带霍尔信号的增量式光电编码器在控制器测速中的应用
增量式编码器测速原理
增量式编码器测速原理
增量式编码器测速原理是基于旋转的物体在一定时间内旋转的角度与时间的关系进行测速的一种方法。
增量式编码器是一种能够将物体旋转运动转化为电信号输出的装置。
增量式编码器由光电光栅和相应的信号处理电路组成。
光电光栅是由透明条和不透明条交替组成的,当物体旋转时,光栅会被遮挡或透射,产生光电信号。
这些光电信号经过信号处理电路处理,得到与物体旋转角度相关的电信号。
增量式编码器测速的基本原理是通过记录物体旋转的时间和角度来计算物体的线速度。
首先,通过检测信号处理电路中的脉冲数量来确定物体旋转的角度,这里每个脉冲对应一个透明条或不透明条的通过。
然后,根据测得的旋转角度和已知的时间间隔,计算出物体旋转的角速度。
最后,通过将角速度乘以物体的半径,可以得到物体的线速度。
增量式编码器的测速原理基于旋转角度与时间的关系,可以精确地测量物体的线速度。
它在工业自动化控制、机器人等领域广泛应用。
由于其测速精度高、测量范围大、抗干扰能力强等优点,成为一种重要的测速装置。
增量式光电旋转编码器及在角减速度测量中的应用
’
增量式光电旋转编码器原理
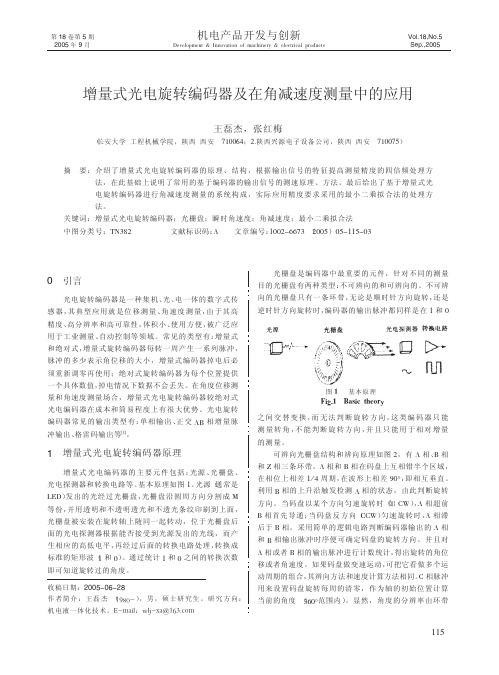
增量式 光 电 编 码 器 的 主 要 元 件 包 括 : 光源、 光栅盘、
光电探测器和转换电路等。 基本原理如图 $。 光源( 通常是 发出的光经过光栅盘, 光栅盘沿圆周方向分割成 ) &’() 等份, 并用透明和不透明透光和不透光条纹印刷到上面, 光栅盘被安装在旋转轴上随同一起转动,位于光栅盘后 面的光电探测器根据能否接受到光源发出的光线,而产 生相应的高低电平, 再经过后面的转换电路处理, 转换成 标准的矩形波( 。通过统计 $ 和 * 之间的转换次数 $ 和 *) 即可知道旋转过的角度。
收稿日期:!""#$"%$!& 作 者 简 介 :王 磊 杰 ( ,男 ,硕 士 研 究 生 。 研 究 方 向 : !"#$% ) 机电液一体化技术。&%’()*:+*,%-(.!/0123’
$$7
・测试与控制・
# ’ ’ # ’ ’ 4 $ ?相 % ? &’ &" &( &) &@ 4 4 $ 4 4 ’ ’ 4 % 4 4 4 4 4 ’ ’ 4
( 上接第 ""> 页)
合的编码器,除增量式外还有绝
影响,从而在后面的脉冲信号软件处理部分采取响应的 数学计算方法提高测量精度。 参考文献:
胡瑜, 董 彬 $ 光 电 旋 转 编 码 器 的 研 究 与 应 用 !%#$ 仪 表 技 术 与 !"# 常 春 , 传感器, &’’" , "&$
对式编码器。由于编码器的测量精度高、 速度快、 范围广、 成本低、操作简便等诸多优势,已经逐步取代了传统测 速、 测加速的元件和方法。在实际应用当中, 应根据使用 对象的速度情况,合适选择应当采用的测速方法以避免 出现较大的误差。另外, 在测速和测加速度过程中, 应考 虑到编码器光栅盘栅隙分布的不均匀对测量结果产生的
增量编码器的应用及工作原理
增量编码器的应用及工作原理一. 什么是增量编码器增量编码器是一种用于测量旋转轴、线性运动、加速度等位置和运动的设备。
它通常由一个光学传感器和一个旋转或线性标尺组成。
增量编码器通过传感器读取标尺上的刻度信息,然后将其转化为电信号,以供计算机或控制系统进行处理。
增量编码器广泛应用于工业自动化控制、机械工程、仪器仪表等领域。
它可以用于位置测量、速度测量、角度测量、角度加速度测量等应用。
二. 增量编码器的工作原理增量编码器的工作原理基于光电传感技术。
光电传感器通过感知物体上的刻度变化来测量位置和运动。
1.标尺:增量编码器通常使用一个旋转或线性刻度,该刻度被放置在测量对象上。
刻度上的刻线间距等于一个单位。
2.发光二极管(LED):增量编码器使用一个发光二极管(LED)发射光束,该光束照射在标尺上。
3.光电传感器:光电传感器接收由标尺上的刻度反射回来的光束,并将其转换成电信号。
4.信号处理:增量编码器的信号处理电路将光电传感器产生的电信号转换成脉冲信号,以供计算机或控制系统使用。
通常,脉冲数等于刻度的单位数。
三. 增量编码器的应用增量编码器广泛用于以下领域和应用:1.位置测量:增量编码器可以用来测量旋转轴或线性运动轴的位置。
它可以提供非常高的精度和分辨率。
2.速度测量:通过测量增量编码器脉冲信号的频率,可以计算出测量物体的速度。
3.角度测量:由于增量编码器是用于测量旋转轴的位置的,因此它也可以用于测量物体的角度。
4.角度加速度测量:通过测量增量编码器脉冲信号的变化率,可以计算出物体的角度加速度。
5.自动控制系统:增量编码器可以与计算机或控制系统连接,用于自动控制系统的位置反馈和运动控制。
6.机器人和CNC:在机器人和CNC(数控机床)等自动化系统中,增量编码器常用于测量机械臂、导轨和进给轴的位置和运动。
四. 增量编码器的优点和缺点增量编码器具有以下优点:•高精度:增量编码器可以提供非常高的位置测量精度和分辨率。
增量式编码器的应用原理
增量式编码器的应用原理1. 什么是增量式编码器?增量式编码器是一种测量旋转或线性运动的设备,它通过检测位置变化的脉冲数来确定运动的大小和方向。
它通常由旋转编码器和线性编码器组成。
2. 旋转编码器的工作原理旋转编码器是一种传感器,常见的类型包括光电式编码器和磁式编码器。
下面以光电式编码器为例,介绍旋转编码器的工作原理。
2.1 光电式编码器的组成光电式编码器由光源、光电传感器和编码盘组成。
编码盘上有一系列的透明和不透明的刻线,光源照射在编码盘上,光电传感器接收到反射回来的光信号。
2.2 光电式编码器的工作原理当旋转编码器转动时,光线会在透明和不透明的刻线之间交替,光电传感器会依次感受到光和暗。
根据光电传感器感受到的光和暗的变化情况,可以计算出旋转的角度。
2.3 旋转编码器的输出信号旋转编码器的输出信号通常是一个脉冲序列,每个脉冲对应着编码器转动的一个固定角度。
通过计算脉冲数,可以确定旋转的相对位置和方向。
3. 线性编码器的工作原理线性编码器用于测量线性运动,常见的类型包括光栅尺和线性光电编码器。
下面以光栅尺为例,介绍线性编码器的工作原理。
3.1 光栅尺的组成光栅尺由导轨、刻线、读取头和光电传感器组成。
刻线是一系列的透明和不透明的线条,读取头安装在测量目标上,光电传感器接收到反射回来的光信号。
3.2 光栅尺的工作原理当测量目标移动时,光线会在透明和不透明的线条之间交替,光电传感器会依次感受到光和暗。
根据光电传感器感受到的光和暗的变化情况,可以计算出线性运动的大小。
3.3 线性编码器的输出信号线性编码器的输出信号通常是一个脉冲序列,每个脉冲对应着线性运动的一个固定距离。
通过计算脉冲数,可以确定线性运动的相对位置和方向。
4. 增量式编码器的应用增量式编码器广泛应用于机械设备和自动化控制系统中,常见的应用场景包括:•位置测量:增量式编码器可以用于测量机械装置的位置,例如机械臂的关节角度。
•速度测量:通过对增量式编码器的脉冲数进行计数,可以计算出机械装置的运动速度。
基于增量式光电编码器电机测速系统的设计
基于增量式光电编码器电机测速系统的设计
丁卫东;朱卫民;曹玲芝
【期刊名称】《郑州轻工业学院学报(自然科学版)》
【年(卷),期】2013(000)006
【摘要】采用光电编码器作为电机测速元件,设计了基于增量式光电编码器电机测速系统。
该系统中,光电编码器的输出脉冲经斯密特触发器整形后,由单片机进行采集、计算,测得的电机旋转速度和方向由 LCD 进行显示,测速周期由键盘进行设定,测速算法采用 M/T 法。
该系统测量精度高,可实时显示,适用于运行时振动较小的电机测速。
【总页数】4页(P95-97,108)
【作者】丁卫东;朱卫民;曹玲芝
【作者单位】郑州轻工业学院电气信息工程学院,河南郑州 450002;河南省计量科学研究院,河南郑州 450008;郑州轻工业学院电气信息工程学院,河南郑州450002
【正文语种】中文
【中图分类】TM930
【相关文献】
1.基于单片机的电机测速系统设计 [J], 陆丽婷;项岩
2.基于增量式光电编码器的电机测速研究 [J], 刘玉凤;刘学军
3.基于IAP15W4K58S4单片机的直流电机测速系统设计 [J], 张桂红
4.基于51单片机和无线传输的直流电机调速测速系统设计 [J], 陈庭伟;林艺帆;刘巧
5.基于51单片机和无线传输的直流电机调速测速系统设计 [J], 陈庭伟;林艺帆;刘巧;
因版权原因,仅展示原文概要,查看原文内容请购买。
简述增量编码器的工作原理及应用
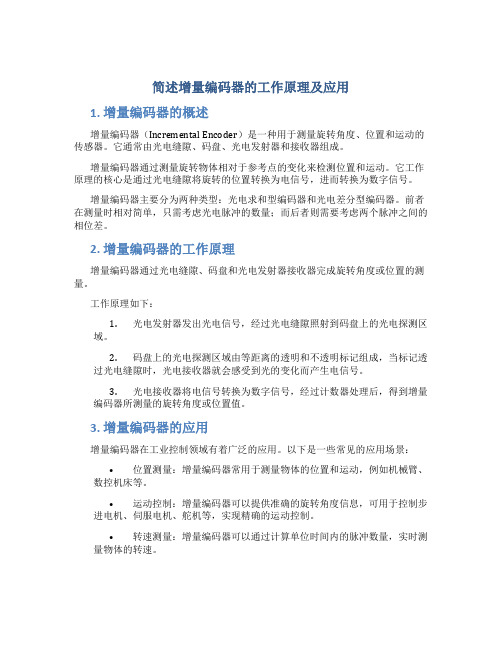
简述增量编码器的工作原理及应用1. 增量编码器的概述增量编码器(Incremental Encoder)是一种用于测量旋转角度、位置和运动的传感器。
它通常由光电缝隙、码盘、光电发射器和接收器组成。
增量编码器通过测量旋转物体相对于参考点的变化来检测位置和运动。
它工作原理的核心是通过光电缝隙将旋转的位置转换为电信号,进而转换为数字信号。
增量编码器主要分为两种类型:光电求和型编码器和光电差分型编码器。
前者在测量时相对简单,只需考虑光电脉冲的数量;而后者则需要考虑两个脉冲之间的相位差。
2. 增量编码器的工作原理增量编码器通过光电缝隙、码盘和光电发射器接收器完成旋转角度或位置的测量。
工作原理如下:1.光电发射器发出光电信号,经过光电缝隙照射到码盘上的光电探测区域。
2.码盘上的光电探测区域由等距离的透明和不透明标记组成,当标记透过光电缝隙时,光电接收器就会感受到光的变化而产生电信号。
3.光电接收器将电信号转换为数字信号,经过计数器处理后,得到增量编码器所测量的旋转角度或位置值。
3. 增量编码器的应用增量编码器在工业控制领域有着广泛的应用。
以下是一些常见的应用场景:•位置测量:增量编码器常用于测量物体的位置和运动,例如机械臂、数控机床等。
•运动控制:增量编码器可以提供准确的旋转角度信息,可用于控制步进电机、伺服电机、舵机等,实现精确的运动控制。
•转速测量:增量编码器可以通过计算单位时间内的脉冲数量,实时测量物体的转速。
•距离测量:通过将增量编码器与测程装置结合,可以实现距离测量功能。
•姿态测量:增量编码器可以用于姿态测量,例如飞行器的姿态控制。
•研究与开发:在机器人研究、无人驾驶车辆等领域,增量编码器可以提供精确的位置和运动信息,为算法的开发与测试提供基础数据。
4. 总结增量编码器是一种常用的位置和运动传感器,通过光电缝隙、码盘和光电发射器接收器完成测量。
它在工业控制和自动化领域有着广泛的应用,可用于位置测量、运动控制、转速测量、距离测量、姿态测量等方面。
基于增量式光电编码器的电机测速研究
2000.25(12):38—40.
[4]史晓娟.基于cPLD的四倍频鉴相计数电路在运动控 制器中的应用[J].制造技术与机床,2008,16(6):85— 图4算法的中断子程序流程
基于增量式光电编码器的电机测速研究
刘玉凤,刘学军 (南京航空航天大学自动化学院,江苏南京210016)
Research
on
Measuring the Speed of Motor Based
LIU Yu—fbI堰,LIU
on
Increamental Optical一electrical Encoder
Abstract:Based
on
编码器对电机的速度进行检测。 1
增量式光电编码器原理及四倍频电 路
1.1
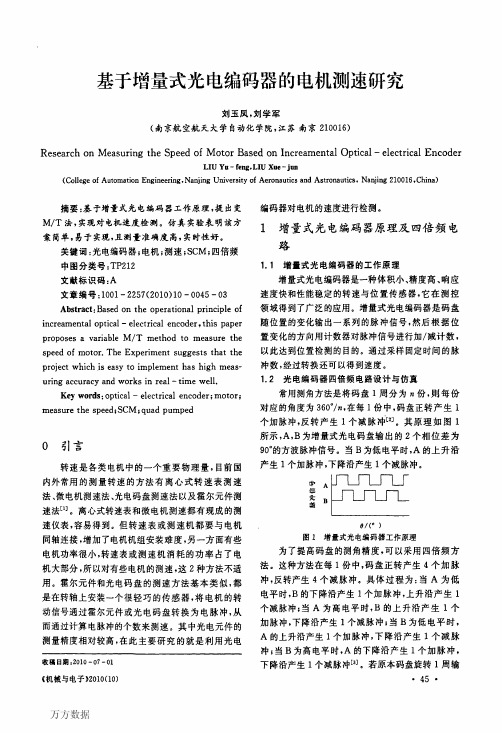
增量式光电编码器的工作原理 增量式光电编码器是一种体积小、精度高、响应
速度快和性能稳定的转速与位置传感器,它在测控 领域得到了广泛的应用。增量式光电编码器是码盘 随位置的变化输出一系列的脉冲信号,然后根据位 置变化的方向用计数器对脉冲信号进行加/减计数, 以此达到位置检测的目的。通过采样固定时间的脉 冲数,经过转换还可以得到速度。 1.2光电编码器四倍频电路设计与仿真 常用测角方法是将码盘l周分为咒份,则每份 对应的角度为360。/以,在每l份中,码盘正转产生1 个加脉冲,反转产生1个减脉冲[2]。其原理如图1 所示,A,B为增量式光电码盘输出的2个相位差为
《机械与电子》2010(10)
永磁同步电机带霍尔及增量式编码器的伺服控制
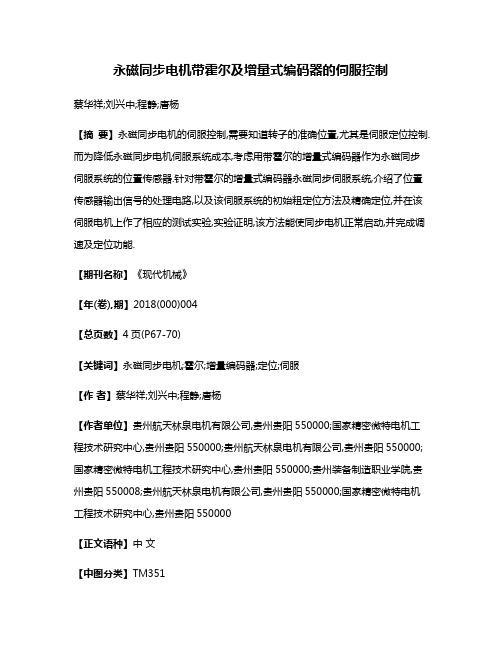
永磁同步电机带霍尔及增量式编码器的伺服控制蔡华祥;刘兴中;程静;唐杨【摘要】永磁同步电机的伺服控制,需要知道转子的准确位置,尤其是伺服定位控制.而为降低永磁同步电机伺服系统成本,考虑用带霍尔的增量式编码器作为永磁同步伺服系统的位置传感器.针对带霍尔的增量式编码器永磁同步伺服系统,介绍了位置传感器输出信号的处理电路,以及该伺服系统的初始粗定位方法及精确定位,并在该伺服电机上作了相应的测试实验,实验证明,该方法能使同步电机正常启动,并完成调速及定位功能.【期刊名称】《现代机械》【年(卷),期】2018(000)004【总页数】4页(P67-70)【关键词】永磁同步电机;霍尔;增量编码器;定位;伺服【作者】蔡华祥;刘兴中;程静;唐杨【作者单位】贵州航天林泉电机有限公司,贵州贵阳550000;国家精密微特电机工程技术研究中心,贵州贵阳550000;贵州航天林泉电机有限公司,贵州贵阳550000;国家精密微特电机工程技术研究中心,贵州贵阳550000;贵州装备制造职业学院,贵州贵阳550008;贵州航天林泉电机有限公司,贵州贵阳550000;国家精密微特电机工程技术研究中心,贵州贵阳550000【正文语种】中文【中图分类】TM3510 引言随着科学技术的不断进步,电力电子技术的快速发展,永磁同步电机因其高效率、高功率密度、低损耗等特点,逐渐被广泛应用于各种要求高响应、高精度、宽调速的高性能伺服控制系统,如机器人、转台、电动汽车以及数控机床等领域[1]。
然而不同于直流电机的有刷换向,同步电机的运转需要实时提供转子位置,以便电机能进行正确的换向。
同步电机的位置信号获取主要有两种方式:一种通过位置传感器获取实时位置信号;另一种是无位置控制,通过无位置控制算法,实时估计出一个转子位置,来保证电机换向[2]。
前者主要应用于需要高精度定位的伺服控制场合,后者则主要应用于伺服调速系统。
对于需要高精度伺服定位控制系统,选用的位置传感器有光栅尺、绝对式编码器、旋转变压器以及增量式编码器几种[3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
带霍尔信号的增量式光电编码器在控制器测速中的应用
一、增量式光电编码器基础
●增量式光电编码器示意图
●在码盘上均匀地刻制一定数量的光栅,光栅一侧固定有光接收传感器,另一侧有固定光
源,使用时码盘随电机轴同步转动
●码盘转动产生A、B和Z信号,A和B存在90度的相位差,用以产生正交脉冲信号,测
定位置增量,Z信号每转一圈触发一个窄脉冲,用来做基准校准
二、QEP信号解码
●增量式旋转光电编码器输出A、B(占空比50%)和Z信号及其对应互补的差分信号,滤
波后经差动放大器分别输出QEP_A、QEP_B和QEP_INDEX三路信号,接入到DSP的QEI 模块这些波形的时序如下图
●根据A、B信号相位超前或滞后可以判断转向,脉冲的上下沿捕捉可以产生4倍频信号
提高编码器的分辨率,脉冲累加计数用来计算转子相对于Z起始点的确切位置
三、带定位信号U、V和W信号的增量式光电编码器
●U、V和W信号用来给转子做初始定位,这三个脉冲互差120º电角度方波信号类似于直
流无刷电机位置传感器HALL的输出信号,在一个电角度周期,三个信号的输出组成6个状态,每个状态60º电角度
●要使U、V和W信号能判断转子的初始定位,需要将U相信号上升沿和电机反电势和由
负到正过零点位置对齐
四、增量式光电编码器初始位置
●编码器U信号和Z信号的关系
●上面提及U、V和W信号类似于直流无刷的HALL传感器的信号,通常使用HALL使用时
已经把1个HALL安装到A相电机绕组磁势轴线位置,另外两个依次按照120º电角度顺序安装好,这样U相信号上升沿和电机A相反电势和由负到正过零点位置对齐,该位置定义为初始位置,此时。
绕组A相轴线和转子D轴对齐
●编码器安装好后,U相信号上升沿位置也就确定,所以编码器的初次安装一般而言需要
将U相信号标定到A相电机绕组磁势轴线位置
●Z信号触发信号通常而言和编码器U相信号上升沿对齐,如果有偏差,需要加上校正因
子,这样Z信号就能反应电机的U相反电势零点位置即初始位置的位置
●编码器安装好后,编码器U相信号和Z触发信号的位置是固定的,和A相绕组轴线存在
着对应关系,但电机转子的位置是随机的,可能在0到360º电角度6个扇区之间的任何一个位置,每个扇区的轴线与转子的D轴是随机的,定义该值θz。
θz的物理含义是:每个扇区的轴线与转子D轴位置的差值。
该差值是物理存在的,在矢量控制之前必须要学到
五、转子相位初始化
●对于采用带U,V,W磁极信号的编码器来说,采用这个编码器能够把一个电角度周期分成
6个区间。
当系统上电时,检测U,V,W三相的状态能够知道当前在哪个区间(0~5),从而得到θe=θZ+n*60+30.
●由于U,V,W只能分辨60º电角度,以0区间为例,电角度表示范围在0~60º之间,取其
中间值30º代表当前位置
●对于磁钢表贴式永磁电机,通常采用id=0的控制方式,定子磁链矢量超前转子D轴90
º时力矩最大,用编码器U、V和W相脉冲信号定位时由于有30º的电角度误差,所以定子磁链矢量超前磁极位置不一定刚好是90º,而是在60º-120º之间。
这时转矩不是最大,但足够启动电机,当Z信号触发脉冲到来时就能重新修正转子的位置,之后使用A、B 脉冲的信号获取精确的转子位置信号
下图为教科书通常的转子相位初始化示意图。