步进电机控制原理
步进电机控制原理
步进电机控制原理步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
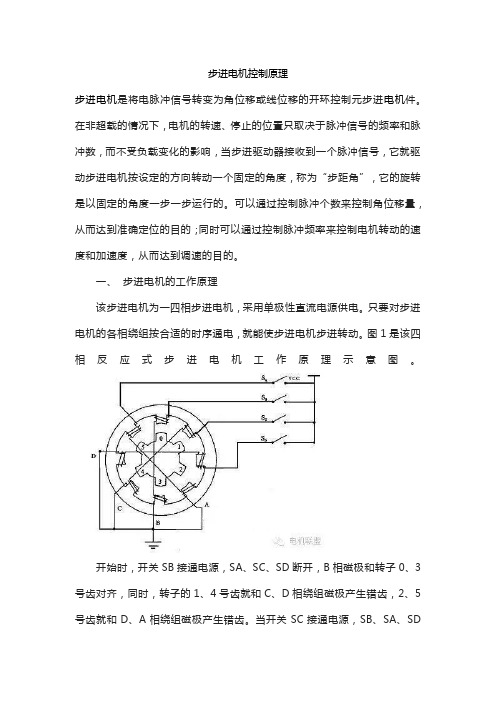
一、步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D 四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍c八拍51单片机驱动步进电机的方法:驱动电压12V,步进角为7.5度. 一圈360 度, 需要48 个脉冲完成!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
步进电机控制系统原理
步进电机控制系统原理步进电机控制系统的原理是控制步进电机运动,使其按照既定的速度和步长进行转动。
步进电机是一种特殊的电机,它通过控制输入的脉冲信号来驱动转子旋转一定的角度,步进电机每接收到一个脉冲信号,转子就会转动一定的角度,因此可以精确控制电机的位置和速度。
控制器是步进电机控制系统的核心部分,它通过软件算法生成脉冲信号来控制步进电机转动。
脉冲信号的频率和脉宽可以调节,频率决定步进电机转动的速度,脉宽决定步进电机转动的步长。
通常采用微处理器作为控制器,通过编程来控制脉冲信号的生成。
驱动器是将控制器产生的脉冲信号转换为电流信号,驱动步进电机转动。
驱动器通常由一个或多个功率晶体管组成,通过开关控制来产生恰当的电流信号。
驱动器还可以采用电流反馈回路来实现闭环控制,提高步进电机的控制精度。
步进电机是根据驱动器的电流信号转动的执行部件,它通过电磁力和磁场相互作用来实现转动。
步进电机根据控制器产生的脉冲信号确定转动的角度和速度。
步进电机一般由定子和转子组成,定子上有若干个电磁线圈,转子上有若干个永磁体。
当驱动器给定一个电流信号时,电流通过定子线圈产生磁场,与转子上的永磁体相互作用,使转子转动一定的角度。
当驱动器改变电流信号时,磁场方向改变,转子转动的角度和方向也会改变。
步进电机控制系统的原理就是通过控制器产生脉冲信号,驱动器将脉冲信号转换为电流信号,通过电流信号驱动步进电机转动。
控制器根据需要调整脉冲信号的频率和脉宽,从而控制步进电机的转动速度和步长。
驱动器根据电流信号的大小和方向控制步进电机的转动角度和方向。
步进电机根据电磁力和磁场相互作用来实现转动。
通过调节脉冲信号的频率和脉宽,可以实现对步进电机的精确控制。
步进电机的控制原理

步进电机的控制原理步进电机是一种高精度的电动执行器,具有定位准确、不需反馈器和转矩、速度和位置控制的特点,广泛用于数码设备、计算机和机器人控制等领域。
步进电机的控制原理包括三部分:输入信号、驱动电路和电机转动。
一、输入信号步进电机的输入信号有两种:脉冲信号和方向信号。
脉冲信号是由控制器发送给驱动电路的,用来控制电机的转动步数和速度。
步进电机的每一步运动需要一定的脉冲信号,具体步数由控制器编程决定。
方向信号则表示电机转动的正、反方向,一般由控制器通过电平高低来控制。
输入信号是步进电机运动的基础,只有正确的输入信号才能实现精准控制。
二、驱动电路步进电机的控制需要依赖驱动电路,一般为双H桥驱动电路。
它能够根据输入信号的变化,控制步进电机的相序和电流大小,从而实现电机的精准控制。
驱动电路是整个控制系统的核心部分,不同类型的步进电机需要不同的驱动方式,因此制定相应的驱动电路是十分重要的。
三、电机转动步进电机的转动是由驱动电路提供的电流产生的磁场、轴承和转子间的相互作用实现的。
不同类型的步进电机其转动的方式也不同,如单相、两相、五相、六相等。
不同类型的步进电机也需要不同的驱动方式,否则会导致控制不准确或失步。
综上所述,步进电机的控制原理需要在三个方面进行开展:输入信号、驱动电路和电机转动。
只有以正确的方式输入信号,配合正确的驱动电路和电机类型,才能实现精准的电机控制。
在实际应用中,我们需要根据具体情况来选择不同类型的步进电机和相应的控制方式,以实现最优控制效果。
步进电机的控制的原理

步进电机的控制的原理步进电机(Stepper Motor)是一种将电脉冲信号转换为角度让电机转动的电机。
它通常由定子和转子组成,定子线圈通过控制电流的输入来产生磁场,而转子则是由磁材料制成的。
步进电机有许多种类型,其中最常见的是单圈、双圈和四圈步进电机。
步进电机凭借其高精度、高可靠性等优点,在很多领域都有广泛的应用,包括打印机、电子门锁、数码相机等。
步进电机的控制原理主要包括两个方面,即脉冲信号的输入以及驱动电流的控制。
下面将详细介绍这两个方面的原理。
首先是脉冲信号的输入。
步进电机的转动是通过输入脉冲信号驱动的。
脉冲信号可以由切换电路产生,也可以由计算机或其他控制系统发出。
脉冲信号的频率决定了步进电机转动的速度,而脉冲信号的数量则决定了步进电机转动的角度。
当脉冲信号输入到步进电机的一个定子线圈时,该线圈产生一个磁场。
根据电磁感应定律,该磁场将对转子产生一个力矩,使其转动一定的角度。
当脉冲信号不再输入时,磁场也消失,转子停止转动。
如果脉冲信号连续输入,那么步进电机将不断地进行转动。
接下来是驱动电流的控制。
步进电机的线圈通常由绝缘性材料包裹,以防止电流损耗。
驱动电流的控制是通过对步进电机的定子线圈施加合适的电压来实现的。
根据欧姆定律,电流与电压的比值等于线圈的电阻。
通过改变电压的大小,可以控制线圈中的电流,进而控制步进电机的转动速度和力矩。
为了更好地控制步进电机的转动,常常采用两相驱动方式。
两相驱动方式是指将步进电机的两个定子线圈分别驱动,使其产生独立的磁场。
通过交替输入脉冲信号,可以让步进电机转动一个固定的角度。
在实际应用中,常常使用驱动器来控制步进电机的驱动电流。
驱动器接受外部脉冲信号,并通过电流放大器将电流信号传输给定子线圈。
此外,通过改变定子线圈的电流方向,可以改变步进电机的转动方向。
例如,如果一个线圈中的电流是顺时针方向的,而另一个线圈中的电流是逆时针方向的,那么步进电机就会向顺时针方向转动。
步进电机的原理
步进电机的原理
步进电机是一种通过电信号控制转子按一定步长运动的电机。
其工作原理是将电信号转化为磁场,进而驱动转子。
步进电机通常由定子和转子组成。
定子含有若干绕组,每个绕组在电流作用下产生磁场。
转子上有多对永磁体,其磁极数目与定子绕组数目相一致。
当给定子绕组通电时,会在定子上产生磁场,这个磁场会吸引转子上的永磁体,使转子翻转一定的角度。
通过改变定子绕组通电的顺序和时间,可以控制转子按一定步长顺时针或逆时针旋转。
步进电机一般由驱动器和控制器配合使用。
驱动器将控制器发送的电信号转换为合适的电流和电压,以驱动步进电机。
控制器根据需要设定转子运动的步长和方向,并发出相应的电信号给驱动器。
步进电机具有精准定位、运动平稳等特点,适用于需要精确控制位置和转速的设备。
它被广泛应用于打印机、数控设备、机器人、电子仪器等领域。
步进电机工作原理

步进电机工作原理
步进电机是一种控制精度较高的电机,它的工作原理是通过对电机的电流进行精确控制来实现旋转。
步进电机通常由一个固定的磁体和一个旋转的转子组成。
固定磁体中有若干个磁极,而转子上也有相应的磁极。
这些磁极的排列方式决定了电机的工作方式。
步进电机的转动是通过改变电流的方向和大小来实现的。
当电流通过固定磁体时,会产生一个磁场,这个磁场会与转子上的磁场相互作用,从而使得转子旋转到一个新的位置。
当电流的方向和大小改变时,转子也会相应地改变位置。
为了精确定位,步进电机通常会将转子分为几个等距的位置,每个位置都与一个特定的电流模式相对应。
通过改变电流的方式,可以使转子逐步移动到下一个位置,从而实现精确的旋转。
步进电机的转子移动是离散的,而不是连续的。
这意味着它可以精确定位,并且不需要使用传统的位置反馈设备来监测转子的位置。
步进电机适用于需要精确控制和定位的应用,如打印机、数控机床和机器人等。
总之,步进电机通过精确控制电流来实现转子的旋转,从而实现精确的位置控制。
它的工作原理基于磁场的相互作用,使得转子可以按照离散的步进来旋转。
步进电机细分控制原理及仿真分析
步进电机细分控制原理及仿真分析引言:步进电机是一种将电能转换为机械能的装置,它具有定位精度高、启动扭矩大、体积小等优点,广泛应用于工业自动化领域。
在一些特定场合,需要对步进电机进行细分控制,以提高其运动精度和平滑性。
本文将介绍步进电机细分控制的原理,并通过仿真分析验证其效果。
一、步进电机基本原理:步进电机是一种工作在离散回转模式下的执行元件,它通过电流的阶跃变化来实现角度的离散改变。
一般步进电机由两相及以上的线圈组成,线圈由直流电源供电,通过驱动电流改变线圈中的磁场,使得转子发生步进运动。
步进电机可以精确控制每一步的角度,具有良好的定位性能。
二、步进电机细分控制原理:传统的步进电机控制方式是通过改变驱动电流的方向和大小来控制转子的转动。
而在细分控制中,我们将一个步进角(通常为1.8度)细分为更小的角度,以提高运动的精度。
细分控制的原理可以通过脉冲信号来实现,通过控制脉冲信号的频率和脉冲数来控制步进电机的运动。
三、细分控制方式:常见的步进电机细分控制方式有两种,一种是全步进细分控制,即将一个步进角细分为多个小角度步进;另一种是半步进细分控制,即将一个步进角细分为相邻两个小角度步进之间的中间角度。
这两种方式各有优劣,在实际应用中可以根据要求进行选择。
四、细分控制的仿真分析:为了验证步进电机细分控制的效果,我们可以通过仿真软件进行仿真分析。
以下是具体的仿真步骤:1.创建仿真模型:在仿真软件中,根据步进电机的参数创建电机模型,并设置驱动电流和控制脉冲的参数。
2.编写控制算法:根据细分控制的原理,编写相应的控制算法。
算法中需要考虑脉冲信号的频率和脉冲数的设置,以及步进电机的特性。
3.运行仿真模型:通过运行仿真模型,观察步进电机的运动情况。
可以通过绘制转子角度随时间的变化曲线,来评估细分控制的效果。
4.优化参数:根据仿真结果,评估细分控制的效果,并进行参数优化。
可以尝试不同的细分控制方式和参数设置,以达到理想的控制效果。
步进电机控制器的工作原理

步进电机控制器的工作原理步进电机控制器是用来控制步进电机的设备,它通过向步进电机提供电流和脉冲信号来驱动电机旋转,并控制电机的运动精度和速度。
本文将详细解释步进电机控制器的工作原理,并提供易于理解的解释。
1. 步进电机基本原理在了解步进电机控制器的工作原理之前,首先需要了解步进电机的基本原理。
步进电机是一种转动电机,它的转动是以确定的步长进行的,每步的转动角度是固定的。
步进电机由定子和转子构成,定子上有多对绕组,每对绕组分别对应一个相位。
转子上有多对磁极,与定子绕组的极性相反。
当绕组通电时,会产生一个磁场,与转子上的磁极相互作用,从而使转子发生转动。
步进电机的转动是通过改变绕组通电的顺序来实现的,这种改变电流方向的操作称为相位控制。
步进电机的最小转动单位称为步进角,一般为1.8度或0.9度。
通过控制电流的相位控制,可以实现步进电机精确的转动。
2. 步进电机控制器的组成步进电机控制器通常由以下几个组件组成:2.1 电源步进电机控制器需要提供适量的电流和电压来驱动步进电机。
电源可以是交流电源或直流电源,通常需要根据步进电机的需求选择适当的电源。
2.2 电流驱动器电流驱动器作为步进电机控制器的核心部件,负责向步进电机提供恒定的电流,并将控制信号转化为电流信号。
电流驱动器可以根据不同的控制方式分为两种类型:常流驱动器和常压驱动器。
常流驱动器是最常见的电流驱动器类型,它通过调节电压来控制电流大小,保持恒定的电流输出。
常压驱动器则通过调节电流源的电压来输出恒定的电流。
控制器是步进电机控制器的核心部件,它负责接收输入信号,并生成脉冲信号来控制步进电机的旋转。
控制器通常由微处理器或专用的控制芯片组成,它可以接收来自外部设备的命令,并将其转化为脉冲信号,以驱动步进电机按照设定的步进角度旋转。
控制器还可以实现一些额外的功能,如速度调节、方向控制、加减速度控制等。
2.4 接口步进电机控制器通常需要与外部设备进行通信,如计算机、PLC等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
;步数减1为0?
5.3 步进电机控制
正、反转通电状态字表
POINT:DB DB DB DB DB DB DB
01H 03H 02H 06H 04H 05H 00H
DB DB DB DB DB DB DB
01H 05H 04H 06H 02H 03H 00H
;结束字符
;结束字符
5.3 步进电机控制
为了减少每步计算装载值的时间,系统设计时就预先把各离
散点的速度所需的时间常数固化在ROM中,系统运行中用查表的 方法读取所需的装载值,这种方法称为计时法。 计算机通过比较累计规定的电机工作步数后自动增减延时程 序的时间常数,按步数间隔改变电机的工作频率的控制方法称为 计步法。
5.3 步进电机控制
A
双三拍方式——
通电顺序:
AB→BC→CA→AB 旋转方向: 逆时针
C’
B’
B
A’
CHale Waihona Puke 5.3 步进电机控制A
单三拍方式——
通电顺序:
AC→CB→BA→AC 旋转方向: 顺时针
C’
B’
B
A’
C
5.3 步进电机控制
A
三项六拍方式——
通电顺序:
A→AB→B→BC→C →CA →A 旋转方向: 逆时针
N
N
规定定长满否?
到位否? N 定长计数器加1
返回 N 规定定长满否? Y 延时常数+Δ
5.3 步进电机控制
用微机对步进电机进行加减速控制,实际上,就是改变输出 时钟脉冲的时间间隔,升速时,使脉冲串逐渐加密,减速时,使 脉冲串逐渐疏稀。 计算机用定时器中断的方式来控制变速时,就是不断改变定 时器装载的定时时间常数的大小,一般用离散办法来逼近理想的 升降速曲线。
步进电机变速控制
步进电机在工作过程中不能立即启动和立即停止。在启动时应逐 步地加速到一个预定速度,在停止时应提前减速。在一般情况下,系 统的极限起动频率是比较低的,而要求运行的速度往往比较高,如果 系统以要求的速度直接起动,可能发生丢步或根本不运行的情况。为 了在不“丢”步的情况下提高速度,电机在启动时应该速度较小,然 后逐渐加速到接近电机的最高工作频率运行。反之,在到达加工终点 前,电机就逐渐减速,待运行速度降到一定值时再停机,以防止步进 电机由于惯性冲过终点。
步序 1 2 3 4
P1口输出状态 00000001 00000011 00000010 00000110
绕组 A AB B BC
通电状态字 01H 03H 02H 06H
5
6
00000100
00000101
C
CA
04H
05H
5.3 步进电机控制
入口 是正转吗 F0=0? Y 设正转数据指针 R1←#POINT 建立反转数据指针 R0←#POINT
C’
1
B’
4 B
3
2
C
A’
5.3 步进电机控制
A
三项六拍方式——
通电顺序:
A→AC→C→CB→B→BA→A 旋转方向: 顺时针
C’
1
B’
4 B
3
2
C
A’
5.3 步进电机控制
5.3.1 步进电机
步进电机可工作于单相通电方式,也可工作于双相通电方式以及 单相、双相交叉通电方式,选用不同的工作方式,可使步进电机具有 不同的工作性能,诸如减小步距,提高定位精度和工作稳定性等。 步距角θ:
5.3 步进电机控制
步进电机是典型的开环驱动装置,它将插补输出的进给脉冲
转换为具有一定方向、大小和速度的机械转角位移(一个脉冲控
制步进电机走一个脉冲当量),并带动机械部件运动。在机床设 备中,开环伺服系统的精度主要由步进电机决定,速度也受步进
电机性能的限制。但它的结构和控制简单,容易调整,在速度和
精度要求不太高的场合,仍有一定的使用价值。
5.3 步进电机控制
5.3 步进电机控制
A
单三拍方式——
通电顺序:
A→B→C→A 旋转方向: 逆时针
C’
1
B’
4 B
3
2
C
A’
5.3 步进电机控制
A
连续旋转一周
C’
1
B’
4 B
3
2
C
A’
5.3 步进电机控制
A
单三拍方式——
通电顺序:
A→C→B→A 旋转方向: 顺时针
C’
1
B’
4 B
3
2
C
A’
步 进 电
步 进 电机 类 型及 工作 方 式 选 择
DB
机 接
口 步 进 光电 隔离 电机 驱 动 器 A B C 步 进 电机
电路
CB
微型计算机控制步进电机系统框图
5.3 步进电机控制
2.步进电机控制
8051 单片机 P1.2 P1.1 P1.0 控制 信号 步进电 机驱动 器
A B C 步进 电机
N
三 相 六 拍 控 制 程 序 流 程 图
取控制字
Y
是最后一个 控制字? N 输出控制字 Y 调延时子程序 修改控制字地 址
步数到? R0-1=0? Y 返回
N
5.3 步进电机控制
ROUTN:JB F0,LOOP2 MOV R1,#POINT LOOP1:MOV A,@R1 JZ ROUTN MOV P1,A ACALL DELAY INC R1 AJMP LOOP3 LOOP2:MOV ADD MOV AJMP LOOP3:DJNZ RET A,#POINT A,#07H R1,A LOOP1 R0,LOOP1 ;判别正反转 ;建立正转通电状态 字地址 指针 ;读通电状态字 ;结束字符?是,转到ROUTN ;输出通电状态字 ;延时 ;修改通电状态字地址指针 ;建立反转通电状态字地址指针
5.3 步进电机控制
变速控制中频率与步长的关系
f 频率
fe
恒频控制 升频控制 降频控制
L1
L2
L(步长)
5.3 步进电机控制
入口 延时常数<给定量? N 延时 步进电机进给 Y
延时
计 步 法 变 速 控 制 程 序 流 程 图
步进电机进给 步进长度加1 步进长度加1 到减速位否? 定长计数器加1 Y 是高速否? N Y 延时 Y 延时常数-Δ 进给 计数长度加1 Y N
360 Zrm
N为电动机相数;K=1,2,4。 Zr是转子齿数;m是运行拍数,通常等于相数或相数的整数倍,即
m KN
5.3 步进电机控制
5.3.2 步进电机控制 按预定的工作方式分配各个绕组的通电脉冲; 定子绕组通电状态改变速度越快,其转子旋转的速度越快,即通
电状态的变化频率越高,转子的转速越高;
改变定子绕组的通电顺序,将改变转子旋转方向; 控制步进电机的速度,使它绐终遵循加速→匀速→减速的运动规
律工作。
5.3 步进电机控制
1. 步进电机驱动方式
常用的驱动方式是高低压驱动: 电机移步时加额定或超过额定值 的电压,以便在较大的电流驱动 下,使电机快速移步。在锁步时 则加低于额定值的电压。
AB 单 片 机