唐山松下YM-350KR2焊机电路分析
唐山松下YM500KR2焊机原理分析与维修
线圈中的电流不相等时, 才会产生磁通, 它才具有电感的作用从而使电流趋于平衡, 所以称 为平衡电抗器。
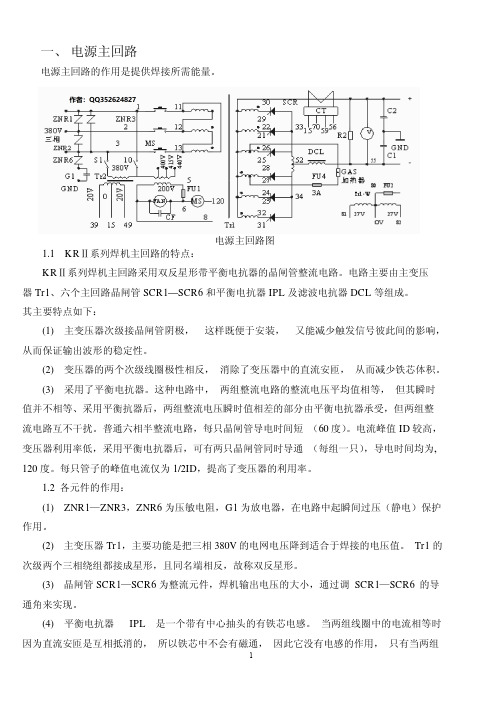
(5) 直流电抗器 DCL 可改善焊机输出特性,使电弧燃烧稳定。 (6) R2 为续流电阻,提供电流通路,保证晶闸管的维持电流。 (7) 电容 C1、C2 起滤除高频干扰作用。
二、程序控制电路
程序控制电路的核心是模块 IC1。 这个电路实现了收弧“有/无” 选择、 焊接控制, 提
2.8 起动电路 TS“ON”时,28 脚输出高电平。
7
(1)首先,这个电压经 D17、R51 使 QI4 导通,因此 CR1 动作,其常开点 CR1-1 吸合,使得 MS 吸合,主变压器开始供电。
(2)同时,这个电压又经缓冲器 IC20 的 4 脚开始输出: 第一路,经 D79 由 G 点输出到触发电路,使 PC15 导通,触发电路开始工作,从而主回路晶 闸管导通,输出焊接电压; 第二路, 输出到 D82 阴极, 使 D82 反向截止, +15V 经 R251 由 J 点输出到送丝控制电路, 送丝电路开始工作; 第三路,经 IC20(10)由 M 点输出到运算电路,使 QR5 导通,切断 FTT 控制电路。
这部分逻辑如下图所示:
2.5 节电电路 I.P.B“ON”时,PC9 导通,+15V 经 PC9 D16 D93 给电容 C9 充电。
TS“ON”状态时,28 脚电压经 IC20-5 脚
பைடு நூலகம்
4脚
D79
IC20
7脚 6脚
D14 给 C9 充电。
I.P.B 和 TS“OFF”时,C9 通 过 R50 D15 R51 R52
TS 再次“ON”时,IC5 的 6 脚和 7 脚都为高电平,所以其 3 脚输出为高电平,IC7 再次 转换,从而又转入收弧状态。
松下焊接资料
± 2) 伏= ( 36 ± 2) 伏
焊接电压对焊接效果的影响
电压偏高时 : 弧长变长, 飞溅颗粒变大 , 易产生气孔 . 焊道变宽, 熔深和余高变小 .
啪嗒!啪嗒!
母材
电压偏低时 : 焊丝插向母材 , 飞溅增加, 焊道变窄,熔深和余高大 .
嘭!嘭!嘭!
母材
焊接速度
在焊接电压和焊接电流一定的情况下: 焊接速度的选择决定了单位长度焊缝所吸收的热能量 (既:焊接线能量) . 焊接线能量 Q = I * U / t (J/mm)
…… 。
C02气保焊的特点
焊接速度快 单位时间内熔化焊丝比手工电弧
焊快一倍
引弧性能好 能量集中,引弧容易,连续送
丝电弧不中断。
焊接范围广 可适用低碳钢高强度 钢普通铸钢全方位焊
焊接效果
溶深大 熔深是手弧焊的三倍
, 坡口加工小。
焊接质量好 对铁锈不敏感,焊缝含氢量低 ,抗裂性能好,受热变形小,
溶敷效率高
400A
约1.5V 约2.5V 约3V 约4V
500A
约2V 约3V 约4V 约5V
焊接电压的设定
根据焊接条件选定相应板厚的焊接电流,然后根据下列公式计算焊接电压:
< 300A 时: 焊接电压 = ( 0.04 倍焊接电流 + 16 ± 1.5) 伏 >300A 时: 焊接电压 = ( 0.04 倍焊接电流 + 20 ± 2) 伏
3.2 mm 。主要用于低碳钢和低合金钢的焊接。 药芯焊丝因钢性较差,丝体较软,所以对送丝机构要求严格,既要降低送丝压力,
又要保证匀速送丝。
CO 2 气 体
作用:隔离空气并作为电弧的介质。 纯度:纯度要求大于 99.5%,含水量小于0.05%。 性质:无色,无味,无毒,是空气密度的1.5倍,比水轻。 存储:瓶装液态,每瓶内可装入(25 - 30)Kg液态CO2。 加热:气化过程中大量吸收热量,因此流量计必须加热。 容量:每公斤液态CO2可释放509升气体,一瓶液态二氧化
500kr系列CO2气体保护焊机维修指南设计

唐山松下产业机器有限公司
前言
唐山松下产业机器有限公司自成立至今已销售了几万台各种类型的焊机,深受广大用户的好评。为了便于广大用户更好地掌握唐山松下产品的正确使用、维护及修理,我们编写了这本教材,其中的内容着重为操作和维修人员服务,所以没有过多的理论陈述,而是以操作时的控制程序为基础,主要介绍了电路结构及故障检测。同时,根据敝公司技术服务人员的工作实践和焊接学校教师的授课经验,介绍了故障原因的分析方法和相关注意事项,相信对读者会有所帮助。本教材所提供的检测方法仅供参考,具体故障请结合实际情况仔细检查。由于时间及水平所限,对其中不足之处,敬请读者批评指正。
当气阀动作时烧P板上1A保险。
61(3)
开机后,有空载电压,有送丝,气阀动作。
T.S ON时,无空载电压,无送丝,气阀频繁动作。
——
开机后,有空载电压,有送丝,送丝速度异常,气阀动作。
开机后,有空载电压,有送丝,气阀动作。
67(4)
67、77、61三点短路时,开机后,有空载电压,有送丝,送丝速度异常,气阀动作。
(4)
(5)输入电源缺相。
(6)
(7)输入、输出电缆过细。
(8)
(9)输入、输出电缆连接不牢固。
(10)
(11)作业环境恶劣(如粉尘、油烟较大或有腐蚀性气体的场所)。
(12)
5.人为原因
6.
(1)超负载持续率使用。
(2)
(3)操作、保养不当(如移动送丝机时拉拽电缆、焊接时导电嘴未拧紧等等)。
(4)
(5)搬运过程中摔坏。
三、时序图:
1.无收弧:
2.
电
源
开
关
ON
焊
枪
开
铝合金焊接技术

逆变脉冲熔化极气体保护焊机的工艺特性1.引言:众所周知,脉冲电流熔化极气体保护焊是在一定平均电流下,焊接电源的输出电流以一定的频率和幅值变化来控制熔滴有节奏的过渡到熔池;可在平均电流小于临界电流值的条件下获得射流(射滴)过渡,稳定地实现一个脉冲过渡一个(或多个)熔滴的理想状态—熔滴过渡无飞溅。
并具有较宽的电流调节范围,适合板厚δ≥1.0mm工件的全位置焊接,尤其对那些热敏感性较强的材料,可有效地控制热输入量,改善接头性能。
由于脉冲电弧具有较强的熔池搅拌作用,可以改变熔池冶金性能,有利于消除气孔,未熔合等焊接缺陷。
唐山松下引进开发的YD-350/500AG2型逆变式脉冲电流熔化极气体保护焊机,是根据以上工艺要求精心设计的。
该机内置微电脑波形控制装置,实现了脉冲模式(脉冲焊接时的电流控制)和DIP模式(短路过渡时的电流波形控制)相组合的最佳匹配,可适用MIG/MAG/CO2气体保护焊,可焊接不锈钢、铝及铝合金、低合金钢、碳钢、铜和铜合金等金属材料。
2.微电脑焊接波形控制模式2.1“有”脉冲模式—微电脑专家系统控制电弧电压和平均焊接电流(送丝速度)的变化,自动调整脉冲频率以适应熔滴过渡的变化。
脉冲电流、基值电流、脉冲上升时间、脉冲下降时间和脉冲频率五项脉冲工艺参数自动寻找最佳工艺参数值,匹配组合成优化效果。
2.2“无”脉冲模式(波形控制模式)—在不选择脉冲电流焊接时,微电脑从400万种内置的焊接波形中选取最佳焊接条件,控制精度高,电弧稳定性强,最大程度地减少了焊接过程中的飞溅。
2.3 上述两种模式转换开关设在遥控盒上,便于操作。
2.4 当脉冲电流输出的时候如果发生短路(焊丝与母材)现象,在微电脑控制下优先使短路开放,然后再输出脉冲电流的控制方式如图一,使可控射流过渡更加平稳。
3. 三种焊接波形的最佳组合模式—由微电脑控制可建立软性、中性、硬性模式的电弧形态其波形如图二。
3.1软性模式电弧直径较大,其噪音小,飞溅少,电弧稳定性强。
YD-350AG2HGE

3.安装场所和电源设备
准备篇
■安装场所
■电源设备
电 源电 压
3 相 AC380V
设备容量
电源 发 电机
20kVA 40kVA 以上
输入保护 机器
熔 断器
无保险断路器 (或漏电保护器)
32A 32A(电动机用)
电缆 截 面积
焊接电源输入侧 焊接电源输出侧 接 地线
8mm2 以上 60mm2 以上 8 mm2 以上
8
5.连接............................................... 9
■焊接电源和配电箱...................... 9
■焊接电源和输出端.............. 10
■焊接电源和送丝装置.......... 11
■气体调节器的连接....................... 12
11.各种应用功能 ■外接信号的连接、使用..................39 ■外接端子的位置和连接方法..........39 ■遥控器、送丝装置插座
的连接............................ 42 ■机器人的连接................................ 43 ■选购品......................................44
微电脑焊接D波IP形P控U制L脉S E 冲-AMGIG2/MAG 焊 机
综合形式 YM-350AG2
YD-350AG2HGE
电源使用说明书
安装·准备·操作·技术资料篇
●非常感谢您购买了 Panasonic 产品。 ● 用前请仔细阅读本说明书并妥善保管,以备今后查阅。
微型交流电焊机电路与制作

微型交流电焊机电路与制作业余电子制作和维修过程中,通常会遇到焊接电池极片或薄钢板,而要确保顺利完成这一任务最好使用电焊机。
这里介绍的微型交流电焊机,由降压变压器、电流调节器和散热系统以及焊接导线、把手等附件组成。
焊接时不必使用电焊条,只需把欲焊接的器件分别作为电路的两个电极,利用接触电阻处产生的高温,将金属瞬间熔化,把器件牢牢焊接在一起。
图微型交流电焊机电路(点击看原图)电路工作原理如图所示,T2是降压变压器,也是电焊机的核心部件,8A整流桥、单向晶闸管VS、单结晶体管V、电阻R2、R3、R4、R5、电容C2及电位器RP构成了焊接电流无级调节器,直流电流表A用于间接指示焊接工作电流大小,R1与LED组成电源指示电路,小型变压器T1、1A整流桥、电容C1以及电机M构成了散热系统。
由图可见电路十分简洁,要说复杂就只能算是电流调节器了,它利用单结晶体管的负阻特性组成张弛振荡器,作为单向晶闸管的触发电路。
由于单结晶体管张弛振荡器的电源取自桥式整流电路输出的全波脉动直流电压,当晶闸管没有导通时,张弛振荡器的电容C2经R2、R5及RP充电,电容两端电压Vc2按指数规律上升,达到单结晶体管的峰点电压VP 时,单结晶体管V突然导通,基区电阻RBI急剧减小,电容C2通过PN结向电阻R4迅速放电,使R4两端电压Vg发生一个正跳变,形成陡峭的脉冲上升沿,随着电容C2的放电,Vc2按指数规律下降,当低于谷点电压Vv时,单结晶体管截止。
在R4两端输出的是尖顶触发脉冲,使得晶闸管VS导通,T2初级绕组内有交流电流流过,同时晶闸管两端压降变得很小,迫使张弛振荡器停止工作。
当交流电压过零瞬间,晶闸管被迫关断,张弛振荡器再次得电,电容C2又开始充电,这样周而复始不断重复上述过程。
调节电位器RP可以改变电容C2的充电时间,也就是改变张弛振荡器振荡周期,自然也就改变了每次交流电压过零后张弛振荡器发出第一个触发脉冲的时间,相应地改变了晶闸管VS的导通控制角,使加在T2初级绕组两端的电压发生变化,最终达到调节控制次级输出电流的目的。
松下KRⅡ系列CO2气体保护焊机常见故障的分析与维修
松下KRⅡ系列CO2气体保护焊机常见故障的分析与维修【摘要】本文介绍松下KRⅡ系列CO2焊机的各种常见故障的现象与分析和排除方法,故障检修的程序和检修时的注意事项,焊机正常的简易判断标准,以及维修经验心得体会。
【关键词】焊机故障分析排除方法心得体会1 引言伴随制造业的飞速发展和科学的进步,气体保护焊接已逐步取代传统的手弧焊,成为焊接中的主力军。
气体保护焊具有生产效率高、焊接成本低、能耗低、抗油锈能力强、适用不同厚度的板材焊接,变形小、无需清渣、电弧可见性良好、易于焊接等特点。
松下KRⅡ系列CO2焊机以其先进的控制技术、良好的焊接性能而广泛应用于公司各型产品的钢结构焊接中。
2 松下KRⅡ系列焊机的特点与主电路松下KRⅡ系列焊机主回路采用带平衡电抗器的双反,星形晶闸管整流电路。
电路主要由主变压器Tr1、六个主回路晶闸管SCR1—SCR6和平衡电抗器IPL及滤波电抗器DCL等组成。
其特点是:变压器次级有两组绕组都接星形,同名端相反,每组星形绕组接一个三相半波可控整流器,接入平衡电抗器后,由于其感应电动势的作用,使得变压器的两组星形绕组同时工作,互不干扰。
两组整流输出以180°相位差并联,这使两组整流各有一只晶闸管导通,并向负载供电,使得整个输出电流变大。
通过对晶闸管的控制,获得大小可调的工作电流。
其优点是输出电压脉动较小,变压器无直流磁化问题,利用率大为提高,对晶闸管的额定电流要求降低,满足了电焊机低电压大电流的要求。
3 松下KRⅡ焊机常见故障的分析与维修3.1 故障检修的程序:(1)第一步:调整送丝机遥控盒上的两个电位器,观察焊机的空载电压和送丝机的转速,根据焊机的空载电压和送丝机的转速是否受调确认故障现象。
(2)第二步:根据故障现象推断故障所在的范围。
(3)第三步:通过分析、检查、测试等手段找出故障点。
(4)第四步:用合格的部品更换损坏品或用其它手段排除故障。
3.2 检修时的注意事项:检修的目的是迅速准确地排除故障,尽快使焊机投入正常使用。
元器件分解图200KR

部品代号
备注
31
CO3
2芯插座
S100
气体调节器用
左侧面后面
YW-20/35KB3结构图
送丝机YW-20/35KB3结构图
YW-20/35KB3送丝机备件
№
部品名称
部件代号
备注
50
电位器
RV24YN20SB53
51
电位器
RV24YN20SA53
№
部品名称
部件代号
备注
50-1
电位器旋钮
K2901C
平垫
GB96D10X26
18
加压调整筒(组)
UJC01605/MNA05701
19
压簧
MBP01403-01
20
加压手柄
MMN00002
21
CC导嘴
MFC50107-04
22
螺栓
GB70M8X28T
23
六角螺栓
GB9074.17M8X12T
24
SUS导套帽
MGT01205-02
1.0~1.2
25
垫圈
部品名称
部品代号
备注
27
FAN
冷却风扇电机
SF-200-25-4D
27-1
风扇叶片
MUH250FAN
200KR/350KR
10
C1
电容
SH-DPY2.0UF
冷却风扇电机用
控制变压器
TSM05068
28
THp1
热继电器
67L085
晶闸管保护用Hale Waihona Puke 3、4IPL+DCL
电抗器(组)
TSM94295
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
U 相原理相同。
二、电流、电压控制与运算部分 1、给定焊接基准信号电路:(见图) 该电路是由 IC14A、C67、R169、R170、R171 等元件组成的振荡电路产生频率为 1KHz 的交流方波,此交流方波输出后,作为分波电压电流运算的基准信号。其工作过程是: IC14A 的 1 脚产生的交流信号电压,经电阻 R168、R291,由 67 点输出到焊接电压调节电 位器 VRV 和焊接电流调节电位器 VRA 上。
+15V
F
E
2、电压、电流运算电路: 该电路的作用是对不同的焊接规范及工作方式选择给出相应的控制电压,来控制输出 电压的大小和送丝电机的速度。电路是由多路转换器 IC7 和 IC19 运放 IC9、IC8 等组成。 该电路以分以下几部分。 (1)、焊接/收弧切换电路:由 E 点 F 点分别输出的电压基准信号和电流基准信号,N 点是由模块 IC1 的 29 脚发出的焊接/收弧切换信号,分别输入到 IC7 的控制端 10 脚和 11 脚。正常焊接时,N 点为低电平,所以 IC7 的 12 脚与 14 脚接通,2 脚与 15 脚接通,此 时输出的电压给定信号和电流给定信号分别受 VRV 和 VRA 控制。在收弧焊接时,N 点 为高电平,IC7 的 13 脚与 14 脚接通,1 脚与 15 脚接通,此时输出的电压给定信号和电流 给定信号分别受收弧电压、收弧电流调节电位器的控制,这样就实现了正常焊接规范与收 弧焊接规范的转换。
1、同步控制电路:
来自H点的电压控制信号
同步控制电路的输入电压直接取自主变压器 T1 的次级同一铁芯上相位相反的两个绕
组,省去了同步变压器,使触发电路简单可靠,保证了触发脉冲与主回路可控硅电压相位
的同步。输入的交流电压由 30 点和 32 点,分别经电阻 R140、R141 和稳压管 ZD12、ZD13
制电路的信号由 G 点输入使 PC15 导通时,+15V 电源经电阻 R138、PC15 的 4 脚和 3 脚、
R346、D109 对电容 C41 充电(在 QR6 导通 Q20 截止期间)当充电电压大于单结晶管控
制极 K 点电压时 PUT1 导通,同时脉冲输出推动管 Q23 导通,Q23 导通时 PUT1 输出电
削波后,加到光耦 PC4 的 1 脚和 2 脚。当输入电压非零端 3 脚和 4 脚导通,使 QR6 导通。而当输入电压过零时,PC4 截止,其 3 脚和 4
脚断开,而使 QR6 截止,达到与主可控硅电源同步目的。
2、脉冲产生电路:
这部分电路是由晶体管 Q20、电容 C41、单结晶管 PUT1 等元件组成,当来自逻辑控
相位同步,又保证了每个周期触发相位的一致性。
另外来自 H 点的电压调节电位器 VRV 控制的给定电压输出信号经 D106 接入电容 C41
的另一端。当 H 点电压高时 C41 充电到 K 点电位的时间就短,使触发脉冲前移;反之,
当 H 点的电压较低时,C41 充电时间就长,则触发脉冲发出的时间就滞后。因此,H 点
的电压控制着触发脉冲的移相,从而控制了主可控硅的导通角,来调整焊机的输出电压的
大小。
3、脉冲输出电路:
触发脉冲的输出电路使用了双光耦双向可控硅 PC1 分别接到主变压器 2 个相序相反的
绕组上的 2 只可控硅的阳极与控制极之间,起到一个开关作用,这种接法的优点在于:利
用光耦使输入端与输出端相隔离,同时不需要对触发脉冲进行功率放大。V 相和 W 相与
压下降,当低于 K 点电压时 PUT1 截止,C41 重复充电、放电,使 PUT1 输出一系列等距
离的脉冲信号,这一系列脉冲信号直到输入交流信号电压过零 QR6 截止时 Q20 导通为止。
C41 的电压通过 R343、Q20 对地放电,当输入交流电压信号过零后 QR6 导通、Q20 又截
止,开始重复上述充、放电过程。由此可见,同步控制电路既保证了触发脉冲与外电源的
当方波电压处于正半波时二极管 DA 导通,由 R168、R291 和电位器 VRV 对其分压 后,经电压跟随器 IC14B 分别输入到 IC14C 的反相输入端 9 脚和 IC14D 的同相输入端 12 脚,此时,IC14C 的 8 脚输出负电压,二极管 D67 因反偏而截止,这一路无输出;而 IC14D 的 14 脚输出为正电压,二极管 D69 因正偏而导通,输出的电压经电容 C77 滤波后,与由 电阻 R180 和 R183 与 R182 的分压(固定偏置,决定焊机的最低空载电压)合并后输入到 IC15A 的同相端,经其放大后,由 E 点输出焊接电压的基准信号,即给定调节信号。调 节 VRV 即可调节焊接电压的大小。
唐山松下 YM-350KR2 二氧化碳焊机电路分析
一、主可控硅触发电路: 本电路主要由光耦 PC4~PC6、开关管 QR6~QR8、Q20~Q22、单结晶管 PUT1~PUT3、 驱动管 Q23~Q25、输出光耦 PC1~PC3 等元件组成。本电路对应于 U、V、W 三相交流电 源由 3 个完全相同的电路组成,每路触发 2 只主回路可控硅。每相电路又可分为 3 个部分: 同步控制部分、脉冲产生部分、脉冲输出部分,下面以 U 相为例对这 3 个部分电路作一 分析。
当方波电压处于负半波是,二极管 DB 导通,此时,由焊接电流调节电位器 VRA、电 阻 R291、R168 对其分压后,经跟随器 IC14B 分别输入到 IC14C 的 IC14D,IC14C 的 8 脚输出为正电压,二极管 D67 导通,该电压经电容 C78 滤波平滑后,由 R213 输入到 IC15B 的同相端 5 脚,放大后由 F 点输出焊接电流的基准信号(即给定调节电流信号),此信号 受 VRA 控制,调节 VRA 即可调节焊接电流的大小。而 IC14D 的 14 脚输出负电压,二极 管 D69 因反偏而截止,此时这一路无输出。同时实现了电压、电流的控制信号有效分离。
(2)、焊丝选择与丝径选择电路: 焊接电压、送丝速度以及焊丝种类和焊丝直径都影响着焊接电流的大小。例如:在焊 接电压相同时使用的焊丝越细,焊丝的熔化速度就越快,所以需要的送丝速度也就越快。 因此,在电路中对应于不同的直径和不同的种类的焊丝就给予不同的电压偏置,以确定相 应的电流给定信号。在一元化时,还同时确定相应的电压给定信号以得到一元化调节的性 能。 其工作过程是: 当丝径选择开关 SW4 处于φ1.2 位置时,103 点与 105 点接通,IC19 的 11 脚为高电平,10 脚为低电平,所以 IC19 的 13 与 14 脚接通,2 与 15 脚接通,当 SW4 处于φ1.4 时,103 点悬空,IC19 的 11 和 10 脚都为低电平,所以电子开关 IC19 的 12 与 14 脚接通,2 与 15 脚接通。当 SW4 处于φ1.6 时,103 点与 104 点接通,IC19 的 1 与 15 脚接通,由此可见,对应 3 种不同的直径,分别有 3 条电压通路,电阻值各不相同,使得 输入到运放 IC9D 的电压值不同,则输出的电流值不同,从而得到不同的送丝速度。同理, 通过焊丝选择开关 SW4 对 IC10 的 9 脚(控制端)的控制来决定 3 与 4 或 4 与 5 脚接通, 得到不同的送丝速度。 (3)、电流运算电路: 由 IC19 的 4 脚输出的电流给定信号电压经 R71 送到 IC9D 的同相端 12 脚,IC9D 为同 相比例放大器,其放大倍数:Ao=1+(R70+VR3)/R69 +15V 电压经 R73 后与 IC9D 的 14 脚输出电压叠加,经电压跟随器 IC8D→R74 输出电