MODBUS3.0 照明信号
K-MOD01 DPModBus网桥通讯模块使用说明书

HOLLiAS MACS -K系列模块2014年5月B版HOLLiAS MAC-K系列手册- K-MOD01 DP/Modbus网桥通讯模块使用说明书重要信息危险图标:表示存在风险,可能会导致人身伤害或设备损坏件。
警告图标:表示存在风险,可能会导致安全隐患。
提示图标:表示操作建议,例如,如何设定你的工程或者如何使用特定的功能。
目录1.概述 (1)2.接口说明 (4)2.1编码开关设置 (4)2.2IO-BUS (5)2.3现场Modbus总线接口 (6)2.4模块地址跳线 (9)2.5模块的防混设计 (9)3.指示灯说明 (9)4.功能说明 (11)4.1诊断功能 (11)4.2冗余功能 (12)5.工程应用 (14)5.1底座选型说明 (14)5.2现场配置说明 (14)5.2.1串行总线结构 (14)5.2.2拓扑结构及线缆长度 (15)5.2.3接地形式 (16)5.2.4终端 (16)5.2.5Modbus网络单网配置1 (16)5.2.6Modbus网络单网配置2 (17)5.2.7Modbus网络单网冗余配置1 (19)5.2.8Modbus网络单网冗余配置2 (21)5.2.9注意事项 (22)6.尺寸图 (23)7.技术指标 (23)K-MOD01DP/Modbus网桥通讯模块1.概述K-MOD01模块为K系列DCS系统中Profibus-DP/Modbus网桥通讯模块,支持Profibus-DP总线协议与Modbus协议,通过Profibus-DP总线与控制器进行组态参数与数据交换,实现DP从站功能,同时通过Modbus通讯协议获取或下发Modbus数据,从而实现将Modbus设备接入DCS系统。
模块通过采用螺钉固定在端子底座的安装方式,通过64针欧式连接器与K-PA T01或K-PAT21底座连接使用。
K-MOD01模块支持模块卡件冗余配置,支持带电热插拔(冗余和非冗余配置方式下均支持),外壳G3防腐等级。
modbus协议详解

<转>经过整理的Modbus通讯协议详解 -摘自csdn2011-04-23 11:28Modbus通讯协议简介Modbus协议Modbus协议最初由Modicon公司开发出来,在1979年末该公司成为施耐德自动化(Schneider Automation)部门的一部分,现在Modbus已经是工业领域全球最流行的协议。
此协议支持传统的RS-232、RS-422、RS-485和以太网设备。
许多工业设备,包括PLC,DCS,智能仪表等都在使用Modbus协议作为他们之间的通讯标准。
有了它,不同厂商生产的控制设备可以连成工业网络,进行集中监控。
当在网络上通信时,Modbus协议决定了每个控制器须要知道它们的设备地址,识别按地址发来的消息,决定要产生何种行动。
如果需要回应,控制器将生成应答并使用Modbus协议发送给询问方。
Modbus协议包括ASCII、RTU、TCP等,并没有规定物理层。
此协议定义了控制器能够认识和使用的消息结构,而不管它们是经过何种网络进行通信的。
标准的Modicon控制器使用RS232C实现串行的Modbus。
Modbus的ASCII、RTU协议规定了消息、数据的结构、命令和就答的方式,数据通讯采用Maser/Slave方式,Master 端发出数据请求消息,Slave端接收到正确消息后就可以发送数据到Master端以响应请求;Master端也可以直接发消息修改Slave端的数据,实现双向读写。
Modbus协议需要对数据进行校验,串行协议中除有奇偶校验外,ASCII模式采用LRC校验, RTU模式采用16位CRC校验,但TCP模式没有额外规定校验,因为TCP 协议是一个面向连接的可靠协议。
另外,Modbus采用主从方式定时收发数据,在实际使用中如果某Slave站点断开后(如故障或关机),Master端可以诊断出来,而当故障修复后,网络又可自动接通。
因此,Modbus协议的可靠性较好。
Modbus报文详解学习资料

M o d b u s报文详解Modbus协议概述Modbus作为在工业设备通讯上使用最多,应用最广的国际标准协议,在应SymLink发送:01 03 00 01 00 02 95 CB01代表设备地址103代表读取保持寄存器的值00 01代表采集点对应的寄存器号00 02代表读取2个连续寄存器的值95 CB为01 03 00 01 00 02计算所得的CRC值SymLink接收:01 03 04 00 00 00 00 FA 3301代表设备地址103代表读取保持寄存器的值04代表设备返回的数据个数,字节为单位00 00 00 00为数据返回的连续2个寄存器的值FA 33为01 03 04 00 00 00 00计算所得的CRC值SymLink在判断01、03、04这些反馈信息都合法,并且CRC校验无误的情况下,就可以对00 00 00 00 所在的数据值进行规定数据格式的解析。
目前支持Modbus协议的设备越来越多,包括PLC、智能仪表、通讯模块等等,如果厂家设备支持的通讯协议为标准格式的Modbus协议,那么在选择厂家的时候就直接选择国际标准的Modbus。
准备工作3Symlink工业智能机1任意型号4设备说明书和点表1说明书指导设置设备地址、波特率等通讯参数。
点表用来配置采集点信息。
设备连接✍RS485通讯,设备的A端子对应连接SymLink的A端子、设备的B端子对应连接SymLink的B端子,需要注意的是一根线上接多个IED的情况,一个是设备地址要唯一、波特率和其他串口参数要一致,另外接线的时候需要从一台IED的AB端子跳接到下一台IED的AB端子,防止并联分散传输信号。
✍RS232通讯,设备的发送针对应连接SymLink的RX、设备的接收针对应连接SymLink的TX、设备的接地针对应SymLink的GND。
✍以太网通讯,设备的网口对应连接到同一网段的SymLink LAN口,如果含多台以太网设备通讯,需要加交换机。
照明路灯PLC串口modbus和以太网4G网关
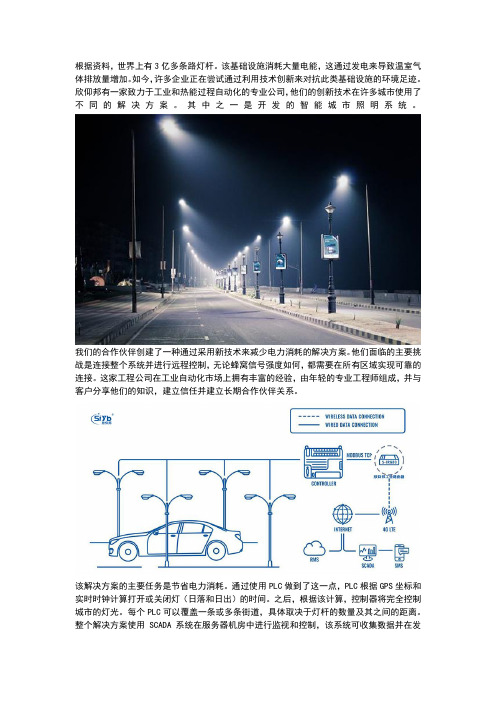
根据资料,世界上有3亿多条路灯杆。
该基础设施消耗大量电能,这通过发电来导致温室气体排放量增加。
如今,许多企业正在尝试通过利用技术创新来对抗此类基础设施的环境足迹。
欣仰邦有一家致力于工业和热能过程自动化的专业公司,他们的创新技术在许多城市使用了不同的解决方案。
其中之一是开发的智能城市照明系统。
我们的合作伙伴创建了一种通过采用新技术来减少电力消耗的解决方案。
他们面临的主要挑战是连接整个系统并进行远程控制,无论蜂窝信号强度如何,都需要在所有区域实现可靠的连接。
这家工程公司在工业自动化市场上拥有丰富的经验,由年轻的专业工程师组成,并与客户分享他们的知识,建立信任并建立长期合作伙伴关系。
该解决方案的主要任务是节省电力消耗。
通过使用PLC做到了这一点,PLC根据GPS坐标和实时时钟计算打开或关闭灯(日落和日出)的时间。
之后,根据该计算,控制器将完全控制城市的灯光。
每个PLC可以覆盖一条或多条街道,具体取决于灯杆的数量及其之间的距离。
整个解决方案使用SCADA系统在服务器机房中进行监视和控制,该系统可收集数据并在发生某些错误时发出SMS警报。
对于这种通信,欣仰邦DTU串口传输终端S-DT710蜂窝物联网网关用作使用Modbus TCP的PLC和SCADA之间的中介。
SCADA系统已通过SIM卡的特定APN 设置连接到L2 VPN隧道。
对于这种特殊情况,我们的合作伙伴选择了S-DT710,因为它提供了与该用例最相关的功能:4G LTE Cat4,完全支持Modbus TCP和1 x RJ45以太网。
此外,通过基于云的远程管理系统持续监视S-DT710和整个系统的运行。
Modbus- S-DT710支持Modbus TCP协议,这是PLC与SCADA系统之间进行通信所必需的向后兼容S-DT710是同时支持3G和2G的4G LTE CAT4网关,这意味着,如果4G信号断开,它将自动切换到3G或2G远程管理–S-DT710与远程管理系统兼容,解决方案运营商也可以从任何位置方便地管理整个解决方案。
电子称重仪表 XK3101-KH 使用说明书

6.0 仪表工作参数 F2....................................................................................................................... - 10 -
6.1 进入工作参数选项................................................................................................................- 10 6.2 功能 F2 选项参数组内容......................................................................................................- 10 -
3.0 显示面板....................................................................................................................................... - 5 -
MODBUS3.0 照明信号WZB-7
KJ2003监控系统MODBUS3.0照明综保通讯规约(第三版)电光防爆科技股份有限公司2009年7月MODBUS-RTU V3.0 照明信号综保通讯规约说明目录一、MODBUS 通讯协议简介二、通讯信息传输过程三、MODBUS 功能码简介四、错误校验码(CRC 校验)五、各指令对应的地址范围附件:CRC 校验算法程序一、MODBUS 通讯协议简介:MODBUS 协议是应用于电子控制器上的一种通用语言。
通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其它设备之间可以通信。
它已经成为一通用工业标准。
有了它,不同厂商生产的控制设备可以连成工业网络,进行集中监控。
MODBUS是一个请求/应答协议,并且提供功能码规定的服务。
MODBUS 是一种应用层报文传输协议,用于在通过不同类型的总线或网络连接的设备之间的客户机/服务器通信。
注:MODBUS是Modicon公司的注册商标。
数据编码:MODBUS 使用最高有效字节在低地址存储的方式表示地址与数据项。
即当发送多个字节时,首先发送最高有效字节。
例如:寄存器大小 值16 位 0x1234 发送的第一字节为 0x12 然后发0x34 通讯数据的类型及格式:信息传输为异步方式,以字节为单位,每字节为10 位的格式传输:字格式(串行数据)10 位二进制起始位 1 位,0数据位8 位,最低的有效位先被发送奇偶校验位偶校验停止位 1 位,1波特率 9600bps通讯数据(信息帧)格式:数据格式 地址码 功能码 数据区 CRC校验数据长度 1字节 1字节 N字节 16位CRC校验码2数据字节: 1个字节由8 位二进制数(8Bit)组成。
CRC 校验: CRC 生成后,低字节在前,高字节在后。
MODBUS-RTU的帧结构:在RTU 模式中,新的信息总是以至少3.5个字符的静默时间开始。
紧接着传送第一个域:设备地址。
整帧信息必须以一个连续的数据流进行传输。
如果信息结束前存在超过1.5个字符以上的间隔时间,则出错。
基于Modbus TCP协议水下机器人照明灯电压调节
基于Modbus TCP协议水下机器人照明灯电压调节马军海;冯迎宾;高世阳;李智刚【期刊名称】《自动化与仪表》【年(卷),期】2011(26)7【摘要】In order to restraint the influent of electric cables voltage dividers and variation in number of loads in power system on the voltage of ROVs' (the Remote Operation Vehicle) lamps, it is significant to adopt adjusting voltage and to increase ROVs' lamps lifetime. Based on Modbus TCP protocol, this paper uses client and server C/S mode and Windows Multi-threads to achieve automation control of the voltage of ROVs' lamps. The result of the experiment indicates that comparing with PID algorithm single-parameter PID algorithm is character with faster response and smaller overshoot and more convenient to turn. The single-parameter PID algorithm is able to restrain voltage fluctuation of lamps and reach the expectation.%为了抑制水下电缆分压、电网负载变化对水下机器人照明灯电压影响,采用控制策略对水下机器人照明灯电压进行调节,抑制电压波动,提高照明灯寿命具有重要意义.该文采用客户机和服务器模式,Modbus TCP协议通信,Windows多线程实现照明灯电压自动控制.通过实验得出:相比经典PID算法,单参数PID算法响应快,超调量小且整定方便,控制算法抑制照明灯电压波动,设计达到预期目标.【总页数】5页(P68-72)【作者】马军海;冯迎宾;高世阳;李智刚【作者单位】中国科学院沈阳自动化研究所,沈阳,110016;中国科学院研究生院,北京,100049;中国科学院沈阳自动化研究所,沈阳,110016;中国科学院研究生院,北京,100049;海军驻天津防救代表室,天津,300042;中国科学院沈阳自动化研究所,沈阳,110016【正文语种】中文【中图分类】TP214【相关文献】1.基于Modbus/TCP协议的无人水下航行器监控系统设计 [J], 于曹阳;向先波;牛泽民;徐国华2.基于MODBUS-TCP协议的视觉系统、PLC与工业机器人通信设计 [J], 周文婷;孟凡文;王海亮3.基于ModbusTCP协议的机器人与HMI的通讯 [J], 谈沛;王红;冷雄伟4.基于Modbus TCP协议的制冷空调产品以太网通讯测试系统分析 [J], 陈熙;马小津;王雷;张成;李晨安5.基于工业以太网的嵌入式控制器的研究——基于Rabbit2000实现Modbus/TCP协议的相关技术 [J], 吴爱国;何熠;王冬青因版权原因,仅展示原文概要,查看原文内容请购买。
MODBUS-新建案例_测试案例
MODBUS新建案例一、MODBUS协议解析1.1协议原理Modbus是一种串行通信协议,最初设计用于连接电子控制器。
它已成为工业电子设备之间进行通信的通用语言。
Modbus协议能让控制器相互之间、控制器经由网络(例如以太网)和其他设备之间进行通信。
这种通信可以发生在主从设备之间,从设备根据主设备的请求提供数据。
Modbus协议是一种通讯协议标准,可以用于Master-Slave或者Peer-to-Peer 的通讯模式。
它已经被广泛地应用于工业自动化领域中,例如HMI、PLC、工业机器人等设备之间的通讯。
Modbus协议包括ASCII、RTU和TCP三种模式。
其中,ASCII模式使用可读的字符编码,适合低速的串行链路;RTU模式使用二进制编码,适合高速的串行链路;TCP模式则使用TCP/IP协议进行通信,适合于较高的数据吞吐量。
1.2工作原理Modbus是一种串行通信协议,最初设计用于连接电子控制器。
它采用主从结构,其中一个是主机设备,其他设备作为从设备。
主机设备发起通信请求,从设备响应请求并执行相应的操作。
(1)连接建立:Modbus从站设备初始化并等待从总线上接收主站的请求。
主站发出连接请求,并将连接请求发送到从站。
如果通信成功,从站将发送连接确认给主站,表明连接建立成功。
(2)数据传输:在建立连接后,主站可查询从站,从而读取或写入寄存器中的数据。
主站发送命令码及寄存器地址到从站,从站根据命令码和寄存器地址进行相关操作。
从站根据主站发送的请求进行相应的操作,并将结果返回给主站。
(3)连接断开:主站或者从站可以将连接中断,以释放网络带宽或关闭设备。
主站转而向其他从站建立连接或等待从站重新上线后建立连接。
Modbus客户端与服务器的主要交互形式是发送请求和返回响应。
Modbus 客户端通过向Modbus服务器发送请求来获取或更改数据。
这些请求可以是读取寄存器、写入寄存器、读取输入位等不同的操作。
装置用MODBUS协议(3.0)
开关设备综合监测装置MODBUS 协议SLD.SWXY.1一 主题内容与适用范围A) 本协议规定了本公司生产的开关设备综合监测装置通过485接口与外部通信设备进行通讯的基本要求。
B) 本协议适用于公司所有开关设备综合监测装置。
二 通信系统物理参数C) 通信方式:RS485D) 通信参数:9600,n,8,1三 协议描述1、参数查询(03号功能码)功能描述:参数查询是用于远程计算机查询某个开关设备的相关参数。
Function code (功能码):0X03,读寄存器数据Start address (High ):寄存器起始地址高字节Start address (Low ):寄存器起始地址低字节Number of points(High):读取字数(寄存器数量)的高字节 Number of points(Low):读取字数(寄存器数量)的低字节CRC(Low):CRC 校验低字节CRC(High):CRC 校验高字节Data :返回数据,高字节在前,低字节在后,如果一帧数据中包含N 个寄存器(N>0)的值,则Data 长度为2*N ,依寄存器地址放置数据0x68:CRC校验不一致0x01:功能码错误0x02:错误的起始地址0x97:错误的数据长度1为在工作位置,取0表示不在工作位置;断路器合闸信号取1表示处于合闸状态,否则表示处于分闸状态。
各位的具体定义如下:2、通信对时功能描述:通信对时是远程计算机向开关设备综合监测装置发送设置当前时间时所用。
“分”、“秒”则高字节补0,数据在低字节例如:年份2011为0x07DB 5月份表示为0x0005,以此类推。
复合时间设置按两步进行:Number of points(High):寄存器数量的高字节Number of points(Low):寄存器数量的低字节如果寄存器数量为N,则字节数则为2*NNumber of Bytes:数据位的字节数(2*N)1)设置年月日数据位从前往后依次是“年月日”,总共占用四个字节,其中“年”占两个字节,高字节在前,低字节在后,例如,2011年5月13日表示为0x07DB050D;2)设置时分秒数据位从前往后依次是“时分秒”,总共占用四个字节,用低三个字节,高字节补0,例如,16点30分10秒表示为0x00101E0A。
LCM9800-ModbusRTU智能照明模块说明书
安装说明书LCM9800-ModbusRTU装箱清单LCM9800智能照明模块 1个说明书 1份合格证 1张一、产品参数二、Modbus寄存器定义说明●1X---Input Status(0x02)1X寄存器地址DI 端口说明10001 1 数字输入端口10002 2 数字输入端口10003 3 数字输入端口10004 4 数字输入端口10005 5 数字输入端口10006 6 数字输入端口10007 7 数字输入端口10008 8 数字输入端口10009 9 数字输入端口●0X—Coil Status(0x01/0x05)0X寄存器地址K端口说明00001 1 继电器输出端口00002 2 继电器输出端口00003 3 继电器输出端口00004 4 继电器输出端口00005 5 继电器输出端口00006 6 继电器输出端口00007 7 继电器输出端口00008 8 继电器输出端口●4X--Holding Register(0x03/0x06)4X寄存器地址端口说明40001 --- 设备地址 1(1-120)40002 --- 波特率9600(19200/9600/4800/2400)40003 --- 校验位无(0-无/1-奇/2-偶)40011 --- DI联动K,1有效40012 --- DI9消防联动(只开不关)k 1-8,1有效40013 ---上电K输出:0默认输出0;1输出断电时的K状态;2输出1;3输出40015的设置状态40014 --- 40013为1时存储K状态40015 --- K状态设置,40013为3时有效三、接线说明:将模块底部卡扣向下拉开,如图拨动硬件内部拨片(参考下表格)拨动号设备ID 拨动号设备ID1 1 12 32 2 123 73 4 1234 15 48 1234531516 123456 63当拨码为0时,可写40001设定值为通讯地址,拨码值为1-63时,40001显示拨码值,写寄存器无效。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
KJ2003监控系统 MODBUS照明信号综保通讯规约(第三版)中国 电光防爆电气有限公司2009.7MODBUS-RTU V3.0 照明信号综保通讯规约说明目录一、MODBUS 通讯协议简介二、通讯信息传输过程三、MODBUS 功能码简介四、错误校验码(CRC 校验)五、各指令对应的地址范围附件:CRC 校验算法程序一、MODBUS 通讯协议简介:MODBUS 协议是应用于电子控制器上的一种通用语言。
通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其它设备之间可以通信。
它已经成为一通用工业标准。
有了它,不同厂商生产的控制设备可以连成工业网络,进行集中监控。
MODBUS是一个请求/应答协议,并且提供功能码规定的服务。
MODBUS 是一种应用层报文传输协议,用于在通过不同类型的总线或网络连接的设备之间的客户机/服务器通信。
注:MODBUS是Modicon公司的注册商标。
数据编码:MODBUS 使用最高有效字节在低地址存储的方式表示地址与数据项。
即当发送多个字节时,首先发送最高有效字节。
例如:寄存器大小 值16 位 0x1234 发送的第一字节为 0x12 然后发0x34 通讯数据的类型及格式:信息传输为异步方式,以字节为单位,每字节为10 位的格式传输:字格式(串行数据)10 位二进制起始位 1 位,0数据位8 位,最低的有效位先被发送奇偶校验位偶校验停止位 1 位,1波特率 9600bps通讯数据(信息帧)格式:数据格式 地址码 功能码 数据区 CRC校验数据长度 1字节 1字节 N字节 16位CRC校验码数据字节: 1个字节由8 位二进制数(8Bit)组成。
CRC 校验: CRC 生成后,低字节在前,高字节在后。
MODBUS-RTU的帧结构:在RTU 模式中,新的信息总是以至少3.5个字符的静默时间开始。
紧接着传送第一个域:设备地址。
整帧信息必须以一个连续的数据流进行传输。
如果信息结束前存在超过1.5个字符以上的间隔时间,则出错。
一帧信息的标准结构如下:开始 地址域 功能域 数据域 CRC校验 结束T1-T2-T3-T4 8 位 8位 n*8位 16 位 T1-T2-T3-T4二、通讯信息传输过程:当通讯命令由发送设备(主机)发送至接收设备(从机)时,符合相应地址码的从机接收通讯命令,并根据功能码及相关要求读取信息,如果CRC 校验无误,则执行相应的任务,然后把执行结果(数据)返送给主机。
返回的信息中包括地址码、功能码、数据区及CRC 校验码。
如果CRC校验出错则不返回任何信息。
地址码:地址码是每次通讯信息帧的第一字节,从0 到255。
这个字节表明由用户设置地址的从机将接收由主机发送来的信息。
同一总线系统内的每个从机都必须有唯一的地址码,并且只有符合地址码的从机才能响应回送信息。
当从机回送信息时,回送数据均以各自的地址码开始。
主机发送的地址码表明将发送到的从机地址,而从机返回的地址码表明回送的从机地址。
相应的地址码表明该信息来自于何处。
功能码:是每次通讯信息帧传送的第二个字节。
MODBUS 通讯规约可定义的功能码为1到127。
作为主机请求发送,通过功能码告诉从机应执行什么动作。
作为从机响应,从机返回的功能码与主机发送来的功能码一样,并表明从机已响应主机并且已进行相关的操作。
中国 电光 WZB-6GT型微机综合保护装置功能码如下表:功能码 定义 操作01 读开关量输入 读取一路或多路开关量状态输入数(遥信)03 读寄存器数据 读取一路或多路寄存器数据(遥测、参数、时间)05 写一路开关量输出控制“分/合/复位”,(遥控)06 写单路寄存器 把1组二进制数据写入单个寄存器10H 写多路寄存器 把多组二进制数据写入多个寄存器数据区:数据区包括需要由从机返回何种信息或执行什么动作。
这些信息可以是数据(如:开关量输入/输出、模拟量输入/输出、寄存器等等)、参考地址等。
例如,主机通过功能码03告诉从机返回寄存器的值(包含要读取寄存器的起始地址及读取寄存器的长度),则返回的数据包括寄存器的数据长度及数据内容。
对于不同的从机,地址和数据信息都不相同(可参照通讯信息表)。
CRC校验:MODBUS-RTU通讯协议的CRC(冗余循环码)包含2个字节,即16位二进制数。
低字节在前,高字节在后。
其详细说明见后页。
静止时间要求:在MODBUS-RTU模式中,发送数据前要求数据总线静止时间即无数据发送时间至少大于3.5个字符的时间(如波特率9600时为3.6ms);整帧的信息必须以一个连续的数据流进行传输,如果信息结束前存在超过1.5个字符以上的间隔时间,则出错。
三、MODBUS功能码简介:3.1功能码01(HEX):读1路或多路开关量输入状态例:主机要读取地址为01,开始地址为E200H的开关量D0-D15的输入状态主机发送的报文格式:01 01 00 00 00 10 3D C6主机发送 字节数 发送信息备注从机地址 1 01H 发送到地址为01的从机功能码 1 01H 读开关量输入状态起始地址 2 0000H 写入首地址E200H的偏移地址开关量位数 2 0010H 读取开关量位数(长度可变)CRC码 2 3DC6H 由主机算出的CRC校验码从机响应返回的报文格式:01 01 02 01 02 39 AD从机响应 字节数 返回信息备注从机地址 1 01H 来自01从机功能码 1 01H 读开关量输入状态返回字节数 1 02H 开关量字节数开关量状态 2 0102H 开关量的状态(低前高后)CRC码 2 39ADH 由从机计算出的CRC校验码3.2功能码03(HEX):读1路或多路寄存器(包括两个数据区:1.模拟量区 2.定值区) 例1:主机要读取地址为01,开始地址为E000H的1个从机寄存器数据(模拟量数据)主机发送的报文格式:01 03 00 00 00 01 84 0A主机发送 字节数 发送信息备注从机地址 1 01H 发送到地址为01的从机功能码 1 03H 读取寄存器起始地址 2 0000H 相对首地址E000H 的起始地址数据长度 2 0001H 读取1个字的内容CRC校验 2 840AH 主机计算出的CRC校验码从机响应返回的报文格式:01 03 02 00 64 B9 AF从机响应 字节数 返回信息备注从机地址 1 01H 来自01从机功能码 1 03H 读取寄存器返回字节数 1 02H 读取2个字节数据 2 0064H 从机返回1个寄存器的数据内容CRC校验码 2 B9AFH 由从机计算出的CRC校验码例2:主机要读取地址为01,开始地址为E100H的1个从机寄存器数据(定值数据)主机发送的报文格式:01 03 01 00 00 01 85 F6主机发送 字节数 发送信息备注从机地址 1 01H 发送到地址为01的从机功能码 1 03H 读取寄存器起始地址 2 0100H 相对首地址E000H 的起始地址数据长度 2 0001H 读取1个字的内容CRC校验 2 85F6H 主机计算出的CRC校验码从机响应返回的报文格式:01 03 02 00 64 B9 AF从机响应 字节数 返回信息备注从机地址 1 01H 来自01从机功能码 1 03H 读取寄存器返回字节数 1 02H 读取2个字节数据 2 0064H 从机返回E100H寄存器的数据内容CRC校验码 2 B9AFH 由从机计算出的CRC校验码3.3功能码05(HEX):写一路开关量输出(遥控分合、信号复归)偏移地址“0000H”为继电器“分”位置,“0001H”为继电器“合”位置,“0002H”为继电器“信号复归”位置。
“FF00”处于ON状态,“0000H”处于OFF状态。
例:主机控制地址为01的从机“合”。
主机发送的报文格式:遥 控 分:01 05 00 00 FF 00 8C 3A遥 控 合:01 05 00 01 FF 00 DD FA遥控复归:01 05 00 02 FF 00 2D FA主机发送 字节数 发送信息 备注从机地址 1 01H 发送到地址为01的从机功能码 1 05H 写控制命令起始地址 2 分:0000H合:0001H复归:0002H相对首地址E300H 的起始地址控制命令 2 FF00H/0000H 控制“合”/“分”/“复归”CRC码 2 DDFAH(合)(ON) 由主机计算出的CRC校验码 从机响应返回的报文格式:与主机发送的报文格式及数据内容完全相同。
3.4功能码06(HEX):写单路寄存器主机利用这个功能码把一个数据保存到从机的数据寄存器中。
MODBUS规约中寄存器是16位,且高位在前。
例:主机把0065保存到E100H的从机寄存器中(从机地址码为01)。
主机发送:01 06 01 00 00 65 48 1D主机发送 字节数 发送信息备注从机地址 1 01H 发送到地址为01的从机功能码 1 06H 写单路寄存器起始地址 2 0100H 相对首地址E000H 的起始地址数据 2 0065H 将数据写入E100H寄存器CRC校验码 2 481DH 由主机计算出的CRC校验码从机响应返回的报文格式:与主机发送的报文格式及数据内容完全相同。
从机返回:01 06 01 00 00 65 48 1D主机发送 字节数 发送信息备注从机地址 1 01H 发送到地址为01的从机功能码 1 06H 写单路寄存器起始地址 2 0100H 相对首地址E000H 的起始地址数据 2 0065H 将数据写入E100H寄存器CRC校验码 2 481DH 由主机计算出的CRC校验码3.5功能码10(HEX):写多路寄存器主机利用这个功能码把多个数据保存到从机的数据寄存器中。
MODBUS规约中寄存器是16位,且高位在前。
例:主机把0065保存到E100H的从机寄存器中(从机地址码为01)。
主机发送:01 10 01 00 00 01 02 00 65 76 BB主机发送 字节数 发送信息备注从机地址 1 01H 发送到地址为01的从机功能码 1 10H 写多路寄存器起始地址 2 0100H 相对首地址E000H 的起始地址寄存器个数 2 0001H 字数=1寄存器长度 1 02H 字节数=2数据 2 0065H 将数据写入E100H寄存器CRC校验码 2 76BBH 由主机计算出的CRC校验码从机响应返回的报文格式:与主机发送的报文格式及数据内容完全相同。
从机返回:01 10 01 00 00 01 00 35主机发送 字节数 发送信息备注从机地址 1 01H 发送到地址为01的从机功能码 1 10H 写多路寄存器起始地址 2 0100H 相对首地址E000H 的起始地址寄存器个数 2 0001H 字数=1CRC校验码 2 0035H 由主机计算出的CRC校验码3.6功能码10(HEX):写多路寄存器(时间参数)主机利用这个功能码把多个数据保存到从机的数据寄存器中。