基于飞思卡尔单片机自动循迹小车控制的设计
基于飞思卡尔微控制器的智能循迹小车的设计
[ 作者简介 ]寸晓非 (9 8一) 男 , 17 , 云南丽江人 , 荆楚理工学院讲师 , 硕士。研究 方向 : 测控技 术 。
1 8
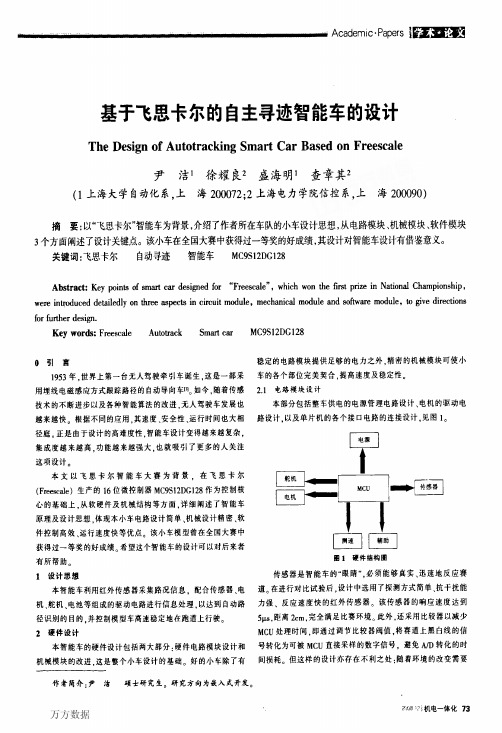
图 1 硬 件 结 构 框 图
分布如 图2所示。在图 2 所示的传感阵列中 , 一个发射管对应二个接收管 , 这样相 比一对一的发射 一 接 收可 以节 省近一 半 的发射 功率 。光 敏 晶体 管 的输 出 电压 作 为 S2 1X微 控 制器 的模 拟输入 , 传 感信 号 7组
中的黑色轨迹 , 并通过微控制器对传感数据进行分析和融合 , 实时调整小车 的运动状态 , 实现一定条件 下的 自主行驶 。小车的导航系统同时具备 以下的能力 : 1 传感系统能够准确识别轨迹信息 ; ) 2 控制 算法足 够精 确 , 制 系统对 于 检测结 果 能够做 到实 时响应 ; ) 控
【 关键词 ] 智能 小车 ; 迹 ;1X微控制器 ; 循 S2 红外传感 器阵列 ;I PD控 制
[ 中图分类号 ] T 2 2 6 [ P4 . 文献标识 码] A [ 文章编号] 10 4 5 (0 2 0 0 1 0 0 8— 6 7 2 1 )4— 0 8— 5
0 前 言
图 2 传 感 器 阵 列 分 布 图
IO—I7分 别对 应连 接到 微控 制器 的 A O~A 7模 拟 通道 上 。 N N N N
12 伺 服 电机 .
智能小车通过伺服电机进行转 向控制 , 电机的运转采用脉宽调制模式 ( WM,u eWihM d l P Pl d oua s t - i )可 fn , 以随时改变行进的角度 。为 了始终保持在正确的轨迹上行驶 , o 电机每 2 s 0m 将会接收一次脉 冲 信号 , 以便调整行进的路线 , 伺服脉冲的宽度决定着伺服电机角度变化 的范围。实时脉宽与小车转向偏 转角 的对应关系如表 1 所示 。
基于飞思卡尔的自主寻迹智能车的设计
其中.FOR循环包含了检测黑线位置.更新舵机输出等。具 体见图3.
本小车对黑白线的检测使用了12个红外管,实行等距排 列。这12个er夕l,管将坐标细分为23个坐标值对赛道黑线位置 进行判断。对于采集的数据.使用循环检测的方法,即从左边的 光电管开始,检测其是否在黑线上:如果在,那么接着检测其右 边的光电管是否亦如此,依次向右推进:当出现3个以上光电 管同时处于黑线上方.则过滤掉当前采样数据.采用历史值。
2.期刊论文 高凤水.靳涛.赵书朵 基于飞思卡尔单片机的智能车设计 -电子设计应用2008(5)
本文设计一种能在跷跷板上根据预定轨迹行驶,并且可以使跷跷板保持平衡的电动车.它以飞思卡尔MC9S12DG128单片机作为控制核心,由驱动调速模 块、路面检测模块、显示模块、电源模块等几部分组成.本设计的平衡杆力矩补偿装置可以使跷跷板的调节平衡精度更高.
对小车方向控制的设计.采用的是模糊控制的思想,并结
FOR循环
④
图2主流程图
厂—1磊1 磊i]
I....................................————.——.................................J
I
检测’前速度
更新电机输出
-
判断是否到终点停车
围3 FOR循环 合了PID控制方法。首先。确定模糊控制器的输人变量和输出 变量,输入量即为黑线坐标,而输出量便是舵机所对应的角度: 第二,编制模糊表,加快对弯道的处理速度;第三,由于小车每 次进人同一个弯道时速度、角度都会不同.所以还需要加入 PID算法进行修正,尤其是D的引入,将本次和上次遇到同个 弯道时传感器采集到的数据进行处理。不断将入弯偏差减小或 者消除.达到平滑入弯的目的。
基于飞思卡尔单片机自动循迹小车控制的设计
摘要随着我国的电子科技的不断发展,我们生活中的自动化设备越来越多,也为嵌入式在智能化上的研究提供了一个广阔的平台。
本系统以MK60DN512VMD100微控制器为核心控制单元,选用OV7620 CMOS 模拟摄像头检测赛道信息,高速AD转换芯片选用TCL5510,将提取后的灰度图像进行软件二值化,进而提取赛道信息;用光电编码器实时检测小车的实时速度,采用PID控制算法调节电机的速度以及舵机转向,从而实现速度和方向的闭环控制。
关键字:MK60DN512VMD100,OV7620 CMOS,软件二值化,PIDAbstractWith the continuous development of electronic technology, more and more automation equipment into the production life of the people, the rapid development of embedded intelligent study provides a broader platform.In this paper, the design of intelligent vehicle system MK60DN512VMD100 microcontroller as the core control unit, the selection of OV7620 CMOSanalog cameras to detect the track information, to using TCL5510 high-speed AD converter chip, software binarization image, extract the white guide line for identification of the track information; optical encoder to detect the real-time speed of the model car, using the PID control algorithm to adjust the speed of the drive motor and steering the angle of the steering gear, in order to achieve closed-loop control of velocity and direction of the model car. Keywords: MK60DN512VMD100,OV7620 CMOS,software binarization, PID目录摘要 (I)Abstract .................................................................................................................................. I I 1前言 (1)1.1 设计的背景以及意义 (1)1.2 智能小车国内外概况 (1)1.2.1国内研究的概况 (1)1.2.2 国外研究概况 (2)1.3智能小车的发展前景 (2)2 飞思卡尔单片机自动循迹小车系统设计总方案 (3)2.1 系统硬件部分 (3)2.2 系统软件部分 (4)3 智能车硬件系统 (5)3.1 单片机最小系统 (5)3.1.1 PIT定时器模块 (6)3.1.2 PWM 模块 (6)3.1.3 I/O模块 (7)3.1.4 时钟电路 (7)3.1.5 复位电路 (7)3.1.6 JTAG接口电路 (8)3.2 电机驱动模块 (8)3.3路径识别摄像头检测模块 (9)3.3.1 摄像头的选择 (9)3.3.2 摄像头简介 (10)3.4 速度检测模块 (10)3.5 舵机模块 (10)3.6电源管理模块 (10)3.6.1 3.3V电源 (11)3.6.2 5V电源 (11)4 软件系统的设计与实现 (12)4.1赛道信息的提取 (12)4.2 PID算法介绍 (12)4.2.1 位置式PID (13)4.2.2 增量式PID (14)4.2.3 PID 参数整定 (14)4.3转向舵机的控制方法 (15)4.3.1 舵机的工作原理 (15)4.3.2 舵机的PID 控制 (15)5 开发平台介绍 (19)5.1 IAR Embedded Workbench IDE简介 (19)5.2 IAR Embedded Workbench的功能及特点 (19)5.3 硬件开发平台Altium Designer (22)6结论 (23)参考文献 (24)致谢 .................................................................................................... 错误!未定义书签。
基于飞思卡尔单片机的智能循线赛车设计和实现

系统 总 体 方 案 设计
本 文设计 的智 能循线 赛车 主要 由路径 检测 、 机转 向控制 、 舵 电机 驱 动 、 车速 控制 等功 能模 块 以及 软件 控 制 算 法构成 。小 车 以 1 6位 MC M 9 1D 18 为核 心控 制器 , U( C S2 G 2 ) 根据 黑色 和 白色反 射率 的不 同 , 用 “ ” 阵 采 一 字 列 的红外 光 电传感器 对 黑线 白底 路 径 进 行识 别 , 检 测 到 的 信 号送 入 MC 通 过 查表 方 式 改 变 控 制舵 机 的 将 U,
图 3 IR 0 T 099电 路 原 理 图
图 4 驱动直流电机的“ 桥 电路 H”
2 4 舵 机转 角控 制模块 .
系 统角度 控 制模块 采用 F t a 司 的 ¥ 00型舵 机 , ua 公 b 31 它为 通 用 舵 机 , 具有 低 成本 、 反应 快 、 扭 矩 的 特 高
E.. ........ . .......... . . . . . .J
二 圃
、 ●
囤
l向 — 二 r——_: — — 机K 转 — —舵 1 ——
图 1 系统 结 构 框 图
2 智能 小 车硬 件设 计
2 1 电源模块 .
电源是 一个 系统 正常工 作 的基础 , 电源的设 计至关 重 要 。系统 模 块 中需 供 电的部 分 包 括 : 电传 感器 模 光
收稿 日期 : 0 0— 3—1 21 0 9 作者简介 : 杨丹 明( 95一) 男 , 士研究生 , 18 , 硕 主要研 究方向为控制理论 与控制工程。
第 6期
杨丹明 , 王富东 , 张
成, : 等 基于飞思卡尔单片机的智能循 线赛 车设计和实现
基于飞思卡尔单片机的智能小车设计

安徽建筑工业学院毕业设计(论文)专业:通信工程班级:08通信2班学生姓名:谢春林学号:课题:基于飞思卡尔单片机的智能小车设计与应用主控制板硬件设计指导教师:夏巍2012 年 6 月1日摘要本文的主要内容是利用飞思卡尔公司的32位单片机Kinetis10,设计能在特定跑道上循迹行驶的智能小车。
智能车系统以Kinetis10为核心,用它来进行信号采集、数据传输与运算等动作,并产生PWM波控制舵机和电机。
整个系统由单片机模块、路径识别模块、速度检测模块、舵机模块、直流电机驱动模块、电源模块等组成。
智能小车的硬件设计包括:双向控制的电机驱动,可同时对多模块供电的电源系统,3.3V PWM波形驱动舵机电路,与上位机通信的RS232通信模块等。
关键字:智能小车,Kinetis10,电源系统,双向控制。
AbstractThe main content of this paper is to use the 32-bit SCM freescale company Kinetis10, in particular the runway design can trace the car driving on intelligence. Intelligent car system to Kinetis10 as the core, and use it to signal acquisition, data transmission and computing such action and create PWM wave to control the steering gear and motor. The whole system of microcomputer module, path recognition module, speed detection module, steering gear module, dc motor driver module, power supply module.Intelligent car of hardware design including: two-way control motor drive, but at the same time for more power supply module of the power supply system, 3.3 V PWM waves of steering gear drive circuit, and the upper machine RS232 communication module of communication, etc.Key word: Intelligent vehicles, Kinetis10, Power system, Two-way control.目录1 绪论 (1)1.1选题意义 (1)1.2 国内外概况 (1)1.2.1国外概况 (1)1.2.2 国内概况 (2)1.3智能车的发展前景 (3)2 系统设计与方案论证 (3)2.1 系统设计要求 (3)2.2 系统设计方案 (3)2.2.1 主控芯片的选定 (4)2.2.2 传感器模块 (4)2.2.3 测速传感器模块 (5)2.2.4 转向舵机模块 (5)2.2.5电机驱动模块 (5)3 主控芯片简介 (6)3.1 Kinetis K10简介 (6)3.2 所用模块简介 (6)3.2.1 PWM 模块 (7)3.2.2 PIT模块 (7)3.2.3 I/O模块 (7)3.2.4 SCI模块 (7)4 智能车机械设计与安装 (7)4.1 舵机的安装 (8)4.2 前轮倾角的调整 (8)4.3 后轮差动轮的调整 (9)4.4 速度检测模块安装 (9)4.5 传感器的安装 (9)5 主板电路设计 (9)5.1 主控芯片电路 (9)5.2 外围电路 (11)5.2.1 电源管理模块 (11)5.2.3 速度检测电路 (15)5.2.4 舵机驱动电路 (16)5.2.5拨码开关电路 (17)5.2.5 RS232通信模块 (17)6 软件设计 (18)6.1 开发工具 (18)6.2 软件流程图 (18)7 总结 (20)8 致谢 (21)参考文献 (22)附录: (23)基于飞思卡尔单片机的智能小车设计————主控制电路设计电子与信息工程学院通信工程 2008级2班谢春林指导教师夏巍1 绪论1.1选题意义智能车辆( intelligent vehicles, IV)是智能交通系统( in2telligent transportation systems, ITS)的重要构成部分,其研究的主要目的在于降低日趋严重的交通事故发生率,提高现有道路交通的效率,在某种程度上缓解能源消耗和环境污染等问题。
基于飞思卡尔单片机的智能小车设计与应用
基于飞思卡尔单片机的智能小车设计与应用毕业设计 (论文)专业通信工程班级10级1班学生姓名刘新学号10205040117课题基于飞思卡尔单片机的智能小车设计与应用---主监控程序和行使操纵程序的设计指导教师夏巍2021年6月1日摘要本文要紧是以全国大学生〝飞思卡尔〞杯智能小车竞赛为背景的一项课题研究。
本次课题研究要紧采纳利用飞思卡尔公司的32位单片机MPC5604MINI作为核心操纵单元,用CCD进行对道路信息的采集,用编码器对小车速度进行检测,使用7.2V锂电池进行供电,并用MPC5604MINI产生PWM波操纵电机模块和舵机模块,从而达到操纵小车的速度和转向。
本文要紧介绍主监控程序和行驶操纵程序的编写,确实是编写程序让小车各个部分和谐工作,让小车行驶并能够实现转向。
关键词:智能小车;MPC5604MINI;主控电路;行驶操纵。
AbstractThis article is based on National College "Freescale Cup" smart car competition as a research background.The research mainly uses Freescale's 32-bit singlechip as the core control unit MPC5604MINI,and Carried out on the road with a CCD information collection, and use encoder to detect the speed of the car, using a 7.2V lithium battery-powered and used to generate PWM wave MPC5604MINI module and servo motor control module, so as to control the car's speed and steering.This paper describes the preparation of the master control procedures and driving control program, is to write the program so that the coordination of the various parts of the car, so the car driving and steering can be achieved.Keywords: Smart car;MPC5604MINI;Control circuit;Driving control.目录摘要 (Ⅰ)Abstract (Ⅱ)1引言 01.1课题研究意义 01.2 智能小车国内外概况 01.2.1 国内研究概况 01.2.2 国外研究概况 (2)1.3 智能小车进展前景 (2)2 系统设计及方案论证 (3)2.1 系统设计要求 (3)2.2 系统设计方案 (2)2.2.1 主控芯片的选定 (3)2.2.2 传感器模块 (5)2.2.3 测速传感器模块 (5)2.2.4 转向舵机模块 (6)2.2.5电机驱动模块 (6)2.2.6国内外概况 (6)3系统硬件电路介绍 (8)3.1 主控芯片电路 (8)3.2 速度检测电路 (8)3.3 电机驱动电路 (8)3.4 舵机驱动电路 (9)3.5 拨码开关电路 (9)4 软件设计 (9)4.1软件流程 (10)4.1.1程序流程图 (10)4.1.2 程序流程图介绍 (10)4.2 CodeWarrior介绍 (11)4.2.1 CodeWarrior简介....................... 错误!未定义书签。
基于单片机的自动寻迹避障小车设计

三、软件设计
电机控制函数根据预设算法输出控制信号,控制电机的动作。最后,我们在 主程序中调用这些函数,实现小车的自动循迹避障寻光功能。
四、测试与结论
四、测试与结论
为了验证系统的可行性和稳定性,我们对智能小车进行了多次测试。测试结 果显示,该系统能够准确地检测黑色引导线、前方障碍物和光源,并能够根据预 设算法自动调整小车的行驶方向和速度,实现了自动循迹避障寻光功能。因此, 基于单片机技术的自动循迹避障寻光智能小车系统具有广泛的应用前景和市场潜 力。
三、实验与测试
三、实验与测试
1、实验环境:在实验室内模拟实际环境进行测试,包括各种路面情况(如平 滑路面、颠簸路面)、各种障碍物类型等。
三、实验与测试
2、测试指标:测试指标包括小车的平均速度、稳定性、准确性等。通过这些 指标可以评估小车的性能并对其进行优化。
三、实验与测试
3、实验结果分析:根据实验结果分析小车的性能表现,针对不足之处进行改 进和优化。
5、执行器
5、执行器
执行器包括舵机和摄像头。舵机用于调节小车的行驶方向,摄像头用于拍摄 和传输图像数据。
三、软件设计
三、软件设计
软件设计是实现小车自动循迹避障寻光功能的关键。我们使用C语言编写程序, 通过调用单片机的外设接口接收传感器数据,根据预设算法处理数据并输出控制 信号,控制电机驱动模块和执行器的动作。
3、传感器:传感器部分包括寻迹传感器和避障传感器。寻迹传感器用于检测 小车行驶路径,避障传感器则用于检测前方障碍物。常见的传感器类型有红外线 传感器和超声波传感器。
一、硬件设计
4、电机:电机部分包括两个电机和相应的驱动器。电机驱动器用于接收控制 器的指令,控制电机的转动方向和速度。
基于单片机的智能循迹小车设计
基于单片机的智能循迹小车设计智能循迹小车是一种基于单片机控制的小型车辆,通过传感器检测路面信息,结合预设路线实时调整行驶方向,实现自动循迹行驶。
智能循迹小车在无人驾驶、智能物流、探险救援等领域具有广泛的应用前景。
智能循迹小车的硬件主要包括单片机、传感器、电机和电源。
其中,单片机作为整个系统的控制中心,负责接收传感器信号、处理数据并输出控制指令;传感器用于检测路面信息,一般选用红外线传感器或激光雷达;电机选用直流电机或步进电机,为小车提供动力;电源为整个系统提供电能。
智能循迹小车的软件设计主要实现传感器数据采集、数据处理、控制指令输出等功能。
具体来说,软件通过定时器控制单片机不断采集路面信息,结合预设路线信息进行数据分析和处理,并根据分析结果输出控制指令,实现小车的自动循迹。
为提高智能循迹小车的稳定性和精度,需要对算法进行优化。
常用的算法包括PID控制、模糊控制等。
通过对算法的优化,可以实现对路面信息的精确检测,提高小车的循迹精度和稳定性。
为验证智能循迹小车的实际效果,需要进行相关测试。
可以在平坦的路面上进行空载测试,检验小车的稳定性和循迹精度;可以通过加载重量、改变路面条件等方式进行负载测试,以检验小车在不同条件下的性能表现;可以结合实际应用场景进行综合测试,以验证智能循迹小车在实际应用中的效果。
测试环境的选择要具有代表性,能够覆盖实际应用中可能遇到的各种情况。
测试过程中要保持稳定的行驶速度,以获得准确的测试数据。
对于测试过程中出现的问题,要及时记录并分析原因,以便对系统进行改进。
测试完成后,要对测试数据进行整理和分析,评估系统的性能表现,提出改进意见。
通过以上测试,我们发现基于单片机的智能循迹小车在循迹精度、稳定性等方面表现良好,能够满足实际应用中的需求。
同时,通过对算法的优化和硬件的改进,可以进一步提高小车的性能表现。
本文介绍了基于单片机的智能循迹小车的设计和实现过程。
通过合理选择硬件和优化软件算法,实现了小车的自动循迹功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要随着我国的电子科技的不断发展,我们生活中的自动化设备越来越多,也为嵌入式在智能化上的研究提供了一个广阔的平台。
本系统以MK60DN512VMD100微控制器为核心控制单元,选用OV7620 CMOS 模拟摄像头检测赛道信息,高速AD转换芯片选用TCL5510,将提取后的灰度图像进行软件二值化,进而提取赛道信息;用光电编码器实时检测小车的实时速度,采用PID控制算法调节电机的速度以及舵机转向,从而实现速度和方向的闭环控制。
关键字:MK60DN512VMD100,OV7620 CMOS,软件二值化,PIDAbstractWith the continuous development of electronic technology, more and more automation equipment into the production life of the people, the rapid development of embedded intelligent study provides a broader platform.In this paper, the design of intelligent vehicle system MK60DN512VMD100 microcontroller as the core control unit, the selection of OV7620 CMOSanalog cameras to detect the track information, to using TCL5510 high-speed AD converter chip, software binarization image, extract the white guide line for identification of the track information; optical encoder to detect the real-time speed of the model car, using the PID control algorithm to adjust the speed of the drive motor and steering the angle of the steering gear, in order to achieve closed-loop control of velocity and direction of the model car. Keywords: MK60DN512VMD100,OV7620 CMOS,software binarization, PID目录摘要 (I)Abstract .................................................................................................................................. I I 1前言 (1)1.1 设计的背景以及意义 (1)1.2 智能小车国内外概况 (1)1.2.1国内研究的概况 (1)1.2.2 国外研究概况 (2)1.3智能小车的发展前景 (2)2 飞思卡尔单片机自动循迹小车系统设计总方案 (3)2.1 系统硬件部分 (3)2.2 系统软件部分 (4)3 智能车硬件系统 (5)3.1 单片机最小系统 (5)3.1.1 PIT定时器模块 (6)3.1.2 PWM 模块 (6)3.1.3 I/O模块 (7)3.1.4 时钟电路 (7)3.1.5 复位电路 (7)3.1.6 JTAG接口电路 (8)3.2 电机驱动模块 (8)3.3路径识别摄像头检测模块 (9)3.3.1 摄像头的选择 (9)3.3.2 摄像头简介 (10)3.4 速度检测模块 (10)3.5 舵机模块 (10)3.6电源管理模块 (10)3.6.1 3.3V电源 (11)3.6.2 5V电源 (11)4 软件系统的设计与实现 (12)4.1赛道信息的提取 (12)4.2 PID算法介绍 (12)4.2.1 位置式PID (13)4.2.2 增量式PID (14)4.2.3 PID 参数整定 (14)4.3转向舵机的控制方法 (15)4.3.1 舵机的工作原理 (15)4.3.2 舵机的PID 控制 (15)5 开发平台介绍 (19)5.1 IAR Embedded Workbench IDE简介 (19)5.2 IAR Embedded Workbench的功能及特点 (19)5.3 硬件开发平台Altium Designer (22)6结论 (23)参考文献 (24)致谢 .................................................................................................... 错误!未定义书签。
附录1电路原理图 . (26)附录2 PCB图 (27)附录3 元件清单 (28)附录5 部分程序源代码 (29)1前言1.1 设计的背景以及意义在现代社会,汽车逐渐走进每个平民的家庭生活中,汽车行业发展迅速,同时交通事故也大大增多,每一分钟都有人死于车祸。
近几年智能系统的发展迅速,智能车的研究成为了当下的研究热点。
智能汽车研究涉及了很多领域,最直接的表现是要实现汽车的自动驾驶。
要实现自动驾驶就离不开智能化系统的设计,同时要求智能车能感知周围的环境。
一旦智能车投入使用,就会降低当前社会交通事故的发生率,同时能够大大提高现有交通道路的使用效率,并且能在一定程度上缓解能源危机的到来,降低广大人民的劳动强度,给人们一个更好的未来。
1.2 智能小车国内外概况1.2.1国内研究的概况我国在智能车的研究中投入了大量的资金和精力,为了能够培养出自己的研究骨干,在教育部的牵头下,我国组织了智能小车的高校比赛,以此来培养最基本的研究人才,这也符合我国的人才强国战略。
这项比赛用的是飞思卡尔公司产的芯片,第一届比赛在清华大学举办,得到了各大高校的积极响应,取得了良好的效果。
该项比赛,韩国有丰富的经验,他们已举办多届此类比赛。
因为此项比赛涉及到了很多专业知识,尤其是必须要掌握自动控制、电子、计算机等多个领域的知识,所以能够提高大学生的知识水平。
另外,比赛还可以提高学生的动手能力,弥补现在教育的弊端。
前两届比赛中组委会统一规定了赛车的模型,微型控制器选用当时最流行的16位微型控制器MC9S12DG128,该控制器为飞思卡尔公司生产,性能优良,功能可靠。
现在比赛最常用的是32位的Kinetis系列,主要包括Kinetis E,EA,M,L 等系列、32位的MPC56xx系列、32位的Kinetis(ARM® CortexTM-M4),主要包括Kinetis W,K等系列、16位的9S12系列、32位的DSC系列、ColdFire系列和8位的单片机系列(可使用两片)。
飞思卡尔赛车比赛规定各队在符合条件规定的情况下,赛车跑完全程时间最短者获胜,我国在2007年的比赛中首次打败了韩国队,终止了其七连冠的记录。
我国已经成功的举办了10次该项比赛,参加比赛的学校大概已经有300所,它们来自全国各地,分布在30个省市、自治区。
飞思卡尔比赛在我国已经办了多年,参赛队伍逐年增加,技术也相当成熟,学生们发挥自己的想象力,在原有技术上进行了大胆创新,取得了不错的效果。
现在一些早期的学生已经投入到实际的智能汽车的研究之中。
1.2.2 国外研究概况在飞思卡尔半导体公司的资助下,韩国在全球第一次举办了全国性质的高校智能小车比赛,并且取得了非常好的效果。
第一届比赛要求参赛队选用大赛方指定的HCS12单片机、车模以及电动机。
大赛规定,跑完全程用时最短的队伍获胜。
参赛队伍需要自己学习并且应用嵌入式软件开发工具Codewarrior和在线开发发技术,自主开发识别最佳的行进路线,自行设计电机的驱动电路、检测电路、舵机电路,以及相应的程序编写。
此项比赛举办以来,已经得到了广大企业的认可,他们认为这项比赛提高了学生们的创新能力。
这也是参赛队员在设计小车时不断积累经验,不断推陈出新,敢于创新的得结果。
韩国于2000年举办了第一届该类比赛的,由汉阳大学承办。
在韩国每年的参赛队达到100多支,很多学校都会派出自己的队伍。
韩国的企业也非常重视这项比赛,每年企业都会拿出非常丰厚的奖品,比如特等奖就奖给队员一辆现代汽车。
甚至获奖选手可以有机会到德国宝马的总部研究学习。
这些奖励不仅体现了企业对人才的重视,而且促进了学生的积极性。
如今的比赛不仅仅限于一国之内,高校的参赛队伍已经走出了国门,形成国际比赛机制。
2013年举办的国际赛当中,中国队以绝对的优势击败了美国队、日本队、巴西队、印度队、中国台湾队、墨西哥队、马来西亚队以及捷克与斯洛伐克队。
国际赛的举办增进了各国的技术交流,对智能车的比赛以及技术的创新起到了积极的作用。
1.3智能小车的发展前景在智能车的研发方面,我国与欧洲、美国、日本等国家还有一些差距。
智能车的开发需要很多领域的结合,如信息技术、计算机技术、电子技术等多个领域[1],在这些领域我国也有了很高的发展。
面对这个集汽车制造行业、信息与通信产业和交通系统复合的全新领域,我国有能力抢占这个高新技术的制高点,在未来的国际竞争中取得有利位置。
我国必须把握这次机遇,制定好相应的计划、战略方针以及落实到实处的措施,统筹管理,逐渐缩小与发达国家在智能车领域的差距并且超过他们。
2 飞思卡尔单片机自动循迹小车系统设计总方案本设计的核心是基于K60的主控模块,车速由电机驱动模块控制、转向问题由舵机模块来控制、小车速度的检测交由测速传感器模块的检测,预判行进的路线由路径识别模块来决定。
本设计实现的功能是在特定的跑道上小车自动行驶,完成在转弯处减速、在直道上加速行驶。
本系统由两部分组成即硬件部分和软件部分。
2.1 系统硬件部分本毕业设计选用飞思卡尔公司推出的32位K60微控器作为小车的核心控制单元。
路径识别模块采用摄像头检测技术,将采集到的图像信息转化成电平信号送给微控单元K60。
同时速度检测模块收集到的信息同样转换成电平信号送给微控单元K60。
微控单元经过内部的处理,输出PWM信号,控制电机转速以及舵机转向,达到控制速度和自动行驶的目的。
要使智能小车又快又稳的行驶,不仅要控制好舵机的转向还要控制好车速。
这样才能使小车在转弯的时候不会因为速度太快而偏离跑道,因此我们需要检测小车的速度,并且采取闭环的反馈机制。