目标跟踪综述(1)
多目标跟踪综述

结论:本次演示对多目标跟踪的研究现状、方法及应用进行了综述。多目标 跟踪作为一种重要的计算机视觉任务,其研究经历了起步、发展和突破等阶段, 目前已经应用于视频监控、智能交通、无人驾驶等多个领域中并取得了显著的实 验结果。然而,现有的多目标跟踪技术仍存在一些不足之处如复杂场景下的鲁棒 性和实时性问题等需要进一步研究和改进。
31、多目标跟踪的应用领域和实 验结果
多目标跟踪技术在许多领域都有应用,如视频监控、智能交通、无人驾驶、 体育分析等。在这些应用领域中,多目标跟踪技术都取得了显著的实验结果。例 如,在智能交通领域中,多目标跟踪技术可以帮助实现车辆的精确跟踪和交通流 量的优化;在无人驾驶领域中,多目标跟踪技术可以帮助实现车辆的自主导航和 对行人的精确识别。
多目标跟踪综述
基本内容
摘要:多目标跟踪是一种重要的计算机视觉任务,旨在在视频监控、智能交 通、无人驾驶等领域中实现同时对多个目标进行跟踪和识别的功能。本次演示对 多目标跟踪的研究现状、方法及应用进行了综述,总结了研究成果与不足,并指 出了未来研究方向。关键词:多目标跟踪,计算机视觉,目标跟踪,目标识别, 综述。
2、多目标跟踪的研究现状和发展历程多目标跟踪的研究现状表明,其方法 主要分为基于滤波的方法、基于机器学习的方法和基于深度学习的方法。其中, 基于滤波的方法主要包括卡尔曼滤波、扩展卡尔曼滤波等,这类方法主要适用于 线性高斯系统,但难以处理复杂非线性系统。
视频目标跟踪算法综述

视频目标跟踪算法综述目标跟踪算法可以分为两类:基于模型的跟踪和基于特征的跟踪。
基于模型的跟踪算法通常通过建立目标的动态模型来预测目标的位置,而基于特征的跟踪算法则通过提取目标的特征信息来跟踪目标。
基于模型的跟踪算法中,最常见且经典的算法是卡尔曼滤波器算法。
该算法通过对目标位置进行状态预测,并融合传感器测量数据来更新目标的状态估计。
卡尔曼滤波器算法在目标运动较稳定且传感器测量误差较小的情况下表现良好,但在目标运动不规律或传感器测量误差较大的情况下容易出现跟踪丢失的问题。
基于特征的跟踪算法则通过提取目标的外观特征信息来跟踪目标。
常见的特征包括颜色、纹理、形状等。
其中,颜色特征是最常用的特征之一,因为它对光照变化具有一定的鲁棒性。
常见的颜色特征提取算法有颜色直方图、颜色模型等。
此外,还有一些基于纹理的特征提取算法,如Gabor滤波器、局部二值模式(LBP)等。
除了上述传统的目标跟踪算法,近年来深度学习技术的发展为目标跟踪带来了新的突破。
通过使用深度神经网络进行特征提取和目标分类,深度学习方法在目标跟踪任务上取得了很好的效果。
其中,基于卷积神经网络(CNN)的跟踪算法在目标检测和特征提取方面表现出色。
基于深度学习的目标跟踪算法通常采用两种方式进行训练:有监督学习和无监督学习。
有监督学习通过标注好的训练数据进行模型训练,而无监督学习则通过对未标注的视频序列进行训练。
近年来,基于深度学习的目标跟踪算法取得了显著的进展,并在各种跟踪性能评估指标上取得了优秀的结果。
然而,由于深度学习方法通常需要大量的数据和计算资源进行训练,因此在一些实际应用中仍然存在一定的局限性。
综上所述,视频目标跟踪是计算机视觉中的一个重要研究方向。
传统的基于模型和基于特征的跟踪算法以及近年来兴起的基于深度学习的跟踪算法为视频目标跟踪提供了不同的解决方案。
未来随着技术的不断进步,视频目标跟踪算法将不断发展,并在各种实际场景中得到更广泛的应用。
跨摄像头目标跟踪综述
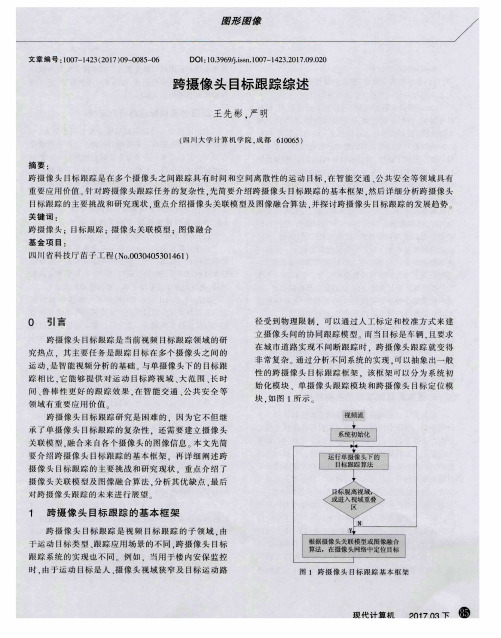
始化模块 、单摄像头跟踪模块 和跨摄像 头 目标 定位模
块. 如 图 1所 示
视频 流
跨 摄 像 头 目标 跟 踪 研 究 是 困难 的 .因 为 它 不 但 继 承 了单 摄 像 头 目标 跟 踪 的 复 杂 性 .还 需 要 建 立 摄 像 头
3 跨 摄 像 头 目标 跟踪 研 究现 状
当 前 跨 摄 像 头 目标 跟 踪 研 究 主 要 有 两 个 分 支 : 一
定 的 规 则 产 生 目标 在 当前 帧 中 的候 选 位 置 .常 见 的
是 非 重 叠 摄 像 头 跟踪 .是 指 两个 摄 像 头 之 间 的视 域 没
运 动模 型有 粒 子 滤 波 、 滑 动 窗 口和 均 值 漂 移 提 取 目标 特 征 有 两 种 方 法 .一 是 通 过 人 工 设 计 的算 法 获 得 目标 的点 、 几何形状 、 轮廓等形状特征 , 或灰 度 、 颜色、 纹理 、 梯 度 等 外 观 特 征 :二 是 利 用 机 器 学 习特 别 是 深 度 学 习 自动 获 取 边 缘 、 颜 色 等 底 层 特 征 和人 脸 、 轮 毂 等 高 层 抽 象 特 征 外 观模 型 分 为生 产模 型 和判 别 模 型 生 产 模 型 需 要 在 跟 踪 前 对 目标 外 观 ( 如形状 和纹理 ) 建模 . 然 后 在 运 动 模 型 基 于 上 一 帧 产 生 的候 选 位 置 框 中 .选 择 与 此 模 型 最 匹 配 的位 置 框 作 为 目标 在 当 前 帧 中 的位 置
对跨 摄 像 头 跟 踪 的未 来 进 行 的 基本 框 架
深度学习的目标跟踪算法综述
深度学习的目标跟踪算法综述深度学习的目标跟踪算法综述随着深度学习技术的快速发展,目标跟踪算法在计算机视觉领域发挥着重要作用。
目标跟踪旨在从视频序列中准确地跟踪并定位特定目标,并给出其轨迹。
本文将对深度学习在目标跟踪任务中的应用进行综述,简要介绍常见的目标跟踪算法和方法,并对其进行比较和分析。
一、深度学习在目标跟踪中的应用深度学习技术的高性能和强大的特征提取能力使其成为目标跟踪中的重要工具。
深度学习在目标跟踪中的应用主要包括两个方面:一是使用深度学习模型提取目标的特征,二是利用深度学习模型进行目标的跟踪。
1. 深度学习特征提取深度学习模型在计算机视觉任务中具有很强的特征提取能力,可以自动学习到图像或视频中的高级特征。
在目标跟踪任务中,常用的深度学习模型包括卷积神经网络(Convolutional Neural Network,CNN)和循环神经网络(Recurrent Neural Network,RNN)。
这些模型可以学习到目标的语义信息、空间结构和运动特征,从而提高目标跟踪算法的性能和鲁棒性。
2. 深度学习目标跟踪算法深度学习在目标跟踪算法中的应用主要包括两种方式:数据驱动方法和学习目标表示方法。
(1)数据驱动方法数据驱动方法主要通过训练深度学习模型来实现目标跟踪。
这些方法首先使用大量标注好的数据对深度学习模型进行训练,然后将训练好的模型应用于目标跟踪任务中。
其中一个常见的方法是基于卷积神经网络(CNN)的目标跟踪算法。
这种方法利用CNN模型提取图像的特征,并对特征进行分类或回归来实现目标的跟踪。
此外,还有一些基于循环神经网络(RNN)的目标跟踪算法,利用RNN模型建模目标的状态序列,通过学习目标的运动规律实现目标的跟踪。
(2)学习目标表示方法学习目标表示方法主要通过学习目标的表示来实现目标跟踪。
这些方法通过训练深度学习模型来学习目标的表示,然后使用学习好的表示进行目标跟踪。
一个常见的方法是基于Siamese 网络的目标跟踪算法。
多目标追踪综述

多目标追踪综述
说起多目标追踪,那可真是计算机视觉里头的一门大学问嘞。
简单讲,就是要让电脑能够在一堆乱糟糟的图像或者视频里头,把几个或者好多个我们关心的东西(比如人、车子这些)给盯紧了,一路跟到底,晓得它们时时刻刻都在哪儿,干啥子。
这活儿听起来简单,做起来可不容易。
你想嘛,图像里头的东西那么多,光线啊、角度啊、速度啊,哪个不变嘛?还有那些突然冒出来的障碍物,或者是目标自己突然变了个方向,这都不得不让电脑重新动动脑筋,调整下策略。
所以嘞,搞多目标追踪的科学家们,就发明了好多方法来应对这些问题。
比如说,有的方法会先给每个目标建个模型,然后根据这个模型在图像里头找;还有的方法呢,会利用目标之间的关系,比如哪个离哪个近点,哪个走得快点,来帮忙追踪。
更高级的,还会用到深度学习这些新技术,让电脑自己从大量的数据里头学习怎么追踪最好。
当然咯,现在这些方法都还在不断地改进和完善当中。
毕竟嘛,真实世界的情况太复杂了,要想让电脑真正做到像人一样,一眼就能看出好多东西来,并且一路跟到底,那还得花不少功夫嘞。
不过,相信随着技术的不断进步,多目标追踪这门学问肯定会越来越厉害,给我们带来更多的惊喜和便利。
多模态目标跟踪综述
多模态目标跟踪是计算机视觉领域的一个重要研究方向,它涉及到多个模态数据(如视频、图像、激光雷达等)的联合处理,旨在实现对目标对象的实时跟踪。
随着人工智能技术的发展,多模态目标跟踪已经成为了许多实际应用的关键技术,如自动驾驶、智能监控、机器人等领域。
本文将对多模态目标跟踪的综述进行阐述。
多模态目标跟踪的主要挑战包括数据融合、模型设计、算法优化等方面。
首先,数据融合是多模态目标跟踪的核心问题之一,它涉及到如何将不同模态的数据进行有效的整合,以便更准确地识别和跟踪目标。
例如,视频和图像数据可以提供目标的外观信息,而激光雷达数据可以提供目标的运动信息。
其次,模型设计是实现多模态目标跟踪的关键,它需要根据不同的模态数据特点,设计相应的跟踪算法和模型结构。
最后,算法优化也是实现高精度、高鲁棒性的多模态目标跟踪的重要手段,包括优化算法参数、改进模型性能等方面。
针对多模态目标跟踪的问题,目前已经提出了许多不同的方法和算法。
其中,基于滤波器的跟踪算法是一种常用的方法,它通过建立目标状态的概率模型,对目标位置和速度进行估计。
基于深度学习的跟踪算法也是近年来兴起的一种方法,它通过利用卷积神经网络(CNN)等深度学习模型对目标特征进行学习,实现对目标的实时跟踪。
此外,还有一些基于光流场的方法、基于稠密预测的方法等,这些方法各有优缺点,需要根据实际应用场景和数据特点进行选择。
多模态目标跟踪的应用场景非常广泛,包括但不限于自动驾驶、智能监控、机器人等领域。
在自动驾驶中,多模态目标跟踪可以帮助车辆识别和跟踪道路上的行人、车辆等目标对象,提高自动驾驶的安全性和可靠性。
在智能监控中,多模态目标跟踪可以帮助实时监测和分析视频中的目标行为,实现智能分析和预警。
在机器人领域中,多模态目标跟踪可以帮助机器人实现对周围环境的感知和理解,提高机器人的自主性和智能化水平。
未来多模态目标跟踪的研究方向包括更加智能化、更加高效化、更加鲁棒化的方法。
视觉多目标跟踪综述
视觉多目标跟踪综述下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by the editor. I hope that after you download them, they can help yousolve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts,other materials and so on, want to know different data formats and writing methods, please pay attention!视觉多目标跟踪是计算机视觉领域中的一个重要研究方向,它旨在实现对场景中多个目标的同时跟踪和识别。
图像处理中的目标跟踪方法综述
图像处理中的目标跟踪方法综述目标跟踪是计算机视觉领域的一个重要研究方向,旨在从图像序列中实时追踪一个或多个目标。
目标跟踪在各种应用中都有广泛的应用,如视频监控、自动驾驶、虚拟现实等。
本文将综述目标跟踪领域涉及的一些主要方法和技术。
1. 基于特征提取的目标跟踪方法基于特征提取的目标跟踪方法通过提取目标区域的特征来进行目标跟踪。
其中,颜色特征是最常用的一种特征,可以通过计算目标区域的颜色直方图或使用颜色模型来表示。
此外,纹理特征、边缘特征和形状特征等也可以用来描述目标。
2. 基于相关滤波的目标跟踪方法相关滤波是一种常用的目标跟踪方法,它通过计算目标模板和候选区域之间的相关性来进行目标跟踪。
常见的相关滤波方法包括均方差滤波和归一化相关滤波。
这些方法在一定程度上可以提高目标跟踪的准确性和鲁棒性。
3. 基于机器学习的目标跟踪方法机器学习在目标跟踪中的应用越来越广泛,其中最常见的方法是在线学习。
在线学习可以根据当前跟踪结果和新的训练样本来不断更新目标模型,从而实现自适应的目标跟踪。
常见的在线学习方法包括增量学习、在线支持向量机和在线随机森林等。
4. 基于深度学习的目标跟踪方法深度学习是目前计算机视觉和图像处理领域的热门技术,也在目标跟踪中取得了显著的成果。
深度学习方法通过卷积神经网络(CNN)来学习目标的特征表示,并利用循环神经网络(RNN)或卷积神经网络来预测目标的位置。
这些方法在目标跟踪的准确性和鲁棒性方面表现出色。
5. 基于多特征融合的目标跟踪方法多特征融合是提高目标跟踪性能的一种常用策略。
它可以将不同尺度、不同特征的信息进行融合,从而提高目标跟踪的准确性和鲁棒性。
常见的多特征融合方法包括特征加权、特征选择和特征级联等。
综上所述,目标跟踪在图像处理中扮演着重要的角色。
各种方法和技术的不断发展与创新,为目标跟踪的准确性和鲁棒性提供了更高的要求和更多的可能性。
因此,我们可以期望在未来的研究中会出现更多有效的目标跟踪方法,为各种应用提供更好的解决方案。
目标跟踪技术综述
第7卷 第3期2014年6月 中国光学 Chinese Optics Vol.7 No.3 Jun.2014 收稿日期:2013⁃10⁃11;修订日期:2014⁃02⁃13 基金项目:中国科学院航空光学成像与测量重点实验室开放基金资助项目(No.Y2HC1SR121)文章编号 2095⁃1531(2014)03⁃0365⁃11目标跟踪技术综述高 文1,2∗,朱 明1,贺柏根1,吴笑天1(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;2.中国科学院航空光学成像与测量重点实验室,吉林长春130033)摘要:本文回顾了视频目标跟踪方法中常用的目标表示方法,并对目标表示方法进行了系统地分类,对现有的目标跟踪方法进行了分类,并对每类中具有代表性的方法进行了详细描述,分析各类别的优缺点。
讨论了目标跟踪的难点以及未来的发展趋势,为相关研究人员了解目标跟踪技术提供参考。
关 键 词:目标跟踪;综述;SIFT ;Meanshift中图分类号:TP394.1 文献标识码:A doi:10.3788/CO.20140703.0365Overview of target tracking technologyGAO Wen 1,2∗,ZHU Ming 1,HE Bai⁃gen 1,WU Xiao⁃tian 1(1.Changchun Institute of Optics ,Fine Mechanics and Physics ,Chinese Academy of Sciences ,Changchun 130033,China ;2.Key Laboratory of Airborne Optical Imaging and Measurement ,Chinese Academy of Sciences ,Changchun 130033,China )∗Corresponding author ,E⁃mail :cwenzi@ Abstract :In this article,we review the favorite target representation in target tracking,and dassify them sys⁃tematically,then categorize the target tracking methods used at present on the basis of the object and motion representations,provide detailed descriptions of representative methods in each category,and examine their pros and cons.Moreover,we discuss the difficulties and future trend of target tracking.Key words :target tracking;survey;SIFT;meanshift1 引 言 目标跟踪技术一直是计算机视觉研究领域中的热点之一,其在军事侦察、精确制导、火力打击、战场评估以及安防监控等诸多方面均有广泛的应用前景。
目标跟踪方法综述
目标跟踪方法综述今天,贯穿计算机视觉领域的一个重要技术是目标跟踪。
它允许计算机从连续的帧中获取当前位置的数据,以用于分析和定位。
目标跟踪的本质是“跟踪目标”,这意味着计算机需要一种能够捕捉到目标特征的方法,并以追踪那些特征以及后续更新这些特征的方法来实现。
本文将介绍目前已经提出的不同目标跟踪方法,讨论它们的特点和优缺点,探讨它们的优化和发展,并分析它们在不同场景中的应用,以期为业界提供参考。
简单来说,目标跟踪可以分为两大类:基于模板匹配的跟踪方法和基于分数的跟踪方法。
基于模板匹配的跟踪方法依赖于目标的模板信息,其通过比较模板图像和当前帧图像中的空间分布关系来实现有效的目标检测与跟踪。
目前,基于模板匹配的跟踪算法主要分为Kernel-based Tracking(KBT)、Lucas-Kanade Tracking(LK)和Mean-Shift Tracking(MST)三种。
Kernel-based Tracking是一种基于核函数的跟踪算法,其主要思想是将目标的模板和当前帧的图像投影到核空间中,通过核函数的“软”匹配来实现目标的有效定位。
Lucas-Kanade Tracking则采用仿射变换参数捕获目标在连续帧中的空间变化,其主要思想是比较前后两帧之间的光流变化,以找出无限近似值,并结合卡尔曼滤波以实现有效地跟踪。
MST(Mean-Shift Tracking)是一种基于模板跟踪的跟踪算法,其将图像分割为不同的颜色区域,利用均值漂移来跟踪每一个颜色区域,它的特点是不需要进行额外的模板匹配来捕捉目标特征。
另一类目标跟踪方法是基于分数的跟踪方法,它主要依赖于特征分数技术,如HOG(Histogram of Oriented Gradients)和SIFT(Scale-Invariant Feature Transform)等,来捕捉目标特征。
这类算法能够较好地处理目标快速运动和变形等复杂情况。
传统的基于分数的跟踪算法主要有雅克比跟踪(Jakobian Tracking)和稠密跟踪(Dense Tracking)。