声发射源的定位方法
曲面和三维结构的声发射源定位方法

A B = R P- 2arccos 由式 ( 1) 和( 2 ) 解得弧长为
( 2)
A B = R arccos[ sin B1 sin B2 cos ( A 1- A 2) + cos B1 cos B2 ] ( 3) 当判断出一个声源 ( 设为 P ) 来自球面上的一个 三角形 ( 设为 v A BC ) 内部 , 设声源 P 到达 A 和 B 点的时间差为 $t 1 , 到达 C 与 A 点的时间差为 $ t 2 , 声波在球面上的传播速度为 V , 声源与 A 点的距离 为 L , 则声源位置由下面三个方程决定 PA = L PB = L + V $ t 1 PC = L + V $ t 2 把式 ( 3) 代入 ( 4) 得出计算方程 sin B2 sin Bcos ( A- A 2 ) + cos B 2 cos BL + $t 1 @ V = 0 R sin B1 sin Bcos ( A- A 1 ) + cos B 1 cos Bcos L cos R = 0 sin B3 sin Bcos ( A- A 3 ) + cos B 3 cos BL + $t 2 @ V = 0 R 上述方程为三元非线性方程的超越方程组, 使 cos 用解析法很难求解。如果需要声发射系统实时地计 算出声源位置, 就要选择合适的数值解法。非线性 方程组的数值解法很多, 牛顿迭代法有较快的收敛 速度和很好的稳定性。其基本原理是 x k+ 1 = x k - F c( x k ) - 1 F( x k ) 式中 x
( 4)
( 5)
) ) ) 第 k + 1 次迭代的结果矩阵 x ) ) ) 第 k 次迭代结果的矩阵
声发射源的定位方法
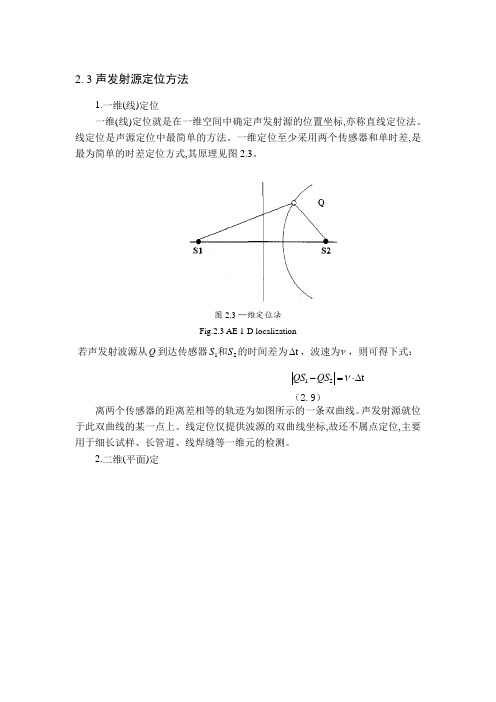
2. 3声发射源定位方法1.一维(线)定位一维(线)定位就是在一维空间中确定声发射源的位置坐标,亦称直线定位法。
线定位是声源定位中最简单的方法。
一维定位至少采用两个传感器和单时差,是最为简单的时差定位方式,其原理见图2.3。
图2.3 —维定位法Fig.2.3 AE 1-D localization 若声发射波源从Q 到达传感器21S S 和的时间差为t ∆,波速为ν,则可得下式: t 21∆⋅=-νQS QS(2.9)离两个传感器的距离差相等的轨迹为如图所示的一条双曲线。
声发射源就位于此双曲线的某一点上。
线定位仅提供波源的双曲线坐标,故还不属点定位,主要用于细长试样、长管道、线焊缝等一维元的检测。
2.二维(平面)定图2.4 二维(平面)定位法Fig.2.4 AE 2-D localization二维定位至少需要三个传感器和两组时差,但为得到单一解一般需要四个传感器三组时差。
传感器阵列可任意选择,但为运算简便,常釆用简单阵列形式,如三角形、方形、菱形等。
近年来,任意三角形阵列及连续多阵列方式也得到应用。
就原理而言,波源的位置均为两组或三组双曲线的交点所确定。
由四个传感器构成的菱形阵列平面定位原理见图2.4。
若由传感器31S S 和间的时差X t ∆所得双曲线为1,由传感器42S S 和间的时Y t ∆所得双曲线为2,波源Q 离传感器31S S 和,42S S 和的距离分别为Y X L L 和,波速为ν,两组传感器间距分别为a 和b ,那么,波源就位于两条双曲线的交点()Y X Q ,上,其坐标可由下面方程求出: ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛122b 2122a 22222222222Y Y X X L X L Y L Y L X (2.10)平面定位除了上述菱形定位方式外,常见的还有三角形定位、四边形定位、传感器任意布局定位等。
声发射源的定位方法

声发射源的定位方法1.声源叠加法:声源叠加法利用多个声源同时发出声音,在接收端通过分析各个声源的声音特征来确定声源的位置。
这种方法适用于声源分布均匀、声音特征能够区分的情况。
对于每一个声源,可以通过测量声音的到达时间和幅度来确定其与接收端的距离。
2.时差测量法:时差测量法利用声音在传播过程中的传播速度来测量声源与接收端的距离。
当声音从声源发出后,经过一段时间才能到达接收端,通过测量声音的传播时间差就可以确定声源的位置。
常用的时差测量方法包括互相关法、波束形成法等。
-互相关法:将接收到的声音信号与参考信号做互相关运算,根据互相关函数的峰值位置和幅度来确定声源的位置。
-波束形成法:利用具有多个接收单元的阵列或麦克风进行声音接收,并根据接收到的信号进行波束形成,通过测量到达时间差来确定声源的位置。
3.幅度比测量法:幅度比测量法利用声音在传播过程中的能量损失来测量声源与接收端的距离。
声音在传播过程中会受到空气衰减、散射等因素的影响,幅度会随距离的增加而减小。
通过测量接收到的声音幅度比来确定声源的位置。
-三点法:利用三个接收器测量到的声音幅度比来确定声源的位置。
通过测量三个接收器之间的幅度比,可以求解出声源的位置。
4.高斯法:高斯法采用统计学方法,通过分析接收到的声音信号的统计特性来确定声源的位置。
该方法需要进行大量的声音信号采集和处理,通过建立声音信号的统计模型来推测声源的位置。
综上所述,声发射源的定位方法包括声源叠加法、时差测量法、幅度比测量法和高斯法等。
这些方法可以单独或者结合使用,根据实际应用场景和传感器条件的不同,选择合适的定位方法来实现声发射源的定位。
pac声发射试验定位的方法
pac声发射试验定位的方法?
答:PAC声发射试验定位的方法包括以下步骤:
1. 在待测物体上布置多个传感器,这些传感器用于接收声发射信号。
2. 对传感器接收到的声发射信号进行放大和滤波处理,以提高信号的信噪比。
3. 将处理后的声发射信号转换为数字信号,并进行数据采集和存储。
4. 利用时差定位算法对声发射源进行定位。
时差定位算法是通过计算声发射信号到达不同传感器的时间差,结合已知的传感器布置位置,利用数学方法确定声发射源的位置。
5. 根据定位结果,对物体进行缺陷或损伤评估。
如果声发射源位于物体内部,且定位结果与已知的物体结构相符合,则可以判断物体存在内部缺陷或损伤。
需要注意的是,PAC声发射试验定位方法的精度和可靠性受到多种因素的影响,如传感器布置、信号处理算法、物体材料特性等。
因此,在实际应用中,需要根据具体情况对试验方法和参数进行优化和调整,以提高定位精度和可靠性。
物理实验声音定位的原理
物理实验声音定位的原理声音定位是通过测量声音到达不同位置的时间差来确定声源的位置。
在物理实验中,常用的声音定位方法有三角定位法和时间差定位法。
三角定位法是通过测量声音到达不同位置的角度差来确定声源的位置。
这种方法利用了声音在空气中传播的特性,即声音在传播过程中会发生折射和反射。
当声源发出声音时,声波会以球面波的形式向四面八方传播,当声波遇到障碍物时,会发生折射和反射,从而改变声波的传播方向。
通过测量声音到达不同位置的角度差,可以计算出声源的位置。
在三角定位法中,通常需要使用至少三个接收器来测量声音到达不同位置的角度差。
这些接收器可以是麦克风或其他声音传感器。
当声源发出声音时,接收器会接收到声波,并记录下声音到达的时间。
通过比较不同接收器接收到声音的时间差,可以计算出声音到达不同位置的角度差。
根据声音传播的特性,可以利用三角函数关系计算出声源的位置。
时间差定位法是通过测量声音到达不同位置的时间差来确定声源的位置。
这种方法利用了声音在空气中传播的速度是已知的特性。
声音在空气中的传播速度约为343米/秒。
当声源发出声音时,声波会以球面波的形式向四面八方传播,当声波到达不同位置时,会有不同的传播时间。
通过测量声音到达不同位置的时间差,可以计算出声源的位置。
在时间差定位法中,通常需要使用至少两个接收器来测量声音到达不同位置的时间差。
这些接收器可以是麦克风或其他声音传感器。
当声源发出声音时,接收器会接收到声波,并记录下声音到达的时间。
通过比较不同接收器接收到声音的时间差,可以计算出声音到达不同位置的时间差。
根据声音在空气中的传播速度,可以利用速度等于距离除以时间的关系计算出声源的位置。
在实际的声音定位实验中,还需要考虑一些误差因素。
例如,声音在传播过程中会受到空气湿度、温度和压力等因素的影响,这些因素会影响声音的传播速度。
此外,声音在传播过程中还会受到衍射、干扰和多次反射等影响,这些因素会导致声音的传播路径发生变化,从而影响声音定位的准确性。
线性定位、平面定位和三维定位的操作步骤

3、定时参数设置
PDT的正确设置将确保正确鉴别信号峰值的上升时间 及峰值幅度的检测。HDT 的正确设置将确保结构中的一个 AE 信号反映到系统中的是一个且仅为一个hit。HLT 的正确 设置将避免同一个信号北采集多次。对于各种材料,以上 三个参数的推荐值如下: 单位:微秒 复合材料 金属小试件 高衰减金属构件 低衰减金属构件 水
3、定时参数设置
PDT的正确设置将确保正确鉴别信号峰值的上升时间 及峰值幅度的检测。HDT 的正确设置将确保结构中的一个 AE 信号反映到系统中的是一个且仅为一个hit。HLT 的正确 设置将避免同一个信号北采集多次。对于各种材料,以上 三个参数的推荐值如下: 单位:微秒 复合材料 金属小试件 高衰减金属构件 低衰减金属构件 水
(5)事件定义值:此项选择为两传感器的间距。 (6)事件闭锁值:此项选择为事件定义值的 1.5--2倍即可。 (7)过定义值:此项选择为事件定义值的 1/10即可。 (8)定时策略、撞击/事件最小&最大值、最 大反复这三个选项根据定位类型选择默认值 即可。
6、定位显示
通用页设置完毕后,点击该页面下方的 定位显示,则会弹出如下对话框。
涂抹适量的耦合剂
2、AE通道设置
(1)打开AEwin软件后,在“文件”下拉菜单中新建一个项 目文件,将该项目文件存在某个位置。选择采集设置菜单 中的硬件设置或按F2,通道设置对话框则会弹出,如下图 所示。
(1)首先选择实验过程中所选用的通道,只需 勾选通道前的选择框即可; (2)门槛类型选择固定门槛,浮动门槛多用于 背景噪音复杂的环境中,门槛值一般选择为 35db-45db; (3)内部增益不用选择,前放增益的选择必须 与前置放大器一致,否则会出错,一般选择 40db。若探头是前置一体化的,则只能选择 40db。 (4)模拟滤波器主要是根据传感器来定的,以 下是常用传感器的推荐值:R3a或R6a(20100khz),R15a(100-400khz),Nano 30 (100-400khz)
线性定位、平面定位和三维定位的操作步骤
涂抹适量的耦合剂
断铅实验确定探头耦合质量
2、AE通道设置
(1)打开AEwin软件后,在“文件”下拉菜单 中新建一个项目文件,将该项目文件存在某 个位置。选择采集设置菜单中的硬件设置或 按F2,通道设置对话框则会弹出,如下图所 示。
(1)首先选择实验过程中所选用的通道,只 需单击通道前的选择框即可; (2)门槛类型选择固定门槛,浮动门槛用于 背景噪音复杂的环境中,门槛值一般选择为 35db-45db; (3)内部增益不用选择,前放增益的选择必 须与前置放大器一致,否则会出错,一般选 择40db。若探头是前置一体化的,则只能选 择40db。 (4)模拟滤波器主要是根据传感器类型来确 定的。常用探头推荐滤波器如下: R3a或R6a (20-100khz),R15a(100-400khz),Nano 30(100-400khz)
(3)在定位图设置中需注意,首先要选择定 位组,然后根据定位组选择所对应的传感器 ,并且在输入数据选项中选择事件。
(4)定位图的图形设置中,选择二维散点图Y 轴显示选项为Y位置,范围选-20--620,固定。 X轴显示选项为X位置,范围为-20—620,固 定。
平面定位范例可参考定位设置的附件。
(5)若实验过程需采集波形,必须勾选AE通 道设置框下方的“全局波形允许”。采样率 为这是以每秒为基础的数据采集板采集波形 的速率。采样率为1 MSPS的意思是每微秒一 个采集样本,采样率越高,波形越真实。为 保证采集波形不失真,采样率应高于传感器 中心频率的两倍,一般取5-10倍;预触发是 指信号超过门槛之前的那部分,单位为微秒, 预触发的长度一般小于整个波形长度的四分 之一
6、定位显示
通用页设置完毕后,点击该页面下方的 定位显示,则会弹出如下对话框。
声发射检测信号分析及源定位方法研究

㊀2021年㊀第5期仪表技术与传感器Instrument㊀Technique㊀and㊀Sensor2021㊀No.5㊀基金项目:国家重点研发计划项目(2018YFF0214703)收稿日期:2020-06-04声发射检测信号分析及源定位方法研究童国炜,周循道,黄林轶,陈超英,徐华伟,杨㊀林(工业和信息化部电子第五研究所,智能产品质量评价与可靠性保障技术工业和信息化部重点实验室,广东广州㊀510610)㊀㊀摘要:文中设计了一种可弱化噪声干扰和频散效应的定位算法,采用变分模态分解方法将声发射信号分解为若干个不同频带宽度的模态函数,并通过合并含有主要能量成分的模态函数获得声发射源信号的主要成分,最后采用互相关分析方法确定声源位置㊂实验结果表明,文中所提算法对声发射源定位是有效的㊁精确的,在一维和二维AE源定位实验中,文中所提方法综合定位误差在5%以内㊂关键词:无损探伤;声发射;定位;变分模态分解;互相关分析中图分类号:TP277㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1002-1841(2021)05-0096-05AcousticEmissionSignalAnalysisandSourceLocalizationMethodResearchTONGGuo⁃wei,ZHOUXun⁃dao,HUANGLin⁃yi,CHENChao⁃ying,XUHua⁃wei,YANGLin(The5thElectronicResearchInstituteofMinistryofIndustryandInformationTechnology,KeyLaboratoryofMIITforIntelligentProductsTestingandReliability,Guangzhou510610,China)Abstract:Thispaperdesignedalocalizationalgorithmthatcanweakennoiseinterferenceanddispersionphenomenon.Thevariationalmodaldecompositionmethodwasusedtodecomposetheacousticemissionsignalintoseveralmodalfunctionswithdif⁃ferentfrequencybandwidths.Themaincomponentsofthesignalwereobtainedbycombiningthemodalfunctionswhichcontainthemainenergycomponents,andfinallythecross⁃correlationanalysiswasusedtodeterminethesourcelocation.Experimentalresultsshowthatthealgorithmproposedinthispaperiseffectiveandaccurateforthesourcelocation,thecomprehensivelocationerroroftheproposedmethodislessthan5%intheoneandtwodimensionalacousticemissionsourcelocalizationexperiments.Keywords:nondestructivetesting;acousticemission;location;variationalmodaldecomposition;crosscorrelation0㊀引言声发射(acousticemission,AE)是一种由于裂痕扩展㊁摩擦㊁微动㊁冲击而产生的物理现象,通过定位AE源可实时监测㊁评估裂痕和损伤的状态,能够达到预防和控制潜在危险及确保监控对象安全运行的功能㊂由于其具有快速㊁无损㊁低能耗等特点,现已广泛应用于地震㊁爆炸㊁航空㊁军事㊁桥梁㊁隧道㊁矿山和能源等领域[1-2]㊂1912年,Geiger最先提出了一种基于地震波到达时间确定震源的方法[3]㊂受其启发,学术界涌现出了众多定位方法,并广泛地应用于工程领域中㊂针对现有AE源定位算法不能始终获得多层圆柱介质精确结果的问题,作者提出了一种考虑折射的AE源定位方法㊂实验结果表明,新方法可以在双层圆柱表面介质中获得准确的声发射源位置[4]㊂作者针对固定的弹性波速度和结构几何不规则性等问题,提出了一种没有预先测速的A∗定位方法㊂实验结果表明对于不规则的二维复杂结构,其定位精度得到了显著提高[5]㊂上述方法推动了AE定位技术的发展,但是这些方法在设计时未考虑到在工程实际应用过程中存在的环境测量噪声,同时也未考虑在非理想㊁非均匀㊁非完全弹性介质中传播的波会发生的频散现象,上述问题均会降低定位算法的准确性㊁可靠性,或者导致定位到现实中不存在的源㊂研究表明,通过信号分解方法将原始AE源信号按频率特征进行分解,并选择性地选取用于计算定位信息信号的验算策略可有效地弱化噪声和频散现象的不利影响㊂变分模态分解(variationalmodaldecomposition,VMD)方法[6]可通过非迭代的方式实现按最小估计带宽对信号的分解,借助信号能量分析方法可选择出用于计算定位信息的分量信号㊂因此,本文提出了一种融合了VMD方法和互相关分析方法的AE源定位算法㊂VMD方法将AE信号分解为若干个具有最小估计带宽的分量信号,能量分析方法挑选出信号的主要成分,互相关分析获得2个AE传感器之间的时间差,进而计算得出声源距离AE传感器的距离信息,实现了对声源准确㊁可靠的定位㊂㊀㊀㊀㊀㊀第5期童国炜等:声发射检测信号分析及源定位方法研究97㊀㊀1㊀声发射及定位原理1.1㊀声发射如图1所示,AE系统包括3个部分:AE传感器㊁信号放大器和信号分析系统㊂AE系统在工作过程中,声源产生的瞬时弹性波以工程材料作为介质传播到材料表面,然后与材料表面放置的AE传感器进行耦合,通过压电效应将声波转换为电信号,最后经放大㊁采集可得到数字化信号,并采用适当的分析方法得到AE源的信息㊂图1㊀AE系统架构图1.2㊀定位当测量材料产生连续或间断的AE信号时,通过采集多个AE传感器中的信号,可分析出声发射源的位置及其他信息㊂图2以一维测量模型为例演示了定位算法㊂图2㊀AE一维定位模型一维模型一般存在2个或2个以上AE传感器[7],图2仅示意存在2个传感器的情况㊂设声发射源所产生的信号分别经过t1和t2时间达到传感器1和2,声音在材料中传播速度为v,可得如下关系:d=D-vΔt2Δt=t2-t1ìîíïïï(1)式中:d为AE源到传感器1的距离,m;D为传感器1㊁传感器2的距离,m;Δt为AE源到达传感器1㊁传感器2的时间差,s㊂当已知声波的传播速度v和Δt时,即可得到d,从而确定AE源的位置信息㊂本文采用Nielsen⁃Hsu实验确定值为3446m/s㊂采用互相关分析估计时延Δt,该方法计算速度快㊁运行损耗小㊂假设两侧传感器采集的AE信号分别为x(t)和y(t),则对应的数学模型如下所示:x(t)=s(t)+n1(t)y(t)=as(t-Δt)+n2(t){(2)式中:s(t)为AE源的信号;a为衰减参数;n1(t),n2(t)为环境噪声㊂在某一时间段T内,互相关系数为R(xy(Δt)=1TʏT0as(t)s(t-Δt)dt(3)观察式(3)可知,2个声发射信号是延迟时间Δt的函数,因此互相关系数分布的峰值点表示2个信号最大相关的位置,同时也代表了信号传播时差㊂基于一维定位模型理论,二维定位模型通过布置于平面内3个或3个以上传感器所获取的信息对AE源进行定位[8]㊂当获得1对传感器信息后,可在平面内获得1条双曲线函数,如图3(a)所示㊂当获得2对传感器信息后,即可在平面内确定2个声源点,如图3(b)所示㊂图3㊀二维定位模型假设P点为声发射源,传播到传感器1和传感器2的时间差和距离有如下关系:PF1-PF2=vΔt(4)当采集3个AE传感器的信号后,声发射源的位置会处于2条双曲线上的交叉点上㊂因此,需采集3个及3个以上AE传感器的信号才可以确定二维平面内声发射源的位置,如图3(b)所示,P1和P2为2条双曲线的交点,声发射源的位置在其中之一,选取时根据实际情况进行选择㊂1.3㊀信号预处理由于环境噪声和频散效应对声波的影响,直接使㊀㊀㊀㊀㊀98㊀InstrumentTechniqueandSensorMay.2021㊀用采集到的原始AE信号计算互相关系数,并查找判断延迟时间,所获得的结果会存在一定偏差㊂因此,选择合适的方法对原始信号进行有效的筛选㊁分析㊁优化是提高定位精确性和可靠性的关键㊂在信号分析领域中,VMD是基于信号时频特征的分解方法,通过非迭代的方式将信号分解为若干个拥有不同带宽的模态函数(modefunction,MF)㊂该方法认为每个MF分量有且只有一种频率成分构成,分解过程是寻求若干个MF,同时要保障每个MF所包含的带宽最小[6]㊂对于序列x(t),VMD可分解出K个MFuk(t),k=1,2, ,K:x(t)=ðKk=1uk(t)(5)MFuk(t)定义为uk(t)=Ak(t)cos[ϕk(t)](6)式中:Ak(t)为uk(t)的幅值;ϕk(t)为uk(t)的相位㊂对uk(t)使用Hilbert变换,可得解析信号及其单边谱:[σ(t)+jπt]uk(t)(7)通过指数调谐,即乘以e-jwkt,将估计uk(t)的中心频率移到基频附近:{[σ(t)+jπt]uk(t)}e-jwkt(8)式中wk为中心频率,wk=ϕᶄk(t)㊂带宽B[uk(t)]可通过解调信号的H1高斯平滑度进行估计:B[uk(t)]=∂t[σ(t)+jπt)uk(t)]e-jwkt22(9)最终,得到一个变分优化问题:minuk,wk{ðKk=1∂t[(σ(t)+jπt)uk(t)]e-jwkt22}s.t.ðKk=1uk(t)=x(t)(10)原始文献采用交替迭代乘子法进行求解㊂观察可知,VMD方法采用优化策略一次性获得所有分量,而且各MF的中心频率和带宽可被自适应计算出的同时,实现了对序列的频域剖析和MF分离㊂2㊀实验研究本文设计了AE定位测试系统,由3个AE传感器㊁3个前置放大器㊁1个8通道的数据采集卡㊁1个PC机,1个镀锌钢板组成㊂镀锌钢板长㊁宽为500mm,厚度为2mm,通过敲击产生AE源㊂实验模型如图4所示㊂镀锌钢板固定于桌面,3个AE传感器通过磁吸附的方法固定于镀锌钢板表面,AE传感器通过前置放大器与数据采集卡相连㊂图4㊀实验模型根据文献报道,敲击震动信号的峰值频率较低,因此,本文选用窄带低频的AE传感器采集声信号,相关参数列于表1㊂表1㊀传感器参数表谐振频率/kHz带宽频率/kHz灵敏度/dB尺寸/mm4020 11080Φ17ˑ16㊀㊀设计了针对一维和二维定位模型的实验,每种实验情况的传感器摆放方式和敲击位置又设定了不同的组合,通过组合可得4种实验情况,图5展示了传感器和敲击位置的具体坐标,表2列举了4个测试案例㊂㊀图5㊀实验布置图表2㊀实验分类模型类型敲击位置案例1一维敲击位置1案例2一维敲击位置2案例3二维敲击位置1案例4二维敲击位置23㊀实验结果分析本小节分别对4个案例进行实验测量,并采用本文所提方法确定AE源位置,对其有效性㊁精确性㊁可靠性进行验证㊂3.1㊀信号分析以案例1为例,图6为AE传感器1㊁传感器2接收到的声信号,相应的VMD分解结果如图7所示㊂㊀㊀㊀㊀㊀第5期童国炜等:声发射检测信号分析及源定位方法研究99㊀㊀图6㊀案例1信号在案例1中,原始信号被分为4个模态函数,在时域波形中,MF的幅值会逐渐减小,同时频带会升高㊂因此,具有较低信号幅值和较高频率的MF分量可以被认为是噪声干扰而忽略不计㊂同时,每个MF的能量EIMFi和相应的能量比RIMF由下式进行量化:EIMFi=1NðNm=1xi(m)2(11)(a)传感器1信号的MF图㊀㊀㊀(b)传感器1信号MF的频域图(c)传感器2信号的MF图㊀㊀㊀(d)传感器2信号MF的频域图图7㊀分解结果RIMF=EIMFiðXi=1EIMFiˑ100%(12)式中xi(m)为第i个MF中第m个时间序列点的数值㊂图8显示了案例1中2个AE传感器接收到声信号MF的能量比㊂如图8所示,前3个MF几乎包含整个信号能量的98%,可以完全反映原始信号的主要信息㊂因此,MF1㊁MF2㊁MF3可用于重建AE信号的主要成分,而其他能量较低的成分可以忽略不计㊂3.2㊀一维定位模型合并2个AE传感器信号前3个MF,由式(3)计算2个信号的互相关系数,并从峰值处获得时间差,通过式(1)计算出声发射源的位置㊂案例1-2的相关系数曲线如图9所示,定位结果列于表3㊂表3㊀一维模型声发射源定位结果案例d1/mmD/mmΔt/ms式(1)结果/mm绝对误差/mm相对误差/%1803400.05182.512.513.132240340-0.088231.418.593.58根据实验结果可知,本文设计的定位算法能够实现AE源的定位,且具有较高的定位精度,在案例1,2的实验中,相对误差可达到3.13%,3.58%,满足实际应用要求㊂3.3㊀二维定位模型基于一维定位模型的计算方法,采用2对AE传感器的数据,通过双曲线方法可实现二维平面内的AE源定位,结果如表4所示(坐标原点在图5的左下角)㊂通过2组二维平面AE源定位实验,可验证本文所提方法对二维平面AE源定位是有效的㊁精确的,实际计算结果的横纵坐标定位误差在5%以内㊂㊀㊀㊀㊀㊀100㊀InstrumentTechniqueandSensorMay.2021㊀(a)传感器1各MF能量比(b)传感器2各MF能量比图8㊀案例1MF能量比(a)案例1相关系数曲线(b)案例2相关系数曲线图9㊀互相关分析曲线表4㊀二维模型声发射源定位结果案例AE传感器位置坐标/mm1号2号3号实际AE源坐标/mm双曲线法计算结果/mm绝对误差/mm相对误差/%3(80,420)(240,460)(420,420)(160,140)(164.4,134.4)(5.4,5.6)(3.3,4.1)4(80,420)(240,460)(420,420)(420,320)(407.4,329.1)(12.6,9.1)(3.1,2.8)4㊀结论为了减小AE源定位过程中测量环境噪声和频散现象对定位结果的干扰,本文研究了VMD方法在AE源定位中的应用方法,通过对原始AE信号按最小带宽进行分解,提取主要能量分量的和,并采用互相关分析确定AE源位置㊂一维和二维AE源定位实验结果表明本文所提方法综合定位误差在5%以内,可实现精确的AE源定位计算,为AE源定位研究提供了一种可行的研究方法㊂参考文献:[1]㊀王清琳,程珩,靳宝全.管网泄漏极性相关法定位研究[J].仪表技术与传感器,2015(7):94-97.[2]㊀BATTIEAG.Acousticemissionprinciplesandinstrumentation[J].JournalofAcousticEmission,1983,2(12):95-128.[3]㊀GEIGERL.Probabilitymethodforthedeterminationofearth⁃quakeepicentersfromarrivaltimeonly[J].Bull.St.Louis.Univ.,1912,8(1):60-71.[4]㊀ZHOUZ,ZHOUJ,CAIX,etal.Acousticemissionsourcelo⁃cationconsideringrefractioninlayeredmediawithcylindricalsurface[J].TransactionsofNonferrousMetalsSo⁃cietyofChina,2020,30(3):789-799.[5]㊀HUQ,DONGL.Acousticemissionsourcelocationandexperi⁃mentalverificationfortwo⁃dimensionalirregularcomplexstruc⁃ture[J].IEEESensorsJournal,2020,20(5):2679-2691.[6]㊀DRAGOMIRETSKIYK,ZOSSOD.Variationalmodedecom⁃position[J].IEEETransactionSignalProcess,2014,62(3):531-544.[7]㊀王少峰,刘朋真,王建国,等.基于小波包熵与Gabor小波变换的管道连续型泄漏源定位[J].仪表技术与传感器,2017(9):98-102.[8]㊀王银玲,李华聪.声发射检测仪多路数据采集模块[J].仪表技术与传感器,2015(6):41-43.作者简介:童国炜(1988 ),工程师,博士,主要从事数值优化㊁逆问题求解㊁人工智能及相关领域问题的模型构建和求解㊂E⁃mail:tongguowei188@163.com通信作者:杨林(1965 ),高级工程师,主要从事检测认证技术研究与管理工作㊂E⁃mail:lynny@ceprei.biz。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2. 3声发射源定位方法
1.一维(线)定位
一维(线)定位就是在一维空间中确定声发射源的位置坐标,亦称直线定位法。
线定位是声源定位中最简单的方法。
一维定位至少采用两个传感器和单时差,是最为简单的时差定位方式,其原理见图2.3。
图2.3 —维定位法
Fig.2.3 AE 1-D localization 若声发射波源从Q 到达传感器21S S 和的时间差为t ∆,波速为ν,则可得下式: t 21∆⋅=-νQS QS
(2.9)
离两个传感器的距离差相等的轨迹为如图所示的一条双曲线。
声发射源就位于此双曲线的某一点上。
线定位仅提供波源的双曲线坐标,故还不属点定位,主要用于细长试样、长管道、线焊缝等一维元的检测。
2.二维(平面)定
图2.4 二维(平面)定位法
Fig.2.4 AE 2-D localization
二维定位至少需要三个传感器和两组时差,但为得到单一解一般需要四个传感器三组时差。
传感器阵列可任意选择,但为运算简便,常釆用简单阵列形式,如三角形、方形、菱形等。
近年来,任意三角形阵列及连续多阵列方式也得到应用。
就原理而言,波源的位置均为两组或三组双曲线的交点所确定。
由四个传感器构成的菱形阵列平面定位原理见图2.4。
若由传感器31S S 和间的时差X t ∆所得双曲线为1,由传感器42S S 和间的时Y t ∆所得双曲线为2,波源Q 离传感器31S S 和,42S S 和的距离分别为Y X L L 和,波速为ν,两组传感器间距分别为a 和b ,那么,波源就位于两条双曲线的交点()Y X Q ,
上,其坐标可由下面方程求出: ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭
⎫ ⎝⎛=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛122b 2122a 222222222
22Y Y X X L X L Y L Y L X (2.10)
平面定位除了上述菱形定位方式外,常见的还有三角形定位、四边形定位、传感器任意布局定位等。
传感器任意布局定位方式是用户在布置声发射传感器时不再受三角形、四边形的限制,而根据对象的实际需要随意布置传感器,而将传感器坐标位置输入计算机来定位。
3.三维(3D)空间定位
对于波速均匀的各向同性材料,声发射信号传播的走时方程为
:
()()()()νt -t z -z y -y x -x i i 2i 2i =++
(2.11)
式中:i x ,i y ,i z ,i t 分别为第i 个传感器的三维坐标和到达时间;x ,y ,
z 为声发射源的三维坐标,t 为信号从声发射源传出的时间,
ν为信号在材料中转播的速度(0〉ν)。
虽然在实际应用中,混凝土材料不是严格的各向同性均匀材料,但是当材料总体上差异不大时一般仍采用均匀各向同性速度模型来近似。
当波速未定时,三维定位的未知量共有5个,分别为x ,y ,z ,t ,ν。
因此理论上只要有5个传感器收到声发射信号就可以进行声发射源的三维定位。
在一般情况下,声发射信号在材料中的传播速度可以由断铅试验来测定,因此最少通过4个空间分布的传感器即可实现三维定位。
声发射源定位的原理非常简单,但是由于到达时间识别不准确、波速不均匀、背景噪声等因素的影响,常常导致定位精度不高。
为解决这一问题,在声发射源定位中,常规的做法是使用尽可能多的传感器建立超定方程组,然后应用最小二乘法求解以消除随机误差的影响。