基于单片机的红外遥控小车控制电路的设计
基于单片机对遥控小车的控制
1 遥 控小 车 的原理 分析
I
I
—N 厂 GD 一 —、
r X2
3 1 5 7 1 1
离, 对移动小 车采取 红外遥控 的方法 , 比较方便 的操 是 作。在遥控指挥的过程中, 红外发射器对发射信息进行
一
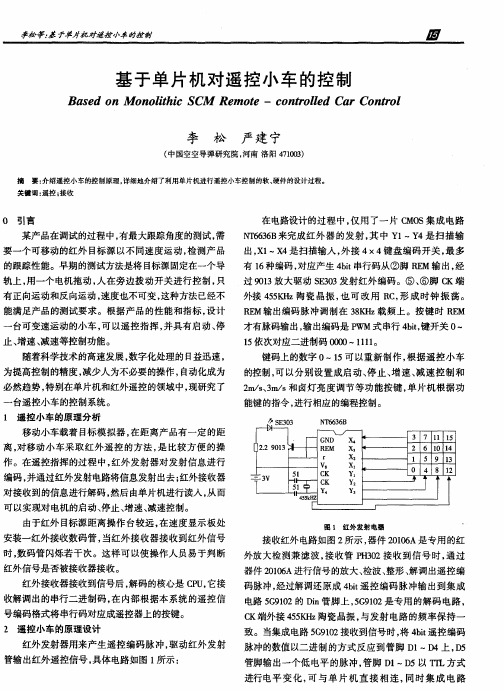
R M输出编码脉冲调制在 3K z E 8 H 载频上。按键时 R M E 才有脉码输出, 输出编码是 P WM式 串行 4i键开关 0 b, t ~ l 依次对应二进制码 00 一l1。 5 00 11 键码上的数字 0 1 可 以重新制作 , 5 根据 遥控小 车 的控制 , 以分别设置成启动、 可 停止、 速、 增 减速控制 和 2 /、m s m s3 / 和卤灯亮度调节等功能按键 , 片机根据功 单 能键 的指令 , 进行相应的编程控制。
过 91 03放大 驱 动 S 33发 射红 外 编码 。⑤ 、 脚 C E0 ⑥ K端 外接 45 H 5K z陶瓷 晶振 , 可 改 用 R , 成 时 钟 振 荡 。 也 C形
某产品在调试的过程 中, 有最大跟踪角度的测试 , 需 要一个可移动的红外 目标源 以不 同速度运动 , 检测产 品 的跟踪性能。早期的测试方法是将 目 标源固定在一个导 轨上 , 用一个电机拖动 , 人在旁边拨动开关进行控制 , 只 有正向运动和反向运动 , 速度也不可变, 这种方法已经不 能满足产品的测试要求。根据产品的性能和指标 , 设计
图 3 遥 控 小 车 控 制原 理
5 90 G 12又驱动 共 阳数码管 来显示 4i串行 码 的数 值 。 bt 在控 制方 面 , 用 MC 一5 使 S 1系列 芯 片 中的 A 8C2 T9A
遥控小车控制系统设计
三江学院本科生毕业设计(论文)题目遥控小车控制系统设计电气与自动化工程院(系)电气工程及其自动化专业指导教师熊老师职称副教授起讫日期 2015年3月2日-2015年6月13日直螺纹接头的加工摘要当今社会,人们已经离不开遥控,研究遥控的对象越来越多,本文研究的红外遥控小车就是在这样的背景下提出的。
这款小车采用STC12C5A60S2作为控制核心,采用红外遥控原理将其应用到红外遥控小车上。
遥控器通过单片机产生38kHz方波并编码进行红外发射,小车接收信号进行解码,经单片机对信号处理,判断地址码和指令码,进行相应的控制操作。
采用PWM信号来产生不同的平均电压控制直流电机的转速。
该小车可以进行红外遥控,实现前进、后退、左转和右转等功能。
经软硬件联合调试,所设计的遥控小车运行平稳、正确,具有一定的应用价值。
关键词:红外遥控小车;STC12C5A60S2单片机;编码;解码直螺纹接头的加工ABSTRACTPeople are inseparable from the remote control in today's society, more and more remote control object is researched, this paper studies the infrared remote control car is put forward in the background.The car uses STC12C5A60S2 as the core of the control, using the principle of infrared remote control was applied to the infrared remote control car. The remote control was encoded by MCU to produce 38 kHz square wave and infrared emission , The car decoding by MCU for signal processing after receiving signal, judging address code and order code, carries on the corresponding control operation. PWM signal is used to produce different average voltage control of DC motor speed. Was realized by the infrared remote control, the car can move forward, backward, turn left and turn right, and other functions.The joint debugging of software and hardware, and the designed remote control car running smoothly and correctly.In the end ,the car has a certain application value.Key words: infrared remote control car;STC12C5A60S2 MCU;Coding;decoding 直螺纹接头的加工目录第一章绪论 (1)1.1 课题的工程背景、目的和意义 (1)1.2红外线 (1)1.2.1红外线的简介 (1)1.2.2红外线的应用 (2)1.3 国内外研究现状 (2)1.4 STC12C5A60S2单片机 (2)1.4.1 STC12C5A60S2单片机的简介 (3)1.4.2 STC12C5A60S2单片机的主要特点 (3)1.4.3 STC12C5A60S2单片机的主要参数 (3)1.5 论文的主要内容及章节安排 (3)第二章方案设计 (4)2.1 系统结构 (5)2.2模块选择 (5)2.2.1控制模块的选择 (5)2.2.2车身的选择 (6)2.2.3遥控控制模块的选择 (6)2.2.4电机的选择 (6)第三章硬件设计 (7)3.1控制模块STC12C5A60S2单片机 (8)3.2红外遥控发射模块 (9)3.3驱动模块 (10)3.4直流供电模块 (12)第四章软件设计 (13)4.1软件设计策略 (13)4.2红外发射程序 (13)4.3红外接收程序 (19)直螺纹接头的加工第五章测试环境 (20)5.1运行环境 (21)5.2小车实物图 (21)致谢 (22)参考文献 (23)直螺纹接头的加工第一章绪论1.1 课题的工程背景、目的和意义智能小车,也称轮式机器人,是以当今社会的汽车为研究对象,通过智能控制能够自动运行奔跑的机器人。
毕业设计论文-红外线控制电动小车

毕业设计论文-红外线控制电动小车1 引言1.1 研究背景与意义随着现代电子技术和自动化技术的飞速发展,红外线遥控技术因其操作简便、抗干扰能力强、低功耗等特点在众多领域得到了广泛应用。
电动小车作为现代交通工具的一种,其控制系统的智能化、远程化成为研究热点。
红外线控制电动小车将红外线遥控技术与电动小车相结合,使得小车操作更为便捷,控制更为精确,尤其在特殊环境下,如危险区域的远程探测和物品搬运,具有显著的应用价值。
1.2 研究目的与内容本文旨在设计并实现一种基于红外线控制的电动小车。
研究内容包括:红外线控制技术的原理及其在电动小车上的应用;电动小车的硬件设计,主要包括电动机选型与驱动、电源与控制系统设计;电动小车的软件设计,包括红外线接收与解码、速度与方向控制算法等。
1.3 研究方法与论文结构本研究采用理论与实验相结合的方法,首先对红外线控制技术进行概述,分析电动小车的结构与功能需求,进而设计并实现相应的硬件和软件系统。
论文结构如下:第二章介绍红外线控制技术的基本原理及发展应用;第三章详细阐述电动小车的硬件与软件设计;第四章进行系统测试与分析;第五章对论文研究进行总结,指出不足,并对未来发展进行展望。
2. 红外线控制技术概述2.1 红外线基本原理红外线是一种电磁波,位于可见光与微波之间,波长范围约为700纳米到1毫米。
红外线的发现归功于天文学家威廉·赫歇尔在19世纪早期的实验。
红外线具有热效应,能够被许多物体吸收并转化为热能,这一特性使其在通信和控制技术中得到了广泛应用。
红外线遥控技术基于红外线的传输特性,通过发射和接收红外线信号来实现远距离控制。
其基本原理是利用红外发射二极管发射调制后的红外信号,经过空气传播后,由红外接收器接收并解调,最终将信号传送到控制电路进行处理。
2.2 红外线遥控技术的发展与应用红外线遥控技术自20世纪60年代问世以来,已广泛应用于家电遥控、工业控制、智能家居等领域。
基于STM32单片机的智能红外测温小车设计与实现

基于STM32单片机的智能红外测温小车设计与实现1. 引言智能红外测温技术在现代工业、医疗、农业等领域中得到广泛应用,而基于STM32单片机的智能红外测温小车的设计与实现,可以实现自动测量、远程操作等功能,提高测温效率和准确性。
本文将详细介绍该智能红外测温小车的设计与实现过程。
2. 系统架构智能红外测温小车由STM32单片机、红外测温传感器、电机驱动模块、Wi-Fi模块等组成。
STM32单片机充当中央处理器,接收并处理红外测温传感器采集的数据,通过驱动模块控制小车的运动,同时通过Wi-Fi模块实现与外界的通讯。
3. 硬件设计3.1 STM32单片机选择与连接选择STM32系列单片机作为中央处理器,根据需求选择适当的型号(如STM32F103C8T6),并将其与其他硬件模块(如传感器和驱动模块)进行连接,实现数据的输入和输出。
3.2 红外测温传感器选择合适的红外测温传感器模块,通过连接到STM32单片机的模拟输入引脚,实现对环境温度的采集和测量。
3.3 电机驱动模块选择适当的电机驱动模块,通过连接到STM32单片机的输出引脚,控制小车的运动,包括前进、后退、左转和右转等操作。
3.4 Wi-Fi通讯模块选择合适的Wi-Fi通讯模块,将其连接到STM32单片机的串口或SPI接口,通过无线网络与其他设备(如PC或手机)进行通讯,实现遥控和数据传输等功能。
4. 软件设计4.1 系统初始化在STM32单片机中,初始化各个硬件模块,包括红外测温传感器、电机驱动模块和Wi-Fi通讯模块,配置相应的引脚和参数,为后续操作做好准备。
4.2 红外测温数据采集通过STM32单片机读取红外测温传感器采集的模拟量数据,并进行相应的数值转换和校准,得到实际的温度数值。
4.3 运动控制通过STM32单片机控制电机驱动模块,实现小车的前进、后退、左转和右转等运动操作。
根据红外测温数据的变化,可以自动调整小车的运动方向,实现对温度异常区域的快速检测。
基于51单片机的红外遥控小车设计和制作

基于51单片机的红外遥控小车设计和制作红外遥控小车设计和制作是一个有趣且实用的项目。
本文将介绍一个基于51单片机的红外遥控小车的设计方案和制作过程。
设计方案:1.硬件设计:-采用STC89C52单片机作为控制核心,具有良好的性能和稳定性。
-红外接收器模块:用于接收红外信号并将其转换为电信号。
-直流电机:用于驱动小车的轮子,实现前进、后退、转弯等动作。
-驱动电路:将单片机的输出信号转换为合适的电流和电压来驱动电机。
-电源:使用锂电池作为电源,提供所需的电能。
2.软件设计:-红外信号解码:将接收到的红外信号进行解码,并判断是前进、后退、转弯等命令。
-控制逻辑:根据解码结果产生相应的电信号,驱动电机实现小车的相应动作。
-响应机制:处理红外信号的时延和干扰,避免误操作或信号丢失。
制作过程:1.连接电路:-将STC89C52单片机与电源、红外接收器模块和驱动电路连接。
确保连接正确、稳定。
-连接直流电机和驱动电路,通过电路板或者线缆进行连接,确保电机可以正确驱动。
2.烧录程序:- 使用Keil C编译器编写控制程序,并将程序通过编程器烧录到STC89C52单片机中。
3.完善控制逻辑:-在控制程序中添加红外信号解码和控制逻辑代码,使小车能够根据接收到的红外信号做出相应动作。
4.调试和测试:-将红外遥控器对准红外接收器模块,发送不同的红外信号,确保小车能够正确接收和处理信号。
-确保小车能够根据接收到的信号做出正确的动作,如前进、后退、转弯等。
5.完善功能:-可以根据实际需求添加其他功能,如声控、避障、图像识别等,提升小车的智能性和功能性。
通过以上设计和制作过程,一个基于51单片机的红外遥控小车就可以完成。
这个小车可以通过红外遥控器进行远程控制,并实现前进、后退、转弯等动作。
它可以在室内或者室外进行运行,并具有一定的智能性和便携性。
这个项目不仅可以培养学生的动手能力和创造力,还可以加深对电子电路和嵌入式系统的理解和掌握。
基于AVR的遥控小车的设计

基于AVR的遥控小车的设计引言本文将介绍基于AVR单片机的遥控小车的设计。
遥控小车是一种具有较高自主性的机器人,可以通过遥控器实现远距离操控。
这种小车在各个领域都有广泛的应用,如智能家居、仓库物流等。
本文将介绍遥控小车的硬件设计、软件设计以及实现过程。
硬件设计1. 硬件组成遥控小车的硬件主要包括以下几个部分: - AVR单片机:用于控制整个小车的运行逻辑。
- 电机驱动模块:用于控制小车的移动,一般通过PWM信号控制电机的速度和方向。
- 电源模块:为遥控小车提供供电,可以使用锂电池、直流电源等。
- 传感器模块:用于感知周围环境,如红外线传感器、超声波传感器等。
2. 连接方式遥控小车的硬件部分需要通过电路板进行连接。
一般来说,AVR单片机与其他硬件模块之间的连接方式包括以下几种: - GPIO口连接:使用GPIO口实现单向或双向的数据传输。
- SPI接口连接:通过SPI接口进行数据传输。
- UART接口连接:使用UART接口进行串口通信。
- I2C接口连接:通过I2C接口进行数据传输。
硬件连接时需要注意各个模块之间的电平匹配和信号调制,以保证数据传输的正确性和稳定性。
软件设计1. 控制逻辑遥控小车的控制逻辑一般包括以下几个部分: - 遥控信号接收:通过遥控器接收到的信号来判断小车的运行指令,如前进、后退、左转、右转等。
- 数据处理:将接收到的信号进行处理,转换为相应的控制命令。
- 电机控制:根据控制命令控制电机的运行,如改变电机的速度、方向等。
2. 编程框架AVR单片机的软件设计一般使用嵌入式C语言进行编写。
常用的编程框架有以下几种: - Arduino:适合初学者,提供了丰富的库函数和示例程序。
- AVR Studio:适合有一定经验的开发人员,提供了更加灵活的开发环境和工具链。
在软件设计过程中,需要注意内存使用、任务调度等问题,以保证程序的稳定性和效率。
实现过程1. 硬件搭建首先,根据设计需求选择合适的硬件模块,并进行适当的连线和固定。
基于单片机的红外遥控智能小车设计
基于单片机的红外遥控智能小车设计引言:随着科技的不断发展,智能物联网已经走进了我们的生活。
智能小车作为一种智能化的产品,能够实现远程遥控、自动避障等功能,受到了广大消费者的青睐。
本文就基于单片机的红外遥控智能小车设计进行详细介绍。
一、设计目标本设计的目标是通过红外遥控,实现对智能小车的远程控制,小车能够根据收到的指令进行行驶、避障等操作。
二、设计原理1.主控芯片:本设计使用单片机作为主控芯片,常用的单片机有51系列、AVR系列等,可根据实际需求选择合适的芯片型号。
2.红外遥控模块:红外遥控模块是实现红外通信的设备,可以将遥控器发出的红外信号解码成数据,实现遥控操作。
3.电机驱动模块:电机驱动模块可将单片机的PWM信号转化为电机的动力驱动信号,控制小车的行驶方向和速度。
4.超声波传感器:超声波传感器可以感知到小车前方的障碍物距离,根据测得的距离,进行相应的避障操作。
5.电源模块:小车需要使用适当的电源,通常是锂电池或者直流电源供应。
三、系统设计1.硬件设计:(1)搭建小车底盘:根据所选择的底盘,搭建小车结构,并安装好电机驱动模块、电源模块等硬件设备。
(2)连接电路:将红外遥控模块、超声波传感器等硬件设备与主控芯片进行连接,确保每个模块正常工作。
2.软件设计:(1)红外遥控程序设计:通过红外遥控模块接收红外信号,并解码成相应的指令。
根据指令控制电机驱动模块,实现小车的行驶方向和速度控制。
(2)超声波避障程序设计:根据超声波传感器测得的距离,判断是否有障碍物,如果有障碍物就停止或者转向。
四、实验结果和讨论经过实验验证,本设计的红外遥控智能小车能够准确接收红外信号,并根据指令控制小车的行驶方向和速度。
同时,超声波传感器能够及时感知到前方的障碍物,并进行相应的避障操作。
然而,该设计仍然存在一些不足之处,比如超声波传感器的测距范围有限,可能无法感知到较小的障碍物。
此外,红外遥控信号的传输距离也有一定限制,需要保持遥控器与小车之间的距离不过远。
基于单片机的红外遥控小车设计
基于单片机的红外遥控小车设计本文将详细介绍基于单片机的红外遥控小车设计。
小车采用红外遥控技术,能够实现远程控制和执行各种动作。
首先,将介绍设计的硬件和软件部分。
然后,将详细描述小车的功能和实现过程。
最后,将对设计进行总结和展望。
硬件部分主要由以下组成:单片机、红外接收器、电机驱动器、电机和电源。
单片机是控制整个系统的核心部件,负责接收红外信号,解码并执行相应的动作。
红外接收器用于接收红外信号并传输给单片机进行解码。
电机驱动器用于控制车辆的运动,根据单片机的指令控制电机的速度和方向。
电机则负责提供车辆的动力。
电源则提供整个系统的电能供应。
软件部分主要由以下组成:单片机的程序和红外信号的解码。
单片机的程序是使用C语言编写的,负责接收红外信号并判断相应的指令。
红外信号的解码则是将红外接收器接收到的信号转换成数字信号,使单片机能够理解和执行。
小车的功能包括前进、后退、左转、右转和停止。
远程控制器上的按键对应不同的指令,通过红外遥控技术将指令发送给红外接收器。
红外接收器接收到指令后,传输给单片机进行解码。
单片机根据指令控制电机驱动器,使小车实现不同的动作。
实现过程如下:首先,根据硬件部分的连接原理图将各个硬件连接起来,并将电源接通。
然后,编写单片机程序,使其能够接收红外信号并解码。
接下来,根据不同的指令,编写程序控制电机驱动器,使小车实现前进、后退、左转、右转和停止的功能。
最后,对整个系统进行测试和调试,验证其功能和性能。
在设计过程中,还需要考虑小车的安全性和可靠性。
例如,可以加入碰撞检测功能,当小车检测到碰撞时,自动停止运动。
同时,还可以加入电池电量检测功能,当电池电量低于一定值时,自动停止运动并发出警报。
总结:通过本文的介绍,我们了解了基于单片机的红外遥控小车设计。
该设计能够实现远程控制和执行各种动作,具有很大的应用潜力。
然而,在实际应用中,还需要进一步优化设计,以提高小车的性能和功能。
希望未来能够有更多的研究和创新,推动该领域的发展。
基于STM32单片机红外遥控两轮自平衡小车的设计
GND1:5V电源地;
EN:5V使能引脚(5V工作,0V关闭,禁止悬空);
PWM1:控制电机1的转速;
DR1:控制电机1的转向;
PWM2:控制电机2的转速;
DR2:控制电机2的转向;
系统的整体设计框图如图2-2所示:
图2-2系统整体框图
3
3.1
STM32F1系列屈于中低端的32位ARM微控制器,其内核是Cortex-M3㈡。
STM32F103是一款常用的中等容量增强型、低功耗、32位基于ARM核心的带64K或128K字节闪存的微控制器,拥有USB、CAN、7个定时器(3个16位定时器、1个16位带死区控制和紧急刹车、2个看门狗定时器、系统时间定时器:24位自减型计数器)、2个ADC、9个通信接口(2个I2C接口、3个USART接口、2个SPI接口、CAN接 口USB 2.0全速接口)等众多资源。这款芯片运行时的最高频率可达到72MHz,其供 电电压为2.0V至3.6V,拥有64K或128K字节的闪存程序存储器,带有4个片选的静 态存储器控制器15o该芯片还具有看门狗定时器,系统时间定时器,低功耗空闲和CRC计算单元,使得STM32F103芯片在众多嵌入式控制应用系统提供高灵活、超有效的解 决方案。
2.3
程序是系统稳定运行的大脑神经,如果一个单片机控制系统没有可以用來控制的 程序,那么再好的电路也是没有实际意义的。
程序的编写过程中需要注意以下儿点:
1、程序的编写一定要按照预先搭建好的电路进行,操作一定要针对与被操作的对 象。
2、程序的编写应该做到以尽量少的编程语言去实现更复杂的控制内容,只有这样, 编写的程序才能够简洁完整。
基于51单片机红外遥控小车制作报告
基于51单片机红外遥控小车制作报告基于51单片机红外遥控小车是一项有趣且有挑战性的项目,通过该项目的实践,可以深入了解单片机和红外遥控的原理,并提高自己的动手能力和解决问题的能力。
本文将介绍基于51单片机红外遥控小车的制作过程和实现的功能。
一、实验原理1.51单片机原理51单片机是一种广泛应用于电子产品和嵌入式系统中的微控制器,采用的是哈佛结构,具有较高的性能和稳定性,广泛使用于工业自动化和嵌入式开发中。
2.红外遥控原理红外遥控是一种常见的遥控方式,通过使用红外光发射器和接收器之间的通信,实现无线遥控设备的功能。
红外遥控信号一般由多个比特组成的数据包,通过不同的数据包可以实现不同的操作。
二、实验器材和工具1.器材2个电机、L298N电机驱动模块、51单片机、红外接收器、红外发射器、遥控器、电池盒、杜邦线等。
2.工具电烙铁、焊锡、剪线钳、螺丝刀、万用表等。
三、制作步骤1.电路连接将L298N电机驱动模块与电机连接,L298N模块的输入引脚与单片机的输出引脚连接,红外接收器与单片机的IO引脚连接,红外发射器与单片机的IO引脚连接。
2.程序设计根据需求编写程序,包括红外遥控信号解析、电机控制等功能。
3.调试测试四、实现的功能1.红外信号解析通过红外接收器接收到遥控器发送的红外信号,解析信号中的数据包,判断用户的操作。
2.基本运动控制根据用户的操作,通过控制电机的转动方向和速度,实现小车的前进、后退、左转、右转等基本运动功能。
3.灵敏度调节通过调整程序中的参数,可以调节小车的灵敏度,使其对用户的操作更加敏感和准确。
4.智能避障在程序中添加红外避障功能,当小车检测到前方有障碍物时,自动停下或转向避开障碍物,保证小车的安全。
五、实验心得通过制作基于51单片机红外遥控小车的实验,我深入了解了51单片机和红外遥控的原理,并提高了自己的动手能力和解决问题的能力。
在实验过程中遇到了一些困难,但通过查阅资料和与同学交流,我成功地解决了这些问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)单片机模块:对红外信号进行处理,控制设计功能的实现。
(2)按键模块:包括四个按键,表示小车的动作即前进、后退、左右转动。
(3)无线红外信号的发送及接收模块:按键按下时红外发射管发送红外信号,红外接收器接收到信号后送入单片机处理。
(4)四个选项通道:发送和接收部分别带有四个选项开关,进项选择控制,当发送与接收选择同一通道时才能正确的发送和接收信号。只有接收端的地址码和发射端的地址码设置完全相同,输出端才有输出信号。解码芯片将数据输入端接收到的信号,经内部电路解码辨识确认。如果所接收到的信号地址码与本机地址编码相同,AUXOUT1~AUXOUT4输出与无线电发射系统所发射的相对应的开关信息给单片码,单片机电路不响应。
设计中的软件部分要求实现发送装置的按键控制、接收装置的输出控制、发送与接收的通道检测控制。发送信号采用载波38KHZ进行发送,接收装置有相应的延时时间。本系统采用的是上电复位的复位方式。本设计要求作出实物,所以要求每步的设计都具有可行性,不只是单单的只停留在原理阶段。要想做出实物PCB电路板的制作是非常重要的一部分,要进行电路板的设计,采用Protel99se进行原理图和PCB图的设计,作出实际符合要求可行的电路板。其次就是选择元器件进行焊接调试,随着设计的进行发现用LED发光二极管来代替电机来实现功能的指示更加方便可行,因此就用四个发光二极管来指示小车的前进后退左右转的动作。最后通过调试发送装置能在六米左右的范围内对接收装置进行控制。
This design is the use of infrared and single-chip microcomputer system for wireless control of the car, through the wireless infrared signals to control the car.
(3)Wireless infrared signal transmitting and receiving module: the infrared emission tube infrared signal is sent when a button is pressed, the infrared signal received by the receiver into the SCM treatment.
(5)电机的正反转控制模块:对单片机输出的控制信号进行放大处理通过改变两对大功率PNP、NPN三极管的导通,控制流入直流动电机里的电流方向。以实现直流电动机的正反转。工作时两对三极管为了避免发热过多损坏和对电机造成不良影响等问题采用大功率三极管,通过控制三极管的基极的高低电位使一对PNP或NPN导通即可控制电流的方向实现直流电机正反转。
The main hardware circuit includes:
(1)SCM module: carries on processing to the infrared signal, realize the control function.
(2)The key module: includes four keys, said car motion forward and backward, turning left and right.
该系统具有结构简单,低功耗,抗干扰性强等特点,能准确的达到对小车的控制目的。
关键词:红外线;单片机;小车;控制
Introduction
Infrared ray is a means of near distance, high-speed wireless communication,All along, the infrared remote control, remote sensing technology has been widely used in the production of toys, home appliances and industrial control etc.As a close distance, indoor communication means, has the incomparable advantage of infrared radio Therefore, remote control and intelligent technology research, application is very meaningful and very high market value.Characteristics of infrared remote control is the point to point communication technology using infrared, does not affect the surrounding environment, does not interfere with other electric equipment.Through the control instruction based on single-chip microcomputer for remote control of a variety of equipment, can choose different buttons to control the different devices, thus convenient remote control.Intelligent vehicle control has been widely used in scientific research in various fields, and has great practical value.
This design is the use of infrared and single-chip microcomputer system for wireless control of the car, through the wireless infrared signal transmitted by infrared light, infrared receiver receives the signal through the MCU to control the motor, and then realize the car movement. The system uses P06 microcontroller as the core, using low-power 8 bit microprocessor speed CMOS technology. Have electrical one-time programmable memory and memory. P06 is applicable to working in a noisy environment therefore, it is suitable for use in motor control of the household electric appliances. Because P06 consumption at a very low current, its application in low power consumption is beneficial, such as remote controller andbattery power supply system. The sending part of infrared communication is mainly for conversion of the data to be transmitted into pulse a certain format, and then drive the infrared emitting tube out data. The receiving part is to complete the infrared receiving, amplification, demodulation, restore the synchronous firing of the same format, but the high and low potential, just the opposite of the pulse signal, the output TTL compatibility level. Finally the pulse signal into data by decoding, thus achieving data transmission. The infrared receiver is a kind of can receive infrared signals and can independently from the infrared receiver to output and TTL power frequency signal compatible devices, volume and plastic triode ordinary tube almost, suitable for all kinds of infrared remote control and infrared data transmission.
P0X is an 8-bit microprocessor with low-power and high-speed CMOS technology. It is equipped with an electrical one time programmable memory and a data memory.P0X is designed to work in noisy environment。Therefore, it is suitable to be used in application of home appliance motor control. Because P0X operates in a very low current consumption, it is advantageous in low-power application, like remote controller and battery-powered system.