一种汽车前照灯自动高度调节控制系统设计
汽车自适应前照灯控制系统的设计

科技与创新┃Science and Technology&Innovation ·60·2022年第08期文章编号:2095-6835(2022)08-0060-03汽车自适应前照灯控制系统的设计*郭海,闻士硕,董高越,陈佩江(临沂大学机械与车辆工程学院,山东临沂276002)摘要:现在市场上汽车车灯照射范围和角度很多都是固定的,当汽车夜间在弯道上行驶时,前照灯无法调节前照灯光轴方向,由于灯光无法探测到弯道内侧从而出现“视野盲区”,驾驶员只能观察到前方灯光照射的地方,而弯道另一侧的情况信息不能及时获取,从而带来交通安全隐患。
基于方向盘转角等信息,设计了汽车自适应前照灯照明系统,根据前照灯转弯水平方向偏转模型,制定了自适应前照灯系统的控制策略。
汽车自适应前照灯控制系统能够根据车辆行驶状态、方向盘转角提供更加合理的照射范围,为驾驶员的行车安全提供更有力的保障。
关键词:自适应;前照灯;方向转角;控制策略中图分类号:TP273文献标志码:A DOI:10.15913/ki.kjycx.2022.08.018汽车前照灯自适应控制系统是现今汽车电子产业的必然产物,它通过对车速、方向盘转角信号的采集然后进行数据分析,从而实时调整两侧大灯的照射范围,使得灯光与汽车的前进方向始终保持一致,使驾驶员有更为合适的视野范围,确保了驾驶员在任何时刻都拥有最佳可见度,大大提高了夜间行车的安全[1]。
汽车自适应照明系统目前正处于迅速发展时期,国内研究尚处于起步阶段,基础理论还不完善,这给研究工作带来很大的机遇和挑战。
本项目针对传统汽车照明系统光型单一、无法进行故障预知、安全系数不高的现状,整合了全车灯光系统,设计了一种自适应的照明系统。
以最简单的方式实现了汽车的低成本、智能化照明。
1汽车自适应前照灯控制系统的总体设计汽车自适应前照灯控制系统主要由获取必要汽车行驶信息的各传感器(包括车速和方向盘转角等)、信号采集处理电路、驱动电路、执行电机等部分组成[2],系统主要可分为以下几个模块,如图1所示。
汽车前照灯自适应控制系统设计
汽车前照灯自适应控制系统设计作者:王文建王鑫惠金粤飞黄志涛来源:《科学与财富》2016年第26期摘要:本文设计了汽车前照灯自适应控制系统,该系统根据车辆行驶状态、速度变化以及天气环境等因素,自动控制前照灯进行实时动态的光照调节,实现前照灯自适应照明,从而提供最佳道路照明效果,保障行车安全。
汽车前照灯自适应照明系统是利用传感器,根据道路的状况、时段以及天气变化等因素,对车辆行驶中的任何变化,自动做出反应,进行自动调节,并采取有效措施,确保行车安全,控制系统从车内的电子系统和传感器获得信息,由传感器来辨识各种照明状况。
根据传感器传过来的信息可以对各种驾驶情况进行反馈从而实现多种照明分布。
关键词:汽车前照灯;自适应控制系统;自适应照明;亮度感应调节引言随着汽车电子技术的发展,人们对汽车的安全、舒适和人性化要求越来越高,而传统的前照灯系统存在照明光光型单一、近距离照明效果不好、弯道照明有暗区、照明有炫光等问题,严重影响了行车的安全。
随着汽车的安全技术越来越受到人们的重视,而由于汽车的普通前照灯具有固定的照射范围,当驾驶者在夜间弯道行驶时,普通前照灯无法改变、调节照明角度的方向,常常会在弯道内侧出现盲区,驾驶者的视线被限制在大灯光束照射的直线范围内,这对于夜间弯道行驶非常危险,极大地影响了夜间行车的安全性。
汽车前照灯的亮度和照射方向对于行车安全是至关重要的,前照灯的发光强度不足或者照射方向不合适,汽车前方的情况就不能清晰看见,存在安全隐患。
在此基础上,设计安全的照明系统是有必要的,相对于传统的前照灯系统更能适应道路的实际情况,运行成本低,并能够显著提高驾驶者夜间行车的安全性和舒适性,能够大大减少夜间眩目导致的交通事故,极大满足了人们对行车安全驾驶和舒适性的要求,随着汽车工业的发展,其功能将会越来越完善,影响也将会越来越深远,具有重要的现实意义。
1 系统原理汽车前照灯亮度感应调节及远近光灯自动切换系统可在车灯开启的情况下根据外界光线影响自动切换远近光,在车辆行驶过程中,驾驶者不再需要人为干预车辆灯光,自动切换远近光也不会对会车车辆驾驶员的视野造成影响,并且在远近光确定的情况下根据外界光线影响自动调节灯光亮度。
一种新型车辆前照灯自动控制器
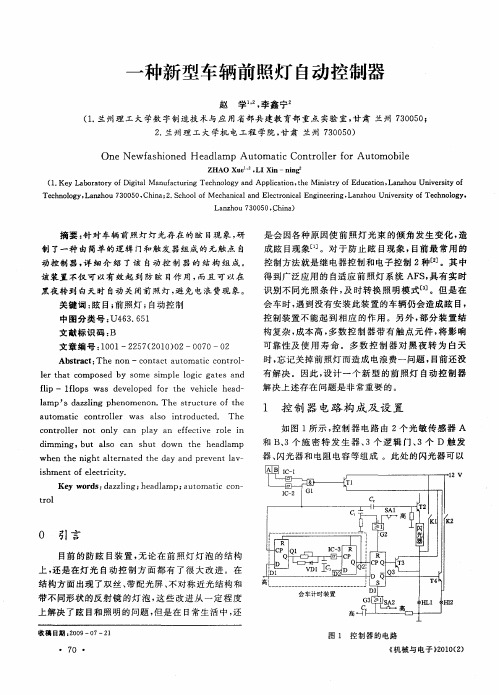
( . y La o ao yo g t lM a u a t rn c n l g n pi a in,h n sr fE u a in, n h u Un v r i f 1 Ke b r t r fDi i n fc u i g Te h o o y a d Ap l t a c o t e Mi it y o d c t o La z o ie st o y
得 到广泛应 用的 自适 应 前照 灯系 统 AF , 有实 时 S具
识别 不 同光 照条 件 , 时转 换 照 明模式 [ 。但 是 在 及 3 ] 会 车时 , 到没有安装 此装 置的车辆仍会 造成眩 目, 遇 控制装 置不 能起 到相 应 的作 用 。另外 , 分装 置结 部 构复 杂 , 成本 高 , 数控 制 器带 有触 点 元件 , 影 响 多 将 可靠性 及 使用 寿命 。多数 控 制 器 对 黑 夜转 为 白天
Ab t a t The n n—c n a ta oma i on r l src : o o t c ut tc c t o —
l rt a o p s d by s e h t c m o e om e i pl lgi t s a sm e o c ga e nd
器 、 光 器 和 电 阻 电容 等 组 成 。此 处 的 闪 光 器 可 以 闪
d mmi i ng,bu a s c n hu d wn h h a l mp t l o a s t o t e e d a wh n t gh le n t d t e d y a r v nt lv e he ni ta t r a e h a nd p e e a —
ihm e to l cr ct s n fe e t iiy. Ke r s d z l y wo d : a z i ng; a l m p; u o a i o — he d a a t m tc c n
一种汽车前照灯调节系统的设计
一种汽车前照灯调节系统的设计作者:冷帅贾文超来源:《中国科技博览》2014年第20期[摘要]前照灯自适应系统(AFS)是通过对方向盘转角、汽车速度的数据采集,从而对汽车前照灯做调整以增强行车安全的系统。
在本文中,通过角度传感器,速度传感器的设计,数据传送到微控制器MSP430F149,来驱动步进电机,从而完成了自适应系统控制汽车前照灯的配光形象,和照射角度的变化。
[关键词]自适应前照灯系统;主控单元;数据采集中图分类号:U463.651 文献标识码:A 文章编号:1009-914X(2014)20-0282-021.引言中国的汽车产业在飞速的发展,同时带来的也有交通事故的频繁发生,而由于驾驶员视线问题造成的事故比重占了一大半。
前照灯是为驾驶员在夜间或者特殊环境下提供照明的,照明的好坏直接影响了驾驶员的安全。
我国现有的传统照明系统存在诸多问题。
在弯道和特殊环境下不能提供充足的照明,而AFS系统可以实现。
现如今很多高档车如奥迪A4,宝马5系等已经安装此系统。
所以,AFS系统的研发是汽车工业的发展方向。
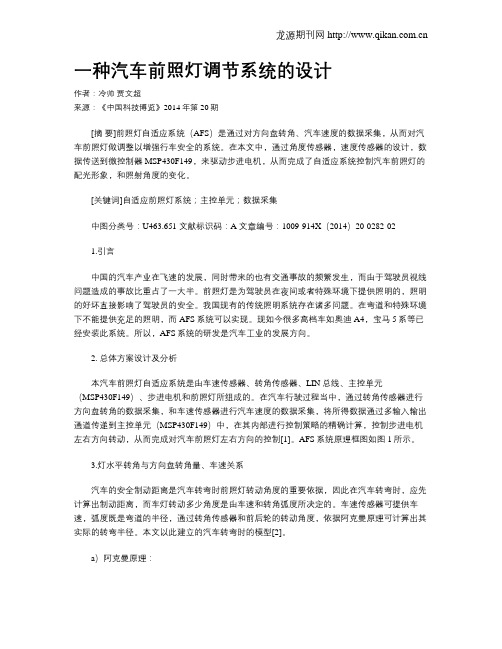
2. 总体方案设计及分析本汽车前照灯自适应系统是由车速传感器、转角传感器、LIN总线、主控单元(MSP430F149)、步进电机和前照灯所组成的。
在汽车行驶过程当中,通过转角传感器进行方向盘转角的数据采集,和车速传感器进行汽车速度的数据采集,将所得数据通过多输入输出通道传递到主控单元(MSP430F149)中,在其内部进行控制策略的精确计算,控制步进电机左右方向转动,从而完成对汽车前照灯左右方向的控制[1]。
AFS系统原理框图如图1所示。
3.灯水平转角与方向盘转角量、车速关系汽车的安全制动距离是汽车转弯时前照灯转动角度的重要依据,因此在汽车转弯时,应先计算出制动距离,而车灯转动多少角度是由车速和转角弧度所决定的。
车速传感器可提供车速,弧度既是弯道的半径,通过转角传感器和前后轮的转动角度,依据阿克曼原理可计算出其实际的转弯半径。
基于模型的汽车前照灯自动调平控制系统

基于模型的汽车前照灯自动调平控制系统汽车前照灯自动调平控制系统是一项非常重要的汽车安全技术。
这个系统旨在使车辆头灯随着车辆的加速和制动而自动调整高度,从而确保最佳的照明效果和安全驾驶。
在这个系统中,传感器被用来检测车辆的水平位置、斜坡和荷载,并自动调整前照灯的高度,以保证照明的最佳效果。
这个系统由几个主要的部件组成,包括传感器、动力机构和控制器。
传感器负责检测车辆的水平位置和荷载,并将这些信息通过电信号传输到控制器中。
动力机构则是一个电动马达,根据控制器的指令向后转动或向前转动,以调整前照灯的高度。
而控制器则是整个系统的核心,负责接收传感器的信号,判断车辆的运动状态,并对电动马达发出控制指令。
在正常的行驶中,传感器通过检测车辆的水平位置,将这些信息反馈到控制器。
如果车辆处于水平状态,控制器不会发出任何指令,因为灯光已经被正确调整。
如果车辆的前端升高或降低,控制器会自动发送一个指令给电动马达,使灯光进行相应的调整,从而保持最佳照明效果。
当车辆行驶在斜坡上时,传感器将检测到车辆的坡度,控制器会自动发送指令给电动马达,使前照灯的高度适应斜坡的坡度,以确保驾驶者能够看到前方道路及其周围的所有物体。
除了检测车辆的水平位置和斜坡坡度外,传感器还可以检测车辆的荷载。
这在运载重物时特别重要。
当车辆装载重物时,车身通常会降低,使前照灯的高度也随之降低。
在这种情况下,控制器会自动向电动马达发出指令,使前照灯适应车辆荷载的重量,并进行相应的调整,以保证照明的最佳效果。
总之,汽车前照灯自动调平控制系统是一个非常实用的系统,可以保证驾驶者在任何驾驶条件下都能看到前方道路的最佳状况。
因此,汽车制造商应该将这个系统加入到他们的车辆中,并不断改进和升级,以确保驾驶者的安全。
同时,伴随着科技的不断发展,这个系统也将在未来得到更广泛的应用,成为汽车安全的重要组成部分。
除了上文中提到的车辆水平位置、斜坡及荷载的监测和自动调整外,现代的汽车前照灯自动调平控制系统还具有其他的一些功能,比如通过可编程电路控制灯光的亮度、颜色等,以适应不同的驾驶环境和路况。
汽车前照灯近光高度调节的设计
汽车前照灯近光高度调节的设计汽车前照灯是保障车辆安全行驶的重要设备,其中近光灯在城市运行中具有很大的作用。
由于不同驾驶员身高不同,所以近光灯的高度调节需考虑到驾驶员的视线高度问题,通过近光灯高度调节设计,可以更好地满足不同驾驶员的需求,增强驾驶员的视野和行驶的安全性。
设计方案:近光灯高度调节设计方案包括调节机构和高度指示,通过调节机构来实现近光灯准确并且方便的高度调节,通过高度指示来确保调节的准确性。
1.调节机构:近光灯高度调节机构应设计为方便操作的手动式或电动式。
手动式调节机构可采用旋钮式或拉杆式,轻轻松松进行高度的调整。
电动式调节机构则采用按键式或遥控式进行高度的调整,方便快捷。
2.高度指示:调节机构与高度指示相结合,设计高度指示可采用指针式或数字显示式。
驾驶员可通过高度指示来准确看到当前近光灯的高度,并且可以根据自己的身高进行调节,确保近光灯的灯光照射到道路前方而不会影响到其他车辆驾驶员的视线。
设计思路:近光灯高度调节设计方案需要考虑到以下几点:1.应根据驾驶员的人体工程学原理设计,考虑驾驶员的视线高度和近光灯光束的照射范围。
2.需要充分考虑调节机构的便捷性和灵活性,既方便驾驶员使用,又提高操作的效率。
3.同时需要注意调节机构的可靠性,保证在高速行驶过程中也能够平稳调节,不影响驾驶的安全性。
4.高度指示的设计直接影响到调节的准确性,需要注意高度指示的清晰度和易用性。
总结:汽车前照灯近光高度调节设计方案充分考虑到驾驶员身高差异和视线高度的问题,通过设计方便操作的调节机构和高度指示,有效提高了驾驶员对灯光光束照射范围的掌控能力,增强了行驶的安全性。
随着科技的不断发展,近光灯高度调节设计也在不断优化,未来将更加智能化、便捷化。
近光灯的高度调节设计是汽车照明系统的重要组成部分,其作用是调节车内驾驶员所使用近光灯的光束照射范围,以保证不同车内驾驶员所使用的近光灯具有适合其视线高度的照射范围,从而达到增强驾驶员的行车安全性的目的。
一种汽车LED大灯照射高度的自动控制方法[发明专利]
专利名称:一种汽车LED大灯照射高度的自动控制方法
专利类型:发明专利
发明人:李锋,孙晗笑,叶童玲,施凯敏,许袁,蔡小若,奚一昕,汪平
申请号:CN202111419298.6
申请日:20211126
公开号:CN114056226A
公开日:
20220218
专利内容由知识产权出版社提供
摘要:本发明公开了一种汽车LED大灯照射高度的自动控制方法,在车辆行进过程中,利用红外激光发射器向车前路面投射线结构光图案,利用红外摄像机持续采集车前路面图像并提取其中的结构光图案,对结构光图案的变形情况进行分析,计算路面与车身之间的夹角数值并发送给控制器,从而实现照射高度的自动控制。
本发明可以快速分析分析路面角度变化情况,避免了纹理不丰富区域背景与目标特征相似造成的误判。
申请人:江苏科技大学
地址:212100 江苏省镇江市丹徒区长晖路666号
国籍:CN
代理机构:南京苏高专利商标事务所(普通合伙)
代理人:柏尚春
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种汽车前照灯自动高度调节控制系统设计马世典 林绍华 董利伟上海汽车技术中心(南京) 【摘要】 文章介绍了基于XC866L⁃4FR 单片机的汽车前照灯高度自动调节控制系统的设计,实现了对永磁混合式步进电动机的控制㊂研究了车辆运行的各种工况并提出一种可行的前照灯调节策略,并分别从硬件和软件的角度入手对系统进行了可靠性设计㊂ 【关键词】 灯光调节 可靠性设计 步进电动机Development of an Adjusting System for High Lighting of AutomobileMa Shidian ,Lin Shaohua ,Dong Liwei ShangHai Motor Technology Center (NJ ) Abstract :The paper introduces the design of Adaptive System for High Lighting based on XC866L⁃4FR,the control of hybrid step motors.Studies the working conditions of automobile and gives the adjusting strategy.We design the hardware and software by using somespecial means to,so that the reliability of the system can be improved greatly. Key words :adjusting system for lighting reliability design step motor 车灯系统包括各种照明设备和灯光信号装置,是车辆不可或缺的部分㊂其中汽车前照灯,是用于夜间前方道路照明的灯光,对夜间行车安全十分重要㊂当夜间汽车行驶在颠簸的路面上而使车轮受到随机激振,或者车身负载不平衡,汽车进行加速和制动等操作时,车体不同部位相对地面的距离会不断发生变化,导致前照灯灯光照射角度也在不断变化,因此目前中高端的车型均配备有前照灯的自动高度调节系统,由于调节电动机的实时频繁动作和工况传感器的信号实时性要求较高,造成系统的可靠性很难保证㊂本文介绍了一种基于步进电动机开环控制的前照灯高度调节系统的设计,特别是对于步进电动机干扰下的系统可靠性设计㊂图 11 前照灯高度自动调节工作原理及系统构成 该系统主要包括以下部分:信号采集模块㊁控制模块和执行模块㊂工作原理如下:车身悬架高度的物理变化通过高度传感器采集处理后变为电信号,并反馈到控制模块;控制模块接收到反馈信号后将根据既定的控制策略进行判断是否需要调节前照灯,进而计算调节的角度;然后发出驱动信号到执行模块,执行器将按照指令实现对左右前照灯反光罩的调节㊂总的来说调节过程就是一个物理变化转换为电信号,然后经过处理后再由电信号驱动产生另一个物理变化的过程㊂由此可知,电气信号的处理对系统的可靠性和稳定性是至关重要的㊂ 其系统构成如图1所示,信号采集模块作为整个系统的输入部分主要包含车辆悬架高度传感器;控制模块作为整个系统的核心部分采用单片机作为处理器负责对输入信号的调理并按照既定要求实现对执行模块的实时控制;执行模块采用步进电动机实现对前照灯高度的调节,控制方法为开环控制;其中电源模块为车辆蓄电池㊂2 硬件设计 系统硬件设计的指导思想是,充分利用XC866芯片的优点(指令功能丰富㊁运算速度快㊁接口简单㊁控制精度高㊁功能强大㊁价格便宜等),从外围保护电路角度出发加强系统的抗干扰性能,同时也要兼顾到系统对外部其他回路的干扰㊂2.1 系统IO 分配 MCU 采用高性能8位微控制器 XC866L⁃4FR㊂它集成片内振荡器,因此具备了许多增强功能以满足新型应用㊂此外,嵌入式闪存(Flash)器件为系统开发和批量生产提供了很大的灵活性,多闪存组(Flash Bank)结构支持在线应用编程(IAP),通过外部主机(例如PC)对嵌入式FLASH 方便的编程或擦除㊂XC866还具有如下的非常优越的功能:用来产生脉宽调制信号㊁带有电动机控制专用模式的捕获/比较单元(CCU6);功能扩展的10位模/数转换单元(ADC),具有如自动扫描和结果累加(用于抗混迭滤波或结果平均)等特性;功能扩展的通用异步收发器(UART),支持局域互联网(LIN)应用,并为许多器件提供LIN 的低级驱动程序;提供不同的省电模式选择,以满足低功耗应用;用于优化中断处理的智能分页机制,扩展了控制片内外设功能的特殊功能寄存器(SFR )的地址范围㊂ 芯片引脚的分配工作主要包含输入信号㊁控制输出㊁系统状态检测㊁休眠唤醒㊁电源等的定义和端口分配㊂输入信号有悬架高度传感器㊁外部灯开关信号;控制输出信号有步进电动机驱动信号㊁步进电动机驱动芯片复位信号㊁传感器使能信号㊁背光调节使能信号等电源检测信号等;系统状态监控信号包含外部电源状态监控㊁外部上拉电压信号监控;系统休眠方式采用掉电休眠模式,该模式的唤醒方式可以通过软件配置MCU 内部控制字的方式设置唤醒模式,考虑到车辆在起动和非起动状态下均需要外部灯光的工作,所以设置两个唤醒条件:IGN 上电唤醒和RXD 下降沿信号唤醒;系统主要包含如下三种电源:IO 口电源(V P )㊁AD 参考电源(V A )和内核电源(V C ),其中内核电源为2.5V(由嵌入式电压调节器产生,并可对外输出)㊂详细各IO 分配和引脚使用情况见表1㊂表1 引脚使用情况名称引脚号类型功能描述备 注P0.32输出H 桥控制信号数字电平信号P0.54输入监控IGN 电源MCU 休眠唤醒P1.027输入监控外部灯开关MCU 休眠唤醒P1.529输出H 桥Reset 信号数字电平信号P1.69输出Sensor 使能数字电平信号P1.710输出背光调节使能数字电平信号P2.217输入电源状态监控模拟信号(AD 转换)P2.623输入Sensor 信号输入模拟信号(AD 转换)P2.726输入Lamp 开关信号输入模拟信号(AD 转换)P3.032输出H 桥控制信号数字电平信号P3.133输出H 桥控制信号数字电平信号P3.234输出H 桥控制信号数字电平信号P3.335输出H 桥控制信号数字电平信号P3.436输出H 桥控制信号数字电平信号(续)名称引脚号类型功能描述备 注P3.537输出H 桥控制信号数字电平信号P3.630输出内部复位状态指示数字电平信号P3.731输出H 桥控制信号数字电平信号VDDP 18电源IO 电源正+5V VSSP19GND IO 电源GND GNDVAREF 25电源AD 参考电源正+5V VAGND 24GNDAD 参考电源GNDGND VDDC 8电源内核电源正(输出)+2.5V VSSC 7GND 内核电源GND(输出)GND 2.2 步进电动机控制 步进电动机作为执行器,以其灵活的控制性能和良好的经济性能获得很多使用者的青睐㊂本文也使用其作为前照灯灯光高度调节的执行器㊂在使用步进电动机时其对相关电路产生的干扰也是不可忽视的问题,特别是电动机停止起动瞬间的反向瞬间脉冲干扰,严重时会烧毁芯片或击穿元件造成整个系统的失效㊂ H 桥功率驱动电路可应用于步进电动机㊁交流电动机及直流电动机等的驱动㊂永磁步进电动机或混合式步进电动机的励磁绕组都必须用双极性电源供电,也就是说绕组有时需正向电流,有时需反向电流,这样的绕组电源需用H 桥驱动㊂本文应用两片芯片方便地组成两个电桥用于驱动两个两相永磁式步进电动机,其原理如图2所示㊂图 22.3 硬件抗干扰设计 整车电气环境是非常复杂的,特别是当车辆运行在恶劣工况下,电源系统的干扰和感性负载起动㊁停止时的反向浪涌干扰都会对车辆的控制器和其他用电器产生强的电磁干扰㊂因此,汽车控制器的抗干扰设计就显得尤为重要了㊂2.3.1 电源模块抗干扰设计 整车电压在蓄电池供电时V Bat为+12V,起动发动机后通过发电机供电V Bat为+14V左右㊂因此,需要通过外加稳压芯片的方式给MCU及相关模块提供+5V电源㊂此处采用7805芯片产生稳定的+5V电源,设计原理见图3所示㊂图 3 该系统不仅包含控制信号电源也包含执行器电源,步进电动机的额定电流为2A,对于毫安级的控制信号电流来说,微小的外部干扰都将会造成其大幅的波动;因此电源模块的电路设计必须充分考虑到这一点㊂本系统采用信号电源和电动机驱动电源隔离的方法,信号电源的设计见图3,步进电动机电源的设计原理见图4㊂电源正极通过完全隔离的两路处理电路分别作为信号电源和步进电动机驱动电源,接地线也是完全分开的,信号地线和电动机驱动电源地线通过不同的端子与外部不同接地点连接,其中信号地线与相关联的其他控制器信号电源共地,以保证信号的有效识别,从而达到抵抗干扰的作用㊂ 车辆供电电源为蓄电池,在其实际使用过程中常常会有蓄电池正负极反接的现象发生,因此作为车辆用电器必须具备电源反接保护的功能㊂本文采用如图3和图4所示的,在电源线串联耐反向电压的二极管的方法来避免电源反接可能带来的危害㊂图 42.3.2 步进电动机驱动模块抗干扰设计 步进电动机作为感性负载,其对周围控制电路的传导干扰是不容忽视的㊂考虑到步进电动机对外部的干扰主要在起动和停止瞬间较为严重,本文分别采用了如下方法加以优化: 1)对各IC芯片电源正负极增加去耦电容㊂ 2)H桥两组电动机驱动输出信号间并联电容㊂ 3)H桥电源端对地反接快速恢复雪崩二极管㊂ 4)直接选用具有内部保护电路的H桥芯片(BTM700G)㊂ 方法1的具体情况见图3和图4,方法2主要用来吸收步进电动机运行过程中产生的微小波动干扰㊂采用方法3的主要原因是:电源端串联耐反向电压冲击的二极管,这样在步进电动机停止瞬间,电动机内部残存的大量电荷无法快速泄放,将不断在电动机相关回路中循环,从而造成干扰;如果在电源端对地反接雪崩二极管,该电量将在瞬间击穿该二极管,达到快速泄流的效果,并在泄流后二极管能够快速恢复㊂电源优化和抗干扰设计优化前后步进电动机对整车网络信号干扰对比如图5所示㊂图 53 软件设计3.1 主程序设计 主程序中主要实现对硬件的初始化和对控制系统软件各状态的循环检测及各子程序的调用㊂本系统中主程序主要实现功能如下: 1)初始化硬件㊂ 2)循环检测外部灯光开关状态㊂ 3)循环检测车辆悬架高度情况㊂ 4)循环检测车辆运行情况,按照设定进入节电模式;其流程如图6所示㊂车辆每次重新连接蓄电池,系统都将彻底初始化一次,包括清除原纪录㊁重置控制器端口㊁重新识别步进电动机行程等;同理,断开蓄电池连接将会终止一切程序,无论此时系统处于何种工况㊂图 6 初始化硬件工作包括: 1)配置MCU I/O口及芯片工作模式(V Bat上电时执行)㊂ 2)初始化步进电动机位置,具体操作就是驱动步进电动机转到下截止位置,然后再根据高度传感器反馈信号调节到相应位置㊂ 3)步进电动机失步补偿的策略:普通步进电动机仅能实现开环控制,因此在多次调节后可能会出现失步现象,本文采用每次开启前照灯调节功能时发送多个冗余驱动脉冲的方法来补偿可能产生的失步,冗余脉冲个数的选择要综合各方面的因素,选择一个合适的冗余量不仅可以对失步进行有效校正补偿,也能保证步进电动机的使用寿命㊂3.2 高度调节策略 对于灯光高度自动调节系统软件来说,首要的问题是调节策略问题,即如何综合车辆的各种条件及外围环境对灯光高度进行调节,以保证车辆行驶的安全性㊂ 前期需要收集的车辆参数包含:轴距㊁前后离地间隙㊁主驾一人工况下的悬架高度变化㊁主副驾驶各一人的悬架高度变化㊁主驾一人后排两人时的悬架高度变化㊁主驾驶一人后备箱满载时悬架高度的变化㊁车辆满载工况下的悬架高度变化等各种车辆负载情况下的悬架高度变化㊂ 相关法规信息:前照灯作为国家强检项目,必须保证前照灯的灯束在以上不同负载情况下始终满足法规要求的照射角度㊂ 本文中该部分的软件工作主要是: 1)根据前期的标定确定前照灯调节所需高度传感器反馈信号变化的阈值,该阈值的选择决定着车辆在各种负载工况下是否都能满足法规的要求,因此是至关重要的,必须结合具体车辆,并通过借助各种辅助手段进行大量实际测量才能确定合理的阈值㊂ 2)结合车辆其他工况综合判断调节条件㊂ 3)步进电动机的软件驱动是通过8个输出口的输出信号组合来实现通过H桥驱动步进电动机的,本文设定步进电动机的驱动为分步模式(步距角为5°)㊂3.3 软件可靠性设计 在提高硬件可靠性设计的同时,软件可靠性以其设计灵活㊁节省硬件资源及可靠性好等优点越来越受到重视㊂通过软件的手段加强系统运行的可靠性主要有以下几种思路: 1)使用软件的方法抑制叠加在输入信号上的噪声㊂ 2)通过软件的方法来使运行 弹飞”的程序回 归正确的位置或初始化整个系统㊂3.3.1 高度传感器信号消抖处理 行驶中的车量在加速减速或小的颠簸的时候都会造成悬架高度的短时间变化,此时高度传感器的信号也是随之波动的,此时前照灯不应随之频繁调节,因此就需要对传感器反馈的信号进行必要消抖处理㊂本文是采用多次采集后去除最大和最小值然后取平均值的方法来确保采集信号的准确性㊂3.3.2 软件抗干扰 (1)指令冗余设计 MCU取指过程是先取操作码,再取操作数㊂当PC(程序指针)受到干扰出现错误时,程序便脱离正常运行轨道,称之为 弹飞”,此时MCU往往将一些操作数当作指令码来执行,引起程序混乱㊂当程序弹飞到某一条单字节指令上时,便自动纳入正轨,但是当弹飞到某双字节或三字节指令上时,就有可能落到其操作数上,从而继续出错㊂因此,在设计软件时应多采用单字节指令,并在关键地方人为的插入一些单字节指令或将单字节指令重复书写,这便是指令冗余㊂ 本文是在双字节指令和三字节指令后插入两次以上NOP指令㊂这样即使弹飞的程序飞到操作数上,由于空操作指令NOP的存在,也可以避免了后面的指令被当作操作数执行,从而使程序纳入正轨㊂此外,对程序流向起重要作用的指令如返回㊁子程序调用㊁跳转㊁硬件置位清零等指令前插入两条NOP,可以将弹飞的程序纳入正轨,以确保这些重要指令的正确执行㊂使用指令冗余时也要注意: 1)加入太多冗余指令将降低程序的运行效率㊂ 2)对于弹飞到程序区外的情况,将无法保证纳入正轨㊂ (2)设置软件陷阱 如上所述,当弹飞的程序落到非程序区时冗余指令技术就失效了㊂对于此种情况本文采用设置软件陷阱的方法予以解决㊂本文设计的软件陷阱为两条NOP指令加上一条强制跳转指令,这样在软件陷阱捕捉到弹飞的程序后就会自动将之引导到错误处理子程序中了㊂ 本文中软件陷阱设置的位置如下: 1)本文使用的MCU包含14个中断,大部分在本文没有使用,在这些没有使用的中断向量区设置软件陷阱,以捕捉错误的中断㊂ 2)未使用的大片ROM程序存储空间㊂本文中ROM容量为8K字节,由于代码量不大必须在没有使用的存储空间设置多个软件陷阱㊂ 3)表格区域㊂本文中当MCU在进行前照灯高度调节需要进行查表确认调节量;如果程序跑飞到该表格中,软件陷阱就可以捕捉并将之纳入正轨了㊂ 4)程序区,主要是针对程序中可能出现断裂点的地方设置陷阱,这些指令有跳转指令㊁返回指令等㊂ 软件陷阱一般都安排在程序正常执行时不会执行到的地方,因此不会影响程序的执行效率,是一种硬件开销较小的软件抗干扰方法㊂ (3) 看门狗”技术应用 当弹飞的程序在没有碰到冗余指令和软件陷阱之前就已经形成一个死循环的话,以上两种抗干扰方法就失效了㊂对此本文中启用了 看门狗”技术㊂ 本文使用的MCU自带有WDT(看门狗定时器),考虑到本系统的实时性要求不高,设置看门狗刷新周期最大为159ms㊂在软件循环的过程中定期对WDT的值进行刷新,为可靠性考虑每次刷新WDT之前先重置WDTCON(看门狗定时器配置字)㊂4摇总结 利用XC866L⁃4FR单片机的丰富资源和高速运算处理能力作为控制系统的核心,不但可以实现复杂的控制功能,而且硬件电路设计比较简单,文中给出了电源和步进电动机驱动等的原理㊂在可靠性和抗干扰设计方面,采用电源抗干扰设计和步进电动机干扰抑制设计措施大大加强了系统的可靠性㊂另外,本文还给出了软件设计流程,并采用冗余指令㊁软件陷阱和看门狗等软件抗干扰技术对系统可靠性进行了进一步加强㊂参考文献[1] 肖军.现代汽车照明系统新技术[J].汽车维修,2006(9):10.[2] Mike Dale.先进的车辆照明系统[J].汽车维修与保养,2002(10):12.[3] 谢剑.上海通用凯迪拉克CTS轿车智能大灯调节系统原理与电路分析[J].汽车维修,2006(11):16~18.[4] 刘宝延,等.步进电机及其驱动控制系统[M].哈尔滨:哈尔滨工业大学出版社,1997.[5] 马忠梅,等,单片机的C语言应用程序设计(修订版)[M].北京:北京航空航天大学出版社,2003. [6] 马世典.HFUT型主从式激光雕刻机软件系统研究设计[D].合肥:合肥工业大学机械与汽车工程学院,2005.。