陀螺仪实验 (3)
测绘专业实验实习—— 陀螺仪定向原理

2. 陀螺仪定向原理与使用方法
2.3 陀螺仪的分类
陀螺经纬仪
上架式
全站式陀螺仪
上架式
全自动全站式陀螺仪
下架式
2. 陀螺仪定向原理与使用方法
2.4 陀螺仪的基本结构
陀螺仪的结构
悬挂带
全站式陀螺仪是将陀螺仪安放 在全站仪之上而构成的,其中
陀螺
陀螺仪部分的基本结构如右 图。
分划板
目镜筒
2. 陀螺仪定向原理与使用方法
4. 陀螺仪的基本结构
2. 陀螺仪定向原理与使用方法
2.2 陀螺仪定向原理-陀螺仪相对地球的运动
当陀螺仪在北纬某地设站,其主 轴无论是方位角(相对子午线) 和高度角(相对水平面)都不停 地发生变化。
由此可见,陀螺仪主轴在地球上 的视运动,不仅与纬度有关,还 与主轴与子午面及水平面之间的 夹角有关。
2. 陀螺仪定向原理与使用方法
2. 陀螺仪定向原理与使用方法
1. 陀螺仪的定轴性、进动性
1 定轴性 陀螺轴在不受外力作用时,它的方向始终指向初始恒定方向;
2 进动性 陀螺轴在受到外力作用时,将产生非常重要的效应-“进动”。
2. 陀螺仪定向原理与使用方法
1. 陀螺仪的定轴性、进动性
如右下图,左端为一可转动的陀螺,右端为一可移动的悬重。
(1)指向力矩MH
MH=HEcos sin
E- 地球自转角速度 - 测站地理纬度 - 陀螺主轴与子午面之间的
《传感器实验指导》陀螺仪及加速度计特性及应用实验
《传感器实验指导》陀螺仪及加速度计特性及应用实验1.了解陀螺仪及加速度计的工作原理;2.掌握陀螺仪及加速度计的测量方法;3.掌握陀螺仪及加速度计的电路组成及原理。
1.分析陀螺仪及加速度计测量电路的原理;2.连接陀螺仪及加速度计物理信号到电信号的转换电路;3.软件观测传感器姿态变化时输出信号的变化情况;4.记录实验波形数据并进行分析。
1.开放式传感器电路实验主板;2.陀螺仪及加速度计测量模块;3.导线若干。
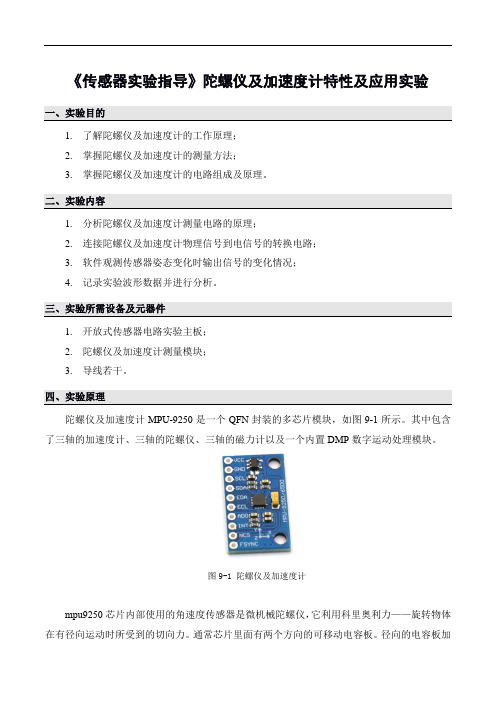
陀螺仪及加速度计MPU-9250是一个QFN封装的多芯片模块,如图9-1所示。
其中包含了三轴的加速度计、三轴的陀螺仪、三轴的磁力计以及一个内置DMP数字运动处理模块。
图9-1 陀螺仪及加速度计mpu9250芯片内部使用的角速度传感器是微机械陀螺仪,它利用科里奥利力——旋转物体在有径向运动时所受到的切向力。
通常芯片里面有两个方向的可移动电容板。
径向的电容板加震荡电压迫使物体作径向运动(有点像加速度计中的自测试模式),横向的电容板测量由于横向科里奥利运动带来的电容变化(就像加速度计测量加速度)。
因为科里奥利力正比于角速度,所以由电容的变化可以计算出角速度。
陀螺仪(Gyroscope、GYRO-Sensor)也叫地感器,传统结构是内部有个陀螺,如下图所示(三轴陀螺),三轴陀螺仪的工作原理是通过测量三维坐标系内陀螺转子的垂直轴与设备之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态。
三轴陀螺仪可以同时测定上、下、左、右、前、后等6个方向(合成方向同样可分解为三轴坐标),最终可判断出设备的移动轨迹和加速度。
也就是说陀螺仪通过测量自身的旋转状态,判断出设备当前运动状态,是向前、向后、向上、向下、向左还是向右呢,是加速(角速度)还是减速(角速度)呢,都可以实现,但是要判断出设备的方位(东西南北),陀螺仪就没有办法。
图9-2 传统结构陀螺仪加速度计(Accelerometer、G-Sensor)也叫重力感应器,实际上是可以感知任意方向上的加速度(重力加速度则只是地表垂直方向加速度),加速计通过测量组件在某个轴向的受力情况来得到结果,表现形式为轴向的加速度大小和方向(XYZ),这一点又有点类似于陀螺仪,但陀螺仪的更多关注自身旋转情况(原位运动),加速计则主要是测量设备的受力情况,也就是三轴运动情况,尽管加速计也可能在某个小范围换算出角速度的可能,但设计原理决定更适合于空间运动判断。
陀螺仪基本特性试验
陀螺仪基本特性试验陀螺仪基本特性试验一、实验目的1.用实验的方法观察并验证陀螺仪的基本特性——定轴性,进动性和陀螺力矩效应。
2.学习使用陀螺实验用主要设备——转台。
3.利用线性回归方法进行数据处理。
二、实验设备1.TZS-74陀螺仪表综合试验转台。
2.双自由度陀螺仪。
3.砝码。
4.实验用电源:交流220V,50~(转台用)36V,400~三相电源。
三、实验内容和步骤(一)定轴性实验1.陀螺马达不转时,开动转台,观察陀螺仪是否有定轴性。
2.接通电源,几下陀螺转子的转速方向,开动转台观察转子转动时陀螺仪的定轴性。
(二)进动性实验1.外加力矩,观察进动现象。
根据进动规律判断角动量H的方向,并和上面记下的转速方向做一比较。
2.测量进动角速度和外加力矩的关系:(1)在加力杆的前后标尺上分别加不同重量的砝码,记录进动的角度与实践,列表并计算出对应于每一外加力矩的进动角速度值,画出实验曲线。
(2)根据进动规律x Mω=(H J=Ω)计算出对应于每一外加H力矩的进动角速度,画出理论曲线。
(3)将实验曲线与理论曲线进行比较并说明产生误差的原因。
(4)用线性回归的方法进行数据处理,并通过求回归系数的方法求出角动量H的值。
3.测量进动角速度和角动量的关系在同一外力矩作用下,测量陀螺马达在额定转速下和断电一分钟后的进动角速度(断电一分钟后马达转速低于额定转速)。
根据实验结果说明进动角速度和角动量的关系。
(三)陀螺力矩实验1.开动转台,使双自由度陀螺仪基座转动,观察有无陀螺力矩效应,并说明原因。
2.观察双自由度陀螺仪在进动时的陀螺力矩效应。
用手对内框架加力矩,用手的感觉来测量陀螺力矩的大小和方向。
说明陀螺力矩产生的原因。
3.拧紧固定外框架的螺钉。
用手对内框架加力矩。
观察此时转子轴的运动方向。
用手感觉此时对手是否有陀螺力矩作用,加以分析。
4.测量陀螺力矩和进动角速度的关系为了达到测量陀螺力矩的目的,我们拧紧固定外框架的螺钉,是陀螺仪成为单自由度陀螺仪。
陀螺运动实验报告

一、实验目的1. 了解陀螺的基本原理和特性;2. 掌握陀螺的进动、自转和稳定等运动形式;3. 通过实验验证陀螺的转动惯量与质量分布的关系;4. 分析陀螺运动中的能量转换和守恒规律。
二、实验原理陀螺是一种利用转动惯量原理制成的装置,具有进动、自转和稳定等运动形式。
陀螺的运动主要受到外力矩、摩擦力矩和惯性力矩的影响。
1. 进动:当陀螺受到外力矩的作用时,其运动轨迹会发生改变,这种现象称为进动。
进动运动的角速度与外力矩成正比,与陀螺的转动惯量成反比。
2. 自转:陀螺在没有外力矩作用下,会保持其原有的转动状态,这种现象称为自转。
自转运动的角速度与陀螺的转动惯量成反比。
3. 稳定:当陀螺受到外力矩的作用时,其运动轨迹会逐渐趋于稳定,这种现象称为稳定。
稳定运动的角速度与外力矩成正比,与陀螺的转动惯量成反比。
4. 转动惯量:陀螺的转动惯量是指陀螺在旋转过程中,各部分质量相对于旋转轴的距离平方与质量的乘积之和。
转动惯量与陀螺的质量分布有关。
三、实验仪器与材料1. 陀螺仪;2. 三轴回转仪;3. 计数光电门;4. 光电门用直流稳压电源(5伏);5. 陀螺仪平衡物;6. 数字秒表(1/100秒);7. 底座(2个);8. 支杆(2个);9. 砝码(50克、10克,4个);10. 卷尺或直尺。
四、实验步骤1. 将陀螺仪固定在三轴回转仪上,调整陀螺仪的初始位置,使其水平。
2. 用砝码在陀螺仪的旋转轴上施加外力矩,观察陀螺的进动现象。
3. 记录陀螺进动过程中,光电门检测到的通过次数,以及陀螺的转动惯量。
4. 在陀螺进动过程中,改变砝码的质量和位置,观察陀螺的进动现象,并记录相关数据。
5. 在陀螺进动过程中,逐渐减小砝码的质量,观察陀螺的稳定现象,并记录相关数据。
6. 在陀螺稳定过程中,改变陀螺的初始位置,观察陀螺的稳定现象,并记录相关数据。
7. 分析实验数据,验证陀螺的转动惯量与质量分布的关系,以及能量转换和守恒规律。
五、实验结果与分析1. 陀螺进动现象:当砝码施加外力矩时,陀螺发生进动。
惯导实验报告——帅哥队

惯性导航实验报告——陀螺运动特性的研究实验小组:111711班第四小组学号:11171016-11171020依次对应学号:王瑞捷廖旭博周林高硕赵大年指导老师:惯导实验——陀螺特性的研究一、实验目的1、通过四个不同的小实验了解陀螺仪的运动特性2、了解什么是陀螺的进动性3、了解什么是陀螺的定轴性4、了解什么是陀螺的陀螺力矩二、实验内容1、实验一将高速旋转的陀螺转子放在插座上,观察并记录现象和分析原因。
2、实验二将高速旋转的陀螺转子竖放在转盘上,观察并记录现象和分析原因。
3、实验三将高速旋转的陀螺转子放在倾斜导轨上使之下滑,观察并记录现象和分析原因。
4、实验四将高速旋转的陀螺系统放在插座上,分开内外轨使之相互垂直,再分别转动内外轨,观察并记录现象和分析原因。
三、实验记录及原理说明实验一1、看到的现象,体现了什么特性?现象:可以看见陀螺转子呈锥形左右缓慢转动。
特性:体现了陀螺的进动性。
2、陀螺转速降低后,观察到的现象及原因?现象:当陀螺的转速逐渐减慢时,锥形的角度开始变大,且其进动角速度变大。
原因:由于陀螺受到摩擦力的作用,其转速会逐渐降低,即陀螺的角动量H变小,而外力矩不变。
由M=ω×H······M=ω*H*sin 可知,此时陀螺的进动角速度ω会变大,锥形角度也变大。
3、手提陀螺转子的感受及原因分析?感受:当我们想把高速旋转的陀螺放到转动插座上时,手明显能感受到陀螺的“力”反作用于我们的手。
原因:这是因为高速旋转的陀螺在受到外力矩的时候,陀螺进动,此时陀螺存在一个反作用力矩(即陀螺力矩),其大小与外力矩相等,方向与之相反,并作用于给陀螺仪施加外力矩的物体上,即我们的手。
实验二1、转盘与转子的转动方向是否一致?原因?答:可以看见陀螺转子与转盘一起转动,方向一致。
原因:转盘与转子转动方向一致表现了高速旋转的陀螺有很好的定轴性。
另外,在第一段实验中我们说明了陀螺具有陀螺力矩,本实验中竖直放在转盘上的转子与转盘之间存在微小摩擦力,转盘对转子有一个摩擦力矩,因此转子对转盘有一个大小相等方向相反的陀螺力矩。
陀螺仪实验——精选推荐
陀螺仪实验陀螺仪是一种具有比较复杂的运动学和动力学现象的装置,它有一个高速旋转的定点运动转子,该转子的轴线具有定向性,这是陀螺的最大特点。
陀螺的定向性在工程中有重要用途,如舰船和导弹的导航、稳定船舶和车辆的姿态,实际上行驶的自行车能够不翻倒也是由于陀螺的定向性,这时自行车的两个轮子就是陀螺。
因此,陀螺仪实验对于学生巩固和提高所学运动学、动力学知识,对复杂运动规律的认知和分析计算都有重要作用。
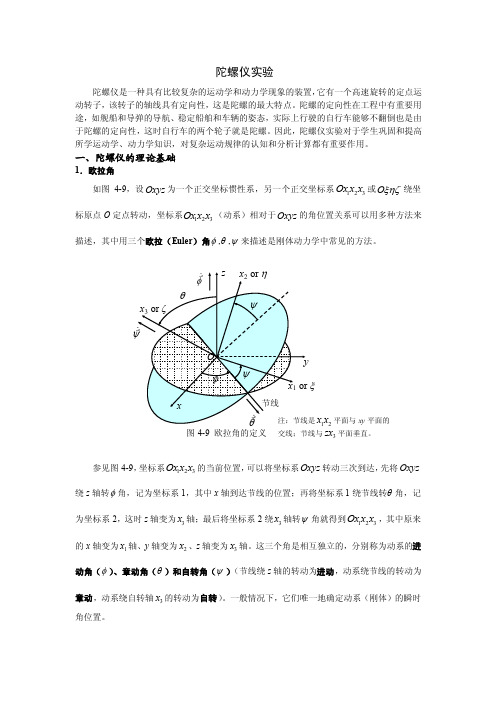
一、陀螺仪的理论基础1.欧拉角如图4-9,设Oxyz 为一个正交坐标惯性系,另一个正交坐标系321x x Ox 或O ξηζ绕坐标原点O 定点转动,坐标系321x x Ox (动系)相对于Oxyz 的角位置关系可以用多种方法来描述,其中用三个欧拉(Euler )角φ,θ,ψ来描述是刚体动力学中常见的方法。
参见图4-9,坐标系321x x Ox 的当前位置,可以将坐标系Oxyz 转动三次到达,先将Oxyz 绕z 轴转φ角,记为坐标系1,其中x 轴到达节线的位置;再将坐标系1绕节线转θ角,记为坐标系2,这时z 轴变为3x 轴;最后将坐标系2绕3x 轴转ψ角就得到321x x Ox ,其中原来的x 轴变为1x 轴、y 轴变为2x 、z 轴变为3x 轴。
这三个角是相互独立的,分别称为动系的进动角(φ)、章动角(θ)和自转角(ψ)(节线绕z 轴的转动为进动,动系绕节线的转动为章动,动系绕自转轴3x 的转动为自转)。
一般情况下,它们唯一地确定动系(刚体)的瞬时角位置。
再来确定动系321x x Ox 的角速度矢量Ω。
在~t t t +∆的t ∆时间内,设动系角位置的无穷小增量为φ∆、θ∆和ψ∆,动系的这种无穷小角位置改变可以将动系分别绕z 轴转φ∆、绕节线转θ∆和绕3x 轴转ψ∆后叠加得到,且结果与转动次序无关(我们对此不作证明,但必须注意,刚体多次有限转动的结果却与转动次序有关,因此不能叠加;学生可以将一本书沿任意两条边以一种次序各转90︒,再重新按不同的次序各转90︒,结果是不同的)。
陀螺实验报告
陀螺实验报告陀螺实验报告引言:陀螺是一种旋转的物体,它的运动规律一直以来都吸引着科学家们的注意。
为了更好地理解陀螺的运动特性,我们进行了一系列的陀螺实验。
本报告将详细介绍实验的目的、实验装置、实验步骤、实验结果以及实验结论。
实验目的:本次实验的目的是研究陀螺的稳定性和运动规律,通过实验探究陀螺的物理特性和运动机制。
实验装置:我们使用了一架陀螺装置,该装置由一个陀螺仪和一个支架组成。
陀螺仪由一个圆盘和一个轴组成,圆盘上有一个固定的重物。
支架上有一个可调节的支点,用于保持陀螺仪的平衡。
实验步骤:1. 调整支架:首先,我们需要调整支架,使得支点与陀螺仪的轴线垂直,并保持支点的稳定性。
2. 给陀螺仪加力:接下来,我们用手指轻轻地给陀螺仪加力,使其开始旋转。
注意力的大小和方向要一致,以确保陀螺仪的旋转方向和速度。
3. 观察陀螺仪的运动:我们仔细观察陀螺仪的运动,包括旋转的速度、旋转的方向以及陀螺仪的稳定性。
4. 记录实验数据:我们记录下陀螺仪的旋转时间、旋转速度以及稳定性等实验数据。
5. 重复实验:为了提高实验的准确性,我们进行了多次实验,并记录每次实验的数据。
实验结果:通过实验观察和数据记录,我们得到了以下实验结果:1. 陀螺仪的旋转速度与加力的大小和方向有关,加力越大,陀螺仪的旋转速度越快。
2. 陀螺仪的旋转方向与加力的方向一致。
3. 陀螺仪在旋转过程中具有一定的稳定性,能够保持一定的旋转时间和旋转速度。
实验结论:通过本次实验,我们得出以下结论:1. 陀螺的运动规律与加力的大小和方向有关,加力越大,陀螺的旋转速度越快。
2. 陀螺的旋转方向与加力的方向一致。
3. 陀螺具有一定的稳定性,能够保持一定的旋转时间和旋转速度。
进一步研究:虽然本次实验对陀螺的运动特性进行了初步研究,但还有许多问题值得进一步探索。
例如,我们可以研究不同形状和重量的陀螺对运动规律的影响,以及陀螺的旋转速度与稳定性之间的关系等。
结语:通过本次实验,我们对陀螺的运动特性有了更深入的了解。
陀螺仪的转动惯量[3]
![陀螺仪的转动惯量[3]](https://img.taocdn.com/s3/m/1c687bdc5022aaea998f0fdd.png)
陀螺仪实验实验目的1、通过测量角加速度确定陀螺仪的转动惯量;2、通过测量陀螺仪的回转频率和进动频率确定陀螺仪的转动惯量;3、观察和研究陀螺仪的进动频率与回转频率与外力矩的关系;4、观察和研究陀螺仪的章动频率与回转频率的关系。
实验仪器①三轴回转仪;②计数光电门;③光电门用直流稳压电源(5伏);④陀螺仪平衡物;⑤数字秒表(1/100秒);⑥底座(2个);⑦支杆(2个);⑧砝码50克+10克(4个);⑨卷尺或直尺。
相关术语:转动惯量;力矩;角动量;进动;章动。
实验原理1、如图2用重物(砝码)落下的方法来使陀螺仪盘转动,这时陀螺仪盘的角加速度α为:α=dωR/dt=M/I P (1)式中ωR为陀螺仪盘的角速度,I P为陀螺仪盘的转动惯量。
M=F.r为使陀螺仪盘转动的力矩。
由作用和反作用定律,作用力为:F=m(g-a) (2)式中g为重力加速度,a为轨道加速度(或线加速度)轨道加速度与角加速度的关系为:a=2h/t F2;α=a/r (3) 式中h为砝码下降的高度,r如图1所示为转轴的半径,t F 为下落的时间。
将(2)(3)代入(1)可得:h mgrmrIt PF22222+=(4)测量多组t F和h的值用作图法或最小二乘法拟合数据求出陀螺仪盘的转动惯量。
2、如图3所示安装好陀螺仪,移动平衡物W使陀螺仪AB 轴(X轴)在水平位置平衡,用拉线的方法使陀螺仪盘绕X 轴转动(尽可能提高转速),此时陀螺仪具有常数的角动量L:L=I P.ωR(5)当在陀螺仪的另一端挂上砝码m(50g)时就会产生一个附加的力矩M*,这将使原来的角动量发生改变:dL/dt=M*=m*gr*(6)由于附加的力矩M*的方向垂直于原来的角动量的方向,将使角动量L变化dL,由图1可见:dL=Ldϕ图1 陀螺仪进动的矢量图PP R P P I gr m dt dL I dt dL L dt d ωωϕω**11====P P R t I gr m t 2**41π=这时陀螺仪不会倾倒,在附加的力矩M *的作用下将会发生进动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验报告88数学系07级 姓名:宗艾俐 日期:08.11.15 学号:PB07025015实验原理用自己的语言总结实验题目:陀螺仪实验 实验目的:1、通过测量角加速度确定陀螺仪的转动惯量;2、通过测量陀螺仪的回转频率和进动频率确定陀螺仪的转动惯量;3、观察和研究陀螺仪的进动频率与回转频率与外力矩的关系;4、观察和研究陀螺仪的章动频率与回转频率的关系。
实验原理:1、如图2用重物(砝码)落下的方法来使陀螺仪盘转动,这时陀螺仪盘的角加速度α为:α=d ωR /dt=M/I P (1)式中ωR 为陀螺仪盘的角速度,I P 为陀螺仪盘的转动惯量。
M=F .r 为使陀螺仪盘转动的力矩。
由作用和反作用定律,作用力为:F=m(g-a) (2) 式中g 为重力加速度,a 为轨道加速度(或线加速度) 轨道加速度与角加速度的关系为:a=2h/t F 2; α=a/r (3) 式中h 为砝码下降的高度,r 如图1所示为转轴的半径,t F 为下落的时间。
将(2)(3)代入(1)可得:h mgrmr I t P F22222+= (4) 测量多组t F 和h 的值用作图法或最小二乘法拟合数据求出陀螺仪盘的转动惯量。
2、如图3所示安装好陀螺仪,移动平衡物W 使陀螺仪AB 轴(X 轴)在水平位置平衡,用拉线的方法使陀螺仪盘绕X 轴转动(尽可能提高转速),此时陀螺仪具有常数的角动量L :L =I P .ωR (5)当在陀螺仪的另一端挂上砝码m (50g )时就会产生一个附加的力矩M *,这将使原来的角动量发生改变:dL/dt =M *=m *gr * (6)由于附加的力矩M *的方向垂直于原来的角动量的方向,将使角动量L 变化dL ,由图1可见: dL=Ld ϕ图1 陀螺仪进动的矢量图PP R P P I gr m dt dL I dt dL L dt d ωωϕω**11====P PR t I gr m t 2**41π=这时陀螺仪不会倾倒,在附加的力矩M *的作用下将会发生进动。
进动的角速度.ωP 为(ωP =2π/t P ,ωR =2π/t R ):(7)所以可以得到以下关系式:(8)因此1/t R 与t P 是线性关系,由作图法或最小二乘法拟合数据求出陀螺仪盘的转动惯量。
实验仪器:①三轴回转仪; ②计数光电门; ③光电门用直流稳压电源(5伏); ④陀螺仪平衡物; ⑤数字秒表(1/100秒); ⑥底座(2个); ⑦支杆(2个);⑧砝码50克+10克(4个); ⑨卷尺或直尺。
实验内容:1根据实验装置图一组装好陀螺仪,用砝码落下的方法来使陀螺仪盘转动,用米尺测出砝码距地面的高度h ,并用秒表记下砝码落下 所用的时间t f ;重复实验五次,并将每次所得数据记录下来。
2根据实验装置图二组装好陀螺仪,移动平衡物w 使陀螺仪的AB 轴(x 轴)平衡,用拉线的方法使陀螺仪盘绕x 轴转动,并且尽可能的提高转速,用光电门测出自转周期T R ;然后在陀螺仪的另一端挂上砝码m (30g ),此时陀螺仪在附加力矩的作用下,将会发生进动,用秒表测出此时的进动周期T P ;重复实验五次,并将每组实验数据记录下来。
数据处理: 1、已知参数:轴半径r=22.5mm , 半径R=122.5mm , 厚度d=28mm , 密度, 进动半径=270mm , 合肥的重力加速度g=9.795. m=60g m*=30g由以上参数可得陀螺仪的质量m =·(-)d=0.9=1.147356 kg距地高度h/(cm ) 90.0 80.0 70.060.0 50.0 40.0 下落时间T F /(s ) 7.02 6.636.16 5.76 4.99 4.52设陀螺仪盘角加速度为,/R 角速度, I P 为转动惯量,M=F ·r 为陀螺仪盘转动的力矩,则有=……………………………………①根据作用和反作用律可知F=m(g-a)………………………………②其中g为合肥的重力加速度,a为轨道加速度;又落体法时陀螺仪与砝码具有相同的轨道加速度,故a=………③h为砝码下降的高度,为下落的时间;又知轨道加速度和角加速度的关系为=,将此式连同②③代入①式可得=·h ………………………………④可以发现与h呈线性关系,以h为横轴,为纵轴,描出以下各点,h/m 0.90 0.80 0.70 0.60 0.50 0.4049.28 43.96 37.95 33.18 24.90 20.43/s2随h的变化曲线PP R P P I gr m dtdL I dt dL L dt d ωωϕω**11====P PR t I gr m t 2**41π=Linear Regression for Data1_B: Y = A + B * X Parameter Value Error------------------------------------------------------------ A -3.34429 1.41168 B 58.91429 2.10052------------------------------------------------------------ R SD N P------------------------------------------------------------ 0.99747 0.87871 6 <0.0001------------------------------------------------------------ 由此可知直线斜率k=58.91由 k =可得 I P =(mgkr 2-2mr 2)代入数据即I P =(0.06*9.795*58.91*0.02252-2*0.06*0.02252)=8.73*kg/m 23、进动法测转动惯量: 自转周期T R /s 0.311 0.289 0.398 0.355 0.325 0.31 进动周期T P /s 16.3 18.11 14.33 14.79 15.64 16.44 P R 在其另一端挂上砝码m (30g )后,产生的附加力矩会使角动量发生改变 dL/dt =M *=m *gr * 由图1可见: dL=Ld ϕ ……………………⑥这时陀螺仪发生进动,进动的角速度.ωP 为(ωP =2π/t P ,ωR =2π/t R ):所以可以得到以下关系式: 可见1/t R 与t P 是线性关系。
根据实验中测得的自转周期,可得如下数据:图1 陀螺仪进动的矢量图1//s -13.2153.460 2.513 2.817 3.078 3.226进动周期T P /s 16.318.11 14.33 14.79 15.64 16.44以1/为y 轴,T p 为x 轴,描出各点并拟合直线如下图Linear Regression for Data1_D: Y = A + B * XParameter Value Error------------------------------------------------------------ A -0.73602 0.62728 B 0.23769 0.03925------------------------------------------------------------ R SD N P------------------------------------------------------------ 0.94956 0.11835 6 0.00375------------------------------------------------------------ 由此可知斜率为k=0.238由 P I gr m k 2**4π= 可得I P =代入数据得I P =(0.03*9.795*0.27)/(4*0.238*3.142)=8.45*kg/m 24、观察章动现象在陀螺仪进动过程中在某时刻给予陀螺仪一个沿转动方向的力就会产生章动现象,在试验过程中当给予陀螺仪力F后,陀螺仪会在一段时间内产生有规律的运动现象,刚受到推力时陀螺仪会转动加速,但加速一小段时间后会减速到停止运动(在我的试验过程中,我观察到的现象是如此),然后再加速,进行新一轮的循环,在几个循环之后这种现象不能再观测到)。
误差分析:可以发现落体法对进动法测出的转动惯量的相对误差为((8.73-8.45)/8.45)*100%=3.3%,两种方法所测的值不同可能有以下原因: 1.本实验中由于人对重物开始运动和落地时间的判断误差较大而重物在试验过程中运动时间较短,故误差较大。
2.落体法时有空气阻力,此时砝码不是自由落体,侧地的时间稍长,致使所得的转动惯量偏小。
3.进动法时用光电门测自转周期时,因周期太小,测量者反应时间引起实验误差。
4.试验仪器的摩擦较大思考题:1、陀螺旋进常伴随有章动,为什么试验过程中我们并没有考虑?答:陀螺旋进常伴随有章动,但振幅极微小且频率极高的章动,由于轴承摩擦和空气阻尼作用而很快衰减,因此在分析具体问题时常忽略陀螺章动,只考虑陀螺旋进。
2、能否直接计算陀螺仪的转动惯量?答:能。
实验给出了陀螺仪的各项参数,我们可以据此算出陀螺仪盘的质量,根据公式I=mr2可直接算出其转动惯量。