C)上,而Echo接在主控板上的30口(SDA_C)上。
4-3 程序代码如下:输入:gcc avoid_ultrasonic.c -o avoid_ultrasonic -lwiringPi -lpthread ./avoid_ultrasonic接着另开一个终端./initpin.sh初始化引脚。
基于树莓派4B的循迹避障小车设计
基于树莓派4B的循迹避障小车设计
李文海;郭伟;宋莉
【期刊名称】《计算机与网络》
【年(卷),期】2022(48)19
【摘要】设计实现了一种基于树莓派4B的循迹避障智能小车系统,以快速、准确
地完成交通标识识别、避障、循迹任务作为研究目标。
智能小车利用LeNet网络
架构进行交通标识识别,超声波测距传感器进行避障决策,摄像头模组进行循迹行驶。
实验结果表明,智能小车能够在实际搭建的环境下,完成交通标识识别、避障、循迹
的任务,且具有准确率高、稳定性好、泛化能力强的特点。
【总页数】5页(P53-57)
【作者】李文海;郭伟;宋莉
【作者单位】马鞍山学院人工智能创新学院
【正文语种】中文
【中图分类】TP393
【相关文献】
1.基于树莓派的智能预警避障小车设计
2.基于树莓派的自动避障小车的设计与实现
3.基于树莓派的自动避障小车的设计与实现
4.基于STM32的智能小车循迹避障测距的设计
5.基于STM32的循迹避障小车设计
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
出厂首次测试 前言 智能小车设计原理 智能小车分模块设计
出厂首次测试
出厂首次测试
蓝牙控制小车
第一步:打开下载好的“亚博智能4WD”app软件,然后打开 我们手机的蓝牙,进入到蓝牙配对界面
第二步:配对成功之后自动进入小车操作界面,接下来, 我们就可以操作小车了。
智能小车设计原理
智能小车设计原理
树莓派wifi智能小车是利用PC或者手机作为控制端,通过手机 连接树莓派路由器以获取wifi信号,树莓派的底板通过排线与树 莓派主控板连接起来,树莓派的底板上就连接相应的外设。从 而实现手机和小车的无线连接。我们通过手机上的android软件
以wifi作为信息载体。通过socket套经接字济的性TCP协议进行通信,将 指来令的发指系送令统给,树并莓设派置路相由应器的G,P树IO莓口派,通以EC过实ON解现OMY析相. 相应关的的避手障机,发跟送随过,
树莓派智能小车原理框图
智能小车设计原理
模块简介
七彩灯模块 电机模块 超声波模块 红外避障寻光模块 四路寻迹模块
七彩灯模块
七彩灯模块
七彩探照灯模块
七彩灯模块
电机模块
电机模块
电机模块
超声波模块
超声波模块
超声波模块是利用超声波的
特性检测距离的传感器,其 带有两个超声波探头,分别 作为发射和接收超声波。其 测量的范围是0-500cm。
即可计算出实际的距离:距离=高电平时间*声速(340M/S)/2
红外避障寻光模块
红外避障寻光模块
目标管理 八大过程
企业经营战略为首,没有 战略就没有发展。目标管 理首要的是目标的制定, 而这个目标必须围绕战略 需要进行科学设定。从战 略到目标是一个从意图到 明确的过程,没有这个过 程,战略只能是一种意图 、只能是一种打算,在一 定程度上没有目标支撑的 战略也只能是设想。
巡线S,YST寻EMA光TICN,ESS灭. 火,点灯等功能。同时,我们树莓派路由器上 连接上了usb摄像头,获取摄像头所采集的图像信息数据实时的 通过wifi发送给我们的上位机或者手机,最后我们就可以通过手 机控制小车和完成远程监控。
智能小车设计原理
有效性\Vaidity 适应性\Adaptability
root用户登录的密码为yahboom
前言
前言
目前,wifi技术得到了空前广泛的应用,人们的 日常生活也离不开wifi。使用我们WIFI的产品也 是非常多,目前最常用的就是我们的手机。基 于Andorid和苹果的WIFI智能小车具有远程监控、 自由移动等特性,具有非常流行的特色,能够 运用到一些实际的生产之后,满足一定的社会 需求,而我们本次采用的也是基于wifi技术的树 莓派智能小车。
出厂首次测试
TCP控制小车
第一步:树莓派wifi智能小车出厂时已经配置成路由模式了, 用户只需用手机连上树莓派wifi。 wifi名字:YahBoom_Car 密码:12345678 第二步:打开下载好的“亚博智能4WD”app软件,进入到树 莓派控制界面: 输入树莓派ip地址: http://192.168.0.1:8080/?action=snapshot 树莓派端口号: 8888 第三步:点击树莓派控制即可进入实时控制界面。 注:配置好了树莓派的用户名pi密码为yahboom
添加标题
4路寻迹赛道
2.寻光方面:光敏电阻器是利用半导体的光电导效应制成的一种电阻值随入射光的强弱而 改变的电阻器,又称为光电导探测器;入射光强,电阻减小,入射光弱,电阻增大。我们通 过光敏电阻连接到主控板上的引脚的电平变化来决定是否有光。从而让小车做出相应路寻迹模块
红外避障寻光模块
红外避障寻光模块: 1.红外避障方面:该传感器具有一对红外发射管与接收管,发射管发射一定频率的红外线
在一定的范围内,如果没有障碍物,发射出去的红外线,会因传播的距离越来越远而逐渐减 弱,最后消失。如果前方有障碍物,红外线反射回来后会被接收管所接收。我们通过检测相 关引脚的电平状态,让小车做出相应的动作。
超声波模块
超声波发射和接收示意图
超声波模块引脚
超声波原理:先向超声波Trig引脚输入至少10us的高电平信号,触发超声波模块的测距功能。 接着Trig引脚会自动发出8个40khz的超声波脉冲,并自动将Echo脚的电平拉高,一旦检测到
B C D 回波信号则将Echo脚的电平拉低。高电平持续的时间就是超声波从发射到返回的时间。此时