状态反馈控制系统的设计与实现知识分享
状态反馈实验报告总结(3篇)
第1篇一、实验背景在现代控制理论中,状态反馈是控制系统设计中的重要方法之一。
它通过将系统的状态信息反馈到控制输入,实现对系统动态特性的调节和优化。
本实验旨在通过MATLAB软件,验证状态反馈在控制系统设计中的应用,并分析其效果。
二、实验目的1. 理解状态反馈的原理和设计方法;2. 掌握状态反馈在控制系统中的应用;3. 分析状态反馈对系统性能的影响;4. 比较不同状态反馈策略的优劣。
三、实验内容1. 系统模型建立:根据实验要求,建立被控对象的传递函数模型。
2. 状态反馈设计:采用极点配置法,将闭环系统的极点配置在期望的位置上,实现状态反馈。
3. 仿真分析:通过MATLAB软件进行仿真实验,分析不同状态反馈策略对系统性能的影响。
4. 结果比较:比较不同状态反馈策略的优劣,总结实验结论。
四、实验步骤1. 系统模型建立:根据实验要求,建立被控对象的传递函数模型。
2. 状态反馈设计:根据极点配置法,确定闭环系统的极点位置,设计状态反馈控制器。
3. 仿真分析:在MATLAB软件中,搭建仿真模型,设置不同状态反馈策略,进行仿真实验。
4. 结果比较:分析仿真结果,比较不同状态反馈策略的优劣。
五、实验结果与分析1. 系统模型建立根据实验要求,建立被控对象的传递函数模型如下:G(s) = 1 / (s^2 + 2s + 2)2. 状态反馈设计采用极点配置法,将闭环系统的极点配置在期望的位置上,设计状态反馈控制器如下:K = [k1, k2]其中,k1和k2为待定系数。
通过求解以下方程组,确定k1和k2的值:(sI - A - BK)^-1B = C其中,A为系统矩阵,B为输入矩阵,C为输出矩阵,I为单位矩阵。
3. 仿真分析在MATLAB软件中,搭建仿真模型,设置不同状态反馈策略,进行仿真实验。
(1)无状态反馈将K置为零,观察系统响应。
(2)状态反馈根据上述设计的控制器,设置不同的k1和k2值,观察系统响应。
4. 结果比较通过仿真实验,比较不同状态反馈策略的优劣。
离散控制系统中的状态反馈控制方法

离散控制系统中的状态反馈控制方法离散控制系统中的状态反馈控制方法是一种广泛应用于工程控制领域的控制策略。
它通过测量系统的状态变量,并将其与期望的状态进行比较,从而计算出一个控制输入,以实现对系统的稳定性和性能的调节。
在本文中,我们将深入探讨离散控制系统中的状态反馈控制方法的原理、实施步骤和应用案例。
一、状态反馈控制方法的原理在离散时间下,控制系统的动态特性可以用差分方程表示。
状态反馈控制方法基于系统状态的测量,通过将系统状态的线性组合作为控制输入,使系统的状态跟踪期望状态或达到最优性能指标。
该方法的基本原理是将系统的输出反馈回系统中,通过调节反馈增益,实现对系统状态的控制。
二、状态反馈控制方法的实施步骤1. 系统建模:首先需要将实际系统建模为离散时间的差分方程形式。
根据实际情况和控制要求,选择适当的状态变量来描述系统动态特性。
2. 设计控制器:在建立系统模型后,需要设计一个适当的控制器来实现状态反馈控制。
控制器的设计可以基于线性二次调节(LQR)方法或者其他现代控制理论,以满足系统的性能要求。
3. 计算反馈增益:根据系统模型和控制器的设计,利用线性代数方法或者离散系统理论计算反馈增益矩阵。
该增益矩阵将系统测量的状态变量与期望状态进行比较,并计算出控制输入。
4. 实施控制策略:将计算得到的反馈增益矩阵应用于系统中,实现控制输入的计算和控制动作的实施。
通常,这需要使用数字计算设备或者嵌入式控制器来实现。
5. 系统调试和优化:在实施控制策略后,对系统的性能进行评估和调试。
根据实际情况和控制目标,对系统参数进行调整和优化,以达到更好的控制效果。
三、状态反馈控制方法的应用案例状态反馈控制方法已广泛应用于各个领域的工程控制系统中。
以下是其中几个典型案例:1. 机械系统控制:在机械系统中,通过对位置、速度等状态变量的测量,利用状态反馈控制方法可以实现精确的位置控制和运动轨迹跟踪。
2. 机器人控制:在机器人控制系统中,通过对机器人关节角度和位置等状态的测量,运用状态反馈控制方法可以实现机器人的姿态控制和轨迹跟踪。
自动控制原理实验四状态反馈设计报告

实验四、状态反馈设计一、实验目的1.掌握用状态空间法建立系统模型的方法。
2.掌握用状态反馈法进行极点配置的方法。
二、实验内容被控原系统如下图8-1所示,x1、x2为状态变量,以该状态变量建立系统的状态方程,用状态反馈法对原系统进行极点配置,期望性能为:Mp≤5%,tp≤0.5秒。
图8-1 被控原系统图8-2 极点配置后系统三、实验步骤1.建立状态空间模型。
2.从期望的性能指标,求出2阶系统的期望极点。
3.按照状态反馈法,设计反馈回路的参数。
4.在MA TLAB环境下,对极点配置后的系统性能进行仿真验证。
四、实验报告要求1.实验前进行理论设计,写出详细设计步骤。
2.记录实验有关数据及图表。
3.实验数据分析。
原系统:超调量: pos =16.0122上升时间: tr =1.7121调节时间:ts2 =7.8980峰值时间:tp =3.6980进行极点配置的计算:1.判断系统是否能控:跟根据原系统的传递函数,可得出A阵为,A = [ 0 1; -1 -1]A的转置为A’= [-1 0; -1 1]B阵为:b = [0; 1]C阵为:c = [1 0]Rank[Sc ]= Rank [A A*b]=2,为满秩,所以,系统可控。
Rank[ A ; A*c ]=2 为满秩,所以,系统可观测。
2.根据matlab程序计算出期望的极点:程序如下(其中超调取4%,峰值时间取0.45s)a=[0.1:0.01:0.99]; %%求出阻尼比,Wn;MP=exp(-pi.*a./sqrt(1-a.*a));a1=spline(MP,a,0.04)wn=pi./(0.45*sqrt(1-a1*a1))r=[1 2*wn*a1 wn*wn];g1=roots(r)A=[0 1;-1 -1] %%判断能控性b=[0;1]c=[1 0]Sc=[b A*b]rankk=rank(Sc)Ss=[c;c*A] %%判断能观察性rankkk=rank(Ss)k=[wn*wn-2*wn*a1-2 2*wn*a1-1] %%状态反馈增益阵[pos_1,tr_1,ts2_1,tp_1]=stepchar(t,y1) %%原系统与设计后系统的性能参数[pos_2,tr_2,ts2_2,tp_2]=stepchar(t,y2)得出:阻尼比a1 =0.7156wn =9.9952期望的极点为:S1=-7.1531 + 6.9813iS2=-7.1531 - 6.9813i所以,期望特征方程为:f*(s)=(S+7.1531)2+6.98132设:K=[k1 k2]反馈系统的特征方程为:f(s)=| SI-(A-b*k)|=[S -1; 1+k1 S+1+k2]=S2+(1+k2)S+(1+k1)令:f*(s)=f(s)求出K阵得出K=[83.5989 13.3061]极点配置后的系统:极点配置后系统性能指标:超调量:pos =4.1063上升时间:tr =0.1682调节时间:ts2 =0.5858峰值时间:tp =0.4754原系统与极点配置后系统比较:。
控制器设计中的状态反馈方法研究

控制器设计中的状态反馈方法研究引言在控制器设计中,状态反馈方法是一种广泛应用的技术。
它通过实时监测被控对象的状态,将其反馈给控制器,从而实现对被控对象的精准控制。
本文将着重研究控制器设计中的状态反馈方法。
一、状态反馈的原理状态反馈技术是基于被控对象的状态量进行控制的一种方法。
通常,对于某个被控对象,我们需要知道它的状态才能控制它。
获得被控对象的状态可以采用传感器或测量设备等手段进行实时监测。
将获得的状态反馈给控制器后,控制器就能根据当前状态量的信息计算出一个控制信号,并通过执行机构对被控对象进行控制。
这样就实现了对被控对象的精准控制。
二、状态反馈的分类1. 全反馈与局部反馈全反馈是指系统中所有的状态量都被采集到并用于设计控制器,因此也被称为全状态反馈。
全反馈能够有效控制系统,但增加了硬件和软件的复杂度。
局部反馈则只使用系统部分状态信息进行设计,其主要应用于大型系统中,减少成本和提高控制度。
2. 直接反馈与间接反馈直接反馈是指将被控对象的输出量作为反馈信号输入到控制器中,直接进行调节。
间接反馈则是通过测量被控对象状态来计算输出量,进而进行反馈调节。
三、状态反馈的应用1. 电子电气系统的控制在电子电气系统的控制中,状态反馈技术被广泛应用。
例如,在直流电机控制中,通过采集电机电流和角度来实时监测电机状态,从而实现对电机转速和转向的精准控制。
2. 机械工程中的控制在机械工程中,状态反馈技术同样是一种常用技术。
例如,在飞机自动驾驶系统中,通过实时监测飞机状态,将监测结果反馈给控制器,实现对飞机飞行姿态和高度的自动控制。
3. 医疗器械中的应用在医疗器械中,常常需要按照生理状态对人体进行精准控制。
这就需要采用状态反馈技术。
例如,在人工呼吸器控制中,通过实时监测患者的呼吸状态,将监测结果反馈给人工呼吸器,从而实现对患者的呼吸进行精准控制。
结论状态反馈是一种应用广泛的技术,它通过实时监测被控对象的状态,将监测结果反馈给控制器,实现对被控对象的精准控制。
(完整版)状态反馈控制器的设计
(完整版)状态反馈控制器的设计上海电⼒学院实验报告⾃动控制原理实验课程题⽬:状态反馈控制器的设计班级:姓名:学号:时间:⼀、问题描述已知⼀个单位反馈系统的开环传递函数为,试搭建simulink 模型。
仿真原系统的阶跃响应。
再设计状态反馈控制器,配置系统的闭环极点在,并⽤simulink 模型进⾏仿真验证。
⼆、理论⽅法分析MATLAB提供了单变量系统极点配置函数acker (),该函数的调⽤格式为K=place ( A,b,p)其中,P为期望闭环极点的列向量,K为状态反馈矩阵。
Acker ()函数时Ackerman 公式编写,若单输⼊系统可控的,则采⽤状态反馈控制后,控制量u=r+Kx 。
对于多变量系统的状态反馈极点配置,MATLAB也给出了函数place (),其调⽤格式为K=place ( A,B,P)状态反馈是将系统的状态变量乘以相应的反馈系数,然后反馈到输⼊端与参考输⼊叠加形成控制量,作为受控系统的输⼊,实现闭环系统极点的任意配置,⽽且也是实现解耦和构成线性最优调节器的主要⼿段。
只要给定的系统是完全能控且能观的,则闭环系统的极点可以通过状态反馈矩阵的确定来任意配置。
这个定理是⽤极点配置⽅法设计反馈矩阵的前提和依据。
在单输⼊,单输出系统中,反馈矩阵有唯⼀解,且状态反馈不改变系统的零点。
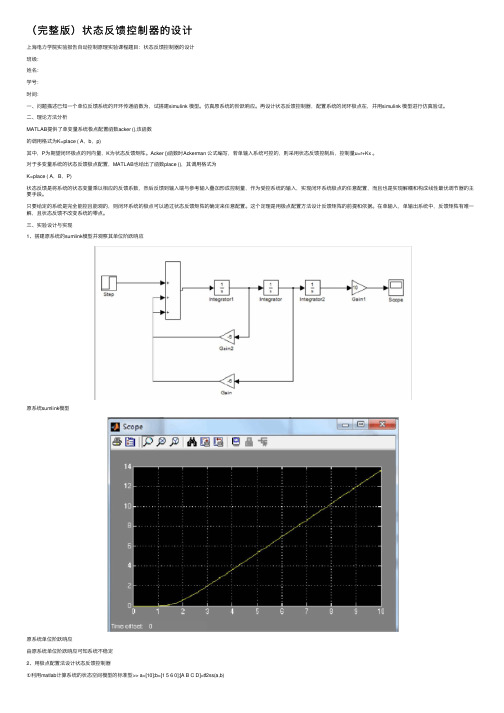
三、实验设计与实现1、搭建原系统的sumlink模型并观察其单位阶跃响应原系统sumlink模型原系统单位阶跃响应由原系统单位阶跃响应可知系统不稳定2、⽤极点配置法设计状态反馈控制器①利⽤matlab计算系统的状态空间模型的标准型>> a=[10];b=[1 5 6 0];[A B C D]=tf2ss(a,b)A = -5 -6 01 0 00 1 0B = 1C = 0 0 10③系统能控性矩阵>> uc=ctrb(A,B)uc = 1 -5 190 1 -50 0 1 >> rank(uc) ans = 3 所以系统完全能控③系统能观型矩阵>> vo=obsv(A,C) vo = 0 0 100 10 010 0 0 >> rank(vo) ans = 3 所以系统完全能观所以可以⽤极点配置法设计状态反馈控制器④求解系统反馈矩阵>> p=[-3 -0.5+j -0.5-j];k=acker(A,B,p)k = -1.0000 -1.7500 3.7500 加⼊反馈后的系统闭环极点为:>>sysnew=ss(A-B*k,B,C,D);pole(sysnew)ans = -3.0000-0.5000 + 1.0000i-0.5000 - 1.0000i⑤搭建加⼊反馈控制器后系统的sumlink模型⑥观察新系统的单位阶跃响应四、实验结果分析加⼊反馈控制器后系统的闭环极点在,符合题⽬要求。
状态反馈设计与实现

Y (s) S n bn1S n1 b1S b0 R(s) S n an1S n1 a1S a0
当t(s0)、a0=b0时:RY((ss)) =
b0 a0
=1
加状态反馈后系统闭环传递函数:
Y (s)
K /T
R(s)
S
2
1 T
(1
k2
)S
1 T
[K
(k1
1)
k2
]
L=[K(k1+1)+k2]/K
r
L
u
-++ -
1 x2
S
K x1 y
TS 1
+++
k2
k1+1
状态反馈系统实验结构图
A组:=0.5,n=10,
k1=8,k2=9
B组:=0.7,n=10,
k1=10,k2=-6
Rf 100 k(900k)
2μ
100 k
5. 整理导线。
r
L
++ --
B
X
+++-
1 S
X
L=[K(k1+1)+k2]/K
A
y
C
k
状态反馈系统结构图
X =( A-Bk) X + B (Lr) ; y=CX ; k=[ k1 k2 ]
特征方程: ∣S I - ( A – B k ) ∣= 0
S
2+
1 T
(1+k2)
S
+
1 T
[K
(k1+1)+k2]
离散控制系统中的状态反馈控制
离散控制系统中的状态反馈控制在离散控制系统中,状态反馈控制是一种常用的控制策略。
它通过测量系统的状态并将其作为反馈信号,采取相应的控制动作来实现系统性能的优化。
本文将介绍离散控制系统中的状态反馈控制原理、设计方法和应用场景。
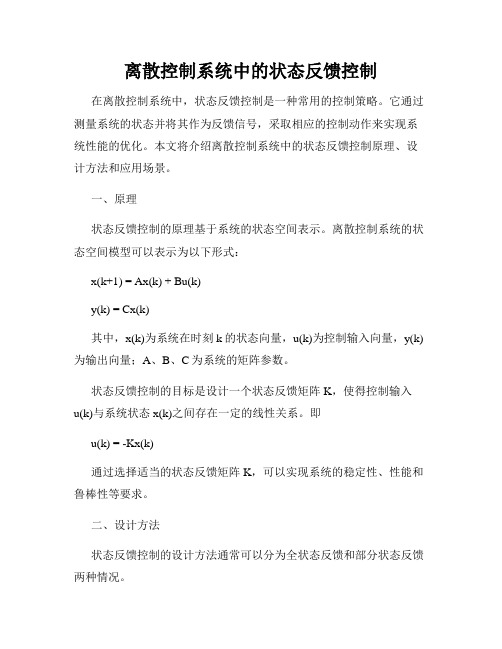
一、原理状态反馈控制的原理基于系统的状态空间表示。
离散控制系统的状态空间模型可以表示为以下形式:x(k+1) = Ax(k) + Bu(k)y(k) = Cx(k)其中,x(k)为系统在时刻k的状态向量,u(k)为控制输入向量,y(k)为输出向量;A、B、C为系统的矩阵参数。
状态反馈控制的目标是设计一个状态反馈矩阵K,使得控制输入u(k)与系统状态x(k)之间存在一定的线性关系。
即u(k) = -Kx(k)通过选择适当的状态反馈矩阵K,可以实现系统的稳定性、性能和鲁棒性等要求。
二、设计方法状态反馈控制的设计方法通常可以分为全状态反馈和部分状态反馈两种情况。
1. 全状态反馈全状态反馈指的是利用系统的全部状态信息进行控制。
在这种情况下,状态反馈矩阵K的每一个元素都与系统的状态变量相关。
全状态反馈可以实现系统的最优控制,但需要测量系统的全部状态变量,因此在实际应用中可能会受到限制。
2. 部分状态反馈部分状态反馈是指只利用系统的部分状态信息进行控制。
在这种情况下,状态反馈矩阵K的某些元素与系统的状态变量相关,而其他元素设为零。
部分状态反馈可以在减少测量需求的同时实现系统的稳定和性能优化。
状态反馈控制的设计方法通常采用基于稳定极点配置和线性二次型优化的思想。
具体的设计步骤包括:确定系统的状态空间模型,分析系统的稳定性和性能要求,选择适当的稳定极点位置,根据稳定极点位置计算状态反馈矩阵K,验证系统的性能和稳定性。
三、应用场景离散控制系统中的状态反馈控制在工业自动化、机器人控制、飞行器控制等领域有广泛的应用。
1. 工业自动化在工业自动化系统中,状态反馈控制可以实现对生产过程的精确控制。
例如,在温度控制系统中,通过测量系统的温度状态并进行反馈调节,可以实现对温度的精确控制,提高生产过程的稳定性和可靠性。
状态反馈设计与实现
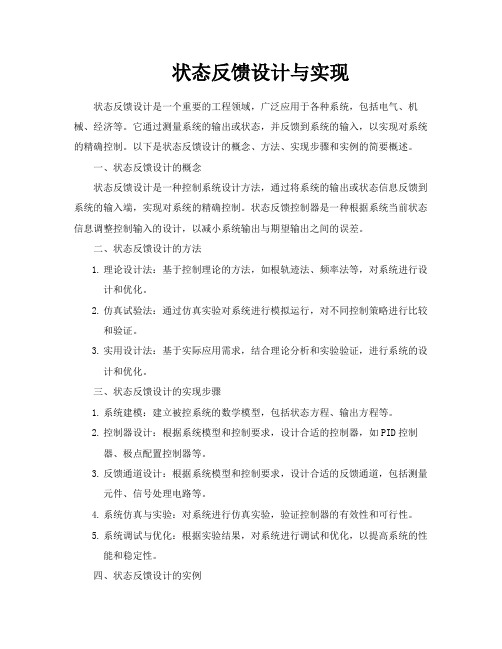
状态反馈设计与实现状态反馈设计是一个重要的工程领域,广泛应用于各种系统,包括电气、机械、经济等。
它通过测量系统的输出或状态,并反馈到系统的输入,以实现对系统的精确控制。
以下是状态反馈设计的概念、方法、实现步骤和实例的简要概述。
一、状态反馈设计的概念状态反馈设计是一种控制系统设计方法,通过将系统的输出或状态信息反馈到系统的输入端,实现对系统的精确控制。
状态反馈控制器是一种根据系统当前状态信息调整控制输入的设计,以减小系统输出与期望输出之间的误差。
二、状态反馈设计的方法1.理论设计法:基于控制理论的方法,如根轨迹法、频率法等,对系统进行设计和优化。
2.仿真试验法:通过仿真实验对系统进行模拟运行,对不同控制策略进行比较和验证。
3.实用设计法:基于实际应用需求,结合理论分析和实验验证,进行系统的设计和优化。
三、状态反馈设计的实现步骤1.系统建模:建立被控系统的数学模型,包括状态方程、输出方程等。
2.控制器设计:根据系统模型和控制要求,设计合适的控制器,如PID控制器、极点配置控制器等。
3.反馈通道设计:根据系统模型和控制要求,设计合适的反馈通道,包括测量元件、信号处理电路等。
4.系统仿真与实验:对系统进行仿真实验,验证控制器的有效性和可行性。
5.系统调试与优化:根据实验结果,对系统进行调试和优化,以提高系统的性能和稳定性。
四、状态反馈设计的实例1.直流电机控制:通过测量电机的转速和电流,实现电机的精确控制。
2.温度控制:通过测量环境的温度,实现温度的精确控制。
3.机器人控制:通过测量机器人的位置和速度,实现机器人的精确控制。
五、总结状态反馈设计是一种广泛应用于各种工程领域的控制系统设计方法。
它通过测量系统的输出或状态信息,并反馈到系统的输入端,以实现对系统的精确控制。
在实际应用中,需要根据不同的系统模型和控制要求,选择合适的控制器和反馈通道,并进行仿真实验和调试优化。
同时,需要注意系统的稳定性和鲁棒性,以确保系统的性能和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制工程学院课程实验报告:
现代控制理论课程实验报告
实验题目:状态反馈控制系统的设计与实现
班级自动化(工控)姓名曾晓波学号2009021178 日期2013-1-6
一、实验目的及内容
实验目的:
(1 )掌握极点配置定理及状态反馈控制系统的设计方法;
(2 )比较输出反馈与状态反馈的优缺点;
(3 )训练Matlab程序设计能力。
实验内容:
(1 )针对一个二阶系统,分别设计输出反馈和状态反馈控制器;(2 )分别测出两种情况下系统的阶跃响应;
(3 )对实验结果进行对比分析。
二、实验设备
装有MATLAB的PC机一台
三、实验原理
一个控制系统的性能是否满足要求,要通过解的特征来评价,也就是说当传递函数是有理函数时,它的全部信息几乎都集中表现为它的极点、零点及传递函数。
因此若被控系统完全能控,则可以通过状态反馈任意配置极点,使被控系统达到期望的时域性能指标。
闭环系统性能与闭环极点(特征值)密切相关,在状态空间的分析和综合中,除了利用输出反馈以外,主要利用状态反馈来配置极点,它能提供更多的校正信息。
(一) 利用状态反馈任意配置闭环极点的充要条件是:受控系统可控。
设SIMO (Single Input-Multi Output )受控系统的动态方程为
状态向量x 通过状态反馈矩阵k ,负反馈至系统参考输入v ,于是有
这样便构成了状态反馈系统,其结构图如图1-1所示
图1-1 SIMO 状态反馈系统结构图
状态反馈系统动态方程为
闭环系统特征多项式为
()()f I A bk λλ=-+ (1-2) 设闭环系统的期望极点为1λ,2λ,…,n λ,则系统的期望特征多项式x b v u 1s C A k
-y x &
为
)())(()(21*n f λλλλλλλ---=Λ (1-3) 欲使闭环系统的极点取期望值,只需令式(1-2)和式(1-3)相等,即
)()(*
λλf f = (1-4) 利用式(1-4)左右两边对应λ的同次项系数相等,可以求出状态反馈矩阵 []n k k k Λ21=k
(二) 对线性定常连续系统∑(A ,B ,C ),若取系统的输出变量来构成反馈,则所得到的闭环控制系统称为输出反馈控制系统。
输出反馈控制系统的结构图如图所示。
开环系统状态空间模型和输出反馈律分别为
H 为r *m 维的实矩阵,称为输出反馈矩阵。
则可得如下输出反馈闭环控制系统的状态空间模型: 输出反馈闭环系统可简记为H(A-BHC,B,C),其传递函数阵为:
GH(s)=C(sI-A+BHC)-1B
B ⎰A
C H
y - x u v
+ + + x ' 开环系统 A B C H '=+⎧⎨=⎩=-+x x u y x
u y v ()A BHC B C '=-+⎧⎨=⎩
x x v y x
四、实验步骤
实验通过MATLAB软件实现。
1.双击MATLAB图标或单击开始菜单,依次指向“程序”、“MATLAB”,单击MATLAB,进入MATLAB命令窗口。
单击MATLAB工具条上的Simulink图标,运行后出现Simulink模块库浏览器,并单击其工具条左边的图标,弹出新建模型窗口。
2.在模块库浏览器窗口中的Simulink下的输入源模块(Sources)、数学运算模块(Math)、连续系统模块(Continuous)、接收模块(Sinks)库中,分别选择阶跃信号(Step)、求和(Sum)、常量增益(Gain)、积分环节(Integrator)、示波器(Scope)模块,建立如图1-2 所示的实验被控系统为Ⅰ型二阶闭环系统结构图。
图1-2 MATLAB系统结构图
3.用鼠标左键双击阶跃信号和各比例环节的模型,设置好参数;选择Simulation菜单中parameters选项,设置好仿真参数;选择Simulation菜单中的start选项,开始仿真;观察并记录下系统的输出。
4.通过状态反馈,将控制系统的闭环极点设置为p1=-1+j、p2=-1-j,重复3步骤。
此时K =[-8 -3]
5.通过输出反馈,将控制系统的闭环极点设置为p1=-1+j、
p2=-1-j,重复3步骤。
此时H =[ -0.3000 -0.3000]
6.由得出的结果,画出结构图,仿真出阶跃响应图。
附录
程序:
1)主函数
%%本程序用于求解形如Y(s)/U(s)=num/den闭环传递函数%%
%% 极点配置问题,包括状态反馈阵<K>和输出反馈阵<H> %%
%%如:Y(s)/U(s) = 10/ s^2 + 5s + 20
clc %清屏
num = [10]; %闭环传递函数分子多项式
den = [1 5 20]; %闭环传递函数分母多项式
P=[-1+j -1-j]; %希望配置的闭环极点
[A,B,C,D]=tf2ss(num,den) ; %求状态空间表达式
[str K]=pdctrb(A,B,P) %求状态反馈阵<K>
[str H]=pdobsv(A,C,P) %求输出反馈阵<H>
2)功能函数
%%程序功能:系统可控性判断以及求解状态反馈阵
%%输入量:系数矩阵A
%% 输入矩阵B
%% 配置极点P
%%输出量:可控性判断结果
%% 状态反馈矩阵K
%%-------------------------------------%%
function [str K] = pdctrb(A,B,P) %定义函数pdctrb
S = ctrb(A,B); %求可控性判别矩阵S
R = rank(S); %求可控性判别矩阵S的秩
L = length(A); %求系数矩阵A的维数
if R == L %判断rank(S)是否等于A的维数str = '系统是状态完全可控的!'; %输出可控性判断结果
K =acker(A,B,P); %求状态反馈矩阵K
else
str = '系统是状态不完全可控的!';
end
3)功能函数
%%程序功能:系统可观性判断以及求解输出反馈阵
%%输入量:系数矩阵A
%% 输出矩阵B
%% 配置极点P
%%输出量:可观性判断结果
%% 输出反馈矩阵H
%%-------------------------------------%%
function [str H] = pdobsv(A,C,P) %定义函数pdobsv
V = obsv(A,C); %求可观性判别矩阵V
R = rank(V); %求可观性判别矩阵V的秩
L = size(A,1); %求系数矩阵A的维数
if R == L %判断rank(V)是否等于A的维数str = '系统是状态完全可观的!'; %输出可观性判断结果
K = acker(A',C',P);
H = K'; %求输出反馈矩阵H
else
str = '系统是状态不完全可观的!';
end
五、实验结果
a)Ⅰ型二阶闭环系统结构图:
图1-3 MA TLAB系统结构图
系统阶跃响应图为:
图1-4 MATLAB系统阶跃响应图
b)加入状态反馈后,闭环系统的结构图为:
图1-5 加入状态反馈闭环系统的结构图加入状态反馈后,闭环系统的阶跃响应图为
图1-6 加入状态反馈闭环系统的阶跃响应图
c)加入输出反馈后,闭环系统的结构图为:
图1-7 加入输出反馈闭环系统的结构图
加入输出反馈后,闭环系统的阶跃响应图为
图1-8 加入输出反馈闭环系统的阶跃响应图
六、结果分析
利用状态反馈或输出反馈使闭环系统的极点位于所希望的极点位置。
用状态反馈实现闭环极点配置的充要条件是被控系统可控。
状态反馈不改变系统的零点,只改变系统极点。
引入状态反馈后,系统可控性不变,但可观测性不能保证。
用输出反馈实现闭环极点配置的充要条件是被控系统可观测。
输出反馈不改变系统的零点。
引入输出反馈后,系统可观测性不变,但可控性不能保证。
1.静态反馈不增加系统动态特性。
2.状态和输出反馈均可保持闭环系统的能控性。
3.输出反馈保持闭环系统的能观性,但状态反馈不能。
4.利用系统的信息多,所能达到的性能好。
状态反馈和输出反馈是控制系统设计中两种主要的反馈策略,其意
义分别为将观测到的状态和输出取作反馈量以构成反馈律,实现对系统的闭环控制,以达到期望的对系统的性能指标要求。
由于由状态变量所得到的关于系统动静态的信息比输出量提供的信息更丰富、更全面。
因此,若用状态来构成反馈控制律,与用输出反馈构成的反馈控制律相比,则设计反馈律有更大的可选择的范围,而闭环系统能达到更佳的性能。
另一方面,从状态空间模型输出方程可以看出,输出反馈可视为状态反馈的一个特例。
输出反馈只能相当于一部分状态反馈。
因此,在不增加补偿器的条件下,输出反馈的效果显然不如状态反馈系统好。
但输出反馈在技术实现上的方便性则是其突出优点
因此,采用状态反馈应能达到更高的性能指标。
七、教师评语。