基于MATLAB电动汽车仿真研究
一种基于Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法一、本文概述无刷直流电机(Brushless DC Motor, BLDC)以其高效率、低噪音、长寿命等优点,在航空航天、电动汽车、家用电器等领域得到广泛应用。
为了对无刷直流电机控制系统进行性能分析和优化,需要建立精确的数学模型并进行仿真研究。
Matlab作为一种强大的数学计算和仿真软件,为无刷直流电机控制系统的建模仿真提供了有力支持。
二、无刷直流电机控制系统原理1、无刷直流电机基本结构和工作原理无刷直流电机(Brushless Direct Current Motor,简称BLDCM)是一种基于电子换向技术的直流电机,其特点在于去除了传统直流电机中的机械换向器和电刷,从而提高了电机的运行效率和可靠性。
无刷直流电机主要由电机本体、电子换向器和功率驱动器三部分组成。
电机本体通常采用三相星形或三角形接法,其定子上分布有多个电磁铁(也称为线圈),而转子上则安装有永磁体。
当电机通电时,定子上的电磁铁会产生磁场,与转子上的永磁体产生相互作用力,从而驱动转子旋转。
电子换向器是无刷直流电机的核心部分,通常由霍尔传感器和控制器组成。
霍尔传感器安装在电机本体的定子附近,用于检测转子位置,并将位置信息传递给控制器。
控制器则根据霍尔传感器提供的位置信息,控制功率驱动器对定子上的电磁铁进行通电,从而实现电机的电子换向。
功率驱动器负责将控制器的控制信号转换为实际的电流,驱动定子上的电磁铁工作。
功率驱动器通常采用三相全桥驱动电路,具有输出电流大、驱动能力强等特点。
无刷直流电机的工作原理可以简单概括为:控制器根据霍尔传感器检测到的转子位置信息,控制功率驱动器对定子上的电磁铁进行通电,产生磁场并驱动转子旋转;随着转子的旋转,霍尔传感器不断检测新的转子位置信息,控制器根据这些信息实时调整电磁铁的通电状态,从而保持电机的连续稳定运行。
由于无刷直流电机采用电子换向技术,避免了传统直流电机中机械换向器和电刷的磨损和故障,因此具有更高的运行效率和更长的使用寿命。
基于MATLAB仿真的纯电动车动力系统匹配研究
2纯 电动 汽车 动力 系统 匹配 的理论 计算 方法
纯 电动汽 车 的动 力性 评价 指标 与传 统 内燃机 汽 车基本 相 同 ,即汽 车 的 最 高车 速 、最大 爬 坡度 和加 速 时 间。用 电机 的额定 外特 性 计算 电动 汽 车 的
最 高车速 ,用 电动机 的 峰值 外特 性 进行 计算 加速 时 间 。采用 峰 值特 性 计算 最大 爬 坡度 则必 须 限定 在短 时运 行 状态 , 即爬坡 时间不 能 大于 峰值 特 性运 行 的时 间 ,如 果 超过 此 时间 则会 导致 电机 驱 动系 统 过热 损坏 。如采 用额 定 特性 计算 爬坡 度 则会 浪 费 电机驱 动 系统 的功 率容 量 。所 以本 文 针对 这两 种
m= 50p 、 T 2N 、T“ 5N 电机 驱 动 系统 效 率 >0 的 区间 大于 电机 运 20 rm  ̄ 8m m= 0m = 8%
着 重要 贡献 。 同 时由于 汽 车尾气 排 放是 城 市大 气污 染 的主 要源 头 , 因此节
能 且零 排放 的 纯 电动汽 车 成为 未来 的发 展 趋势 。 电动汽 车 是 以车 载 电源 为
行 区 间的7% 0 、峰值 外特 性运 行 时间 10 。 8 s
由34 知 ,如 果 采 用 二 档 变 速 器 ,则 要 求 转 矩 为 T≥6N 和 T ≥ .可 N 0m 9N 。通过 市 场调 研 ,若 采用 这 种 电机 ,若 额 定转速 为28 , 则 电机控 制 4E 45 系 统 的额 定功 率为 1k ,峰值 功 率为 2k , 电机 驱动 系 统 的价 格 会 大幅提 6w 5w
低 , 电机 系统 总体 效率 在7% 右 。 7左
2 1 以最高 车速确 定 电机 的额 定功率 .
基于MATLABSimulink的电动汽车再生制动仿真
— ——地面附着系数;
续同向运转,电动机处于发电状态,电流方向为 M—
C—R,由于 T的开关频率较高,可近似认为此时电动
02
2
机转速不变,则此阶段结束时回路中电流(#on/A)为:
# !" % on &
'(#1'
% &
)#(( &$))*on
(2)
其中:%=!e"1
式中:"1—— —电流反向阶段电动机转速,r/min;
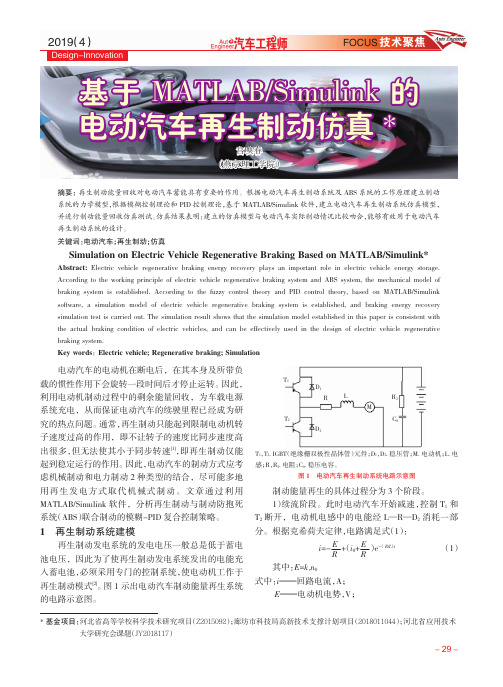
电动汽车的电动机在断电后,在其本身及所带负
T1
载的惯性作用下会旋转一段时间后才停止运转。因此,
D1
利用电动机制动过程中的剩余能量回收,为车载电源
#"
R2
系统充电,从而保证电动汽车的续驶里程已经成为研 究的热点问题。通常,再生制动只能起到限制电动机转 子速度过高的作用,即不让转子的速度比同步速度高
T2 D2
入蓄电池,必须采用专门的控制系统,使电动机工作于
[2]
再生制动模式 。图 1示出电动汽车制动能量再生系统
的电路示意图。
1)续流阶段。此时电动汽车开始减速,控制 T1和
T断开,电动机电感中的电能经 "—#—$ 消耗一部
2
2
分。根据克希荷夫定律,电路满足式(1):
!%!
" #
$(!0$
" %
)&&( %'')(
2019(4)
Design-Innovation
技术聚焦
基于 ()*")+,-./01.23 的 电动汽车再生制动仿真 4
宫唤春
(燕京理工学院)
基于MATLAB的新能源汽车仿真实例

在电池管理系统的章节中,作者详细阐述了如何利用MATLAB对电池的充放电 过程进行模拟。通过调整不同的参数,如电流、电压和温度,读者可以深入了解 电池性能的变化,为实际的新能源汽车设计提供有力支持。
书中还重点介绍了电动汽车的电机和控制系统。电机作为新能源汽车的心脏, 其性能直接影响到车辆的整体表现。通过MATLAB的电机仿真模型,我们可以预测 在不同工况下电机的性能表现,从而优化设计。
内容摘要
该书还介绍了如何使用MATLAB进行实车试验数据的处理和分析,以及如何使用MATLAB进行模型 的可视化和优化等方面的内容。这些内容都是实际研发过程中不可或缺的重要环节。 《基于MATLAB的新能源汽车仿真实例》这本书是一本非常实用的书籍,适合于从事新能源汽车研 发的工程师和技术人员阅读和使用。通过学习这本书,读者可以快速掌握使用MATLAB进行新能源 汽车仿真的方法和技巧,提高研发效率和质量。
除了硬件部分,书中还涵盖了新能源汽车的能量管理策略。如何有效地分配 电能,使得车辆在保证性能的同时,实现更长的续航里程,是能量管理策略的核 心问题。通过MATLAB的仿真,我们可以对不同的策略进行比较和优化,为实际应 用提供最佳方案。
书中一个特别引人注目的是关于充电基础设施的仿真部分。除了电池和电机, 充电设施同样是新能源汽车发展中不可或缺的一环。通过仿真,我们可以模拟不 同类型的充电设施在不同场景下的性能表现,为充电网络的规划和建设提供决策 依据。
作者简介
作者简介
这是《基于MATLAB的新能源汽车仿真实例》的读书笔记,暂无该书作者的介绍。
感谢观看
仿真方法是实现新能源汽车仿真的关键技术。在仿真方法这一章节中,目录 列举了多种常用的仿真软件和工具,并对其优缺点进行了比较分析。还介绍了如 何根据实际需求选择合适的仿真软件和工具,为读者在实际操作中提供了指导。
纯电动汽车动力性经济性仿真分析和试验

纯电动汽车动力性经济性仿真分析和试验发布时间:2023-01-31T07:40:24.398Z 来源:《中国科技信息》2022年第18期作者:钱涛[导读] 文章结合纯电动汽车的基本情况,对纯电动汽车的基本情况进行分析钱涛安徽江淮汽车集团股份有限公司安徽合肥 231200摘要:文章结合纯电动汽车的基本情况,对纯电动汽车的基本情况进行分析,然后再对纯电动汽车的动力性经济性进行详细分析,通过仿真分析和试验进行研究,保证工作中能够做好纯电动汽车的合理分析,使得纯电动汽车在工作中,能够发挥相应功能和作用的服务能力,所以,需要对纯电动汽车的动力性经济性仿真分析和试验进行研究,主要对纯电动汽车的仿真模型建立和运算进行分析,选择Simulink仿真分析平台,实现对纯电动汽车的动力性经济性仿真分析和试验工作,进而进一步提升纯电动汽车的服务能力,使得纯电动汽车能够更好地为人们提供服务。
满足人们出行的基本需求,进一步推动人们生存品质实现合理的提升。
关键词:纯电动汽车;动力性;经济性;仿真分析;试验纯电动汽车是一种以车载电源为动力的汽车,它不需要对化石能源进行利用,仅需要对电能进行利用,通过电能的合理运用,实现纯电动汽车的稳定运行,确保纯电动汽车的功能和服务作用。
为了满足对纯电动汽车的动力性经济性的分析,需要采取仿真分析和试验的方式,实现纯电动汽车的合理分析,并选择合理的仿真分析和试验方式,促使纯电动汽车的动力性经济性实现合理的分析,进而更好地为人们提供服务。
基于此,文章结合纯电动汽车动力性经济性的仿真分析和试验进行研究,确保经过仿真分析后,能够实现对纯电动汽车的动力性经济性实现合理的分析,选择合理的动力系统,促使纯电动汽在服务过程中,能够发挥相应的功能和服务作用,进一步推动电动汽车的功能和服务作用。
1.纯电动汽车相关研究在资源使用相对过多的今天,资源利用限度逐渐降低,所以,为了满足资源节约的基本需求,可以对纯电动汽车进行合理的运用,发挥纯电动汽车的功能和作用,进一步实现对传统能源的合理节约,使得资源的利用价值实现合理改善,进一步发挥资源的利用率。
基于Cruise的纯电动汽车建模及仿真研究

基于Cruise的纯电动汽车建模及仿真研究Modeling and simulation of pure electric vehicles based on Cruise朱红军1 李智豪21.江苏金彭集团有限公司,江苏 徐州 2110112.安徽工程大学智能汽车线控底盘系统安徽省重点实验室,安徽 芜湖 241000摘要:为了缩短纯电动汽车设计开发周期,采用基于Cruise与MATLAB/SIMULINK联合仿真的方法,依据仿真试验结果对所选电机及所设计控制策略运行状态进行分析。
首先,运用Cruise软件搭建纯电动汽车仿真模型;其次,在MATLAB/SIMULINK中建立纯电动汽车控制策略;最后,通过两者的联合仿真,在多个工况下分析车速跟随情况、电机转速及扭矩、电池荷电状态(state of charge,SOC)值变化情况,进而分析控制策略与所选电机运行状况是否匹配,缩短整车电机选型、控制策略设计及开发的周期。
关键词:纯电动汽车;Cruise;联合仿真;控制策略中图分类号:U469.72 文献标识码:A0 引言随着国内外新能源汽车产业的蓬勃发展,市场对新能源汽车的产品设计提出新要求,因此汽车更新迭代速度极快[1]。
在新能源汽车开发过程中,缩短设计、试制和试验周期,提高产品设计准确性与快速审计对抢占汽车市场先机具有重要意义[2]。
本文基于某款纯电动汽车车型,搭建仿真模型,通过分析计算结果来评估整车所选电机及控制策略是否满足设计需求。
首先,利用Cruise软件完成纯电动汽车建模设计。
其次,利用MATLAB/ SIMULINK软件进行控制策略设计。
基于两个软件的联合仿真功能,建立多工况下的模拟仿真任务。
通过分析仿真试验结果,判断所选电机及控制策略是否合理。
最后,依托试验结果来验证电机选型和控制策略是否需要调整,避免在开发过程中盲目进行电机选型和控制策略设计,从而缩短开发周期[3]。
1 纯电动汽车结构及参数该纯电动汽车动力系统主要由电机、动力电池、单挡变速箱、电耗元件、驱动桥和车轮组成(图1)。
基于CarSim和Matlab四轮独立驱动轮毂电机电动汽车驱动控制系统的研究
基于CarSim和Matlab四轮独立驱动轮毂电机电动汽车驱动控制系统的研究作者:梅鸣来源:《山东工业技术》2016年第21期摘要:针对四轮独立驱动轮毂电机电动汽车驱动控制系统进行了建模与仿真,在传统PID 的基础上引入SOA智能优化算法,最后验证了所建立的CarSim和Matlab车辆模型的合理性。
关键词:电动汽车;驱动控制系统;车辆模型;SOA智能优化算法DOI:10.16640/ki.37-1222/t.2016.21.1630 引言近年来,绿色环保与可持续发展成为日益重要的发展理念。
本文研究的轮毂电机驱动电动汽车在现有商用化电动汽车的基础上省略了减速器、差速器和传动轴等机械零部件部件,直接由整车控制器发出控制信号直接控制车轮,这样节省车内空间,更容易实现电动车的微型化、轻量化[1-2]。
本文将CarSim中的内燃机模型和传动系统模型,修改为毂电机模型,在Matlab/Simulink中搭建电机模型和控制系统模块,在联合CarSim进行联合仿真。
1 四轮轮毂电机电动汽车建模在Matlab/Simulink中搭建轮毂电机模型,去掉CarSim中的传统内燃机汽车模型,通过Matlab/Simulink和CarSim联合仿真,搭建出四轮独立驱动轮毂电机电动汽车整车模型。
1.1 轮毂电机建模轮毂电机无刷直流电机,其主要由电机本体、霍尔位置传感器和电子逆变器构成。
无刷直流电机数学模型形式可表示为:其中ea,eb,ec分别表示定子a,b,c三相生成的梯形反电动势。
电磁转矩方程为:式中:Te为电磁转矩;w为电机角速度;Tl为负载转矩;J为转动惯量;B为黏滞摩擦系数;ua,ub,uc为绕组电压,ia, ib,ic为相电流;ea,eb,ec为相反电势;L为相绕组自感系数;M为相绕组互感系数。
式(1)、式(2)和式(3)共同构成了无刷直流电机的微分方程数学模型。
采用基于SOA的PID控制算法来控制轮毂电机,1.2 整车模型搭建打开CarSim 8.02 软件,选择B-Class, Hatchback选项作为基准车辆,将CarSim中原有的内燃机模型改为 4-wheel drive(四轮驱动),其内容定义为选择No dataset select方式,同时将四轮驱动转矩设置为车辆模型的输入量变量。
基于Matlab/Simulink的混合动力客车前向式仿真平台的建立
摘 要: 建立 某型号并联式混合动 力客车的前 向式仿真平 台, 于 Maa/i ik环境在标准道路行驶循 基 tbSn n l ml 环 下对其进行仿 真 , 以分析整车动 力性 与经济性。结果表 明 , 该车性能满足设计要求。
关 键 词 : t b Smuik; 合 动 力客 车 ; 向式 仿 真 Mal / i l 混 a n 前
E E E D (o )2 C + U CLw 3 况下进行仿 真【 工况跟 随验证结果 姗,
如图 6所示 。
际车速与参考 车速一致[ 9 1 。驾驶 员模 型采用 P 算法 , I 以
减少非 线性动力系统带来 的误差 。以参考车速 “ 耐与实
际车速 U 的差值为输入 , 得到整 车附加力 , 再加 上
3
V
=
R
—
c
R
— —
c
V
[
-
R 】 一 器
目
蓄 电池组 的散热方式是风 冷 , 每个箱体 中采用并行
通风的方式 。假设 每个蓄 电池模 块 的空气 流量相等 , 建
t 立简化 的蓄 电池热模 型。 r 为蓄 电池 内阻 ; 设 B P 船为蓄
_
置
水
电池温度 ; 为散热空气温度 ; B为 蓄电池 平均 比热 ; f Cp
容 ,反映蓄 电池 中储 存
电 能能力 的大小 ; C 和
f
1) { 0
0
反 映 蓄 电池 表 面 效
应 ; 表示 蓄 电池 的终
图 2 发动机万有特性 M P图 A
= = f } = = c c
L — — — — —1 一 —————.— —
—
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 7 纯电动汽车能量(每秒)流动图
驱动汽车行驶所需的能量为: P 驱动 =F 驱动×v
电机及其控制器的效率根据公式:
(29)
图 8 电机效率图
假设齿轮系统的效率已知,那么:
P
电机输入
=
P电机输出 ηm
(31)
P
电机输出
=
P驱动 ηg
(11)
dv dt
=3.27-0.0005386v2
(12)
取时间步长 δt,有: Vn+1=Vn+δt(3.27-0.0005386V2n)
(13)
当 6.6m/s < v < 20m/s 时,有
ng
G r
T
电机
=μrrmg+0.625ACdv2+ma+I
G2 ηgr2
a
0.95×113×
530.5 v
技术纵横 5
Fωa=
G r
Tωa=
G r
IG
a r
=I
G2 r2
a
(6)
根据电机的工作特性[4]可知,当电机转速低于临
界转速时,电机恒扭矩输出;当电机转速超过临界转
速时,电机的输出转矩随着电机转速的上升而下降。
对于无刷直流电机而言,电机输出扭矩随电机转速
的上升而线性下降;对于其它形式的电机而言,电机
电池开路电压为 E,且 DoD=0 时,E = 2.15V;DoD=1
时,E = 2.00V。则根据此线性关系得铅酸蓄电池组
的开路电压和端电压分别为:
E=n×(2.15-DoD ×(2.15-2.00))
(18)
V=E-I×Rin
Rin=
n×0.022 C10
Ω
(19) (20)
式中 n —— —该密封型铅酸蓄电池组所包含的电体
图 1 电机 - 轮胎模型
托任何模块化建模仿真软件,从构建最基本的数学 模型出发,编写程序代码,最后进行仿真并给出相 应的仿真结果。
1 纯电动汽车加速性能建模仿真
1.1 电机 - 轮胎模型
由图 1 可知,牵引电机的输出扭矩 T 电机和地面
作用在车轮上的驱动力 F 驱分别为:
T
电机
=
F驱r G
(1)
F
电池个数
Rin—— —蓄电池组等效内阻 依据蓄电池 Peukert 模型[6]公式有:
Cp=Ik×T
(21)
其中,I 表示蓄电池恒定放电电流;T 表示蓄电
池由满充状态持续放电至蓄电池耗尽的总时间;Cp
表示 Peukert 容量,近似等于蓄电池的最大容量(蓄
电池容量与其放电电流大小有关,当蓄电池以 1A
恒定电流放电时所得的蓄电池容量最大);k 表示
Peukert 系数,对铅酸蓄电池有 k=1.12。
取时间步长 δt,则(n+1)时刻纯电动汽车从蓄电 池组中释放出的总电容量和放电深度分别为:
k
Cn+1=Cn+
δ1×I 3600
Ah
(22)
DoDn=
Cn Cp
(23)
设 有 端 电 压 12V 的 密 封 型 铅 酸 蓄 电 池 组 ,
引言
运用 ADVISOR[1]、CRUISE[2]等专业仿真工具对 所设计的电动或混合动力汽车进行性能仿真,初步 验证其各动力性能参数是否满足要求,已成为电动 或混合动力汽车前期设计的基本步骤。
ADVISOR、CRUISE 等仿真工具基于模块化的 建模理念,用户可以根据需要,便捷地搭配不同布置 结构的车辆模型,其复杂完善的求解器可以确保计 算精度和速度。人性化的操作界面在方便设计人员 使用的同时,也隔离了设计人员与软件中各子模块 内 核(底层代码)之间的联系,不利于工程师们按 需修改和创建模块。本文基于 MATLAB[3]环境,不依
迎风面积;ρ 表示空气密度;Cd 表示空气阻力系数; v 表示车速;ψ 表示坡度角;a 表示汽车加速度;I 表
示电机的转动惯量;G 表示电机至轮胎的传动比;r
表示车轮半径;ηg 表示电机到车轮间机械传动系统 总效率。
1.3 电动汽车加速度仿真
一旦选定纯电动汽车的各项参数,则可由汽车
驱动力平衡方程式列出其加速时的数学模型,它是
kc 表示铁损系数;kiω 表示电机铁损;ki 表示铁损系 数;kωω3 表示电机风阻损耗;kω 表示风阻系数;C
表示电机的固定损耗。各系数取值依据所选电机而
定 ,这 里 分 别 取 kc=0.3、ki=0.01、kω=0.000005、固 定
损耗 C=600。
图 5 FUDS 车辆运行工况
图 6 SFUDS 车辆运行工况
设该纯电动轻型商用车 P 附 =2500W,铅酸蓄电
池组放电深度上限值为 DoD=0.65,综合该纯电动汽
车各模块数学模型并编写 MATLAB 仿真代码,得仿
真结果如图 10 所示。
3结论
本文立足于纯电动汽车各部件的数学模型,在 MATLAB 环境下进行纯脚本语言编程对各主要部 件进行建模仿真并给出相应的仿真结果。最后以纯 电动版某轻型商用车为例,对其加速性能和续驶里
4 技术纵横
技术纵横
设计·研究
轻型汽车技术 2010(3)总 247
基于 MATLAB 电动汽车仿真研究
刘某兴 阮米庆 王 晨
(南京航空行天大学能源与动力学院)
摘要 针对目前电动汽车领域大量使用 ADVISOR、CRUISE 等专业性能仿真工具进行前 期设计的现状,描述了一种独立于 MATLAB/SIMULINK 模块,完全依托 MATLAB 编 程语言所构建的纯电动汽车数学模型以及各个子模块模型,解决了传统设计人员不能与 专业仿真软件中各模块底层代码交互的问题。本文以某纯电动轻型商用车为例,构建其 蓄电池模型并仿真出其恒电流、恒功率放电曲线以及整车加速性能曲线和在 SFUDS 车 辆运行工况下的续驶里程。 关键词:电动汽车 仿真 MATLAB
示:
图 4 密封型铅酸蓄电池组恒功率放电
一旦纯电动汽车发生再生制动,蓄电池从汽车
的动能中获得的瞬时功率和蓄电池的瞬时充电电
流分别为:
P=V×I=(E-IRin)×I=EI-RinI2
(26)
姨2
I= -E+
E +-4RinP 2Rin
(27)
所以取时间步长 δt,在(n+1)时刻,若纯电动汽 车发生再生制动,此时蓄电池组释放出的总电容量
F 驱 =Frr+Fad+Fhc+F1a+Fωa
(9)
2
F 驱 =μrrmg+0.625ACdV2+mgsin(ψ)+ma+I G 2 a ηgr
(10)
式中,Frr 表示滚动阻力;Fad 表示空气阻力;Fhc 表 示爬坡阻力;Fla 表示加速阻力;Fωa 表示克服旋转质 量加速时的旋转惯性矩所需的等效驱动力;μrr 表 示滚动阻力系数;m 表示汽车总质量;A 表示汽车的
驱
=
G r
T 电机
(2)
根据车速 v 和车轮半径 r 得牵引电机的旋转角
速度和角加速度分别为:
ω=G
v r
(3)
ω=G
a r
(4)
汽车加速时旋转质量(主要是牵引电机)加速
旋转,需克服的惯性力偶矩和该力偶矩等效在车轮
上的驱动力分别为:
Tωa=I·ω=IG
a r
(5)
轻型汽车技术 2010(3)总 247
(24)
姨2
I= E- E -4RinP 2Rin
(25)
P 表示蓄电池组的输出功率;V 表示蓄电池组
的端电压;I 表示蓄电池组的放电电流;Rin 表示蓄电 池组的等效内阻。
利用 MATLAB 对装备在上述纯电动轻型商用
车上的铅酸蓄电池组进行恒功率放电建模仿真,得
蓄电池组端电压与放电时间之间的关系,如下图所
一个关于车速 v 的一元一阶微分方程。
设有某纯电动轻型商用车一辆,整车整备质量
23 12V 密
封型铅酸蓄电池组,额定电压 288V;空气阻力系数
Cd=0.5;滚动阻力系数 μrr=0.015;将汽车加速时需克 服的旋转质量的旋转力偶矩折合到平移质量上,得
该纯电动轻型商用车的加速度曲线如下:
图 2 加速度曲线
2 纯电动汽车续驶里程建模仿真
2.1 蓄电池建模仿真
6 技术纵横
轻型汽车技术 2010(3)总 247
对蓄电池建模仿真的目的是为了预测电动汽车
的行驶性能,包括续驶里程、加速性能、车速等。对于
密封型铅酸蓄电池,开路电压与蓄电池的放电深度
成线性关系[5]。设蓄电池的放电深度为 DoD,其单体
为:
Cn+1=Cn-
δt×Ik 3600
Ah
(28)
2.2 车辆运行工况
车辆行驶在路面上,不同的路面情况对应着不
同的道路谱[7]。权威机构根据各地的交通路况建立
其车辆运行工况,如洛杉矶城市运行工况 LA-4cy-
cle、联邦城市运行工况 FUDS、SFUDS(简化版)等。
它们描述了一定时间范围内的车速随时间的变化
参考文献 1 张翔, 钱立军, 张炳力, 赵韩. 电动汽车仿真 软件进展[J]. 系统仿真学报, 2004, 16(8): 1621~1623 2 汪斌, 李峥. CRUISE 软件在混合动力汽车 性能仿真中的应用[J]. 计算机应用, 2007, 5(9): 38~ 40 3 Steven T.Karris. Introduction to Simulink with Engineering Applications [M]. Orchard Publications. 2006 4 杨耕, 罗应文. 电机与运动控制系统[M]. 北 京: 清华大学出版社, 2006 5 Sandeep Dhameja. Electric Vehicle Battery Systems[M]. Newnes. 2002 6 刘广林. Peukert 方程的研究[J]. 电源技术, 1990, 1: 13~18 7 Qidong Wang, Hong Huo. Characterization of vehicle driving patterns and development of driving cycles in Chinese cities[J]. Transportation Research D, 2008, 13: 289 ̄297 8 James Larminie, John Lowry. Electric Vehicle Technology Explained [M]. John Wiley & Sons, Ltd. 2003