视频目标跟踪算法综述_蔡荣太
视频目标跟踪算法综述

视频目标跟踪算法综述目标跟踪算法可以分为两类:基于模型的跟踪和基于特征的跟踪。
基于模型的跟踪算法通常通过建立目标的动态模型来预测目标的位置,而基于特征的跟踪算法则通过提取目标的特征信息来跟踪目标。
基于模型的跟踪算法中,最常见且经典的算法是卡尔曼滤波器算法。
该算法通过对目标位置进行状态预测,并融合传感器测量数据来更新目标的状态估计。
卡尔曼滤波器算法在目标运动较稳定且传感器测量误差较小的情况下表现良好,但在目标运动不规律或传感器测量误差较大的情况下容易出现跟踪丢失的问题。
基于特征的跟踪算法则通过提取目标的外观特征信息来跟踪目标。
常见的特征包括颜色、纹理、形状等。
其中,颜色特征是最常用的特征之一,因为它对光照变化具有一定的鲁棒性。
常见的颜色特征提取算法有颜色直方图、颜色模型等。
此外,还有一些基于纹理的特征提取算法,如Gabor滤波器、局部二值模式(LBP)等。
除了上述传统的目标跟踪算法,近年来深度学习技术的发展为目标跟踪带来了新的突破。
通过使用深度神经网络进行特征提取和目标分类,深度学习方法在目标跟踪任务上取得了很好的效果。
其中,基于卷积神经网络(CNN)的跟踪算法在目标检测和特征提取方面表现出色。
基于深度学习的目标跟踪算法通常采用两种方式进行训练:有监督学习和无监督学习。
有监督学习通过标注好的训练数据进行模型训练,而无监督学习则通过对未标注的视频序列进行训练。
近年来,基于深度学习的目标跟踪算法取得了显著的进展,并在各种跟踪性能评估指标上取得了优秀的结果。
然而,由于深度学习方法通常需要大量的数据和计算资源进行训练,因此在一些实际应用中仍然存在一定的局限性。
综上所述,视频目标跟踪是计算机视觉中的一个重要研究方向。
传统的基于模型和基于特征的跟踪算法以及近年来兴起的基于深度学习的跟踪算法为视频目标跟踪提供了不同的解决方案。
未来随着技术的不断进步,视频目标跟踪算法将不断发展,并在各种实际场景中得到更广泛的应用。
视频监控系统中的目标跟踪算法综述
视频监控系统中的目标跟踪算法综述视频监控系统在现代社会中扮演着至关重要的角色,用于维护公共安全和保护财产。
其中,目标跟踪算法作为视频监控系统中的关键技术,承担着实时、准确、自动跟踪目标的任务。
本文将对视频监控系统中的目标跟踪算法进行综述,并探讨其应用和未来发展趋势。
目标跟踪算法是指通过分析连续帧图像中目标的位置和运动信息,准确定位、识别并跟踪目标在时间序列中的位置。
根据跟踪方法的不同,目标跟踪算法可以分为基于模型的方法、基于特征的方法和混合方法。
首先,基于模型的目标跟踪算法通过构建和更新目标模型来实现跟踪。
其中,粒子滤波算法是一种经典的基于模型的目标跟踪方法,通过采用概率分布来估计目标位置和速度。
该算法可以通过对粒子进行加权更新来实现准确的目标跟踪,但对目标外观模型的选择和更新策略的设计要求高。
其次,基于特征的目标跟踪算法利用目标的边缘、颜色、纹理等特征信息来进行跟踪。
其中,卡尔曼滤波算法是一种常用的基于特征的目标跟踪方法,通过结合运动模型和观测模型来估计目标的位置和速度。
然而,该算法在目标存在非线性运动或者观测误差较大时容易产生跟踪漂移。
最后,混合方法是将基于模型和基于特征的目标跟踪算法相结合,以融合两者的优势。
例如,以卡尔曼滤波算法为基础的条件随机场目标跟踪方法,通过引入马尔可夫链来建模目标的状态转移,同时考虑目标的空间邻接关系,从而实现更准确的目标跟踪。
然而,在实际应用中,视频监控系统面临着许多挑战。
其中包括复杂的场景背景、光照变化、目标遮挡等问题。
为了克服这些挑战,研究者们提出了许多改进的目标跟踪算法。
一种常用的改进方法是引入深度学习技术。
深度学习可以自动学习目标的特征表示,通过卷积神经网络等深度学习模型来实现目标跟踪。
例如,基于深度学习的Siamese网络目标跟踪方法通过将目标和背景分别表示为两个共享网络,来实现更加准确的目标跟踪。
另一种改进方法是引入多目标跟踪技术。
多目标跟踪算法可以同时跟踪多个目标,并考虑目标之间的相互关系和交互作用。
视频目标跟踪综述

视频目标跟踪综述作者:张丰,冯平来源:《计算机时代》2022年第01期摘要:研究近年来主流的目标跟踪算法。
通过文献阅读和归纳对比,分析了使用生成式模型和判别式模型的目标跟踪算法。
结果显示,对于存在复杂干扰因素的场景,采用第二类模型的目标跟踪算法的跟踪效果更好。
文章为视频跟踪领域的研究者们提供了一个关于目标跟踪算法的客观分析。
关键词:目标跟踪; 深度学习; 相关滤波; 计算机视觉中图分类号:TP399 文献标识码:A 文章编号:1006-8228(2022)01-32-04Overview on video target trackingZhang Feng, Feng Ping(Guizhou University of Finance and Economics, Guiyang, Guizhou 550025, China)Abstract: This paper focuses on the mainstream target tracking algorithms in recent years, and analyzes the target tracking algorithms using generative and discriminative models through literature reading and inductive comparison. The results show that for the scenes with complex interference factors, the target tracking algorithms using the second kind of model have better tracking effect. This paper provides an objective analysis of target tracking algorithms for researchers in the field of video tracking.Key words: target tracking; deep learning; correlation filtering; computer vision0 引言根据人们对感知觉的研究发现,人们通过视觉、听觉、味觉、嗅觉和肤觉来接受外部的刺激,其中视觉是人们获取外部刺激的最主要途径,约占80%。
基于.Net的视频跟踪仿真平台设计
基于.Net的视频跟踪仿真平台设计蔡荣太;雷凯;张旭光;王延杰【期刊名称】《计算机仿真》【年(卷),期】2007(24)12【摘要】为提高视频跟踪算法的研发效率,降低成本,设计了基于.net的视频跟踪仿真平台.首先介绍了重心跟踪、相关跟踪、运动检测等实际工程中常用的视频跟踪算法.在此基础上提出了基于计算机的视频跟踪仿真平台的设计思路.结合.Net,特别是CImage类介绍了视频跟踪仿真平台的实现过程:用CFileDialog打开图像文件、用图像处理算法实现视频跟踪、用Bitblt等显示处理结果的图像和数据等.实验结果表明该设计能够很好地实现视频跟踪的功能,便于视频跟踪算法研发人员分析不同算法的跟踪性能和计算时间,以验证算法的可行性,为算法的工程移植提供有力的参考依据.【总页数】4页(P181-184)【作者】蔡荣太;雷凯;张旭光;王延杰【作者单位】中国科学院长春光学精密机械与物理研究所图像室,吉林,长春,130033;中国科学院研究生院,北京,100039;中国科学院长春光学精密机械与物理研究所图像室,吉林,长春,130033;中国科学院研究生院,北京,100039;中国科学院长春光学精密机械与物理研究所图像室,吉林,长春,130033;中国科学院研究生院,北京,100039;中国科学院长春光学精密机械与物理研究所图像室,吉林,长春,130033【正文语种】中文【中图分类】TP391.9【相关文献】1.基于虚拟现实的视频跟踪仿真系统设计与实现 [J], 王蕾;宋文忠;吴剑锋2.基于TMS320C6416的PCI接口视频跟踪平台设计 [J], 沈美丽;陈殿仁;宋华军3.一种基于FPGA的实时视频跟踪系统硬件平台设计 [J], 刘紫燕;冯亮;祁佳4.基于.Net平台的DNS域名解析\r仿真实验教学设计 [J], 奚婧;胡文骅5.基于OPNET开发平台的太赫兹MAC协议仿真模型设计 [J], 刘颖出;李宁因版权原因,仅展示原文概要,查看原文内容请购买。
目标跟踪算法在视频监控中的应用研究
目标跟踪算法在视频监控中的应用研究引言随着科技的发展和进步,视频监控成为了现代社会中不可或缺的一个环节。
视频监控系统广泛应用于公共安全、交通管制、商业安全等领域。
而目标跟踪算法作为视频监控系统中的核心技术之一,对于实现准确、高效的目标监控和追踪具有重要意义。
本文将探讨目标跟踪算法在视频监控中的应用研究,以及其面临的挑战并提出改进方法。
一、目标跟踪算法的概述目标跟踪算法是一种通过利用连续的视频帧来追踪特定目标的技术。
其主要目标是在不同的视频帧中定位和追踪目标物体,以实现对物体的准确的位置和运动轨迹的监控。
目标跟踪算法的本质是通过学习目标的外观特征和运动模式,结合图像处理和机器学习等技术手段,来实现对目标物体的实时监控和追踪。
二、目标跟踪算法的应用目标跟踪算法在视频监控领域有着广泛的应用。
首先,它可以用于公共安全领域,如监控街道、广场、地铁站等公共场所。
通过对这些区域进行实时监控,可以有效预防犯罪和提高公共安全。
其次,目标跟踪算法可以应用于交通管制领域。
通过对道路上的车辆、行人等目标进行实时监控,可以实现交通流量的统计分析,并及时采取相应的措施来缓解交通拥堵。
此外,目标跟踪算法还可以应用于商业安全领域,如超市、商场等场所的监控和防盗。
通过对潜在的盗窃行为进行实时监控,可以降低物品损失和提高商业安全。
三、目标跟踪算法面临的挑战尽管目标跟踪算法具有广泛的应用前景,但在实际应用中仍然面临一些挑战。
首先,光照变化和遮挡问题会影响目标的外观特征,导致跟踪算法表现不佳。
例如,当目标在强烈的阳光下或被其他物体部分遮挡时,很难准确跟踪目标物体。
其次,目标在视频帧中的运动速度过快或过慢也会带来困难。
当目标快速移动时,需要更高的采样率和更精确的运动预测,以适应目标的运动速度;而目标的低速运动可能会导致目标的丢失或误检测。
最后,复杂的背景和目标之间的相似性也是一个挑战。
当目标与背景颜色或纹理相似时,目标跟踪算法可能会将背景错误地识别为目标,影响跟踪的准确性。
视频目标跟踪算法综述
视频目标跟踪算法综述
刘艺;李蒙蒙;郑奇斌;秦伟;任小广
【期刊名称】《计算机科学与探索》
【年(卷),期】2022(16)7
【摘要】视频目标跟踪是计算机视觉领域重要的研究内容,主要研究在视频流或者图像序列中定位其中感兴趣的物体。
视频目标跟踪在视频监控、无人驾驶、精确制导等领域中具有广泛的应用,因此,全面地综述视频目标跟踪算法具有重要的意义。
首先根据挑战来源不同,将视频目标跟踪技术面临的挑战分为目标自身因素和背景因素两方面,并分别进行总结;其次将近些年典型的视频目标跟踪算法分为基于相关滤波的视频目标跟踪算法和基于深度学习的视频目标跟踪算法,并进一步将基于相关滤波的视频目标跟踪算法分为核相关滤波算法、尺度自适应相关滤波算法和多特征融合相关滤波算法三类,将基于深度学习的视频目标跟踪算法分为基于孪生网络的视频目标跟踪算法和基于卷积神经网络的视频目标跟踪算法两类,并对各类算法从研究动机、算法思想、优缺点等方面进行分析;然后介绍了视频目标跟踪算法中常用的数据集和评价指标;最后总结了全文,并指出视频目标跟踪领域未来的发展趋势。
【总页数】12页(P1504-1515)
【作者】刘艺;李蒙蒙;郑奇斌;秦伟;任小广
【作者单位】国防科技创新研究院;军事科学院
【正文语种】中文
【中图分类】TP391.4
【相关文献】
1.在线多目标视频跟踪算法综述
2.基于相关滤波的视频目标跟踪算法综述
3.视频目标跟踪算法综述
4.基于深度学习的目标视频跟踪算法综述
5.视频运动目标跟踪算法研究综述
因版权原因,仅展示原文概要,查看原文内容请购买。
视频图像中运动目标跟踪算法研究综述
视频图像中运动目标跟踪算法研究综述作者:凌超吴薇来源:《科技资讯》2012年第16期摘要:分析和描述了当前运动目标跟踪的有关方法,通过分类介绍的形式,从跟踪方法的研究现状、研究进展、应用领域等方面进行讨论。
比较介绍了几种方法的优缺点以及研究过程中所面临的难题。
最后对运动目标跟踪算法的研究前景进行了展望。
关键词:目标跟踪视频图像机器视觉中图分类号:TP3 文献标识码:A 文章编号:1672-3791(2012)06(a)-0007-01随着计算机技术的飞速发展,视频图像中的运动目标跟踪作为计算机科学、人工智能、数学等多学科的结晶,逐渐成为图像处理和计算机视觉领域的研究热点,其应用范围也逐渐拓展,目前,运动目标跟踪已经运用到了智能人机交互、医疗诊断、军事制导、天文观测、安全监控等众多领域。
因此,在实际应用中,对运动目标跟踪算法的研究具有重要的理论价值和现实意义。
1 基于区域的跟踪基于区域的跟踪方法首先要得到包含目标的区域模板,模板的提取一般通过图像分割获得或者是预先人为确定,模板通常为略大于目标的矩形,也可以是不规则形状,然后设定一个相似性度量,在序列图像中搜索目标,把度量取极值时对应的区域作为对应帧中的目标区域。
由于提取的目标模板是以目标整体作为对象,它包含了较完整的目标信息,因而具有较高的可信度。
由于该方法以目标的整体特征信息作为跟踪依据,所以在目标发生较小形变等情况下仍然可以准确的对目标进行跟踪;在目标未被遮挡时,跟踪的准确性和鲁棒性也较好。
其缺点首先是这种方法需要对整个图像区域进行搜索,要求获取的信息较多,因此比较耗时,不能满足实际应用中视频监控实时性的要求,这种方法一般用于跟踪较小的目标或者对比度较低的目标;而且跟踪的目标变形不能太大,否则会导致跟踪精度下降甚至目标丢失;而且,当目标出现太大遮挡时,也容易造成跟踪目标的丢失。
针对这些缺陷,近年来,对于基于区域跟踪方法研究最多的是如何处理包含目标的模板更新,以保证跟踪的连续性和稳定性。
视频目标跟踪算法研究
视频目标跟踪算法研究视频目标跟踪算法研究一、引言随着计算机视觉技术的快速发展,视频目标跟踪算法为机器学习和人工智能领域提供了重要的基础。
视频目标跟踪算法可用于实时监控、自动驾驶、智能安防等诸多应用领域,大大提升了智能系统的性能和功能。
本文旨在探讨视频目标跟踪算法的研究现状、方法和挑战。
二、视频目标跟踪算法概述视频目标跟踪是指在给定视频序列中,根据第一帧或者人为指定的初始目标位置,通过计算机视觉和机器学习技术,实现对目标在整个视频序列中的位置和状态的准确定位和追踪。
视频目标跟踪算法主要分为基于特征的方法和基于深度学习的方法两大类。
1. 基于特征的方法基于特征的方法利用目标在图像中的某些显著特征,如颜色、形状、纹理等进行目标跟踪。
这类方法的优点是计算简单,速度快,但对于目标外观的变化和光照条件的变化较为敏感。
常见的基于特征的方法有均值漂移算法、卡尔曼滤波算法等。
2. 基于深度学习的方法基于深度学习的方法利用深度神经网络对目标进行特征提取和表示,并通过监督或无监督学习的方式实现目标跟踪。
这类方法在处理目标外观变化和光照条件变化方面更具鲁棒性,但也需要大量的训练数据和计算资源支持。
常见的基于深度学习的方法有卷积神经网络(CNN)、循环神经网络(RNN)等。
三、视频目标跟踪算法研究现状目前,视频目标跟踪算法研究主要集中在以下几个方面:1. 多目标跟踪多目标跟踪是指同时追踪视频中多个目标。
由于多目标之间存在相互遮挡、相似外观等问题,多目标跟踪是一个比较复杂的问题。
研究者们通过引入关联滤波器、目标分割等技术,提出了一系列针对多目标跟踪的算法,取得了一定的进展。
2. 长时目标跟踪长时目标跟踪是指目标在视频中间断出现和消失的情况下的跟踪。
由于目标的外观和姿态在间断期间可能发生很大变化,长时目标跟踪是一个更加困难的问题。
目前,研究者们通过引入复杂的神经网络结构和目标模型更新机制,成功研发了一些针对长时目标跟踪的算法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1引言目标跟踪可分为主动跟踪和被动跟踪。
视频目标跟踪属于被动跟踪。
与无线电跟踪测量相比,视频目标跟踪测量具有精度高、隐蔽性好和直观性强的优点。
这些优点使得视频目标跟踪测量在靶场光电测量、天文观测设备、武器控制系统、激光通信系统、交通监控、场景分析、人群分析、行人计数、步态识别、动作识别等领域得到了广泛的应用[1-2]。
根据被跟踪目标信息使用情况的不同,可将视觉跟踪算法分为基于对比度分析的目标跟踪、基于匹配的目标跟踪和基于运动检测的目标跟踪。
基于对比度分析的跟踪算法主要利用目标和背景的对比度差异,实现目标的检测和跟踪。
基于匹配的跟踪主要通过前后帧之间的特征匹配实现目标的定位。
基于运动检测的跟踪主要根据目标运动和背景运动之间的差异实现目标的检测和跟踪。
前两类方法都是对单帧图像进行处理,基于匹配的跟踪方法需要在帧与帧之间传递目标信息,对比度跟踪不需要在帧与帧之间传递目标信息。
基于运动检测的跟踪需要对多帧图像进行处理。
除此之外,还有一些算法不易归类到以上3类,如工程中的弹转机跟踪算法、多目标跟踪算法或其他一些综合算法。
2基于对比度分析的目标跟踪算法基于对比度分析的目标跟踪算法利用目标与背景在对比度上的差异来提取、识别和跟踪目标。
这类算法按照跟踪参考点的不同可以分为边缘跟踪、形心跟踪和质心跟踪等。
这类算法不适合复杂背景中的目标跟踪,但在空中背景下的目标跟踪中非常有效。
边缘跟踪的优点是脱靶量计算简单、响应快,在某些场合(如要求跟踪目标的左上角或右下角等)有其独到之处。
缺点是跟踪点易受干扰,跟踪随机误差大。
重心跟踪算法计算简便,精度较高,但容易受到目标的剧烈运动或目标被遮挡的影响。
重心的计算不需要清楚的轮廓,在均匀背景下可以对整个跟踪窗口进行计算,不影响测量精度。
重心跟踪特别适合背景均匀、对比度小的弱小目标跟踪等一些特殊场合。
图像二值化之后,按重心公式计算出的是目标图像的形心。
一般来说形心与重心略有差别[1-2]。
3基于匹配的目标跟踪算法3.1特征匹配特征是目标可区别与其他事物的属性,具有可区分性、可靠性、独立性和稀疏性。
基于匹配的目标跟踪算法需要提取目标的特征,并在每一帧中寻找该特征。
寻找的文章编号:1002-8692(2010)12-0135-04视频目标跟踪算法综述*蔡荣太1,吴元昊2,王明佳2,吴庆祥1(1.福建师范大学物理与光电信息科技学院,福建福州350108;2.中国科学院长春光学精密机械与物理研究所,吉林长春130033)【摘要】介绍了视频目标跟踪算法及其研究进展,包括基于对比度分析的目标跟踪算法、基于匹配的目标跟踪算法和基于运动检测的目标跟踪算法。
重点分析了目标跟踪中特征匹配、贝叶斯滤波、概率图模型和核方法的主要内容及最新进展。
此外,还介绍了多特征跟踪、利用上下文信息的目标跟踪和多目标跟踪算法及其进展。
【关键词】目标跟踪;特征匹配;贝叶斯滤波;概率图模型;均值漂移;粒子滤波【中图分类号】TP391.41;TN911.73【文献标识码】ASurvey of Visual Object Tracking AlgorithmsCAI Rong-tai1,WU Yuan-hao2,WANG Ming-jia2,WU Qing-xiang1(1.School of Physics,Optics,Electronic Science and Technology,Fujian Normal University,Fuzhou350108,China;2.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Science,Changchun130033,China)【Abstract】The field of visual object tracking algorithms are introduced,including visual tracking based on contrast analysis,visual tracking based on feature matching and visual tracking based on moving detection.Feature matching,Bayesian filtering,probabilistic graphical models,kernel tracking and their recent developments are analyzed.The development of multiple cues based tracking,contexts based tracking and multi-target tracking are also discussed.【Key words】visual tracking;feature matching;Bayesian filtering;probabilistic graphical models;mean shift;particle filter·论文·*国家“863”计划项目(2006AA703405F);福建省自然科学基金项目(2009J05141);福建省教育厅科技计划项目(JA09040)算法描述能力状态表示方法拓扑结构KF 线性、高斯一个随机变量(向量)固定PF 非线性、任意分布一个随机变量(向量)固定HMMs 非线性、任意分布一个随机变量(向量)固定DBNs非线性、任意分布随机变量(向量)集可变表1贝叶斯跟踪方法过程就是特征匹配过程。
特征提取是一种变换或者编码,将数据从高维的原始特征空间通过映射,变换到低维空间的表示。
根据Marr 的特征分析理论,有4种典型的特征计算理论:神经还原论、结构分解理论、特征空间论和特征空间的近似。
神经还原论直接源于神经学和解剖学的特征计算理论,它与生物视觉的特征提取过程最接近,其主要技术是Gabor 滤波器、小波滤波器等。
结构分解理论是到目前为止唯一能够为新样本进行增量学习提供原则的计算理论,目前从事该理论研究的有麻省理工学院实验组的视觉机器项目组等。
特征空间论主要采用主分量分析(PCA )、独立分量分析(ICA )、稀疏分量分析(SCA )和非负矩阵分解(NMF )等技术抽取目标的子空间特征。
特征空间的近似属于非线性方法,适合于解决高维空间上复杂的分类问题,主要采用流形、李代数、微分几何等技术[1]。
目标跟踪中用到的特征主要有几何形状、子空间特征、外形轮廓和特征点等。
其中,特征点是匹配算法中常用的特征。
特征点的提取算法很多,如Kanade LucasTomasi (KLT )算法、Harris 算法、SIFT 算法以及SURF 算法等。
特征点一般是稀疏的,携带的信息较少,可以通过集成前几帧的信息进行补偿。
目标在运动过程中,其特征(如姿态、几何形状、灰度或颜色分布等)也随之变化。
目标特征的变化具有随机性,这种随机变化可以采用统计数学的方法来描述。
直方图是图像处理中天然的统计量,因此彩色和边缘方向直方图在跟踪算法中被广泛采用。
3.2贝叶斯跟踪目标的运动往往是随机的,这样的运动过程可以采用随机过程来描述。
很多跟踪算法往往建立在随机过程的基础之上,如随机游走过程、马尔科夫过程、自回归(AR )过程等。
文献[3]和文献[4]采用二阶AR 模型来跟踪目标的运动,采用一阶AR 模型来跟踪目标的尺度变化。
随机过程的处理在信号分析领域较成熟,其理论和技术(如贝叶斯滤波)可以借鉴到目标跟踪中。
贝叶斯滤波中,最有名的是Kalman 滤波(KF )。
KF 可以比较准确地预测平稳运动目标在下一时刻的位置,在弹道目标跟踪中具有非常成功的应用。
一般而言,KF 可以用作跟踪方法的框架,用于估计目标的位置,减少特征匹配中的区域搜索范围,提高跟踪算法的运行速度。
KF 只能处理线性高斯模型,KF 算法的两种变形EKF 和UKF 可以处理非线性高斯模型。
两种变形扩展了KF 的应用范围,但是不能处理非高斯非线性模型,这个时候就需要用粒子滤波(PF )。
由于运动变化,目标的形变、非刚体、缩放等问题,定义一个可靠的分布函数是非常困难的,所以在PF 中存在例子退化问题,于是引进了重采样技术。
事实上,贝叶斯框架下视觉跟踪的很多工作都是在PF 框架下寻找更为有效的采样方法和建议概率分布。
这些工作得到了许多不同的算法,如马尔可夫链蒙特卡洛(MCMC )方法、Unscented 粒子滤波器(UPF )、Rao-Blackwellised 粒子滤波器(RBPF )等。
文献[5]引入了一种新的自适应采样方法———序贯粒子生成方法,在该方法中粒子通过重要性建议概率密度分布的动态调整顺序产生。
文献[6]根据率失真理论推导了确定粒子分配最优数目的方法,该方法可以最小化视觉跟踪中粒子滤波的整体失真。
文献[7]计算最优重要性采样密度分布和一些重要密度分布之间的KL 距离,分析了这些重要密度分布的性能。
文献[8]在粒子滤波框架下,采用概率分类器对目标观测量进行分类,确定观测量的可靠性,通过加强相关观测量和抑制不相关观测量的方法提高跟踪性能。
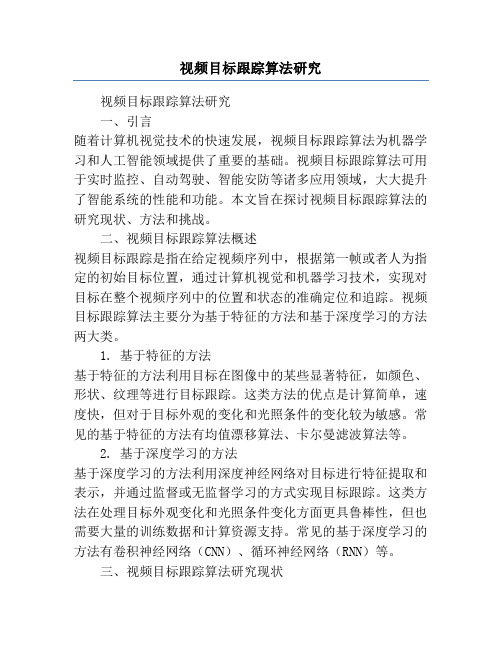
除了KF 和PF 之外,隐马尔科夫模型(HMMs )和动态贝叶斯模型(DBNs )[9]也是贝叶斯框架下重要的视觉跟踪方法。
HMMs 和DBNs 将运动目标的内部状态和观测量用状态变量(向量)表示,DBNs 使用状态随机变量(向量)集,并在它们之间建立概率关联。
HMMs 将系统建模为马尔科夫过程。
这些算法的主要区别如表1所示。
表1中每个简单的算法都可以看成是下一行复杂算法的特例。
反之,每个复杂算法都可以看成是简单算法的扩展。
其中,DBNs 具有最佳的灵活性,可以处理不同的运动模型和不同的状态变量组合。
DBNs 又可以看作概率图模型(PGMs )[9]的一个例子。
PGMs 的基本思想是用图形的方式将多变量概率分布分解,统计变量用图的节点表示,变量间的条件关系用图的连接或边表示。
PGMs 可以分为有向图(DAGs )和无向图(Ugs )。
前者能够处理时间模式,适合目标跟踪和场景理解等任务。
后者能很好地描述图像像素之间的空间依赖性,适合图像分割和图像分析等任务。
通过组合图理论和概率理论,PGMs 可以用来处理问题描述中的不确定性。
不确定性恰好符合人类视觉系统中天然的概率性和视觉模糊性(如遮挡、从3D 到2D 投影的信息损失)。
通过规定概率模型元素之间的关系,PGMs可以有效地表示、学习和计算复杂的概率模型。
PGMs能够有效地组合目标的动态信息和外观信息,有效解决目标的运动估计问题,为目标跟踪提供了很好的理论框架。