【CN110203208A】一种具有多冗余安全机制的车辆自动驾驶控制系统【专利】
一种自动驾驶冗余控制系统[发明专利]
![一种自动驾驶冗余控制系统[发明专利]](https://img.taocdn.com/s3/m/1e287930a31614791711cc7931b765ce05087a69.png)
专利名称:一种自动驾驶冗余控制系统
专利类型:发明专利
发明人:陈国迎,郑修磊,赵选铭,高振海,姚军申请号:CN202111550051.8
申请日:20211217
公开号:CN114084158A
公开日:
20220225
专利内容由知识产权出版社提供
摘要:本发明涉及自动驾驶技术领域,具体是一种自动驾驶冗余控制系统,自动驾驶域控制器的路径跟踪部分失效时冗余系统为车辆提供冗余跟踪控制功能,自动驾驶域控制器完全失效时冗余系统完全接管车辆,并使车辆快速并入最右侧车道并停车,跟踪控制器通过变预瞄距离的纯跟踪控制器实现车辆的循迹功能;规划过程中,通过前置摄像头得到的环境信息建立考虑运动学约束的安全走廊规划方法,生成平滑的换道路径,并跟踪换道。
本发明自动驾驶冗余控制系统,通过在车辆底盘域控制器加入冗余控制系统,降低自动驾驶等级,使车辆仅依靠当前传感器、线控底盘,缓速行驶到路边后停车,提高了车辆的安全性能,使用十分方便。
申请人:吉林大学
地址:130012 吉林省长春市前进大街2699号
国籍:CN
代理机构:北京专赢专利代理有限公司
代理人:孟文梁
更多信息请下载全文后查看。
【CN110232836A】物体识别装置以及车辆行驶控制系统【专利】
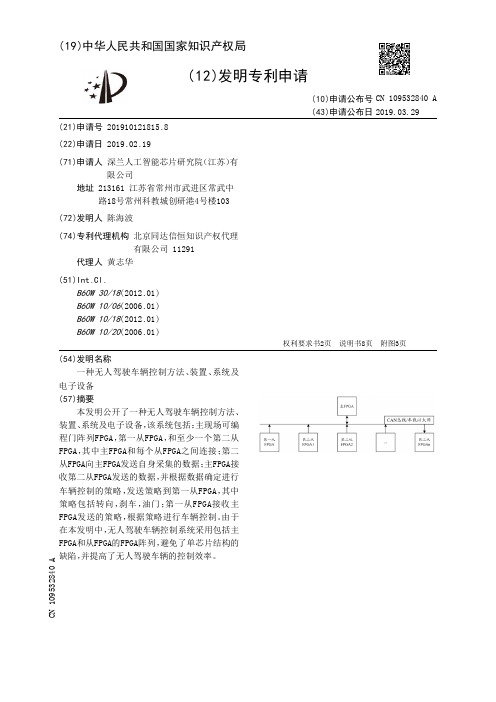
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910167261.5(22)申请日 2019.03.06(30)优先权数据2018-039807 2018.03.06 JP(71)申请人 丰田自动车株式会社地址 日本爱知县(72)发明人 小泽纯 永田真一 (74)专利代理机构 北京集佳知识产权代理有限公司 11227代理人 李洋 王培超(51)Int.Cl.G08G 1/16(2006.01)B60R 21/01(2006.01)(54)发明名称物体识别装置以及车辆行驶控制系统(57)摘要一种即使在使用光学特性不同的多个照相机的情况下也能够高精度地实施融合处理的物体识别装置以及车辆行驶控制系统。
搭载于车辆的物体识别装置具备第1照相机、具有与第1照相机不同的光学特性的第2照相机、以及测距传感器。
分别由第1照相机、第2照相机、以及测距传感器检测到的物体是第1物体、第2物体、第3物体。
在融合处理中,物体识别装置使用针对各物体的检测位置设定的判定范围。
与第1物体的检测位置有关的判定范围随着检测到的第1物体的像素密度变低而被设定得大。
与第2物体的检测位置有关的判定范围随着检测到的第2物体的像素密度变低而被设定得大。
权利要求书1页 说明书8页 附图8页CN 110232836 A 2019.09.13C N 110232836A权 利 要 求 书1/1页CN 110232836 A1.一种物体识别装置,搭载于车辆,其中,具备:第1照相机;第2照相机,其具有与所述第1照相机不同的光学特性;测距传感器,其包括雷达以及激光雷达的至少一方;以及控制装置,其进行物体识别处理,所述物体识别处理包括:物体检测处理,其中,基于所述第1照相机的拍摄结果对第1物体进行检测,基于所述第2照相机的拍摄结果对第2物体进行检测,并且基于所述测距传感器的计测结果对第3物体进行检测;判定范围设定处理,其中,针对所述第1物体的检测位置设定第1判定范围,针对所述第2物体的检测位置设定第2判定范围,并且针对所述第3物体的检测位置设定第3判定范围;以及融合处理,其中,将所述第3判定范围与所述第1判定范围以及所述第2判定范围进行对比,在判定为所述第3物体与所述第1物体以及所述第2物体的至少一方相同的情况下,将所述第3物体与所述至少一方识别为同一物体,所述第1物体的像素密度亦即第1像素密度是基于所述第1物体的检测距离、所述第1照相机的视角以及像素数而决定的,所述第2物体的像素密度亦即第2像素密度是基于所述第2物体的检测距离、所述第2照相机的视角以及像素数而决定的,在所述判定范围设定处理中,所述控制装置随着所述第1像素密度变低而将所述第1判定范围设定得大,另外随着所述第2像素密度变低而将所述第2判定范围设定得大。
【CN109532840A】一种无人驾驶车辆控制方法、装置、系统及电子设备【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910121815.8(22)申请日 2019.02.19(71)申请人 深兰人工智能芯片研究院(江苏)有限公司地址 213161 江苏省常州市武进区常武中路18号常州科教城创研港4号楼103(72)发明人 陈海波 (74)专利代理机构 北京同达信恒知识产权代理有限公司 11291代理人 黄志华(51)Int.Cl.B60W 30/18(2012.01)B60W 10/06(2006.01)B60W 10/18(2012.01)B60W 10/20(2006.01)(54)发明名称一种无人驾驶车辆控制方法、装置、系统及电子设备(57)摘要本发明公开了一种无人驾驶车辆控制方法、装置、系统及电子设备,该系统包括:主现场可编程门阵列FPGA,第一从FPGA,和至少一个第二从FPGA,其中主FPGA和每个从FPGA之间连接;第二从FPGA向主FPGA发送自身采集的数据;主FPGA接收第二从FPGA发送的数据,并根据数据确定进行车辆控制的策略,发送策略到第一从FPGA,其中策略包括转向,刹车,油门;第一从FPGA接收主FPGA发送的策略,根据策略进行车辆控制。
由于在本发明中,无人驾驶车辆控制系统采用包括主FPGA和从FPGA的FPGA阵列,避免了单芯片结构的缺陷,并提高了无人驾驶车辆的控制效率。
权利要求书2页 说明书8页 附图3页CN 109532840 A 2019.03.29C N 109532840A权 利 要 求 书1/2页CN 109532840 A1.一种无人驾驶车辆控制系统,其特征在于,所述系统包括:主现场可编程门阵列FPGA,第一从FPGA,和至少一个第二从FPGA,其中所述主FPGA和每个从FPGA之间连接;所述第二从FPGA,用于向所述主FPGA发送自身采集的数据;所述主FPGA,用于接收所述第二从FPGA发送的所述数据,并根据所述数据确定进行车辆控制的策略,发送所述策略到所述第一从FPGA,其中所述策略包括转向,刹车,油门;所述第一从FPGA,用于接收所述主FPGA发送的所述策略,根据所述策略进行车辆控制。
自动驾驶汽车安全双重冗余设计技术

自动驾驶汽车安全双重冗余设计技术随着科技的不断进步,自动驾驶汽车正逐渐成为现实。
然而,安全性一直是自动驾驶汽车发展的关键问题之一。
为了确保自动驾驶汽车在道路上的安全行驶,安全双重冗余设计技术应运而生。
安全双重冗余设计技术是指在自动驾驶汽车的各个关键系统中引入冗余设计,以增强系统的可靠性和安全性。
具体来说,这项技术通过使用两套完全独立的系统来执行相同的任务,从而实现双重冗余。
当其中一套系统发生故障或出现问题时,另一套系统可以立即接管,确保汽车的正常运行。
为了实现安全双重冗余设计技术,自动驾驶汽车会配备多个传感器和控制系统。
传感器包括激光雷达、摄像头、雷达和超声波传感器等,它们用于感知周围环境和检测障碍物。
而控制系统则负责分析传感器数据,并做出相应的决策和控制。
在传感器方面,安全双重冗余设计技术要求使用两套不同类型的传感器进行冗余。
这样一来,即使其中一种传感器失效,另一种传感器仍然可以继续工作,确保对周围环境的准确感知。
例如,激光雷达和摄像头可以同时用于障碍物识别,如果其中一种传感器失灵,另一种仍然可以提供必要的信息。
在控制系统方面,安全双重冗余设计技术要求采用两套独立的算法和决策系统。
这样可以避免单一系统的失效影响自动驾驶汽车的正常运行。
当其中一套系统出现问题时,另一套系统会立即接管,并做出正确的决策,以确保车辆的安全行驶。
此外,为了进一步提升安全性,自动驾驶汽车还应配备适当的监控和报警系统。
这些系统可以实时监测传感器和控制系统的状态,并在发现异常情况时发出警报。
例如,如果某个传感器异常或控制系统出现错误,监控系统会发出警报提示驾驶员或者自动停车,避免潜在的危险。
总之,安全双重冗余设计技术是保障自动驾驶汽车安全的重要技术之一。
通过引入双重冗余的传感器和控制系统,以及监控和报警系统,可以大幅提高自动驾驶汽车的可靠性和安全性。
未来,随着技术的不断进步和创新,自动驾驶汽车有望成为我们出行的新选择,而安全双重冗余设计技术将为此发展提供坚实的保障。
【CN209366141U】一种自带冗余功能的司机控制器【专利】
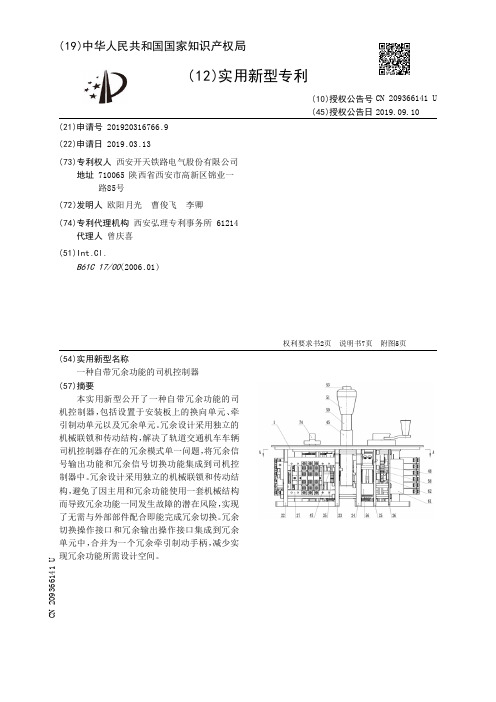
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920316766.9(22)申请日 2019.03.13(73)专利权人 西安开天铁路电气股份有限公司地址 710065 陕西省西安市高新区锦业一路85号(72)发明人 欧阳月光 曹俊飞 李卿 (74)专利代理机构 西安弘理专利事务所 61214代理人 曾庆喜(51)Int.Cl.B61C 17/00(2006.01)(54)实用新型名称一种自带冗余功能的司机控制器(57)摘要本实用新型公开了一种自带冗余功能的司机控制器,包括设置于安装板上的换向单元、牵引制动单元以及冗余单元。
冗余设计采用独立的机械联锁和传动结构,解决了轨道交通机车车辆司机控制器存在的冗余模式单一问题,将冗余信号输出功能和冗余信号切换功能集成到司机控制器中。
冗余设计采用独立的机械联锁和传动结构,避免了因主用和冗余功能使用一套机械结构而导致冗余功能一同发生故障的潜在风险,实现了无需与外部部件配合即能完成冗余切换。
冗余切换操作接口和冗余输出操作接口集成到冗余单元中,合并为一个冗余牵引制动手柄,减少实现冗余功能所需设计空间。
权利要求书2页 说明书7页 附图5页CN 209366141 U 2019.09.10C N 209366141U权 利 要 求 书1/2页CN 209366141 U1.一种自带冗余功能的司机控制器,其特征在于,包括设置于安装板(1)上的换向单元(2)、牵引制动单元(3)以及冗余单元(4);所述换向单元(2)包括设置于安装板(1)下端面的换向上板(5),所述换向上板(5)上端面通过紧固件固定有凸出于安装板(1)的换向座(6),所述换向座(6)内安装有可转动的换向手柄(7),所述换向上板(5)下端面通过紧固件并排固定换向开关架(8)、换向固定柱(9)的一端,所述换向开关架(8)和换向固定柱(9)另一端通过紧固件固定有换向下板(10),所述换向开关架(8)外侧固定有换向速动开关(11),所述换向上板(5)和换向下板(10)之间并可转动设置有换向凸轮组件(12)、联锁架组件(13)和换向定位组件(14),所述换向凸轮组件(12)包含与其中心轴同轴并层叠固定的换向凸轮(15)、换向定位棘轮(16)和换向联锁棘轮(17),所述换向定位组件(14)中的换向定位滚轮(18)通过弹性元件压向换向定位棘轮(16)的外沿,使换向定位棘轮(16)和换向定位滚轮(18)保持啮合;所述联锁架组件(13)中的换向联锁滚轮(21)压在换向联锁棘轮(17)的外沿与其保持啮合;所述牵引制动单元(3)包括设置于安装板(1)下端面的第一侧板(22)、第二侧板(23)、第三侧板(24)、第四侧板(25)和第五侧板(26),所述第一侧板(22)和第二侧板(23)通过呈上下设置的第一固定柱(28)和主用开关架(27)连接,所述主用开关架(27)上通过紧固件固定有主用牵引制动速动开关(29),所述第一侧板(22) 上有可转动的主用定位组件(30),所述第二侧板(23)上通过紧固件固定有第一冗余联锁座(31),所述第一侧板(22)和第二侧板(23)之间可转动设置有主用凸轮组件(32),所述主用凸轮组件(32)包含与其中心轴同轴并层叠固定的主用牵引制动凸轮(33)和主用从动齿轮(35),伸出所述第一侧板(22)的主用凸轮组件(32)中心轴上固定有主用定位棘轮(34),所述主用定位组件(30)中的主用定位滚轮(36)通过弹性元件压向主用定位棘轮(34)外沿,使主用定位棘轮(34)和主用定位滚轮(36)保持啮合;所述第二侧板(23)和第三侧板(24)之间通过第二固定柱(37)固定,所述第三侧板(24)朝向第二侧板(23)的一侧通过紧固件固定有主联锁座(38)、第二冗余联锁座(39)和牵引锁定挡块(40),所述主联锁座(38)内设置有可轴向运动的主联锁轴(41),所述主联锁轴(41)外套有主联锁簧(42),所述主联锁簧(42)将套在其内的主联锁轴(41)压向固定在联锁架组件(13)中的主联锁滚轮(19),使同样固定在联锁架组件(13)中的换向联锁滚轮(21)压在换向联锁棘轮(17)的外沿上,还包括第二冗余联锁座(39)和第一冗余联锁座(31),位于所述第二冗余联锁座(39)与第一冗余联锁座(31)之间的冗余联锁轴(43)外部套有冗余联锁簧(44),所述冗余联锁簧(44)将套在其内的冗余联锁轴(43)压向固定在联锁架组件(13)中的冗余联锁滚轮(20);所述第二侧板(23)和第三侧板(24)间含可转动的主手柄座组件(45),所述主手柄座组件(45)包括手柄转轴(46),所述手柄转轴(46)被轴向固定在第二侧板(23)和第三侧板(24)之间并可转动,所述手柄转轴(46)伸出第二侧板(23)和第三侧板(24)的部分分别通过紧固件固定有第一主动齿轮(47)和第二主动齿轮(48),所述第一主动齿轮(47)与固定在主用凸轮组件(32)中的主用从动齿轮(35)啮合,所述手柄转轴(46)中部含法兰结构并通过紧固件固定有手轮(49),所述手轮(49)上端固定有手柄杆(50),手柄杆(50)穿出安装板(1)上端面,所述手柄杆(50)上端固定有主用牵引制动手柄(51),所述手柄杆(50)内部有可轴向运动并通过弹簧向上自复的按钮轴(52),所述按钮轴(52)上端固定有牵引防误动按钮(53),2。
【CN110239508A】一种车辆控制方法、车辆控制系统及具有该系统的车辆【专利】
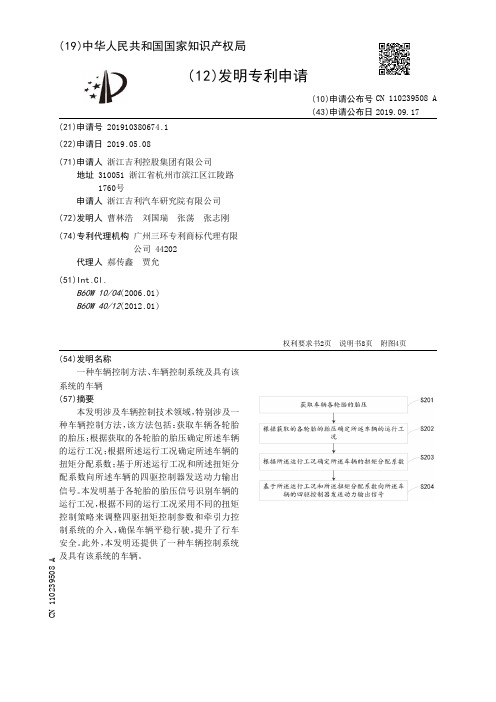
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910380674.1(22)申请日 2019.05.08(71)申请人 浙江吉利控股集团有限公司地址 310051 浙江省杭州市滨江区江陵路1760号申请人 浙江吉利汽车研究院有限公司(72)发明人 曹林浩 刘国瑞 张荡 张志刚 (74)专利代理机构 广州三环专利商标代理有限公司 44202代理人 郝传鑫 贾允(51)Int.Cl.B60W 10/04(2006.01)B60W 40/12(2012.01)(54)发明名称一种车辆控制方法、车辆控制系统及具有该系统的车辆(57)摘要本发明涉及车辆控制技术领域,特别涉及一种车辆控制方法,该方法包括:获取车辆各轮胎的胎压;根据获取的各轮胎的胎压确定所述车辆的运行工况;根据所述运行工况确定所述车辆的扭矩分配系数;基于所述运行工况和所述扭矩分配系数向所述车辆的四驱控制器发送动力输出信号。
本发明基于各轮胎的胎压信号识别车辆的运行工况,根据不同的运行工况采用不同的扭矩控制策略来调整四驱扭矩控制参数和牵引力控制系统的介入,确保车辆平稳行驶,提升了行车安全。
此外,本发明还提供了一种车辆控制系统及具有该系统的车辆。
权利要求书2页 说明书8页 附图4页CN 110239508 A 2019.09.17C N 110239508A权 利 要 求 书1/2页CN 110239508 A1.一种车辆控制方法,其特征在于,包括:获取车辆各轮胎的胎压;根据获取的各轮胎的胎压确定所述车辆的运行工况;根据所述运行工况确定所述车辆的扭矩分配系数;基于所述运行工况和所述扭矩分配系数向所述车辆的四驱控制器发送动力输出信号。
2.根据权利要求1所述的方法,其特征在于,所述根据获取的各轮胎的胎压确定所述车辆的运行工况包括:将获取的各轮胎的胎压与预设的第一胎压阈值进行比较;如果至少一个轮胎的胎压高于所述第一胎压阈值,判定所述车辆的运行工况为跛行控制工况;如果各轮胎的胎压均不高于所述第一胎压阈值,计算各轮胎的胎压变化率;将各轮胎的胎压与预设的胎压阈值范围进行比较,将各轮胎的胎压变化率与预设的变化率阈值进行比较;如果各轮胎的胎压均处于所述胎压阈值范围,且各轮胎的胎压变化率均小于所述变化率阈值,判定所述车辆的运行工况为稳定控制工况;如果至少一个轮胎的胎压超出所述胎压阈值范围,且至少一个轮胎的胎压变化率不小于所述变化率阈值,判定所述车辆的运行工况为预爆胎控制工况。
【CN109782579A】一种基于冗余架构的分布式运载火箭控制系统【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910188075.X(22)申请日 2019.03.13(71)申请人 重庆零壹空间航天科技有限公司地址 401135 重庆市渝北区龙兴镇迎龙大道19号(72)发明人 张晓飞 张伟 舒畅 马超 程越巍 彭偲 黄侃 刘志方 郝文倩 闫浩正 郭慧婷 商家宁 戴龙鹏 鄢爽平 (74)专利代理机构 天津市鼎拓知识产权代理有限公司 12233代理人 朱丽丽(51)Int.Cl.G05B 9/03(2006.01)(54)发明名称一种基于冗余架构的分布式运载火箭控制系统(57)摘要本申请提供有一种基于冗余架构的分布式运载火箭控制系统。
基于分布式控制系统的设计,由数据总线代替集中控制系统中数量众多的穿舱电缆,能够显著地减少运载火箭上电缆分布支数和重量。
还由于引入了终端计算机和总线设计,不仅降低了主控计算机的计算和测控压力,也提高了系统可扩展性。
此外,基于冗余架构的分布式控制系统的设计中,还通过多路总线结构实现了主控计算机与备份主控计算机、终端计算机与备份终端计算机的冗余控制,大大地提高系统的可靠性。
权利要求书1页 说明书4页 附图3页CN 109782579 A 2019.05.21C N 109782579A权 利 要 求 书1/1页CN 109782579 A1.一种基于冗余架构的分布式运载火箭控制系统,其特征在于:包括:主控计算机和至少一个终端计算机;所述主控计算机与所述终端计算机通过总线连接;所述主控计算机包括:第一控制模块,与第一控制模块电连接的第一采集模块,第一时序模块,第一通讯模块和第一电源模块;所述终端计算机包括:第二控制模块,与第二控制模块电连接的第二采集模块,第二时序模块,第二通讯模块和第二电源模块;所述第一控制模块用于监测第二控制模块的运行状态数据;所述第一通讯模块与所述第二通讯模块通过总线连接。
一种冗余的自动驾驶系统及其控制方法[发明专利]
专利名称:一种冗余的自动驾驶系统及其控制方法专利类型:发明专利
发明人:陈诚,张旸,刘洁
申请号:CN202010470594.8
申请日:20200528
公开号:CN111371662A
公开日:
20200703
专利内容由知识产权出版社提供
摘要:本发明公开了一种冗余的自动驾驶系统及其控制方法,该系统包括域控制器和主控单元,所述域控制器包括处理器和以太网交换机,用于与车身CAN网络进行数据交换,以及感知传感器数据进行前置处理;所述主控单元不少于两个,均设置外部接口和内部互联接口,通过外部接口实现主控单元与域控制器以及车身CAN网络的连接,通过内部互联接口实现主控单元之间的连接,用于分析传感器和车身CAN网络的数据,进行车身冗余控制。
本发明设置多个主控单元,当任意一个主控单元失效时,其余主控单元仍然可以正常工作,给予了车辆充分的能力进行异常处理。
申请人:奥特酷智能科技(南京)有限公司
地址:211800 江苏省南京市浦口区桥林街道步月路29号12幢-289
国籍:CN
代理机构:南京行高知识产权代理有限公司
代理人:李晓
更多信息请下载全文后查看。
【CN110356234A】具有冗余的车辆供电系统和用于控制供电系统的方法【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910220535.2(22)申请日 2019.03.22(30)优先权数据18163842.0 2018.03.26 EP(71)申请人 沃尔沃汽车公司地址 瑞典哥德堡(72)发明人 A ·瓦纳尔哈弗 F ·福格尔贝里 (74)专利代理机构 永新专利商标代理有限公司72002代理人 刘瑜 王英(51)Int.Cl.B60L 3/00(2019.01)B60L 58/18(2019.01)B60L 58/10(2019.01)B60L 1/00(2006.01)(54)发明名称具有冗余的车辆供电系统和用于控制供电系统的方法(57)摘要一种用于车辆的供电系统(100),该系统包括:电池组(102),包括至少两个并联的电池单元串,每个串形成具有第一输出电压的电池(104a -b);开关机构(106、108),被配置为将所述至少两个电池中的一个连接到第一电池组输出端子(110),其中所述第一电池组输出端子连接到第一功率消耗器(112);以及多通道DC/DC转换器(114),具有连接到第一电池组输出端子的输入端子(116),多通道DC/DC转换器包括多个输出(118a -d),其中多个输出中的至少一个输出被配置为提供第二电压,第二电压低于第一电压,并且其中多通道DC/DC转换器的至少一个输出连接到第二功率消耗器(120、122)。
权利要求书2页 说明书5页 附图3页CN 110356234 A 2019.10.22C N 110356234A权 利 要 求 书1/2页CN 110356234 A1.一种用于车辆的供电系统(100),所述系统包括:电池组(102),其包括至少两个并联的电池单元串,每个串形成具有第一输出电压的电池(104a-b);开关机构(106、108),其被配置为将所述至少两个电池中的一个连接到第一电池组输出端子(110),其中,所述第一电池组输出端子连接到第一功率消耗器(112);以及多通道DC/DC转换器(114),其具有连接到所述第一电池组输出端子的输入端子(116),所述多通道DC/DC转换器包括多个输出(118a-d),其中,多个输出中的至少一个输出被配置为提供第二电压,所述第二电压低于所述第一电压,并且其中,所述多通道DC/DC转换器的至少一个输出连接到第二功率消耗器(120、122)。
【CN209426576U】一种具有冗余备份功能的汽车驻车系统【专利】
代理人 唐清凯
(51)Int .Cl . B60L 3/00(2019 .01) B60L 15/20(2006 .01) B60L 15/32(2006 .01)
( ESM )同样的发明创造已同日申请发明专利
(10)授权公告号 CN 209426576 U (45)授权公告日 2019.09.24
( 19 )中华人民 共和国国家知识产权局
( 128618 .5
(22)申请日 2019 .01 .10
(73)专利权人 苏州萨克汽车科技有限公司 地址 215123 江苏省苏州市苏州工业园区 星湖街328号创意产业园11-304单元
(72)发明人 陈箭 祁富伟 高鹏 朱鹏昊
2
CN 209426576 U
说 明 书
1/9 页
一种具有冗余备份功能的汽车驻车系统
技术领域 [0001] 本实用新型涉及车辆驻车技术领域,特别是涉及一种具有冗余备份功能的汽车驻 车系统。
背景技术 [0002] 在传统车辆中,通常具有P档锁止机构(该结构可以保证驾驶员在挂入P档时将变 速箱锁住 ,从而实现驻车) 和驻车系统 ,通过这两套系统实现车辆的驻车 ,但是基于整车布 置及成本等的考虑,目前众多新能源汽车取消了P档锁止机构,这样整车就剩下一套驻车系 统可以实现驻车,无法满足法规GB21670中4 .2 .19 .2的要求,存在安全隐患。 [0003] 从目前驻车系统的发展趋势来看,解决上述问题的途径之一就是为驻车控制器设 计一套备份系统 ,以 提高驻车控制器的 安全性能。但是 ,原有P档锁止机构和驻车系统是完 全独立的 两套系统 ,具有完全不同的 外部输入 ,仅从内部提高驻车控制器的 安全性能不足 以完全解决系统存在的安全隐患。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910367196.0
(22)申请日 2019.05.05
(71)申请人 上海思致汽车工程技术有限公司
地址 201108 上海市闵行区金都路3669号6
幢1层B14室
(72)发明人 范化明 杜梦贤 吴超 陈幸
(74)专利代理机构 上海科盛知识产权代理有限
公司 31225
代理人 赵继明
(51)Int.Cl.
B60W 50/00(2006.01)
B60W 50/029(2012.01)
(54)发明名称
一种具有多冗余安全机制的车辆自动驾驶
控制系统
(57)摘要
本发明涉及一种具有多冗余安全机制的车
辆自动驾驶控制系统,包括视觉模块、激光雷达
模块、毫米波雷达模块、超声波模块、中央控制
器、地图模块和分布在车身的多组传感器单元,
各传感器单元分别与对应的模块连接,各模块通
过以太网直接或间接互联互通,并均与中央控制
器相连,当某一个模块发生故障时,其他模块可
绕过该故障模块通过其他链路将信息传给中央
控制器,实现系统的正常工作。
与现有技术相比,
本发明系统中某个传感器或某个功能模块失效
时,系统可通过多套冗余机制快速完成正常工作
配置,不影响自动驾驶功能,从而实现汽车更安
全更可靠的行驶。
权利要求书1页 说明书3页 附图1页CN 110203208 A 2019.09.06
C N 110203208
A
权 利 要 求 书1/1页CN 110203208 A
1.一种具有多冗余安全机制的车辆自动驾驶控制系统,其特征在于,包括视觉模块、激光雷达模块、毫米波雷达模块、超声波模块、中央控制器、地图模块和分布在车身的多组传感器单元,所述的传感器单元分别与对应的模块连接,各模块通过以太网直接或间接互联互通,并均与中央控制器相连,当某一个模块发生故障时,其他模块可绕过该故障模块通过其他链路将信息传给中央控制器,实现系统的正常工作。
2.根据权利要求1所述的一种具有多冗余安全机制的车辆自动驾驶控制系统,其特征在于,所述的传感器单元内包含激光雷达、毫米波雷达、超声波雷达、多功能摄像头、环视摄像头、高精地图、GPS和IMU。
3.根据权利要求2所述的一种具有多冗余安全机制的车辆自动驾驶控制系统,其特征在于,所述的多功能摄像头为单目或多目摄像头。
4.根据权利要求1所述的一种具有多冗余安全机制的车辆自动驾驶控制系统,其特征在于,所述的传感器单元设有六组,分别设置在车身的正前方、前左、前右、正后方、后左和后右位置。
5.根据权利要求1所述的一种具有多冗余安全机制的车辆自动驾驶控制系统,其特征在于,所述的系统还包括ESP及EPS模块。
6.根据权利要求5所述的一种具有多冗余安全机制的车辆自动驾驶控制系统,其特征在于,正常情况下由中央控制器发出指令并要求EPS及EPS模块执行指令,当中央控制器模块发生故障时,其他模块均可实现对EPS及EPS模块的控制,从而实现Fall Back功能。
7.根据权利要求1所述的一种具有多冗余安全机制的车辆自动驾驶控制系统,其特征在于,所述的系统还包括驾驶员监控摄像头和驾驶员监控模块。
2。