声发射源线性定位误差研究
声发射源的定位方法
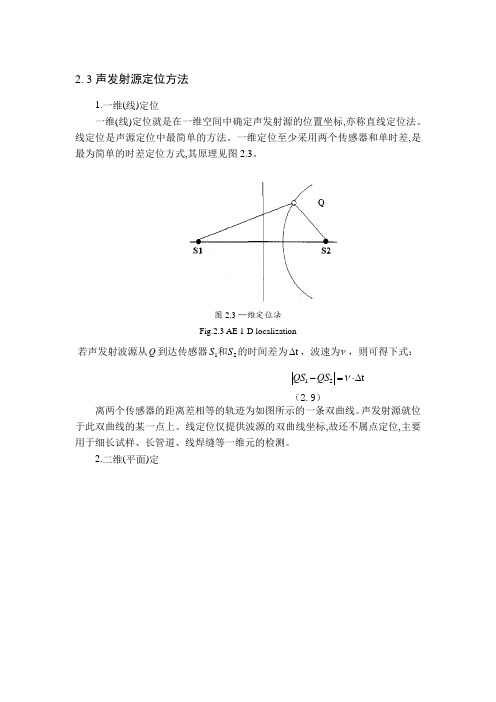
2. 3声发射源定位方法1.一维(线)定位一维(线)定位就是在一维空间中确定声发射源的位置坐标,亦称直线定位法。
线定位是声源定位中最简单的方法。
一维定位至少采用两个传感器和单时差,是最为简单的时差定位方式,其原理见图2.3。
图2.3 —维定位法Fig.2.3 AE 1-D localization 若声发射波源从Q 到达传感器21S S 和的时间差为t ∆,波速为ν,则可得下式: t 21∆⋅=-νQS QS(2.9)离两个传感器的距离差相等的轨迹为如图所示的一条双曲线。
声发射源就位于此双曲线的某一点上。
线定位仅提供波源的双曲线坐标,故还不属点定位,主要用于细长试样、长管道、线焊缝等一维元的检测。
2.二维(平面)定图2.4 二维(平面)定位法Fig.2.4 AE 2-D localization二维定位至少需要三个传感器和两组时差,但为得到单一解一般需要四个传感器三组时差。
传感器阵列可任意选择,但为运算简便,常釆用简单阵列形式,如三角形、方形、菱形等。
近年来,任意三角形阵列及连续多阵列方式也得到应用。
就原理而言,波源的位置均为两组或三组双曲线的交点所确定。
由四个传感器构成的菱形阵列平面定位原理见图2.4。
若由传感器31S S 和间的时差X t ∆所得双曲线为1,由传感器42S S 和间的时Y t ∆所得双曲线为2,波源Q 离传感器31S S 和,42S S 和的距离分别为Y X L L 和,波速为ν,两组传感器间距分别为a 和b ,那么,波源就位于两条双曲线的交点()Y X Q ,上,其坐标可由下面方程求出: ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛122b 2122a 22222222222Y Y X X L X L Y L Y L X (2.10)平面定位除了上述菱形定位方式外,常见的还有三角形定位、四边形定位、传感器任意布局定位等。
声发射源定位技术5
到这两条双曲线的交点 ,也就可以计算出声发射源
的部位 。
2. 3 四个探头阵列的平面定位计算方法
对任意三角形探头阵列平面声发射源定位 ,求
解式 (8) 和 (9) 有时得到双曲线的两个交点 ,即一个
真实的 A E 源和一个伪 A E 源 ,但如采用图 5 所示
的四个探头构成的菱形阵列进行平面定位 ,则只得
区域定位是一种处理速度快 、简便而又粗略的 定位方式 ,主要用于复合材料等由于声发射频度过 高 、传播衰减过大或检测通道数有限而难以采用时 差定位的场合 。
连续声发射信号源定位主要用于带压力的气液 介质泄漏源的定位 。
本文将详细介绍突发型声发射信号时差定位方 法中的一维线定位和二维平面定位技术[5 ] ,其它定 位技术将在后续文章中介绍 。
沈功田等 : 声发射源定位技术
由此可以得到如下系列方程
Δt1 V = r1 - R
(6)
Δt2 V = r2 - R
(7)
R
=
1 2
×Δ t 1
V
D
2 1
+
-
Δ
t
2 1
V
2
D1cos (θ -
θ1)
(8)
R
=
1 2
×Δt
2
V
D
2 2
+
-
Δ
t
2 2
V
2
D2cos (θ3
-
θ)
(9)
式(8) 和 (9) 为两条双曲线方程 ,通过求解就可以找
对于任何一个给定的由三个探头组成的阵列 , 解方程 (8) 和 (9) 可能得到双曲线的两个交点 ,即一 个真实的声发射定位源和一个伪声发射定位源 ,如 图 11 所示 。为了判别两个声发射源的真伪 ,一般采 用增加第四个探头以到达次序来识别 。图 11 中真 实定位源的声发射信号到达次序为 1 ,2 ,3 号探头 , 而伪定位源部位如产生声发射信号的到达次序为 1 ,4 ,3 号探头 。另外 ,如采用诸如图 7 和图 8 的探 头布置阵列对整个结构进行整体监测 ,则可以只考 虑三角阵列内部的定位源 。
声音定位和声源识别算法研究综述

声音定位和声源识别算法研究综述声音定位和声源识别是现代信号处理领域的重要研究方向之一。
随着智能音箱、语音助手等智能设备的普及,声音定位和声源识别技术得到了广泛的应用和关注。
本文将综述声音定位和声源识别算法的研究进展,介绍其应用领域和未来发展趋势。
一、声音定位算法的研究声音定位是指根据接收到的声音信号确定声源的方位角和俯仰角的过程。
声音定位算法主要分为基于时差的方法和基于能量的方法两种。
基于时差的方法利用声音信号在不同麦克风之间传播的时间差来确定声源的方位角。
常用的方法包括互相关法、波束形成法和最小二乘法等。
互相关法通过计算麦克风信号之间的互相关函数来估计时差,进而得到声源的方位角。
波束形成法则是通过对麦克风信号进行加权和相位调节,使得声源方向上的信号增益最大,从而实现声音定位。
最小二乘法则是通过最小化麦克风信号与声源信号之间的误差平方和,来估计声源的方位角。
基于能量的方法则是通过对声音信号的能量进行分析,来确定声源的方位角。
常见的方法包括声音强度法和声音梯度法。
声音强度法通过计算麦克风信号的能量差来确定声源的方位角。
声音梯度法则是通过计算麦克风信号的梯度来确定声源的方位角。
二、声源识别算法的研究声源识别是指根据接收到的声音信号判断声源的种类或身份的过程。
声源识别算法主要分为基于特征提取的方法和基于机器学习的方法两种。
基于特征提取的方法通过对声音信号的频谱、时域特征等进行提取和分析,来判断声源的种类或身份。
常见的特征包括MFCC(Mel Frequency Cepstral Coefficients)、SVM(Support Vector Machine)等。
MFCC是一种常用的声音特征提取方法,它通过将声音信号映射到梅尔频率尺度上,并提取其倒谱系数,从而得到一组具有较好区分能力的特征向量。
SVM则是一种常用的机器学习算法,它通过构建一个最优的超平面来实现声源的分类。
基于机器学习的方法则是通过训练一组声音样本,建立声音模型,并利用该模型对新的声音信号进行分类。
声源定位精度与方法比较分析

声源定位精度与方法比较分析声源定位是通过分析传感器接收到的声音信号来确定声源位置的过程。
声源定位精度和方法选择是声源定位技术中关键的问题。
在这篇文章中,我们将比较分析不同声源定位方法的精度和适用性,以便更好地了解这些方法的优缺点。
首先,我们将讨论几种常见的声源定位方法,包括时间差定位、幅度差定位和交叉相关定位。
时间差定位是通过测量声音信号在不同传感器之间传播的时间差来确定声源位置。
这种方法简单直接,不需要复杂的处理过程。
然而,时间差定位的精度受到传感器之间距离的限制,尤其是在远距离下会受到较大误差。
另外,时间差定位对声音波形的变化敏感,因此需要保持较高的信噪比。
幅度差定位是通过测量声音信号在不同传感器之间的幅度差来确定声源位置。
这种方法相对于时间差定位对传感器间距离的要求较小。
它在短距离定位时表现良好,但在远距离下容易受到噪声的影响,精度会下降。
交叉相关定位是通过计算不同传感器接收到的声音信号互相关来确定声源位置。
这种方法可以减小噪声的影响,具有较好的定位精度。
但是,交叉相关定位需要对多个信号进行处理,计算复杂度较高。
此外,它对传感器之间的同步性要求较高,需要高精度的时钟同步。
除了上述方法外,还有一些新兴的声源定位方法被提出,如基于阵列信号处理的波束形成和机器学习方法。
波束形成是一种通过加权和合成多个传感器接收到的信号来增强特定方向上的声源信号的方法。
它可以有效地抑制噪声和干扰,提高定位精度。
由于波束形成需要利用传感器阵列的空间滤波效果,因此对声源方向的估计精确度较高。
机器学习方法则是利用机器学习算法对声音信号进行处理和分析,从而实现声源定位。
通过训练模型,可以根据声音信号的特征来预测声源位置。
这种方法可以适应不同环境下的声音特征变化,并且具有较高的准确性。
然而,机器学习方法需要大量的训练数据和计算资源。
综上所述,声源定位精度和方法的选择取决于具体的应用需求和环境条件。
如果对定位精度要求较高且传感器间距较远,可以选择交叉相关定位或波束形成方法。
一种基于声发射信号的故障定位方法研究

下转第5 4 页
1 试 验 建立 过程
在此选取碾 钢作为试验样本 , 该样本 长1 0 0 0 am, r 宽3 0 am , r 在 样本 的中间形成一个 4 5 。 的V行槽 口, 距上 端为 l 0 am。 r 我们选用 7 2 1 A的 稳压 电源 为 裂 纹 检 测 仪进 行 供 电 , 用P C L 一 8 1 8 HG A/ D采集 卡采集裂纹长度 , 裂 纹 检 测仪 ( T K一 0 9 一 C P A0 2 / D P ) 检 测 裂 纹 的 长 度; 同时 , 为了通 过数据处理的方法 降低测量误差 , 我们设置了s l 和 s 2 两个是声发射传感器 ( Rl 5 ) , P AC1 2 2 0 A 为l 0 0 KHz ~ 3 0 o K Hz 硬件 滤波器完成前置滤波放 大, 双通道 数据采集卡P AC 一2 完成数据 采 集, 最终利用MI S T RAS 声发射数据分析系统对采集的数据进 行精 确 的分析l 3 1 。
图 3 信 号 Ga b o r 变换 最 大 峰 时 差定 位
图1 S1上 的原 始 声 发 射B u t t e r wo r t h滤波结果
应 用 研 究
据在协调 器汇总后 , 通 过R S 2 3 2 总线发送给上位机 , 最 终 显 示 给 用 户。 由于 Z B e e 网络 具 有 自组 网 的特 点 , 用 户 能 够 随 时 向 网 络 中 添 加 或 移 除 终 端 设 备 和路 由器 , 这使得此Z B ∞无线 网络 具 有 较 强 的 可扩展性 和环境适应性【 6 1 。 以Z i g Be e 协调 器为例说 明Z i g B e e 网络 中 设 备 的硬 件 结 构 。 Z i g B e e 协 调 器 的结 构 如 图4 所示 , 由AT me g a l 6 单片机 、 CC2 5 3 0 PA0 l Z i g B e e 无线通 讯模块 、 RS 2 3 2 接I S l 电路和 电源组成 。 其 中 CC 2 5 3 0 P A0 1 Z i g B e e 无线通讯模块接 收网络 中终端设备和 路由器 发送的数据 , 并 向Z i g B e e 路 由器 发送 数 据 ; AT me g a 1 6 单 片机 用 于 控 制 CC 2 5 3 0 P A0 1 Z i g B e e 无 线 通 讯 模块与 网络 中其他Z i g B e e 设备 的 数据 收 发 、 Z i g B e e 网络 的 自组 网 I }矶 始 化 配置 等 ; RS 2 3 2 接 口 电路 用 于 将 拉 压 力 数 据 上 传 至 上 位机 。 Z i g Be e 1 L 路 由 器 的硬 件 结 构 与 Z i g Be e 协 调 雕 愤数 转 砘 接1 l I 1. 器类似 。
声发射源的定位方法

声发射源的定位方法1.声源叠加法:声源叠加法利用多个声源同时发出声音,在接收端通过分析各个声源的声音特征来确定声源的位置。
这种方法适用于声源分布均匀、声音特征能够区分的情况。
对于每一个声源,可以通过测量声音的到达时间和幅度来确定其与接收端的距离。
2.时差测量法:时差测量法利用声音在传播过程中的传播速度来测量声源与接收端的距离。
当声音从声源发出后,经过一段时间才能到达接收端,通过测量声音的传播时间差就可以确定声源的位置。
常用的时差测量方法包括互相关法、波束形成法等。
-互相关法:将接收到的声音信号与参考信号做互相关运算,根据互相关函数的峰值位置和幅度来确定声源的位置。
-波束形成法:利用具有多个接收单元的阵列或麦克风进行声音接收,并根据接收到的信号进行波束形成,通过测量到达时间差来确定声源的位置。
3.幅度比测量法:幅度比测量法利用声音在传播过程中的能量损失来测量声源与接收端的距离。
声音在传播过程中会受到空气衰减、散射等因素的影响,幅度会随距离的增加而减小。
通过测量接收到的声音幅度比来确定声源的位置。
-三点法:利用三个接收器测量到的声音幅度比来确定声源的位置。
通过测量三个接收器之间的幅度比,可以求解出声源的位置。
4.高斯法:高斯法采用统计学方法,通过分析接收到的声音信号的统计特性来确定声源的位置。
该方法需要进行大量的声音信号采集和处理,通过建立声音信号的统计模型来推测声源的位置。
综上所述,声发射源的定位方法包括声源叠加法、时差测量法、幅度比测量法和高斯法等。
这些方法可以单独或者结合使用,根据实际应用场景和传感器条件的不同,选择合适的定位方法来实现声发射源的定位。
压力管道泄漏声发射源定位的实验研究

衰 减特 性 方 面对 互 相 关 定 位 法 和 幅度 衰 减 测 量 区 域 定 位 法 的 可 行 性 进 行 了 计 算 ,表 明 在 传 感 器
间距较小和泄漏量较小 的状态下 ,在背景噪声较小 的环境 中,用互相关 法具有较好 的定位精度 ;
而 幅度 衰 减 测 量 区域 定 位 方 法 对 泄 漏 源 的 定 位 误 差较 大 。 关 键 词 : 道 泄漏 ; 发 射 检 测 ; 定 位 ; 相 关 管 声 源 互
c mu a in t ie ih wa c o d d t o n r s u e c re po d e p n n ild c y lw e in li p e - u l t wo sd swh c sa c r e o s u d p e s r o s n x o e ta e a a wh n sg a ss r a o
l a a e o i ei e by t i y t m.Te t d a d v r e h e sbllt fatnu to a u e n frg o a s・ e k g fp p l h ss se n se n e f d t e f a i ii y o te ain me s r me to e in lpo i i i i to n t d a d c re ain p sto i g me h d fo at n ai n c a a trsi so c u tc sg asa d e e g c inig meho n o r lto o iin n t o r m t u t h r c e itc fa o si i n l n n r ya — e o
声发射源定位不确定度的计算

如设 , 丁的不 确 定度 相互 独 立 , 位置 的 △, 则
收 稿 日期 :0 10 —7 2 0 - 8 2
的不 确定 度 数据 如 图 1 示 , 据 反 映 了通过 固定 所 数
维普资讯
1ae源时差定位不确定度的计算式2源与探头间距离变化的时差不确定度ae源一维线定位传统的时差定位方法是通过检测探头接收的ae源信号的到达时差f并根据探头阵列的间距和ae信号通过探头阵列间距的时间r来计算ae源位置z如令位置z的零点为线定位的探头阵列间距的中心位置2则217可以用以下表达式
维普资讯
CALCULATI oN F 0l THE UNCERTAI NTY oF AOOUS C TI EM I S oN S I
S OURCE LOCATI oN
YAO i L 。LA e m i g ID - n
( hn i d n mi l eerhadD v lp n e tr C iaA r y a c sac n e e me t ne,Mi y n i un6 1 0 。 hn ) - aR o C a agSc定 度 为
“
() ( +瑟 ) () 抖 “ 争 “
即位 置 的不 确 定 度 取 决 于 t T, 各 自不 确 定 度 , △ 的合成 。当 tT, 的不 确定 度不 相互 独 立 时 , 的 , △
表达较为复杂 , 可参见文献 Ei 这里暂不讨论 。由 l,
姚
力等 : 声发射 源定位不确定 度的计算
间距 △ 的时差 t AE源 与探头 间距 离 .变 化 的不 随 2 7
摘
要: 针对 声发 射检 测 中的声发 射 源定位 的 不确 定性 问题 , 就其 影 响 因素 , 常 用 的 1Mn 在 6 R
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
确 定 ,坐 标 为 ( 17,0 ) , ②两 个探头 的坐 标是 ( 1 0, 0 图 1声源位 置确定 示意图
0 ) ( 。 0 ) , 10 0
声发射源线性定位 误差研究
王健 王运玲 辽宁石油化工 大学机械 工程 学院 1 30 0 1
摘 要
声发射 检 测 技 术作 为一 种 新型 动态 的检 测
技 术 已被 广 泛 地 应 用 于设 备 的 无损 检 测 、
近 几 年 ,声 发射 检 测 以其 不 町 替 代 的 优 点 得 到较 为 广 泛 的 应 用 , 各 种 声 发射 检 测仪 应 运而 生 ,声 发 射 源 定位 的 准 确程 度 已成 为影 响 声
11 . 声发射 源在两个传感 器之 间 ( 即 轴 上) ,此时 ,y ( c≤ ≤ 0 C ,解 方程得 )
在 线检 测 中 , 发射 源 的 准 确 定位 是检 测 声
过 程 的重 要环 节。 实验 室 中利 用 SA S D E 数 字声 发射 检 测 仪进 行 了断 铅 线性 定位模 拟 实验 , 采 用理 论 计 算 ,式 得 出的 声 发射 将 厶 \
曲线 方 程 。
1 ’
‘
一
8+ / 一 . 、B 44 c 或者 。—— 二 _ —— _
当信号先 到达 l 传感器时 , 。 将 代人到直 线方程 就 可以 求 出 J 的值 , ,
声源 位 置可 以 确 定 。
2. 实验 模拟
翻
本文 实 验 l 采 用断 铅 模拟 声 发 { 】 射 信号 源 ,所 用 的铅 笔 号 为 0. / 5 FB; I 耦合剂为机油。 2 1 . 一维 X 轴定 位模 拟 211 . . 数据 采集 ①实验 前将 要做断铅 实验的位置
浅显 的探 讨 。
1
一
得 出较 为有 用的 结 论 。
关键 词
声 发射 ;声 发射 源 定位 ;声 发射 信 号
、
维 源定 位 ( 又称 线性 定
的 位 置可 定 。
1 2如果知道 声源在某一条直线 . 上 ,可 通过 求解 方程 组 :
r
位 ) 原 理
线性定位是指在 一维空 间中 ,确 定声发射源位置 标 的直线定位法。 传感器 l 和 2 ,设坐标 分别为 。 (c ,0 )和 ( ,0 ,某一声源 声发 c ) 射信 号到 达 传感 器时 的时 差 为△ ,
பைடு நூலகம்
I l … 、 l 、 : ■ :
、“一 。 “ 一
i , 6 , , 十
材料 中的 声速为 ,则声发射源 到两 个 传感 器的距 离之 差 为 :
2 a ・ f △ ( 1 1 )
可 得
一
≥
0H
那 么 声源 的位 置 满 足 以 两个 传 感器 为焦点 ,以 2 a为 顶点距 离的双
源 的位 置 坐标 与实 际断 铅位 置 坐标 比 较 ,
发 射 检测 技 术 发 展的 关键 因素 ,到 当声发射信号先到 传感器, 则 目前 为止 ,还 没 有 _ 足 的 理论 计 算 亢 x a,反 之 ,x 。只要 测 出 △ , —a 与 实 际源 坐标 的 实验 对 比 数据 ,在 ’ , A 这里 对时 差线 性 定 1 = 立的精 确性 进 行 2 = ’ t,有 a △ — 一 声源