电机编码器测速-SJTU
编码器测速的标准写法
编码器测速的标准写法全文共四篇示例,供读者参考第一篇示例:编码器是一种用于测量物体运动速度的设备,可以通过测量物体上的编码器产生的脉冲数来计算物体的速度。
编码器测速是自动化控制系统中常见的一项技术,广泛应用于各种行业和领域。
编码器测速的标准写法包括以下几个步骤:第一步,选择合适的编码器。
在进行编码器测速之前,首先需要选择适合的编码器。
根据测量的需求和要求,选择能够满足相关技术指标和性能要求的编码器。
常见的编码器类型有光栅编码器、绝对值编码器和增量式编码器等。
第二步,安装编码器。
在测速过程中,编码器的位置和安装方式对测速结果有很大影响。
在安装编码器时,需要保证编码器与被测物体之间的机械连接牢固可靠,避免因机械松动或偏移导致测速误差。
第三步,连接编码器。
将编码器与测速设备进行连接,通常通过编码器的输出信号线接入计数器或编码器解码器等设备。
要确保连接可靠和正确,避免因信号线接错或连接不良导致数据采集错误。
第四步,设置测速参数。
在进行编码器测速之前,需要对测速设备进行参数设置。
根据实际需求,调整测速设备的计数分辨率、采样频率和滤波参数等,以确保测速结果的准确性和稳定性。
第五步,进行校准和调试。
在进行实际测速之前,需要对编码器进行校准和调试。
通过旋转物体,观察编码器输出的脉冲信号变化,调整接收设备的参数,使得测速结果与实际速度一致。
第六步,进行实际测速。
在完成以上步骤之后,即可进行实际的编码器测速。
通过监测编码器输出的脉冲信号,计算物体的速度,并输出测速结果。
根据实际需求,可以选择连续测速或单次测速模式,以满足不同的应用场景。
编码器测速是一项重要的技术,在自动化控制系统和工程领域有着广泛的应用。
通过合理选择编码器、正确安装和连接、设置参数、校准调试以及实际测速等一系列步骤,可以实现准确可靠的物体测速,为相关应用提供重要的技术支持。
希望以上内容对您有所帮助,谢谢!第二篇示例:编码器是一种常用于测速的设备,通过检测旋转轴的角度变化,可以准确地计算出物体的旋转速度。
上海13位pn总线编码器使用手册
上海13位pn总线编码器使用手册上海13位PN总线编码器使用手册一、产品介绍上海13位PN总线编码器是一种高性能的旋转位置传感器,可用于测量机械设备的旋转位置。
该编码器采用PN总线通信协议,具有高速、高精度、抗干扰等特点,并且易于安装和维护。
二、产品参数1. 分辨率:13位2. 电源电压:DC 5V3. 工作温度:-40℃~+85℃4. 输出信号:PN总线5. 最大转速:6000rpm(标准型)三、安装与连接1. 安装(1)将编码器固定在机械设备上,并确保其与旋转轴垂直。
(2)调整编码器与旋转轴之间的距离,使其符合技术要求。
(3)连接编码器和控制系统。
2. 连接(1)将编码器的电源接入DC 5V电源。
(2)将编码器的PN总线输出接入控制系统。
四、使用方法1. 开始使用前,请确保已正确安装和连接编码器。
2. 打开控制系统并进行初始化设置。
3. 将编码器输入信息与控制系统进行匹配。
4. 进行相关操作并观察编码器输出结果。
五、注意事项1. 在使用编码器时,请勿超过其最大转速。
2. 操作时请注意避免机械设备与编码器之间的碰撞和摩擦。
3. 请勿将编码器暴露在高温、高湿度或强磁场等环境中。
4. 请勿随意更改编码器的设置和参数,以免影响其正常工作。
5. 如有任何问题,请及时联系厂家或专业技术人员进行处理。
六、维护与保养1. 定期清洁编码器表面,避免灰尘和杂物进入内部。
2. 如发现故障,请立即停止使用并联系厂家或专业技术人员进行处理。
3. 长期不使用时,请将编码器存放在干燥、阴凉处,并避免受到振动和冲击。
七、常见问题解决方法1. 编码器输出信号不稳定解决方法:检查连接线路是否正确,是否存在干扰源。
2. 编码器无法正常工作解决方法:检查电源是否正常,是否存在损坏情况。
3. 编码器分辨率不够高解决方法:更换具有更高分辨率的编码器。
八、联系方式如有任何问题或需要进一步了解产品信息,请联系上海13位PN总线编码器厂家:地址:上海市XX区XX路XX号电话:XXX-XXXXXXX邮箱:*************九、结语本手册详细介绍了上海13位PN总线编码器的使用方法、注意事项和常见问题解决方法,希望能够对用户在使用过程中提供帮助,并确保其正常工作。
角度编码器的校准和应用

国内统一刊号CN31-1424/TB2019/5 总第276期0 引言角度编码器作为一种常用的高准确度测量仪器,按工作原理划分可分为增量型和绝对值型。
增量式编码器是将角度变化转换成周期信号,再把这个信号转化为计算脉冲,用脉冲个数计算角度数值。
绝对值型角度编码器的每一个角度位置对应一个确定的代码,因此它的示值只与测量的起止位置有关,和测量过程无关。
按输出结果可划分为两个类型,直接输出角度型和输出电信号或编码型。
角度编码器在汽车制造行业应用最为广泛,准确校准角度编码器的相关参数是非常重要的。
1 校准方法角度编码器一般采用与标准角度器件或圆分度仪器比较的方法来校准。
利用标准角度器件测量时,一般选择用于细分角度值的奇数面正多面棱体,搭配高精度自准直仪组成测量系统。
将角度编码器的基座固定在平板上,并在同一块平板上放置自准直仪。
利用轴套和夹具将编码的转轴和棱体连接在一起,使转轴和棱体的旋转中心同轴并保持同步旋转,不能有间隙和卡顿。
调整自准直仪的位置,使其光轴通过角度编码器和棱体的旋转轴并与之垂直。
角度编码器处于零位时,调整自准直仪读数为零。
角度编码器依次旋转至棱体每个工作面对应的标准角度位置,通过自准直仪的读数计算角度编码器的角度误差。
角度编码器不能承受重物,棱体的自重不能直接施加在角度编码器上,旋转过程中如何保持同步并精准地旋转到棱体标准角度的附近位置都是在系统设计过程中需要解决的问题。
利用圆分度仪器也可校准角度编码器的分度误角度编码器的校准和应用孙佳媛 刘芳芳 马建敏 / 上海市计量测试技术研究院差。
通过夹具将角度编码器的转轴固定在圆分度仪器的旋转中心,使其顺滑、同步旋转,固定角度编码器的基座。
角度编码器的转轴与基座产生相对旋转输出角度值,与圆分度仪器的示值对比得到角度编码器的角度误差。
在这种测试方法中,倒置的角度编码器如何调整同轴、固定基座的同时不给转轴施加偏向力等都是需要解决的问题。
在日常工作中,及时总结经验,摸索出一种易于操作的校准方法。
微型光电编码器在电机角速率辨识中的应用
第18卷 第8期2010年8月光学精密工程Optics and P recision EngineeringV ol.18 N o.8 A ug.2010收稿日期:2009 07 31;修订日期:2009 11 09.基金项目:吉林省科技厅自然科学基金资助项目(N o.20030534)文章编号 1004 924X(2010)08 1738 08微型光电编码器在电机角速率辨识中的应用李 琳1,2,厉 明1,2,艾 华1(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;2.中国科学院研究生院,北京100039)摘要:针对电机伺服控制系统利用编码器角位置信息预测角速率的需求,提出并实现了一种基于平稳卡尔曼滤波的编码器信号处理方法。
首先,分析了典型电机系统的结构及测量噪声编码器的组成,在此基础上建立了电机系统和编码器的参数化数学模型,并根据电机系统和编码器模型给出了统一的参数化平稳卡尔曼滤波器设计结果。
在M atlab/Simulink 环境下完成了电机、编码器和卡尔曼滤波器的仿真模型,并利用不同参数对参数化平稳卡尔曼滤波器的普适性和滤波效果进行了预测。
最后,搭建了实验平台,对仿真结论进行验证并对滤波性能进行了实测。
仿真和实验结果表明:参数化滤波模型对典型电机系统具有普适性,自适应平稳卡尔曼滤波器可以利用编码器信号实现角速率的最优估计,误差标准差为0.021( )/s,最大误差可以控制在0.06( )/s 之内,能够满足一般电机伺服系统对角速率精度的要求。
关 键 词:平稳卡尔曼滤波;编码器;电机;角速率;M atlab/Simulink中图分类号:T P212.12 文献标识码:A doi:10.3788/O PE.20101808.1738Application of miniature optical encoders toangular rate identification of motorsLI Lin 1,2,LI Ming 1,2,AI H ua 1(1.Chang chun I nstitute of Op tics ,Fine Mechanics and P hy sics ,Chinese A cademy of Sciences,Chang chun 130033,China;2.Gr aduate Univ er sity of Chinese A cad emy of Sciences ,Beij ing 100039,China)Abstract:A sig nal processing method fo r encoders based on statio nary Kalm an filter technolog y is im plemented to satisfy the r equirements of angular rate prediction of a servo contr ol sy stem.Firstly,the ty pical structure of a motor system and the com po sitio n o f an optical encoder for measur ing no ises are analyzed,and the parametr ic m athematical mo del o f the m otor system and o ptical enco der is built fo r statio nary Kalman filter desig n.T hen,the unifor m parametric design results of stationary Kalm an fil ter ar e pr esented by using the m odel.U nder the M atlab/Simulink environment,the simulation mo del of the motor sy stem,optical encoder and Kalman filter is completed and the universality and filtering effect of parametric stationary Kalm an filter are predicted by different par am eters.Finally,an experi m ental platform is built to v erify the sim ulation conclusio n,and the filtering perform ance is m easured.The sim ulation and ex periment results show that the par am etric stationary Kalman filter is univ ersalizable fo r mo to r sy stems and the adaptive statio nary Kalm an filter can estimate the ang ular rates by u sing o ptical encoders.Obtained data indicate that the standard dev iation is 0.021( )/s and the max i m um error can be co ntro lled under 0.06( )/s,w hich can satisfy the requirements of mo to r contro l system s fo r the ang ular rate precision.Key words:stationar y Kalm an filter;optical encoder;m otor;ang ular rate;M atlab/Simulink1 引 言编码器作为典型的角位置测量元件,具有精度高、抗干扰能力强等一系列优点,目前已经广泛应用于电机伺服控制领域[1],如应用编码器直接测量的角位置信息进行角速率辨识等。
简述编码电机测速的基本工作原理
简述编码电机测速的基本工作原理
编码电机测速的基本工作原理是通过编码器来测量电机转速的一种技术。
编码器是一种测量运动的装置,它由光传感器和光栅组成。
在编码电机测速中,光栅固定在电机轴上,而光传感器则固定在电机壳体上。
当电机转动时,光栅会与光传感器之间产生光遮断和透过的周期性变化。
光传感器检测到光线的变化,并将其转化为电信号。
根据捕捉到的光电信号变化,我们可以计算出转轴的转速。
通常情况下,编码器旋转一周会输出固定的脉冲数,即编码器的分辨率。
通过测量固定时间T内编码器输出的脉冲数,即可求得电机的转速。
假设编码器的分辨率为P,T时间内测得脉冲数m个,则单倍频(编码器转动一圈输出的脉冲数与分辨率相同)情况下电机转速为m/p(其中m/p为编码器转过的圈数,再除以时间即为转速)。
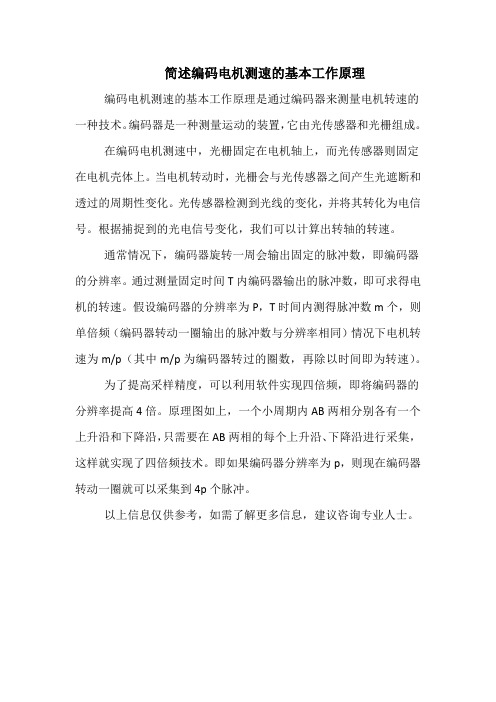
为了提高采样精度,可以利用软件实现四倍频,即将编码器的分辨率提高4倍。
原理图如上,一个小周期内AB两相分别各有一个上升沿和下降沿,只需要在AB两相的每个上升沿、下降沿进行采集,这样就实现了四倍频技术。
即如果编码器分辨率为p,则现在编码器转动一圈就可以采集到4p个脉冲。
以上信息仅供参考,如需了解更多信息,建议咨询专业人士。
编码器测速原理

编码器测速原理编码器是一种用于测量旋转速度和位置的设备,它可以将机械运动转换为电信号,从而实现对运动状态的监测和控制。
编码器测速原理是指通过编码器获取到的信号来计算出物体的速度,从而实现对物体运动状态的监测和控制。
在工业自动化控制系统中,编码器被广泛应用于各种设备和机械的运动控制中,如机床、机器人、电机等。
编码器的测速原理主要是基于编码器的工作原理和信号输出来实现的。
编码器通常由光电传感器和编码盘组成,当物体运动时,编码盘上的光栅或编码孔会随着物体的运动而产生变化,光电传感器会检测这些变化,并将其转换成电信号输出。
根据这些电信号,我们可以计算出物体的速度。
编码器的测速原理可以分为两种类型,增量式编码器和绝对式编码器。
增量式编码器通过检测编码盘上的脉冲数来计算物体的速度,它的原理是根据脉冲信号的频率和方向来确定物体的运动状态。
而绝对式编码器则可以直接输出物体的位置信息,它的原理是通过编码盘上的编码规律来确定物体的位置,从而实现对物体位置和速度的测量。
在实际应用中,编码器的测速原理可以通过信号处理和计算来实现对物体速度的准确测量。
通过对编码器输出信号的采集和处理,我们可以得到物体的运动状态,从而实现对物体的精确控制和监测。
同时,编码器的测速原理还可以应用于各种工业领域,如自动化生产线、机器人控制、电机调速等方面。
总的来说,编码器的测速原理是基于编码器的工作原理和信号输出来实现的,通过对编码器输出信号的采集和处理,我们可以实现对物体速度的准确测量,从而实现对物体运动状态的监测和控制。
在工业自动化控制系统中,编码器的测速原理具有重要的应用价值,可以帮助我们实现对各种设备和机械的精确控制和监测。
编码器测速原理

编码器测速原理编码器是一种用于測量物体位置、速度和方向的机械设备,在许多工业控制和自动化系统中广泛使用。
它通常由一个旋转部分和一个静止部分组成,旋转部分通过一系列脉冲信号将位置、方向和速度信息传输给控制系统。
编码器测速是其中一种常见的应用场景,通常用于掌握旋转部分的转速,从而实时控制机器的运行状态。
编码器测速的主要原理是通过检测编码器输出脉冲来计算旋转部分的速度。
编码器脉冲通信包括两个主要方面:脉冲频率和脉冲计数。
脉冲频率指的是编码器输出的脉冲数目,而单位时间内脉冲数目的变化就是编码器测量的速度。
脉冲计数指的是计算单位时间内脉冲数目,也就是用于计算速度的基础数据。
在使用编码器测速时,需要确定脉冲计数和单位时间的时间间隔,通常采用微秒或者毫秒为单位。
编码器测速可分为两种主要类型:增量式和绝对式。
增量式编码器是最常用的编码器类型之一,其原理是通过对每一次旋转的增量量进行计量,解码出速度和方向信息。
增量式编码器最大的特点是精度高,使用方便,但由于它基于计数和检测,因此需要进行定期检验并进行校准。
绝对式编码器则具有更高的准确度和精度,因为它可以确定在给定时间内旋转部分的位置,而不仅仅是速度和方向。
绝对式编码器通常包含多个单独的轨道(Track),每一个轨道上有一个独特的编码器序列,可以解析出每一个轨道的位置信息,从而确定旋转部分的位置。
除了基本的增量式和绝对式编码器外,还有一些高级编码器类型,例如线性编码器和旋转/线性编码器。
线性编码器可以用于测量直线移动的物体的位置和速度,其原理与旋转编码器类似。
旋转/线性编码器是一种可以用于同时测量转速和直线运动的编码器类型,其原理是将一个旋转式编码器放置在平移运动的轨道上,从而可以同时检测旋转和移动,并提供位置、速度和方向信息。
在使用编码器测速时,需要注意一些常见问题。
编码器信号的稳定性需要得到保证,可以采用较高的输出频率以提高测量精度。
编码器轴运动的摩擦、惯性和不明确的运动模式都可能对测量结果产生影响。
编码电机测速原理
编码电机测速原理
编码电机测速原理是利用编码器来测量电机的转速。
编码器由光电开关和色轮组成。
当电机转动时,色轮上的凸起与光电开关交替遮挡光线,产生一系列的脉冲信号。
编码器根据脉冲信号的数量和频率计算电机的转速。
脉冲信号的数量与色轮上凸起的数量成比例,频率与电机转速成正比。
测速原理的具体步骤如下:
1. 编码器根据凸起的数量和间隙生成脉冲信号。
2. 通过计数器记录脉冲信号的数量。
3. 根据脉冲信号的数量和测量时间计算电机的转速。
4. 更新转速值,以便实时监测电机的运行状态。
编码电机测速原理的优点是精度高,响应速度快。
它可以实时监测电机的转速并进行反馈控制,使得电机的运行更加稳定和精确。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
这是 AB 两相的时序图,我们可以看到 AB 两相相位上相差了 90 度,本来 一个脉冲是 4 个 phase,而且用 arduino 计算是读取的某一个状态的变化。所以 4 个 phase 用一相的话我们只能读取 1 个脉冲。但是如果我们把两相结合起来的话 在 4 个 phase 中就有 4 个状态的变化,也就是说如果结合两相我们读取的数值就 是一相得 4 倍。转速=脉冲数/(4x374xt)。这就是所谓的软件 4 倍频功能。通过 读取更多的数值来减少误差。 2 相关代码
valA=valB=0;//清零储存脉冲数的变量 } /***********************************子函数程序**********************************/ void go(int a) {
digitalWrite(AIN1,HIGH); digitalWrite(AIN2,LOW); analogWrite(PWMA,a); } void back(int b) { digitalWrite(AIN1,LOW); digitalWrite(AIN2,HIGH); analogWrite(PWMA,b); } void stay() { digitalWrite(AIN1,HIGH); digitalWrite(AIN2,HIGH); } [/kenrobot_code] [kenrobot_code]/** * 日期: 2017/02/28 * 作者: 呆萌阿宝 * 描述: 我觉得 loop 那应该可以改一下但是我没办法实验希望大家帮我看看行不行 */
例如带霍尔编码器的直流电机 25GA370 的部分参数如下:
裸电机转速 12V 12000RPM 减速比:34:1,减速后冲每圈,可以通过单片 机 4 倍频至 1496 脉冲。
编码器如果转一圈呢是 11 个脉冲。但是电机外有个减速器,而且减速比是 34:1,那么就是电机输出轴转 1 圈,输入轴就要转 34 圈。即电机输出轴转 1 圈, 编码器就要输出 11x34=374 个脉冲。至于下面的四倍频我等会介绍。那么就是如 果我们在单位时间 t 内测出一相有 n 个脉冲,那么转速=n/(374xt)。
旋转编码器是一种光电式旋转测量装置,它将被测的角位移直接转换成数字 信号(高速脉冲信号)。编码器如以信号原理来分,有增量型编码器,绝对型编 码器。我们通常用的是增量型编码器,不同型号的旋转编码器,其输出脉冲的相 数也不同,有的旋转编码器输出 A、B、Z 三相脉冲,有的只有 A、B 相两相, 最简单的只有 A 相。
单相联接,用于单方向计数,单方向测速。 A.B 两相联接,用于正反向计数、判断正反向和测速。 A、B、Z 三相联接,用于带参考位修正的位置测量。 1.3 测速原理 当电机转一圈之后就会输出相应的脉冲设为 a,所以我们如果能计算单位时 间里的总脉冲数设为 x,那么 x/a 就是单位时间内转的圈数,即转速。所以我们 如果我们想测电机的速度,只需要计算单位时间内的脉冲数,就可以计算转速了。
if(digitalRead(AM1)==HIGH && flagA==0) {
valA++; flagA=1; } if(digitalRead(AM1)==LOW && flagA==1) { valA++; flagA=0; } if(digitalRead(BM1)==HIGH && flagB==0) { valB++; flagB=1; } if(digitalRead(BM1)==LOW && flagB==1) { valB++; flagB=0; } newtime=millis(); }//计算 AB 两相的脉冲数 n=(valA+valB)/(1.496*d_time);//计算转速 Serial.print(n); Serial.println("rad/s");//输出转速数值
电机编码器测速
下面这篇文章将会告诉你怎么使用 Arduino 读取外界的数字信号,
编码器的一些介绍,还有听起来比较唬人的 4 倍频的揭秘。
1 编码器的介绍 1.1 编码器概述
编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以 通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号, 前者称为码盘,后者称为码尺。(对于电机测速来说应该需要将角位移转变为电 信号,所以应该是码盘。)按照工作原理编码器可分为增量式和绝对式两类。增 量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲, 用脉冲的个数表示位移的大小。(淘宝上搜“带编码器的电机”大多是这种类型的 编码器)绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与 测量的起始和终止位置有 * 日期: 2017/02/28 * 作者: 呆萌阿宝 * 描述: 电机测速 */ const int d_time=100;//设定单位时间 int flagA=0; int flagB=0;//标志位设定 int AM1=2; int BM1=3;//A 相 B 相输入引脚的定义 int AIN1=7; int AIN2=8; int PWMA=9;//AIN1、2 和 PWMA 是电机输出引脚的定义 int valA=0; int valB=0;//用来储存 A 相 B 相记录的脉冲数 double n;//存储转速的变量 unsigned long times;
unsigned long newtime;//时间变量 void go(int g); void back(int b); void stay();//电机子函数申明 void setup() {
Serial.begin(9600);//串口初始化 pinMode(AIN1,OUTPUT); pinMode(AIN2,OUTPUT); pinMode(PWMA,OUTPUT);//AIN1、2 和 PWMA 引脚的输出方式 pinMode(AM1,INPUT); pinMode(BM1,INPUT);//AM1、BM2 引脚的输入方式 } void loop() { go(255);//调用 go()子函数 newtime=times=millis(); while((newtime-times)<d_time) {