机械设计传动系统设计
机械传动系统方案设计

目旳:获得新旳机构或特性,已满足使用规定。
1)变化构件构造形状
若将摆动导杆机构中旳直线导 槽改为圆弧导槽,运动到左侧 时,可获得较长时间旳停歇。
中南大学专用
潘存云专家
2)变化构件运动尺寸 槽轮直径变为无穷大,槽数无穷多时,
槽条机构
3)选不一样旳构件作为机 架
----3机构旳倒置 3
2
2
1
曲柄滑块机构
往复运动
连杆机构 凸轮机构 螺旋机构
正弦机构 正切机构 六连杆机构
齿轮齿条机构
组合机构
液压缸、气缸
螺旋机构旳特点:可获得大旳减速比和较高旳运动精 度,常用作低速进给和精密微调机构。
齿轮齿条机构旳特点:合用于移动速度较高旳场所, 精密齿条制造困难,传动精度及平稳性不及螺旋机构。
中南大学专用
机械传动系统旳作用就是将原动机旳运动和动力传递到执行构件,故原动机旳类型和执行构件旳运动形式、运动参数、运动方位等
执行构件的数目 都决定了传动系统旳方案。执行构件旳运动设计和原动机旳选择,就是根据确定旳工作原理和工艺动作过程,确定执行构件旳数目、
运动形式、运动参数、运动协调关系,并选择合适旳原动机旳类型和运动参数与之相配。
中南大学专用
潘存云专家
B
A
C
D
潘存云专家
E
搅拌机构
齿轮----连杆组合机构
中南大学专用
凸轮----连杆组合机构
联动凸轮机构
潘存云专家
二、机构旳变异 构件构造形状 运动尺寸 更换机架 或原动件
增长辅助构件
当所选机构不能满足机械提出旳运动和动力规定期,或者为了改 善所选机构旳性能或构造时,可以通过变化机构中某些构件构造 形状、运动尺寸、更换机架或原动件、增长辅助构件等措施获得 新旳机构或特性。此称为机构旳变异
《机械传动系统设计》课件

链传动的类型
根据链条的结构和用途,链传动可分 为滚子链、齿形链等类型。
链传动的特点
链传动具有结构简单、传动效率高、 耐冲击等优点,但也有噪声较大、链 条磨损较严重等缺点。
链传动的应用
链传动广泛应用于需要承受较大载荷 和冲击的场合,如摩托车、自行车等 。
04
机械传动系统的优化与改进
提高传动效率
优化齿轮设计
异常噪音和振动检测
定期监测齿轮的运行状态,发现异常噪音或 振动应及时排查原因并处理。
带传动的维护与保养
皮带张紧度调整
定期检查皮带的张紧度,保持适当的张紧以 减少皮带打滑或磨损。
皮带检查
定期检查皮带的表面,发现磨损或损伤应及 时修复或更换。
滑轮检查
定期检查皮带的滑轮,确保其转动灵活,无 卡滞现象。
异常噪音和振动检测
02
机械传动系统设计基础
齿轮设计
01
02
03
齿轮类型
直齿、斜齿、锥齿等,根 据传动需求选择合适的类 型。
齿轮材料
选择耐磨、耐冲击、耐高 温的材料,如铸钢、锻钢 、铜合金等。
齿轮精度
根据传动要求确定齿轮精 度等级,确保传动的平稳 性和准确性。
带传动设计
带类型
平带、V带、多楔带等,根据工作条件选择合适的 带类型。
定期监测链条的运行状态,发现异常噪音或振动应及时排查原因并处理。
THANKS
感谢观看
机械传动的应用
工业领域
机械传动系统广泛应用于各种工业领 域,如汽车、航空、船舶、能源等, 是实现机械设备运动和转矩传递的关 键部件。
农业领域
军事领域
在军事领域,坦克、装甲车等武器装 备的传动系统对于提高武器性能和战 斗力具有重要意义。
14机械传动系统的方案设计
⑷ 再现轨迹的机构
再现轨迹 机构
连杆机构 齿轮—连杆组合机构 凸轮—连杆组合机构 联动凸轮机构
一般而言,除了凸轮机构能实现精确的曲线轨迹之外, 其它机构都只能近似实现预定的曲线轨迹。
C E
BA D
搅拌机构
齿轮—连杆组合机构
联动凸轮机构
凸轮—连杆组合机构
此抓片机构采用了联动凸轮 机构,通过两凸轮的联动作用, 使抓片爪按矩形轨迹运动,从而 达到间歇抓片的目的。
冲制
退回
确定方案时应注意两点 ⑴ 用最简单的方法实现 同一功能。
⑵ 注意光、机、电、流 体等知识的综合运用。
用最简单的方法实现功能举例
图示按摩椅中的按摩轮利用一 个偏心空间凸轮,同时实现三维方 向的按摩作用—径向振动挤压、向 下推拉和横向推拉,构思巧妙,结 构非常简单。
按摩轮 r B
光、机、电、流体等知识的综 合运用举例
传动比不准确、传递功率小、效率低。
⑵ 实现单向间歇转动的机构 槽轮机构 适用于转角固定的转位运动
单向间歇 转动机构
棘轮机构 每次转角小,或转角大小可调的低速场合
不完全齿轮机构 大转角而速度不高的场合
运动平稳、分度、定位准确,
凸轮式间歇运动机构 但制造困难、高精度定位、高
速场合
齿轮--连杆机构 特殊要求的输送机构
执行构件动作的协调配合
● 送料机构将原料送入模孔上方后,冲头进入模孔进行冲压 ● 冲头上移一段距离后,进行下次送料动作
折叠包装机构的两个执行构件
两个构件不能同时位于区 域MAB中,以免干涉。
左右折折边构构件件 包包装装纸纸 右右折折边边构构件件
M
B
333A3
111
饼饼干干
机械传动系统的设计与优化
机械传动系统的设计与优化机械传动系统在各行各业中起着至关重要的作用。
它们将动力从一个地方传递到另一个地方,并将旋转运动转换为线性运动或其他所需的运动形式。
因此,设计和优化机械传动系统非常重要,以确保其高效、可靠和经济。
一、机械传动系统的基本原理机械传动系统由传动装置、传动介质和输出装置组成。
传动装置用于将力和运动从一个部件传送到另一个部件,传动介质通常是齿轮、皮带、链条等,用于实现力和运动的传递,输出装置用于将传递的力和运动转换为所需的运动形式。
在机械传动系统中,齿轮是最常用的传动介质之一,因为它们可以传递大扭矩和高速比。
齿轮传动的设计需要考虑齿轮的齿数、模数、齿宽等参数,以及齿轮的材料和硬度。
此外,还需要注意齿轮的配合间隙和润滑问题,以确保传动的平稳和可靠。
二、机械传动系统的设计步骤1. 确定传动需求:首先需要明确机械传动系统的传动比、传递功率和速度要求等。
根据不同的应用需求,选择合适的传动方式和传动介质。
2. 零部件选型:根据传动需求,选择合适的传动零部件,如齿轮、链条等。
对于齿轮传动,需要根据传动比和所需扭矩选择合适的齿轮参数,如齿数、模数等。
3. 连接方式设计:根据传动零部件的选型,设计合适的连接方式,如轴的设计、轴承选型和连接装置的设计等。
确保传动零部件的正确定位和安装。
4. 强度校核:对设计的传动系统进行强度校核,确保传动零部件和连接装置具有足够的强度和刚度,以承受所需的载荷和运动。
5. 润滑设计:设计合适的润滑系统,为传动零部件提供充足的润滑和冷却,以减少磨损和延长零部件的使用寿命。
6. 优化设计:根据实际情况,对传动系统进行优化设计。
可以通过改变传动比、增加传动零件的强度或减小传动零件的质量等方式,提高传动系统的效率和可靠性。
三、机械传动系统的优化方法1. 材料优化:选择合适的材料,以提高传动零件的强度和刚度。
同时,考虑材料的耐磨性和耐蚀性,以增加传动系统的寿命。
2. 减少摩擦损失:采用润滑剂、改善配合间隙和表面光洁度等方式,减少摩擦损失,提高传动系统的效率。
机械设计基础传动系统和机构设计
机械设计基础传动系统和机构设计机械设计基础:传动系统和机构设计在机械设计中,传动系统和机构设计是非常重要的部分。
传动系统是指将动力从一个地方传输到另一个地方的机制,而机构设计则是指用于实现特定功能的装置或结构。
一、传动系统的基本原理传动系统主要用于将动力从一个设备传递到另一个设备,以实现所需的运动或力的转换。
常见的传动系统包括齿轮传动、皮带传动和链传动等。
1. 齿轮传动齿轮传动是一种常见的机械传动方式,其主要通过两个或多个齿轮的啮合来传递动力。
不同大小的齿轮之间的传动比决定了输出轴的转速和扭矩。
2. 皮带传动皮带传动采用皮带与轮齿啮合的方式传递动力。
与齿轮传动相比,皮带传动可实现更大的传动比,且运行平稳。
3. 链传动链传动利用链条与齿轮或链轮的啮合来传递动力。
链传动具有较大的传动比和较高的传动效率,常用于高负载或高速的传动系统中。
二、机构设计的基本原理机构设计涉及到将多个零部件组合起来以实现特定的功能。
在设计机构时,需要考虑运动要求、结构强度和稳定性等因素。
1. 运动要求机构设计的首要考虑因素是实现所需的运动类型,例如旋转、直线运动或摆动。
通过选择合适的连杆、曲柄轴和齿轮等组件,可以实现不同类型的运动。
2. 结构强度机构设计中的结构强度是确保机构能够承受所需负载并保持稳定运行的重要因素。
在选择材料和尺寸时,需要考虑到材料的强度、刚度和耐磨性等因素。
3. 稳定性机构设计时需要保证结构的稳定性,以防止振动、共振和其他不稳定现象的发生。
通过添加减振装置、调整结构刚度和使用合适的润滑剂等方法可以提高稳定性。
三、机械设计的案例研究为了更好地理解机械传动系统和机构设计的原理,以下是一个案例研究:假设我们需要设计一种用于升降货物的传动系统和机构。
我们需要实现以下功能:通过电动机将动力传递给升降装置,使其能够顺利升降货物。
首先,我们选择合适的传动方式。
考虑到需要较大的传动比和较高的传动效率,我们选择齿轮传动作为传动方式。
机械制造装备设计课程设计-机床主传动系统设计
nm in
nj
n nmax
机械制造装备设计课程设计--机床主传动系统设计
计算转速的确定 (1)等比传动,中型通用机床(C6132、C6140)
z 1
nj nmin 3
(2)等比传动,大型通用机床
z
nj nmin 3
总级数
机床类
9
中型
n3
大型
n4
12
16
18 20
n4
n5
n6
n7
n5
机床 C6140 C6132
功率(KW)
7.5 3.0
机床 Z3040 Z3063
功率(KW) 机床
3.0
X62、63
5.5
X63W
功率(KW) 7.5 10.0
机械制造装备设计课程设计--机床主传动系统设计
2. 主轴的估算
在设计之初,由于确定的仅仅是一个设计方案,具体构造尚 未确定,因此,只能根据统计资料,初步确定出主轴的直径。
4、编写设计计算说明书 主要包括: 1)运动设计和动力计算的计算过程和分析; 2)结构设计说明(包括主要结构的分析以及其他需要说明 或论证的问题); 3)参考文献
机械制造装备设计课程设计--机床主传动系统设计
四、课程设计的步骤和注意事项
1、准备工作 2、运动设计
① 传动方案设计(集中传动或分离式传动); ② 结构式; ③ 绘制转速图; ④ 确定齿轮齿数; ⑤ 绘制传动系统图; ⑥ 带和带轮的设计计算;
lg
Rn :变速范围
Rn
n max n min
例:已知 n45~20r0p0m 1.41
z lR g n 1 lg 2( 0 4 0 ) 5 1 0 1.9 0 8 1 1.9 1 8 12
《机械设计基础》第十六章 机械传动系统设计
P T 9550 n
机械设计基础
3.传动比
传动比反映了机械传动增速或减速的能力。一般情况下,传动装 置均为减速运动。在摩擦传动中,V带传动可达到的传动比最大,平 带传动次之,然后是摩擦轮传动。在啮合传动中,就一对啮合传动而 言,蜗杆传动可达到的传动比最大,其次是齿轮传动和链传动。
4.功率损耗和传动效率
《机械设计基础》
机械设计基础
第十六章 机械传动系统设计
16.1 传动系统的功能与分类 16.1.1 传动机构的功能 1.变速:通过实现变速传动,以满足工作机的变速要求; 2.传递动力:把原动机输入的转矩变换为工作机所需要的转 矩或力; 3.改变运动形式:把原动机输入的等速旋转运动,转变为工 作机所需要的各种运动规律变化,实现运动运动形式的转换; 4.实现运动的合成与分解:实现由一个或多个原动机驱动若 干个相同或不同速度的工作机; 5.作为工作机与原动机的桥梁:由于受机体外形、尺寸的限 制,或为了安全和操作方便,工作机不易与原动机直接连接时, 也需要用传动装置来连接。 6.实现某些操纵控制功能:如起停、离合、制动或换向等。 机械设计基础
nd i nr
2.选择机械传动类型和拟定总体布置方案
根据机器的功能要求、结构要求、空间位置、工艺性能、总传 动比及其他限制性条件,选择传动系统所需的传动类型,并拟定 从原动机到工作机的传动系统的总体布置方案。
3.分配总传动比
根据传动方案的设计要求,将总传动比分配分配到各级传动。
4.计算机械传动系统的性能参数
(3)传动比范围
不用类型的传动装置,最大单级传动比差别较大。当采用多级传动时,应合理安排传 动的次序。
(4)布局与结构尺寸
对于平行轴之间的传动,宜采用圆柱齿轮传动、带传动、链传动;对于相交轴之间 的传动,可采用锥齿轮或圆锥摩擦轮传动;对于交轴之间的传动,可采用蜗杆传动或 交错轴齿轮传动。两轴相距较远时可采用带传动、链传动;反之采用齿轮传动。
机械设计中的齿轮传动系统设计
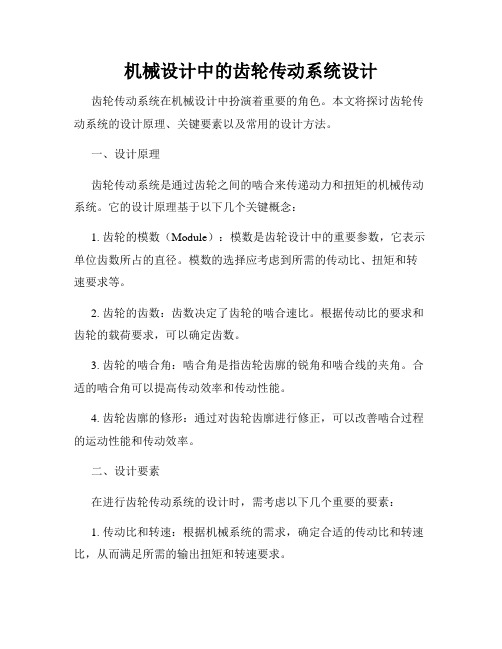
机械设计中的齿轮传动系统设计齿轮传动系统在机械设计中扮演着重要的角色。
本文将探讨齿轮传动系统的设计原理、关键要素以及常用的设计方法。
一、设计原理齿轮传动系统是通过齿轮之间的啮合来传递动力和扭矩的机械传动系统。
它的设计原理基于以下几个关键概念:1. 齿轮的模数(Module):模数是齿轮设计中的重要参数,它表示单位齿数所占的直径。
模数的选择应考虑到所需的传动比、扭矩和转速要求等。
2. 齿轮的齿数:齿数决定了齿轮的啮合速比。
根据传动比的要求和齿轮的载荷要求,可以确定齿数。
3. 齿轮的啮合角:啮合角是指齿轮齿廓的锐角和啮合线的夹角。
合适的啮合角可以提高传动效率和传动性能。
4. 齿轮齿廓的修形:通过对齿轮齿廓进行修正,可以改善啮合过程的运动性能和传动效率。
二、设计要素在进行齿轮传动系统的设计时,需考虑以下几个重要的要素:1. 传动比和转速:根据机械系统的需求,确定合适的传动比和转速比,从而满足所需的输出扭矩和转速要求。
2. 动力传递和承载能力:根据工作条件和载荷要求,选择合适的齿轮材料和热处理工艺,确保齿轮传动系统能承受所需的载荷和传递所需的动力。
3. 齿轮啮合的几何要求:通过几何参数的选择,确保齿轮啮合过程的顺利进行,同时避免齿轮齿面的过度磨损和损坏。
4. 齿轮传动的噪声和振动控制:通过合理的齿轮设计和优化,减少齿轮传动过程中产生的噪声和振动,提高传动系统的运行平稳性和寿命。
三、设计方法在实际的齿轮传动系统设计过程中,可以采用以下几种常用的设计方法:1. 标准化设计:根据已有的标准齿轮模型和参数,选择合适的齿轮尺寸和几何参数,简化设计过程,提高效率。
2. 计算机辅助设计:借助计算机辅助设计软件,进行齿轮传动系统的三维建模和力学分析,快速得到设计结果。
3. 优化设计:通过设计参数的优化选择,使齿轮传动系统满足最佳的传动性能和经济指标。
4. 实验验证:设计完成后,进行实验验证,测试齿轮传动系统的性能和可靠性,发现潜在问题并进行改进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汕头大学工学院二级项目报告(第三阶段)项目名称:机械传动设计项目题目:机械臂带传动设计指导教师:系别:机电系专业:机械设计制造及其自动化姓名:组长:XXX成员:X X XXX XXX XXXXXX XXX XXX XXX阶段时间: 2009 年12 月 04 日至 12 月 15 日成绩:评阅人:传动系统的设计一、设计题目块状物抓取搬运是流水线等工作场合中时常所需的流程之一。
机械臂可以在较高程度上满足这一要求,现即须设计一机械臂关节的传动系统。
该系统的传动过程如下,电机为动力源,通过一对齿轮减速后,再由一条同步带将动力传至该机械臂某一关节处。
该电机可以通过正反转的控制来实现关节处的正反转控制。
二、原始数据与设计要求1)动力源为电机,具有快速响应,精确步进等特点2)机构具有较稳定的传动比3)关节处实现90度转动的时间不超过5秒钟4)同步带的传动距离为200~300mm5)传动系统输出端力矩至少达到10N*M部分参数值估算如下:6)关节所属的一截机械臂重量为1kg,长度为300mm,7)关节转速为W=30度/秒三、总体设计(1)机械工作原理本机械臂由步进电机的驱动带传动。
机械臂由底座、支架、三组运动臂动臂(图一)及功能手(夹取模块,图二)组成。
图一图二(2)运动原理图如下图所示,电机1的转动通过齿轮1把力矩传给齿轮2,齿轮2通过键传动带动大臂的上下摆动。
电机2的转动通过带轮1(带轮1与齿轮4紧固连接,与大臂轴是间隙连接)把转矩传给带轮2,从而带动小臂的运动。
.(3)机械工作循环图1)机械循环如图 机械臂初始角度为0,转动范围为2ψ。
现取ψ为45度。
2)工作路线简述如下: 机械臂主要是抓取一个小物品,首先臂在平衡位置,工作时,往下偏移一个ψ角度,然后回到平衡位置,再放到正ψ角度,最后回到原位置。
3)循环工作图如下4)臂位移与角度的关系据两点间距离公式222()x r y l -+=,其中X 为臂上端点的横坐标,Y 为纵坐标,r 为臂长,l 为端点位移,可得位移是条圆弧故得位移与角度间的循环图,如下:四、技术设计(1)传动带设计电机额定功率P=12*0.6=7.2W,P1=0.9*7.2=6.48W,转速n1=14r/min,i=1.4,每天额定工作时间t=5h。
1)确定计算功率Pca,查表3-5,得工作情况系数 K A=1.0P ca=P*K A=0.00648KW2)选择带型,选取普通V带Y型3)确定带轮基准直径查表3-2和3-9,取主动轮基准直径 d1=35.5mm从动轮基准直径 d2=i*d1=1.4*35.5=50mm查表3-9,取标准从动轮直径 d2=50mm带速: V =(πd1n1)/(60*1000)=π*35.5*14/(60*100)=0.026m/s4)确定V型带基准长度及传动中心距据 0.7*(d1+d2)≤a0≤2*(d1+d2),得:59.85 ≤ a0≤171mm初步确定 a0 = 160mm基准带长度为 L0 = 2*a0+π*(d1+d2)/2+(d2-d1)2/(4*a0)= 2*160+π*(35.5+50)/2+(50-35.5) 2/(4*200)= 454.5mm由表3-7选带的基准长度Ld = 450mm,得:实际中心距 a = a0+(Ld-L0)/2= 160+(450-454.5)/2= 157.75mm5)验算主动轮上的包角α1,得α1 = 1800-(d2-d1)*57.30/a= 1800-(50-35.5)*57.30/157.75= 174.70>1200主动包角合适 6)计算普通V 型带根数ZZ = P ca /[P] = K A *P/(P0+△P0)Ka*K L查表3-3a ,3-4a ,得P0=0.04KW ,△P0=0.03KW查表3-6,K A =0.99,查表3-7,KL=0.96,故Z=0.52,取整,则Z=1 7)计算张紧力F 0查表3-1,有q = 0.02kg/mF 0 = 500* P ca*(2.5/ Ka-1)/Z*V+qV2= 500*0.00648(2.5/0.99-1)/(1*0.026)+0.02*0.0262= 190.1N 8)计算轴上的压力F QF Q = 2Z F 0sin(α1/2)= 2*1*190.1*sin(174.70/2) = 379.8N(2)齿轮设计1)选择齿轮材料:小齿:碳钢 200HBW σh1 = 420Mpa σf1=280Mpa 大齿:球墨铸铁 150HBW σh2 = 350Mpa σf2=90Mpa 查表6-3得安全系数 Shmin = 1.0,Sfmin=1.3 由图6-8a 查得接触寿命系数 Z1 = Z2 =1.25 弯曲寿命系数 Y1 = Y2 =1.8应力分析: [σh1] = (σh1/ Shmin) Z1=420*1.25/1.0=525Mpa[σh2] = (σh2/ Shmin) Z2=350*1.25/1.0=437.5Mpa [σf1] = (σf1/ Sfmin) Z1=280*1.8/1.3=387.7Mpa [σf2] = (σf2/ Sfmin) Z2=90*1.8/1.3=125Mpa2)按接触疲劳强度计算参数小齿轮分度圆直径其中u=i=2,661119.55*10/9.55*10*0.0072/144911T P n N===由表6-7查得K=1.3, KT 1=6385.9N.mm Z H =2.5查表6-8得Z E = 180.5Mpa 由表6-11查得dψ=1则代数求得d1=30.1mm 又由π1(1)/2(12)*30.1/245.2a u d mm=+=+=,取a=50mm按经验公式得模数m=(0.007~0.02)a,则取m=0.02a=1mm得齿数:12/(1)2*50/1*(12)35Z a m u =+=+=,270Z =验算a=m(35+70)/2=52.5,故符合要求 3)选精度因d1=Mz 1=1*35=35mm ,故齿轮圆周速度11/(60*1000) 3.14*35*14/600000.026/v d n m sπ===可用9级精度 4)精确计算载荷则,1*1.2*1.05*1.1 1.386A V K K K K K αβ===验算接触疲劳强度得验算弯曲疲劳强度,由图6-16得复合齿形系数为124.02, 3.93F F Y Y ==11/ 1.386*2*4911*4.02/35*3544.67[]280F t F F KFY bm MPa MPa σσ===<= 222/ 1.386*2*4911*3.93/35*3543.67[]90F t F F KFY bm MPa MPa σσ===<=符合要求最终得出齿轮的各项参数11.0;69 1.11*353566,/ 1.0*2*4911/(35*35)8.0.100., 1.2A V d A t K K b d mmK F b N mm N mm K αψ=-====-==<=查图得齿轮传动啮合宽度查表得故取319420H H Z Z MPa MPa σ===<,符合要求全齿高2.25 2.25齿顶圆直径Mz1+2ha=37 72齿根圆直径Mz1-2hf=32.2 67.5基圆Mz1cos20=32.88 65.77齿距p πm=3.14基圆齿距πm cos20=2.95齿厚p/2=1.57齿槽宽p/2=1.57顶隙C=0.25m=0.25中心距 a=50(3)轴的结构设计轴3:d=30 32 38 32 30 28 24 (轴承)齿轮轴承联轴器轴2:d=14 18 24 18 14轴承齿轮锥齿轮轴承轴1:d=10 14 24 18 14两个圆锥滚子轴承锥齿轮由图一可见,轴二上有三个直齿圆柱齿轮,两端有两个滚动轴承。
既承受弯矩,又承受扭矩,故属转轴类型。
1、按扭矩强度初步估计轴的最小直径 P=6.48W , n=14r/min查《机械设计教程》刘莹、吴宗泽 主编 表8-4得A 0=126~103mm n P A d 74.9~97.7141048.6103)~(126333=⨯=≥-考虑键槽对轴强度的影响,取d=9mm .选用45钢,正火硬度为170~217HBS.一、轴的总体设计信息如下:轴的编号:001 轴的名称:圆形截面阶梯轴轴的转向方式:单向脉动 轴的工作情况:淡水,无应力集中轴的转速:14r/min 功率:0.00648kW 转矩:4420.29N ·mm 所设计的轴是实心轴 材料牌号:45调质 硬度(HB):230 抗拉强度:650MPa 屈服点:360MPa弯曲疲劳极限:270MPa 扭转疲劳极限:155MPa许用静应力:260MPa 许用疲劳应力:180MPa二、确定轴的最小直径如下:所设计的轴是实心轴A值为:110 许用剪应力范围:30~40MPa最小直径的理论计算值:8.51mm 满足设计的最小轴径:9mm三、轴的结构造型如下:轴各段直径长度:长度直径11mm 17mm13mm 23mm16mm 20mm55mm 18mm10mm 17mm轴的总长度:105mm轴的段数:5轴段的载荷信息:直径距左端距离垂直面剪力垂直面弯矩水平面剪力水平面弯矩轴向扭矩23mm 12mm 379.8N 2278.8N·mm 0 0 020mm 32mm 1.105N 0N·mm 0.402N 11.05N·mm 4911N·mm18mm 67.5mm 379.8N 0N·mm 0N 3418.2N·mm 0N·mm 轴所受支撑的信息:直径距左端距离170mm 5.5mm17mm 100mm四、支反力计算距左端距离水平支反力Rh1 垂直支反力Rv15.5mm -36.56N -509.18N距左端距离水平支反力Rh2 垂直支反力Rv2100mm 36.17N -251.47N五、内力x/mm d/mm m1/N·mm m2/N·mm5.5 170 0 012 23 3318.17 1057.8732 20 3745.88 3743.0267.5 18 8473.96 8256.46100 17 2.94 2.94六、弯曲应力校核如下:危险截面的x坐标:99mm 直径:17mm危险截面的弯矩M:3.32N·mm 扭矩T:0N·mm截面的计算工作应力:0.01MPa 许用疲劳应力:180MPa 99mm处弯曲应力校核通过危险截面的x坐标:12mm 直径:23mm危险截面的弯矩M:3318.17N·mm 扭矩T:0N·mm截面的计算工作应力:2.73MPa 许用疲劳应力:180MPa 12mm处弯曲应力校核通过危险截面的x坐标:40mm 直径:20mm危险截面的弯矩M:4809.11N·mm 扭矩T:4911N·mm截面的计算工作应力:7.39MPa 许用疲劳应力:180MPa 40mm处弯曲应力校核通过危险截面的x坐标:95mm 直径:18mm危险截面的弯矩M:1268.42N·mm 扭矩T:0N·mm截面的计算工作应力:2.17MPa 许用疲劳应力:180MPa 95mm处弯曲应力校核通过结论:弯曲应力校核通过七、安全系数校核八、扭转刚度校核:圆轴的扭转角:0.033°,许用扭转变形:0.65°/m ,校核通过九、弯曲刚度校核如下:计算挠度x/mm νi/mm1 1.375 0.0104072 2.750 0.0069383 4.125 0.0034694 5.500 05 29.125 -0.0034696 52.750 -0.0057437 76.375 -0.0044948 100.00 09 101.250 0.00449410 102.500 0.00898811 103.750 0.013482许用挠度系数:0.0035,最大挠度:0.013482mm,弯曲刚度校核通过十、临界转速计算:当量直径dv:20.48mm轴截面的惯性距I:8635.54mm^4支承距离与L的比值:0.9轴所受的重力:350N支座形式系数λ1:12.15轴的一阶临界转速ncr1:24083.95r/min。