水下潜器
水下潜器水动力模型简化及参数辨识研究的开题报告
水下潜器水动力模型简化及参数辨识研究的开题报告一、研究背景水下潜器在海洋石油勘探、海洋环境监测等方面都有广泛的应用,因此对水下潜器水动力模型进行研究十分必要。
水下潜器水动力模型是指通过建立数学模型,模拟水下潜器在水中的运动状态、水力性能等因素对水下潜器的影响,并对其做出预测和分析。
通过对水下潜器水动力模型的研究,可以有效提高水下潜器的潜水深度、提升作业效率和水下潜器的稳定性等方面的性能。
二、研究内容本文的研究内容主要包括以下三个方面:1.水下潜器水动力模型的简化:基于水下潜器水动力学理论,通过建立水下潜器水动力模型的基本分析框架,对现有的水下潜器水动力模型进行简化。
通过将模型进行简化并优化,尽可能的减少模型的复杂度,以提高模型的计算效率。
2.参数辨识的研究:对简化后的水下潜器水动力模型,通过实验测试和计算分析等手段,对水下潜器水动力模型中的各项参数进行辨识。
通过对参数辨识的研究,可以更加准确的确定水下潜器水动力模型的各项参数,提高模型的可信度和预测精度。
3.模型应用案例分析:将简化后的水下潜器水动力模型应用到真实的水下潜器中,通过数值仿真和实验验证等手段,对模型的实际应用效果进行分析和验证。
通过应用案例分析,可以更好地了解水下潜器水动力模型的实际应用效果,并针对性地对模型进行优化。
三、研究意义通过对水下潜器水动力模型的研究,可以为水下潜器在海洋勘探、环境监测等领域的应用提供有力的支持。
本文所提出的简化和参数辨识方法,能够提高水下潜器水动力模型的精度和可靠性,为水下潜器的实际应用提供更加准确的支持。
同时,研究成果还将为水下潜器水动力学理论的发展提供有力的理论支撑。
水下潜器的设计和制造技术研究
水下潜器的设计和制造技术研究水下潜器是一种能够实现水下科考、水下探测、水下勘探等活动的重要设备。
水下潜器的设计和制造技术是保证潜器安全、有效工作的重要保障,并对水下科学研究、利用海洋资源等领域起到重要作用。
本文将从潜器的种类、设计和制造技术等方面进行研究和探讨。
一、水下潜器的种类水下潜器的种类很多,根据其利用的能源和所处的位置可以分为两大类:自主式和被动式。
自主式水下潜器是通过内部的电池等电力装置获取能量来移动的,可以根据不同的任务需求进行设计;被动式水下潜器是利用外界环境的压力和流动力量进行控制和移动的,这种水下潜器运行周期长,且少有发生故障的情况。
依据水下潜器的使用范围,可以分为深海、中海和近海潜器。
深海潜器作用于深渊海底,可以用于海底地形、生物、矿产等的研究,深海潜器的最大作业深度超过6000米;中海潜器是作用于海底水域的,其最大作业深度在3000米左右,用于海洋资源、海洋环境和海洋地质地貌等的调查和监测;近海潜器常见于海岸水域及内海等浅海水域,其作用区域一般在200米以内,常用于近岸地质勘探、工程建设和环境调查等。
二、水下潜器的设计和制造水下潜器的设计和制造技术需要综合考虑机械、电子、控制、材料等多项技术的应用。
其主要技术包括潜器结构设计、控制系统设计、各类传感器设计、电子元器件的选择与应用、材料耐海洋环境的要求等。
(一)潜器结构设计潜器结构设计是水下潜器制造的核心部分,其要求设计合理、操作便捷、避免漏水。
潜器结构包括外壳、结构件、气密隔离设备、水密隔离设备、连接装置、附加装置等多个组成部分。
对于深海潜器,其压力极大,设计要考虑到钢壳的厚度和强度;对于中海和近海潜器,一般采用铝合金、钛合金等材料进行制造。
(二)控制系统设计控制系统是水下潜器设计中的重点之一,主要包括自主导航、深度调整、航向调整、控制执行机构和传感器等配套设备。
自主式水下潜器的控制系统需要根据潜器的任务要求进行设计,通常包括水下光纤通讯系统、多维陀螺仪、无线电调制解析系统等。
潜水器的原理

潜水器的原理潜水器是一种专门设计用于在水下进行操作和探索的设备。
它可以被用于科学研究、勘探、水下修复和拍摄等多个领域。
其原理是基于物理学和工程学的知识,在水下对潜水器的设计和操作进行了深入研究,以达到在水下进行各种活动的目的。
潜水器的原理涉及到其基本结构和运行机制。
其主要结构包括船体、动力系统、控制设备和操纵系统。
船体是潜水器的主体结构,能够承受水压和保护内部设备。
动力系统一般采用螺旋桨或喷气等方式,以提供潜水器的推进力。
控制设备由传感器、计算机和仪表等组成,用于监测和控制潜水器的各种运动参数。
操纵系统则是潜水员或遥控器可以使用的设备,使其能够对潜水器进行手动控制。
潜水器的原理还涉及到其运行机制。
潜水器在水下运行时,需要克服水的阻力和压力,并保持相对稳定的运动。
在水下运行时,潜水器需要考虑一系列因素,如水温、水压、水流速度等,以确保潜水器能够安全地进行操作。
因此,潜水器的设计和运行机制需要考虑这些因素,并根据实际情况进行相应的调整。
潜水器的推进原理是其运行机制的重要组成部分。
潜水器在水下推进的方式有多种,主要包括涡轮推进、喷气推进和螺旋桨推进等。
涡轮推进是通过水流的旋转来产生推进力,喷气推进则是通过喷射高压气体来产生推进力,而螺旋桨推进则是通过螺旋桨的旋转来产生推进力。
这些推进方式各有特点,可以根据潜水器的设计和使用需求进行选择。
潜水器的操纵原理也是其运行机制的重要组成部分。
潜水器的操纵方式包括手动操纵和自动操纵两种。
手动操纵是指潜水员通过操纵设备来控制潜水器的运动,而自动操纵则是指潜水器可以根据预先设定的程序来进行运动。
这些操纵方式都需要考虑潜水器的稳定性和灵活性,以确保潜水器在水下进行操作时能够保持良好的运动状态。
潜水器的控制原理是其运行机制的核心。
潜水器的控制系统包括传感器、计算机和执行器等部件,用于监测和调节潜水器的运动参数。
传感器可以实时监测潜水器的位置、姿态、速度等参数,计算机则负责处理传感器采集到的数据,并根据预设的程序进行控制,执行器则根据计算机的指令来调节潜水器的运动状态。
水下潜器研发生产方案(一)

水下潜器研发生产方案一、实施背景中国拥有漫长的海岸线和丰富的海洋资源,随着国家对海洋战略的重视,开发利用海洋资源已成为经济发展的重要方向。
水下潜器技术作为海洋资源开发的核心技术,对于我国来说具有极其重要的战略意义。
目前,我国的水下潜器技术主要依赖进口,自主研发能力较弱,产业结构不够完善。
因此,从产业结构改革的角度出发,开展水下潜器研发生产工作势在必行。
二、工作原理水下潜器是一种能够在水下运行的设备,根据不同的应用需求,可以分为深海型、浅海型等不同类型。
其工作原理主要是利用流体力学、材料科学、电子科学等多学科知识,通过动力系统驱动,实现水下航行。
具体来说,水下潜器主要由外壳、动力系统、控制系统、探测系统等组成。
1.外壳:一般由高强度材料制成,如钛合金、高强度钢等,用于保护潜器的内部设备和人员。
2.动力系统:主要包括电池和推进器,为潜器的航行提供动力。
3.控制系统:包括导航系统、控制系统等,用于控制潜器的航行方向、深度等。
4.探测系统:包括各种传感器、摄像头等设备,用于探测水下的地形、生物等信息。
三、实施计划步骤1.研发准备阶段:进行市场调研,分析需求,确定研发方向和目标。
同时,组织科研团队,进行技术准备和资源整合。
2.设计阶段:根据市场需求和技术准备情况,进行方案设计,包括外壳设计、动力系统设计、控制系统设计、探测系统设计等。
3.试制阶段:在完成设计后,进行试制,对各个系统进行测试和验证,确保其功能和性能符合设计要求。
4.测试阶段:在试制完成后,进行水池试验和海上试验,对潜器的航行性能、稳定性等进行全面测试。
5.产业化阶段:在试验成功后,进行产业化准备,包括生产线建设、批量生产等。
同时,加强与相关企业的合作,推动产业链的完善。
四、适用范围水下潜器技术广泛应用于海洋资源开发、海洋科学研究、海洋防务等领域。
具体来说,包括但不限于以下方面:1.海洋资源开发:用于海底矿产资源的勘探和开采,提高资源开发效率。
水下潜器结构的ansys分析
水下潜器结构的ansys分析问题描述:海洋是一个神秘的世界,是人类一直以来不断尝试探索其所有的奥秘的地方。
在探索海洋,特别是深海时,水下潜器是必不可少的工具。
在深海里,一般的密封容器很容易被压瘪。
只有特殊结构的密封体才能承受如此巨大的压力。
所以耐压性是水下潜器的一个重要参数。
除了材料外,潜器的结构对其的影响也十分大。
不同的结构可以导致不同的失稳条件,在稳定性不够的情况下,可以通过增加壁厚或者是增加加强筋来达到挺高稳定性的效果。
考虑到重量对于水下装置十分重要,所以一般是通过增加加强筋来实现的。
加强筋是为了增加刚度、减少形变的,但是壳体内表面的加强筋和外表面的加强筋所达到的效果是不一样的。
本文将对一种环肋状潜器结构进行ansys有限元分析,对其两种不同加强筋方式(内表面加强筋、外表面加强筋)分别在内压和外压下进行变形、应力和应变的对比,并将其与一般密封容器进行比较分析。
一、建立有限元模型Ansysy是一款比较强大的仿真软件,简单的模型可以直接在ansys里建立。
此次一共需要建立3个模型,外加强筋、内加强筋和普通的无加强筋模型。
三种模型都是采用了相同的厚壁空心圆柱体,为了不加入其他的影响因素,内外加强筋的尺寸都是一样的。
唯一的的区别就是一个加强筋一个加在内表面,一个加在外表面。
3个模型使用的材料都是结构钢,其弹性模量是2e5MPa,泊松比为0.3,密度为7.85e-6kg/mm3。
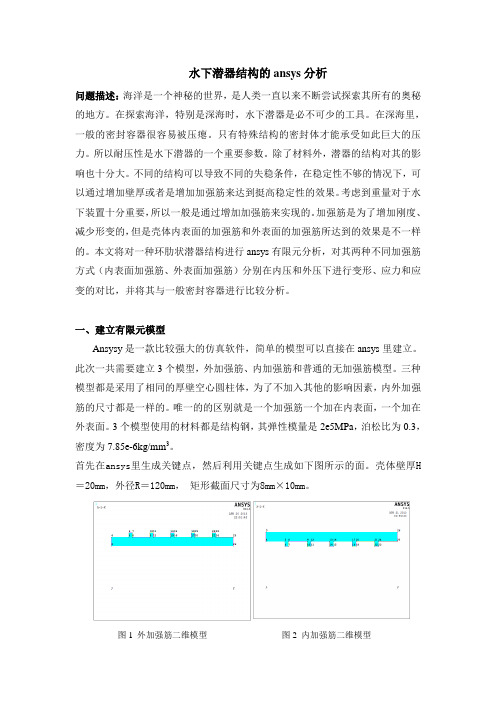
首先在ansys里生成关键点,然后利用关键点生成如下图所示的面。
壳体壁厚H =20mm,外径R=120mm,矩形截面尺寸为8mm×10mm。
图1 外加强筋二维模型图2 内加强筋二维模型二维模型建立好了之后利用旋转将面绕轴线旋转360度得到三维体,然后利用布尔运算将旋转的三维体相加得到最终的三维模型。
如下图所示。
图3 外加强筋三维模型图4 内加强筋三维模型三维有限元模型建立好了之后,选择添加单元体Solid 185,。
深海潜水器的结构设计及工作原理演算
深海潜水器的结构设计及工作原理演算深海潜水器是一种专门设计用于深海探测和研究的设备,它能够承受深海极端的水压,并能携带科研装备进行观测和样品采集。
深海潜水器的结构设计和工作原理对其性能和操作安全至关重要。
一、深海潜水器的结构设计1. 强化外壳深海潜水器的外壳必须能够承受极高的水压,以保护内部的仪器设备和乘员安全。
一般来说,外壳采用高强度耐压材料,如钢铁合金或者高强度复合材料。
外壳的结构必须具备足够的强度和刚度,以防止在深海环境下由于水压巨大而发生变形或破裂。
2. 压力补偿系统深海潜水器在下潜过程中,水压会随着深度的增加不断增加。
为了保证舱内的环境安全和相对稳定的水压,潜水器需要配备压力补偿系统。
该系统通过向舱内注入适当的气体,使舱内气压与外界水压保持平衡。
这样一方面可以减小潜水器外壳的应力,另一方面可以保证潜水器内部的设备和乘员能够正常工作。
3. 推进系统深海潜水器需要具备自主推进的能力,以便在深海中进行巡航和定点悬浮等操作。
通常,推进系统包括多个水推进器和控制系统。
水推进器通过向后喷射水流产生推力,从而推动潜水器前进或者保持在定点悬浮状态。
控制系统则负责控制水推进器的运行和动力调节,以实现潜水器的精确控制。
4. 深海采样和观测设备深海潜水器的主要任务之一是进行深海生物、地质和海洋环境的采样和观测。
因此,潜水器上需要配备适当的采样器和观测设备。
采样器可以用于采集深海生物样本、沉积物和水样等,而观测设备可以用于测量水温、水压、水质、地质地形等参数。
这些设备需要与潜水系统相连,以确保科学家能够获得准确的数据和样本。
二、深海潜水器的工作原理演算1. 下潜过程深海潜水器通常通过浮力控制下潜过程。
在开始下潜前,潜水器可以通过在舱内注入适量的球astatine气体或通过水泵泵入某些部分,减小潜水器的总体密度,使其比水重,从而产生向下的浮力。
潜水器会逐渐下沉,直至与水平再平衡。
2. 压力平衡当深海潜水器下潜到一定深度时,外界的水压将逐渐增大,此时需要通过压力补偿系统来平衡舱内和外界的压力。
潜水器的工作原理与应用
潜水器的工作原理与应用潜水器是一种专门用于在水下工作的设备,包括潜艇、潜水器、水下机器人等,它们的工作原理和应用也有很大的不同。
一、潜水器的工作原理潜水器的工作原理基本上是通过控制浮力使其下沉或上浮,并通过推进器控制方向。
通常采用水下蓄电池或其他能源作为动力源。
潜艇是一种能够在大洋深处进行长期航行的水下车辆,它通过控制船体内的水的浓度来控制浮力和下沉。
船体内充满了海水和空气混合物,通过调节水的浓度来改变船体的浮力。
下潜时,通过抽出水分来增加船体的密度,而上浮时则通过压缩空气来减少船体的密度。
潜水器是一种在水下进行逐步探索和工作的设备。
它利用电池或外部电源推动螺旋桨或喷射器,通过控制螺旋桨或喷射器的旋转方向和速度,来控制潜水器的方向和速度。
二、潜水器的应用潜水器的应用非常广泛,例如科学研究、水下勘探、军事应用、水下建设、水下摄影、水下拍摄等。
在科学研究方面,潜水器可以帮助研究海底生物学、蛋白质结构、海洋环境变化等问题。
许多科学家利用潜水器进行调查和观察,以深入了解海洋和地球。
在水下勘探方面,潜水器不仅可以获取高清晰度的图像,而且可以进行实时监控。
这对于海底地形的调查、沉船发现和地震监测都具有重要的意义。
在军事应用方面,潜艇是一种可以靠近目标并避免被对方察觉的有效武器。
这种水下战斗船只可以携带弹药和隐蔽设备,以进行对其他船只或海上设施的攻击。
在水下建设方面,潜水器可以帮助进行海底机场、海底隧道和海底电力网等的建设。
潜水器的灵活性对于完成这些任务有很大的帮助。
在水下摄影与拍摄方面,潜水器可以帮助人们记录海洋生物、海底地形和水下人类活动等。
影片《泰坦尼克号》中使用的水下摄影器材包括潜水器和遥控式自由悬吊侦测器。
综上所述,潜水器在现代社会中具有非常重要的角色。
其应用能够让我们更好地了解海洋和地球,还可以帮助我们解决各种各样的问题。
随着科学技术的不断提高和更新换代,潜水器的设计和结构也会不断优化。
预计未来潜水器将更为灵活、智能化,能够在更严峻的环境下工作。
潜水器的原理
潜水器的原理
潜水器是一种能够在水下进行作业或者探测的设备,它的原理是通过控制浮力和推进力来实现在水下的移动和停留。
潜水器通常被用于水下勘探、海底工程、水下考古等领域,是现代海洋科学和工程技术的重要工具。
首先,潜水器的浮力控制是实现在水下移动和停留的关键。
潜水器通过调节内部的浮力装置,可以在水下保持不同的浮力状态,从而实现上浮、下沉或者悬停在水中。
浮力控制的原理是根据阿基米德原理,通过改变潜水器的体积或密度,来调节其在水中受到的浮力,从而实现在水下的移动和悬停。
其次,潜水器的推进力来源于动力装置,通常是电动机或者涡轮引擎。
这些动力装置通过推进器将动力转化为推进力,从而驱动潜水器在水中前进或者转向。
推进力的大小和方向可以通过操纵潜水器的控制系统来实现精确的控制,从而满足不同水下作业的需求。
除了浮力和推进力,潜水器还需要配备传感器和控制系统,以实现对水下环境的监测和操控。
传感器可以监测水下的水质、温度、压力等参数,同时也可以用于探测水下的目标物体或者地形。
控制系统则可以根据传感器的反馈信息,对潜水器的浮力和推进力进行实时调节,从而保证潜水器在水下的稳定和安全运行。
总的来说,潜水器的原理是基于浮力控制和推进力驱动,通过配备传感器和控制系统,实现在水下的移动、停留和作业。
潜水器的应用范围非常广泛,不仅可以用于科学研究和工程勘测,还可以用于水下救援和海洋资源开发等领域。
随着科技的不断发展,潜水器的原理和技术也在不断创新和完善,为人类探索水下世界提供了强大的工具和支持。
潜水器的原理范文
潜水器的原理范文潜水器是一种能够下潜至海底或水下深处进行科学探测或工程作业的装置。
它可以容纳人员或仪器设备,提供稳定的水下工作环境,并依靠特定的原理来完成下潜、上浮、定位、操作等功能。
首先是浮力原理。
根据阿基米德原理,被浸入液体中的物体所受到的浮力等于排挤液体的重量。
潜水器通常采用钢制结构,其密度比水要大,因此其体积的一部分会浸入水中并产生浮力。
通过控制浮力的大小,潜水器可以实现下潜或上浮。
为了增加潜水器的稳定性,可以在潜水器上设置平衡重物。
其次是压力平衡原理。
在水下深处,水压会随着深度的增加而增加,这会给潜水器和潜水员带来极大的压力。
为了保证潜水舱内的安全,潜水器需要使用压力舱,将舱内的气体压力与外部水压平衡。
这样可以避免舱内产生过大的压差,保护人体和设备的安全。
稳定性原理也是潜水器设计的重要原则。
潜水器需要具备足够的稳定性,以便在水下进行探测或操作。
这主要通过两种方法来实现:一种是调整潜水器的重心,使其处于稳定状态;另一种是增加尾翼或舵面等稳定装置,通过调整这些装置的位置和角度来保持潜水器的稳定。
除了以上原理以外,潜水器还需要依靠动力系统来进行推进。
潜水器一般配备有电动或燃料动力系统,通过螺旋桨、水流喷射或者其他推进方式来驱动潜水器在水下移动。
动力系统还可以提供一定的操控能力,使潜水器能够根据指令进行定位、转向或停止等动作。
另外,潜水器还需要配备控制系统,用来控制潜水器的下潜、上浮、定位、操作等功能。
控制系统可以由潜水员通过操纵杆、按键或触摸屏等控制装置完成,也可以采用远程操控的方式,由地面或其他船只实时控制潜水器的行动。
总之,潜水器的原理是基于浮力、压力平衡、稳定性和动力推进等原理来实现的。
通过这些原理的相互配合,潜水器可以下潜至水下深处进行科学研究、工程作业等任务。
随着科技的不断进步,潜水器的设计和性能也在不断提高,为人类探索海洋和水下世界提供了更多的可能性。
水下潜器 ---吴学利
按潜水程序的定型程度,潜水方法的 按潜水程序的定型程度, 成熟程度来划分, 成熟程度来划分,高压潜水可分为常 规潜水和饱和潜水两种. 规潜水和饱和潜水两种. 常压潜水又称间接潜水,即人使用保 常压潜水又称间接潜水, 持常压的潜水器具进行潜水. 持常压的潜水器具进行潜水.这种潜 水方式的优点是潜水深度不大, 水方式的优点是潜水深度不大,不需 要专业潜水员,不必担心潜水病, 要专业潜水员,不必担心潜水病,潜 水支持系统相对较少, 水支持系统相对较少,人的工作环境 比较舒适,安全等. 比较舒适,安全等.但是常压潜水器 的技术工艺要求十分高, 的技术工艺要求十分高,如耐压壳要 坚固,水密,安全,可靠, 坚固,水密,安全,可靠,作业机械 要很灵活等,因而作业难度较大. 要很灵活等,因而作业难度较大.就 应用范围看, 应用范围看,常压潜水作业不如高压 潜水作业
无缆潜水器
无人无缆潜水器尚处于研究,试用阶段, 无人无缆潜水器尚处于研究,试用阶段, 还有一些关键技术问题需要解决.今后, 还有一些关键技术问题需要解决.今后, 无人无缆潜水器将向远程化, 无人无缆潜水器将向远程化,智能化发 其活动范围在250~5000公里的半 公里的半, 展,其活动范围在250~5000公里的半, 径内. 径内.这就要求这种无人无缆潜水器有 能保证长时间工作的动力源. 能保证长时间工作的动力源.在控制和 信息处理系统中,采用图像识别, 信息处理系统中,采用图像识别,人工 智能技术,大容量的知识库系统, 智能技术,大容量的知识库系统,以及 提高信息处理能力和精密的导航定位的 随感能力等.如果这些问题都能解决了, 随感能力等.如果这些问题都能解决了, 那么无人无缆潜水器就能是名副其实的 海洋智能机器人. 海洋智能机器人.海洋智能机器人的出 现与广泛使用, 现与广泛使用,为人类进入海洋从事各 种海洋产业活动提供了技术保证. 种海洋产业活动提供了技术保证.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ROV的控制技术 —— ROV的组成
(2)脐带缆管理系统与收放机构:绞车+排缆器+(中继器)
绞车
自动排缆器
ROV的控制技术
(2)脐带缆管理系统与收放机构:绞车+排缆器+(中继器)
水平运动推力器推力:
HT
X Y
N
HT1 HT2 HT3 HT4
1 1 0 0
KH
0
0
1
1
r1 r1 r3 r4
B
HT
uu12HHTT
uu34HHTT
Tj 1
d j
dp
T
d j
j dp
Fj, f
m
dvt dt
d j
dp
T
j
d j
dp
Tj1
d j
dp
Wj,water
m
dvt dt
d j
dp
F j , water
1 2
d
Cw
w
A
v j,rel
v j,rel
脐带缆在水中的微元
ROV的控制技术 —— 受力与建模
I yq (I x I z )rp m zG u wq vr xG w pv uq M I z r (I y I z ) pq m xG v ur pw yG u qw vr N
主控电脑 手动控制手柄 监视器/控制界面
(2)脐带缆管理系统与收放机构
绞车 排缆器 (中继器)
(3)遥控潜水器载体(ROV)系统
传感器系统 浮力调整系统 推进系统 机架/水密舱
(4)水面供电系统 电源转换和滤波 变压器 电压\电流监测
(5)附件系统 水下作业手 作业工具包
m (v wp ur) yG (r2 p2 ) zG (qr p ) xG (qp r) Y m (w uq vp) zG ( p2 q2 ) xG (rp q) yG (rq p ) Z
Ix p (Iz I y )qr m yG (w pv qu) zG (v ru pw) K
推力器模型
ROV的控制技术 —— 运动与推进
螺旋桨敞水试验
推力值(千克力)
6 5 4 3 2 1 0
0 -1
250 正车推力曲线
1
2
3
4
5
6
推力器电压(V)
190-229 190-232 190-230 190-231 190-304 190-228
ROV的控制技术 —— 运动与推进
螺旋桨敞水试验
脐带缆
ROV的控制技术 —— 受力与建模
脐带缆和ROV可以看成刚柔混合的多体系统,由于本身比较硬, 所以在风浪流的条件下,尤其对中小型ROV的运动影响较大 。
ROV的控制技术 —— 受力与建模
1、脐带缆的影响
s
T
F a
W m wA g
W
F
T s
ma
ROV的控制技术 —— 受力与建模
推力值(千克力)
250 倒车推力曲线
0.2
0
0
1
2
3
4
5
6
-0.2
-0.4
-0.6
-0.8
-1
-1.2
-1.4
-1.6
-1.8
推力器电压(V)
190-229 190-232 190-230 190-231 190-304 190-228
ROV的控制技术 —— 运动与推进
推力器推力分配模型
推力器的位置矢量和方向:
Ti 1 T i
d i
ds
di
ds
T
i
d i
ds
Ti1
di
ds
Fi,wind
m
dvit dt
d i
ds
Wi,air
m
dvit dt
di
ds
Fi
, wind
1 2
d
i
C A wind air t
vi,wind
vi,wind
a
脐带缆在空气中的微元
0
ROV的控制技术 —— 受力与建模
于是有:
脐带缆和ROV之间的坐标变换: xt yt zt xr yr zr H T , , B , ROV坐标系下脐带缆的作用力和力矩:
Qt
rt
TR
rtyVR rtz FRy rtz FRx rtxVR
1、ROV的定义及特点
工作在未知、复杂或危险的水下环境; 一般通过脐带或系缆由母船向潜水器传输动力、命令
和控制信号;潜水器的姿态及传感器数据也通过脐带
或系缆传回母船; 在ROV执行水下作业时操作员可以工作在相对舒适的环
境之下。
ROV的控制技术 —— ROV的组成
2、ROV系统组成
(1)水面控制台
中继器 中继器上一般装有监控,将结果上传到水面控制台, 对收放情况进行全面地监控。
ROV的控制技术 —— ROV的组成
(3)ROV载体:包含浮力调整系统,推进系统,传感器系统, 机架和水密耐压舱几个部分
浮力材
推力器
视觉感知系统
耐压控制舱
ROV的控制技术 —— ROV的组成
水下作业和搭载设备的需要大多采用开架式结构
ROV的控制技术 —— ROV的组成
(5)附件系统:水下机械手(工具撬)
ROV的控制技术 —— 运动与推进
ROV的运动和推力分配:
ROV在水中的运动同样遵循六自由度运动学方程 主要完成直航、转艏、下潜 根据需要完成侧移和作业中的垂向姿态调整(横倾、纵倾)
m (u vr wq) xG q2 r2 yG ( pq r) zG ( pr q) X
ROV的控制技术 —— 运动与推进
推力器推力分配模型
水平运动推力器推力:
ROV的控制技术 —— 运动与推进
垂向推力分配方式类似,主要完成ROV 的下潜和垂向姿态调整,通过横倾和纵 倾的控制尽量保证其平稳作业
四个推进器可同时实现下潜和横纵倾姿态调整
ROV的控制技术 —— 受力与建模
四、受力与建模
c c H s c
s
c s s s c s s sin c c
c s
c s c s s
s
s
c
c
s
c c
其在次 x0,, y先0 平令面x上t在,缆z0 的轴切逆线时方针向旋,转yt
角将 x0 旋转至 xt
1、脐带缆的影响
将脐带缆的受力分为水面、水 下和ROV端点三种情况讨论。
①脐带缆在水面的受力方程:
设 d i 为 缆 微 元 的 拉 伸 长 度 ,di 为脐带缆微元距离水面的高度,Fi,wind
代表风对缆的作用力,Cwind 为空 气中的拖曳系数,vwind 为空气相对
缆的速度, 为缆微元速度
Harbin Engineering University
高技术船舶与海洋工程中的控制问题
第六讲
缆控水下机器人(ROV)的控制技术
主讲人 刘志林
1
ROV的控制技术 主要内容
一、ROV概述 二、ROV的组成 三、运动与推进 四、受力与建模
五、控制系统设计
六、难点和问题
2
ROV的控制技术
水下机器人定义:是一种能在水中浮游或在海底 行走、具有观察能力和使用机械手或其他工具进 行水下作业的装置。 水下机器人具有四个基本特点: (1)可移动性; (2)能够感知机器人的外部和内部环境特性; (3)拥有完成使命所需的执行机构; (4)能自主的或在人的参与下完成作业。
3kg 75m
11kg 150m
23kg 300m
800kg 1000m
2400kg 3000m
ROV的控制技术 —— ROV的组成
(4)水面供电系统:电源转换和滤波+变压器+电压\电流监测
水面供电系统负责将外部电源转换 为ROV的收放,水面控制台,水下 载体的动力用电所需的电源,并通 过滤波等手段减少纹波,为载体控 制提供稳定的控制用电。
1、脐带缆的影响
③此外还要考虑脐带缆两端的受力:
i.水面绞盘端点 O0
T0
H
2 0x
H
2 0y
V02
脐带缆在水中的微元
其中 H0x ,H0 y ,V0 为缆在收放时受
到的反作用力,例如绞盘的转动惯
量力矩,滑动摩擦,缆的弹变张力
等。
ROV的控制技术 —— 受力与建模
1、脐带缆的影响
③此外还要考虑脐带缆两端的受力:
ROV的控制技术 —— ROV概述
1、水下机器人的分类
水下机器人
载人 载人无人两用
缆控(ROV)
无人(UUV) 有缆无缆两用
浮游式 拖曳式 爬行式 附着式
预编程型
无缆(AUV) 智能型
监控型
ROV的控制技术 —— ROV概述
2、ROV的产生与发展
ROV的控制技术 —— ROV概述
2、ROV的产生与发展——我国情况
u HT
水平面3个自由度