柔性多体动力学建模
一种tbm推进机构的多柔体动力学建模及仿真

一种tbm推进机构的多柔体动力学建模及仿真
1、引言
随着航空飞行技术的出现,TBM(翼尾米)推进机构(Thrust Borne Mobility,TBM)已成为盠旋技术及相关领域中最受欢迎的应用。
TBM推进机构专注于最大限度地提高飞机
的飞行性能,其中包括获得高度的飞行权限,维持安全的飞行准确性,减少飞行误差影响,以及提高飞机的机动能力。
为了使TBM的性能达到最佳状态,在建模和分析TBM之前,有必要弄清旋转翼尾米推
进器的受力情况,以及其受力的反应对机翼的影响,这样才能准确预测和操纵飞机性能。
因此,将TBM作为多柔体系统来研究是必要的。
2、研究内容
本研究将以TBM推进机构为研究对象,采用多柔体动力学(Multi Body Dynamics,MBD)技术,建模并进行模拟分析,研究TBM推进机构的受力情况,并对机翼的影响进行
分析。
首先,通过实际膜片、普通膜片与各型号涡轮设计来建立TBM推进机构的多柔体动力
学模型,用于模拟分析TBM推进机构的动力学行为,检测各涡轮对机翼结构的受力情况等。
其次,通过多柔体动力学仿真技术,对TBM推进机构在不同升力比、弯曲比、转速等情况
下的动力学行为及受力情况进行分析,研究各涡轮推进器在机翼结构上产生的影响。
3、研究结果
4、结论
建立的多柔体动力学模型能够有效地分析TBM推进机构的动力学行为以及各涡轮产生
的受力情况,并将该模型用于TBM推进机构性能分析和飞机性能操纵上,可有效提高飞机
性能。
因此,本研究工作验证了建立多柔体动力学模型来分析TBM推进机构的受力情况,
以及对机翼结构的影响,能够有效增强盠旋技术及相关领域的应用。
建立泵车臂架柔性多体动力学模型的研究
建立泵车臂架柔性多体动力学模型的研究随着工程机械的不断发展和更新换代,泵车臂架已成为混凝土输送行业不可或缺的重要工具之一。
然而,在泵车的实际工作过程中,由于运输环境、工作状态等因素的影响,泵车臂架存在一定的振动和失稳风险,极易引发事故。
因此,建立泵车臂架柔性多体动力学模型,有助于预测其动态响应行为,从而优化结构设计和提高运行稳定性能,确保工作安全可靠和人员生命财产安全。
在建立泵车臂架动力学模型的研究过程中,需要考虑如下几个方面:1.模型构建泵车臂架是一种由众多杆件拼接而成的多连接体系,其结构较为复杂。
因此,在构建动力学模型时,应根据实际泵车结构,将臂架分解为多个部分,并采用Beam Element等有限元方法构建其柔性模型。
通过建立坐标系、如加速度系、极坐标系等,确定各节点位置和变形量,进而实现臂架的物理模拟。
2.重要参数的确定泵车臂架的运行过程受到众多运动参数的影响,如运动速度、幅度、角速度等。
因此,在建立动力学模型时,需要确定合适的参数范围和数值,以保证模型的可靠性和准确性。
同时,还需要考虑一些重要参数,如泵车臂架的材料物性、密度等,以确保模型的合理性和可靠性。
3.分析建模结果建立泵车臂架动力学模型后,需要对建模结果进行分析。
首先,需要进行仿真计算,计算模型在不同工况下的响应情况。
此外,还需对模型中的各种杆件进行故障模拟,以判断泵车臂架的安全性能和稳定性能。
最后,还需与实际泵车臂架进行比对验证,以进一步提高模型的可靠性和准确性。
综上所述,建立泵车臂架柔性多体动力学模型的研究是复杂而重要的工作。
当前,我国国内在该领域的研究还比较薄弱,需要加强基础理论研究和实验验证,并结合实际工程场景,全面探索泵车臂架动力学模型的建立和应用。
只有这样,才能更好地促进泵车臂架结构和性能的优化,满足工程机械复杂工况下的使用需求,实现工业发展的可持续发展。
在泵车臂架的建模和仿真研究中,采用柔性多体动力学模型是最常见的方法之一。
多柔体系统动力学建模理论及其应用

收稿日期:20010226作者简介:仲 昕(1973-),女(汉),山东,博士生E 2m ail :xinzhong 99@sina .com 仲 昕文章编号:100328728(2002)0320387203多柔体系统动力学建模理论及其应用仲 昕,杨汝清,徐正飞,高建华(上海交通大学机器人研究所,上海 200030)摘 要:以往对机械系统进行动力学分析,要么将其抽象为集中质量—弹簧—阻尼系统,要么将其中的每个物体都看作是不变形的刚性体,但如果系统中有一些物体必须计及其变形,就必须对机械系统建立多柔体模型。
本文阐述了柔性体建模理论,并用汽车前悬架多柔体模型进行举例说明。
结果表明多柔体模型的仿真结果较多刚体动力学模型的仿真结果更接近道路试验数据结果,充分验证了多柔体建模的必要性和有效性。
关 键 词:多柔体模型;柔性体建模理论中图分类号:TH 122 文献标识码:AD ynam ic M odeli ng of M ulti -Flex ible Syste m ——Theory and Applica tionZHON G X in ,YAN G R u 2qing ,XU Zheng 2fei ,GAO J ian 2hua (In stitu te of Robo tics ,Shanghai J iao tong U n iversity ,Shanghai 200030)Abstract :In dynam ic analyses of a m echan ical system ,it is often ab stracted as a cen tralized m ass 2sp ring 2damper system ,o r every part in the system is regarded as a rigid body .How ever ,if som e parts defo rm obvi ou sly and their defo rm ati on m u st be taken in to con siderati on ,the m echan ical system m u st be modeled as a m u lti 2flex ib le body .In th is paper ,the flex ib le body modeling theo ry is demon strated firstly .T hen ,an examp le of modeling a k ind of au tomob ile’s fron t su spen si on as a m u lti 2flex ib le system is show n .F inally ,it is show n that the si m u lati on resu lts of m u lti 2flex ib le dynam ic model agree w ith the road test data mo re than tho se of m u lti 2rigid dynam ic model do .T hu s ,it is fu lly testified that u sing m u lti 2flex ib le body theo ry to model is necessary and effective .Key words :M u lti 2flex ib le body ;F lex ib le body modeling theo ry 机械系统一般是由若干个物体组成,通过一系列的几何约束联结起来以完成预期动作的一个整体,因此也可以把整个机械系统叫做多体系统。
汽车柔性多体系统动力学建模综述
・综述・汽车柔性多体系统动力学建模综述吉林工业大学 陆佑方 【Abstract】T he theo ry,m ethod,effect of model establishm ent and its develop ing status in do2 m estic and abroad as w ell as the disparity existed currently in our country are briefly summ arized.By using the theo ry and m ethod of model establishm ent fo r automo tive flexible m ulti2body system dynam ics,the analysis model of comp lete veh icle o r assem blies can be built up p recisely,and thei m itative analysis and op ti m izati on fo r fictiti ous veh icle design and dynam ics can be realized also.【摘要】对汽车柔性多体系统动力学的建模理论、方法、作用以及国内外发展状况和目前我国在这方面的差距,作了简要的综述。
应用汽车柔性多体系统动力学的建模理论和方法,可以较精确地建立整车或总成的分析模型,进而实现虚拟样车的设计和动力学仿真分析及优化。
主题词:汽车 柔性多体系统 动力学 模型Top ic words:Auto m ob ile,Flex ible m ulti-body syste m,D ynam ics,M odel1 引言1.1 传统的设计方法和流程众所周知,汽车是由发动机、车身、传动系、行驶系、转向系和制动装备等所组成的高度复杂的结构—机构动力系统,这个系统在力学中就是所谓的多体系统。
论分布式陀螺柔性体结构的动力学建模问题
论分布式陀螺柔性体结构的动力学建模问题
分布式陀螺柔性体结构的动力学建模是一个复杂而具有挑战性的问题,它涉及到多体系统的动力学特性以及陀螺效应对柔性体结构的影响。
在进行动力学建模时需要考虑多个因素,包括结构的几何形状、材料的性质、外部扰动等。
需要对分布式陀螺柔性体结构的几何形状进行描述和参数化。
一般可以使用有限元法将结构离散化为多个小单元,通过定义节点的位置和连杆的连接关系来描述结构的几何形状。
还需要对结构的陀螺部分进行描述,包括陀螺的转动轴、转动惯量等参数。
需要考虑分布式陀螺柔性体结构的材料性质。
柔性体结构通常由弹性材料制成,因此需要对材料的应力-应变关系进行建模。
可以使用线性弹性力学模型来描述材料的本构关系,即应力与应变之间的关系。
然后,需要考虑分布式陀螺柔性体结构所受到的外部扰动。
外部扰动可以包括重力、惯性力以及其他环境扰动等。
这些外部扰动会对结构的运动和变形产生影响,因此需要将外部扰动作为动力学模型的输入。
需要建立分布式陀螺柔性体结构的动力学模型。
可以使用多体动力学方法,综合考虑结构的几何形状、材料性质和外部扰动的影响。
通过求解动力学方程,可以得到结构的运动轨迹和变形情况。
在建模过程中,还可以考虑结构的控制问题,即通过对陀螺部分施加力矩来控制结构的运动。
柔性板基础隔振系统的柔性多体动力学理论建模
M o ei g o b a in I o ai n S se wi lx b eP ae s d o d l f n Vi r t s lt y tm t F e i l lt sBa e n o o h h h o y o F e i l l b d n mi s t eT e r f lx b eM u t o y Dy a c i
Ra li h Ri t o .By a p y n h h o y o e i l u t o y d n mi s h y a c mo e f y e g — t meh d z p l i g t e t e r f f x b e m l b d y a c ,t e d n mi d l o l i
统整 体 动 力学 方程 将每 个 部件 都 当作柔 性 体 , 弹性
元件 均 具有 非线 性 刚度 特性 , 因而 该 隔振 系统动 力
角 度 的运动 , 由此 使得 隔 振系 统各 设备 产 生较 大 的 离 心惯 性力 与科 氏惯 性 力 ; . 4 隔振 系统 存在 着各 种
非 线性 因素 , 大 幅度 刚体 运动 与 弹性 变形 的情 况 在
摘 要 : 据 舰 艇机 械 隔 振 系 统 的特 点 , 根 首先 利 用 瑞 利一 里 兹 法 推 导 了柔 性 板 的动 力 学方 程 , 后 结 合 椠 性 多体 动 然
力 学理 论 , 导 柔 性扳 基 础 上 的 隔振 系统 的 动力 学 模 型 。 推
基于柔性多体动力学的瓦楞成型系统建模与仿真研究
曹大志等: 基于柔性多体动力学的瓦楞成型系统建模与仿真研究
53
Qp = NT fp 其中 N 是单元的形函数。 1. 3
( 8)
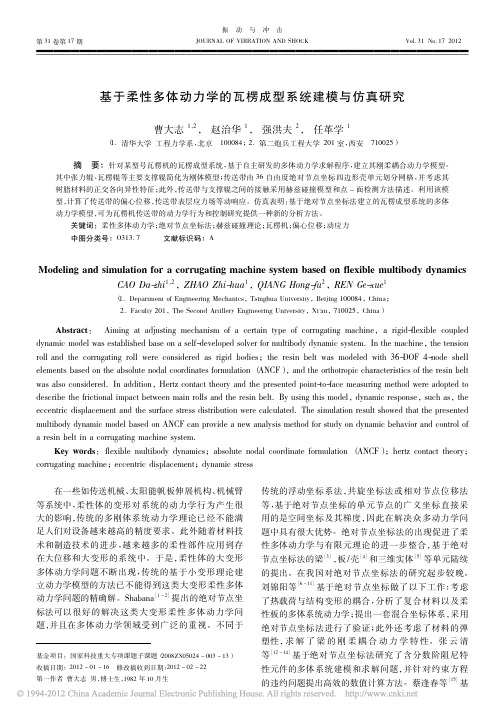
垂直, 就会造成原纸跟随传送带的跑偏、 瓦楞芯纸与面 纸板的各种翘曲等各种影响生产的异常现 纸未对齐、 象。因此有必要掌握瓦楞机的动力学行为 。 2. 1 瓦楞成型系统的尺寸及仿真模型 瓦楞成型系统是瓦楞机的核心, 主要是由传送带 与三个支撑辊 ( 两个张力辊和上瓦楞辊 ) 组成, 模型如 图 4 所示。其中将传送带考虑成柔性体, 将支撑辊考 虑成刚体, 在本文中将瓦楞辊考虑成表面光滑的圆柱 不考虑瓦楞辊的锯齿。 模型参数见表 1 , 其中碰撞 体, 相关参数由赫兹碰撞理论通过实验而得到 。
Fig. 1 The ANCbased four nodes shell element
此单元含有四个节点, 单元的广义坐标表示为: 1 T 2 T T e = [ (e ) (e ) ( e3 ) T ( e4 ) T] ( 1) 其中 e 为第 i 个节点的广义坐标, 包含有空间位置向
i
第 17 期
基于柔性多体动力学的瓦楞成型系统建模与仿真研究
曹大志
摘
1, 2
, 赵治华 1 , 强洪夫 2 , 任革学
1
( 1. 清华大学 工程力学系, 北京 100084 ; 2. 第二炮兵工程大学 201 室, 西安 710025 )
yu19对带钢的跑偏纠偏装置进行了多体动力学仿真此外还有学者对带材的跑偏行为和纠偏装置进行了实验研究20大型复杂结构本身受诸多因素的限制其实验往往很难进行因此有必要借助先进的仿真手段来得到较精确的系统模型
振 第 31 卷第 17 期
动
与
冲
第九章多柔体系统动力学分析方法概要

o
0
x'
U4
o'
Xo
Yo
O
图9-3 随动坐标系
X
u T U Us .
(9-19)
式中 U U1 U6 为单元结点在整体坐标系下的位移向量; T 为方向变换矩阵;U s 为附加位移向量。
c s 0 T 0 0 0 s c 0 0 0 0 0 0 0 0 1 0 0 c 0 s 0 0 0 0 0 s c 0 0 0 0 0 0 1
K
T T T 1 1 T 1 2 T 1 0 0 T T s
(9-7)
(9-8)
由于坐标转换矩阵 T 不再是常数矩阵,方程(9-7)是一个 变系数非线性微分方程。系统方程的组建和求解非常困难。
9.2 基于多柔性系统动力学的平面梁单元运动方程:
2
9.3.1结点运动参数在整体与随动坐标系下的关系
如图9-3所示随动坐标系,图中XOY 为整体坐标系,
xoy 为随动坐标系,其初始时与单元局部坐标系x ' o' y ' 重合
由图9-3可得随动坐标系和整体坐标系下结点位移的相互关系
Y
u6
U6
y
u3
U3
u5
u4
U5
x
y'
U2
X oo Yoo
U1Leabharlann u1u2 0 70 0 0 140 0 0 0 0 156 22L 0 0 36 54 13 L 2 2 0 22L 4L 0 13L 3L I 0 3L aL 420 70 0 0 140 0 0 30L 0 0 0 54 13L 0 156 22L 0 36 2 2 0 13L 3L 0 22L 4L 0 3 L
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
柔性多体动力学建模
、仿真与控制
近二十年来,柔性多体系统多力学(the dynamics of the flexible multibody systems)的研究受到了很大的关注。
多体系统正越来越多地用来作为诸如机器人、机构、链系、缆系、空间结构和生物动力学系统等实际系统的模型。
huston认为:
“多体动力学是目前应用力学方面最活跃的领域之一,如同任何发展中的领域一样,多体动力学正在扩展到许多子领域。
最活跃的一些子领域是:
模拟、控制方程的表述法、计算机计算方法、图解表示法以及实际应用。
这些领域里的每一个都充满着研究机遇。
”多柔体系统动力学近年来快速发展的主要推动力是传统的机械、车辆、军械、机器人、航空以及航天工业现代化和高速化。
传统的机械装置通常比较粗重,且*作速度较慢,因此可以视为由刚体组成的系统。
而新一代的高速、轻型机械装置,要在负载/自重比很大,*作速度较高的情况下实现准确的定位和运动,这是其部件的变形,特别是变形的动力学效应就不能不加以考虑了。
在学术和理论上也很有意义。
关于多柔体动力学方面已有不少优秀的综述性文章。
在多体系统动力学系统中,刚体部分:
无论是建模、数值计算、模拟前人都已做得相当完善,并已形成了相应的软件。
但对柔性多体系统的研究才开始不久,并且柔性体完全不同于刚性体,出现了很多多刚体动力学中不呈遇到的问题,如:
复杂多体系统动力学建模方法的研究,复杂多体系统动力学建模程式化与计算效率的研究,大变形及大晃动的复杂多体系统动力学研究,方程求解的stiff数值稳定性的研究,刚柔耦合高度非线性问题的研究,刚-弹-液-控制组合的复杂多体系统的运动稳定性理论研究,变拓扑结构的多体系统动力学与控,复杂多体系统动力学中的离散化与控制中的模态阶段的研究等等。
柔性多体动力学而且柔性多体动力学的发展又是与当代计算机和计算技术的蓬勃发展密切相关的,高性能的计算机使复杂多体动力学的仿真成为可能,特别是计算机的功
能今后将有更大的发展,柔性多体必须抓住这个机遇,加强多体动力学的算法研究和软件发展,不然就不是现代力学,就不是现代化。
柔性多体系统动力学时多刚体动力学、连续介质力学、结构动力学、计算力学、现代控制理论等构成的一门交叉性、边缘性学科,这门学科之所以能建立和迅速发展是与当代计算机技术的爆炸式发展分不开的。
由于近20年来卫星及航天器飞行稳定性、太阳帆板展开、姿态控制、交会对接的需求和失败的教训以及巨型空间站的构建;高速、轻型地面车辆、机器人、精密机床等复杂机械的高性能、高精度的设计要求等,柔性多体系统动力学引起了广泛的兴趣,已成为理论和应用力学的一个极其活跃的领域。
柔性多体系统动力学、稳定性与控制的研究已由局部扩展到全局,由小扰动扩展到有限扰动,传统的理论和方法已显得不足,引入现代数学方法的成果如群、拓扑与微分流行及其代数、几何与分析、动力系统理论等都是非常重要的。
事实上,柔性多体系统中物体的整体运动与变性的耦合可以看作两种场的相互作用,他和量子场论及基本粒子领域中的相互作用问题是类似的,在理论物理中处理场相互作用的一般理论框架是规范场理论,在数学上规范场论和现代微分几何学是密切相连的,他就是主纤维丛上的联络理论,对柔性多体系统来说,规范理论的基本几何模型是时间轴的so
(3)或e
(3)主纤维丛。
这个主纤维丛的集合结构与柔性多体系统位形空间上由度规确定的集合结构之间的关系是很值得研究的从几何结构角度探讨柔性多体系统非线性效应的一些定性特征,如运动稳定性,分叉及混沌,不仅有助于现代数学、物理和力学之间的交叉与渗透,同时也必将为解决这类强非线性力学问题带来新概念和新方法。
由于柔性多体动力学动力分析的目的主要是控制其影响,因此动力学建模、控制策略设计和计算机是实施动力分析的不可分割的整体。
在控制问题中,柔性多体系统是带分布参数的强耦合、非线性、多输入、多输出系统。
首先,传统的pid控制和现行化方法将难以适用,应考虑其他高级控制策略,如鲁棒控制、自适应控制、变结构控制、非线性补偿控制等等。
其次,各弹性部件是无穷的,需要离散化,用一个有线维空间来代替无限维的变形状态
空间,必须研究有限维模型与无限维模型建的相互关系,特别是剩余子系统对受控系统的影响,研究控制溢出问题。
再次,由于逆运动学的不确定性,给控制输入的预估带来极大困难。
最后,为达到在线实时控制的目的,对计算方法、软硬件设计等都提出了更高要求。
这些都与柔性多体动力学建模息息相关。
要根据动力学与控制不可分原理来进行柔性多体系统的综合建模和优化。
柔性多体动力学分析的内容可以包含一切宏观机械系统动力学问题,多刚体动力学、结构动力学等都可以看成是柔性多体动力学的蜕化。
应该指出,这些学科都有着一整套适合于自身发展完善的理论体系,是任何学科都代替不了的,然而,柔性多体系统动力学有不是所谓的“穿着新衣的老问题”,他需要在各学科交叉基础上形成自己的研究方法和体系,发现新的生长点,它的发展对原有各学科的补充和促进将起着不可估量的作用。
渴望不久的将来,在柔性多体系统动力学的所有方面的研究将有重大的进展,他所面临的是光明和挑战性的未来。
柔性多体动力学建模、仿真与控制在这个计算机飞速发展的时代显得尤为重要。
最近几年,冯康提出哈米尔顿动力体系的保辛差分为保守体系数值积分指出了方向。
钟万勰等基于计算力学和最优控制的相似性将哈米尔顿体系理论应用于有限元并发展了精细积分方法。
林家浩提出了高效的随机振动的确定性算法,提高了这类问题的计算效率1~2个量阶。
如果将以上方法用于多体动力学的仿真上,可以使我国在计算机落后的条件下整体仿真技术达到先进水平。
但是,评价分析模型预测的可靠性,是柔性多体动力学数值仿真中最困难的问题。
所谓可靠性,这这里是用来标志计算模型的响应预测与实际系统相应间的一致性。
可靠性评价和控制也就是精度评价和控制问题。
影响可靠性的因素很多,主要由下列四方面:
一、实际模型抽象成分析模型的可靠性,例如:
材料性质、几何形状、约束性质、载荷条件、阻尼、间隙;浮动框架与其函数、解耦合和线性化程度、物理模型的离散化有限维截断、刚性还是柔性的抽象等等。
应建立更为高速机构动力学模型,该模型不仅应正确反映出构建弹性变形对机构大范围运动的影响,而且还应正确体现出机构的大范围运动对构建弹性变形的耦合程度。
二、分析模型的数值离散、无限过程的阶段,建立其具有针对性的有效、可靠的数值计算方法。
三、突破计算机执行数值计算的精度限制,建立其具有针对性的有效、可靠的数值计算方法。
四、解的稳定性。
由于柔性多体系统不存在响应的精确解,并且目前还没有可供试验对比的事物模型测试条件,因此选择有价值的可靠性评价准则,发展可靠的手段来估计计算模型预测的误差和控制问题待解决。
在整个仿真研究的深入过程中,向研究者提出新的挑战,而正是有了这些挑战,才激发人们不断地去探索、去追求,最终达到较完善的柔性多体系统动力学理论的形成。