转矩脉动抑制
直接转矩控制磁链低频脉动分析及抑制

直接转矩控制磁链低频脉动分析及抑制丁惜瀛夏强赵鑫杨树平刘强(沈阳工业大学电气工程学院,沈阳110023)绱要本文蔗计算杭仿真鳃方法,详细分析了篮接转矩控制系统低频脉动的产生原因,解析了电机温升引起的定子电阻变化对定予磁链的估计精度的影响,提出用改进型磁链观测器替代传统的积分观测器;同时针对低频时逆变器开关频率避低导致转矩脉动增加的问题,细化磁链位置判别,降低传统露壹接转矩控割系统麓低频磁链辣赫,使控刽系统有更高戆嚷应速度和更强戆鲁槔性。
并用M a t l a b/Si m ul i nk软件建立了该直接转矩系统的仿真模型,仿真结果表明了改进方案的有效性。
关键词:直接转矩控嬲;低频脉动;磁链观测器;计算机仿真A na l ys i s and R e st r ai n of L ow Fr equency R i ppl e f or D i r ect T or queC ont r ol of F l ux L i nkageD i n g X i y#,g X i a Q i ng Z h ao x滚Y ang Shupi ng Li u Q i ang(School of E l ect r i ca l E ngi neer i ng,Shenyang U ni ve r si t y of T echnol ogy,Shenyang110023)A bs t r act I n t hi s pa pe r,t he r ea s o n of l o w蠹eq uen cy r i ppl e i n di r ec t t or que cont rol s ys t em i s di s c us s ed usi ng com p ut er s i m ul at i on m et hod,t he i nf l uence of st at o r r e si st a nc e change caused by m ot or t em perat ure r i se t o pre ci si on of st at or f l u x l i nka ge com p ut e is been anal ys ed.T he pap er br i ngs f or w ar d t hat t he t r a di t i on al i n t egr a l ob s er ver s houl d be subst i t ut e d by a novel f l ux obser ver.A i m i ng at t he i nc r ea s ed t or que r i ppl e pr ob l em caus ed by l ow i nver t e r s w i t ch f r equ ency at l ow fr e que ncy,t he pap er re fi ne d t he par t i t i on of f l ux posi t i on t o dec re a se t he l ow f r equ ency f l ux r i ppl e i n t he t r adi t i ona l di r ec t t or que c ont rol,w hi ch m a ke cont rol s ys t em have m or e r a pi d r es ponse s peed and m o r e H i gh l y R ob ust.T he pap er set up s i m ul a t i on m od el of di r ec t t or que c ont r ol s ys t em us i ng M at l a b/Si m ul i nk,t he s i m ul a t i on r esu l t i ndi c at ed t he va l i di t y of t he i m pr oved m e t hod。
抑制无刷直流电机转矩脉动的滑模观测器控制

— —
, i
×
0
1
t 2
1
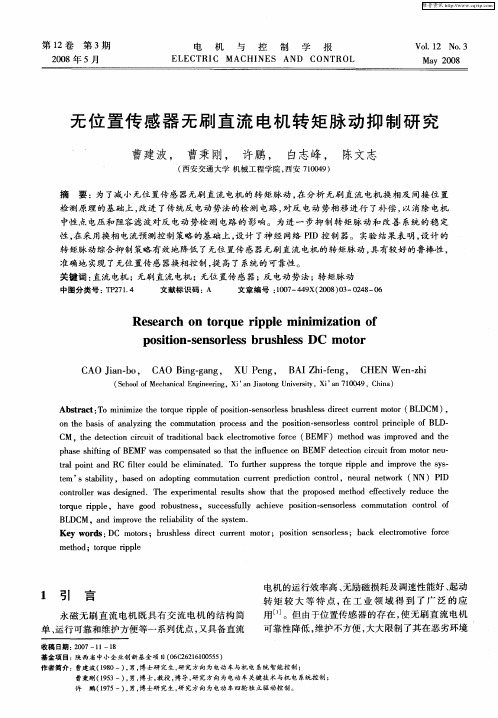
P WM 是 双 管 P WM 调 制 方 式 , 即在
图 1 高速( < 4 E)
-
任意 时刻 导 通 的两 个 功 率 管 同时进 行 P WM 调 制 ,
由式( 1 ) 得功率管 V T 1 , V 过渡到 V T 2 , V r r 3 导通 ,
不确 定 系统控 制 的一 种 有 效 方 法 , 实 现 了 电机定 子
1 无刷直流 电机数学模型和换相转矩脉动 抑制分析
[ 三 i ] = [ i ; ] [ 兰 ] + [ 兰 兰 ] ×
㈩
电流 的精 确估 计 。滑 模 变 结 构 控 制 对 参 数 变 化 和
控制。
通信作者简介 : 黄晓光( 1 9 8 8 一) , 男, 信息与 电气_ [ 程 学院硕士研
究 生 。E — ma i l : 7 3 9 7 0 0 8 2 7 @q q . c o n。
9 6 8 4
科
学
技
术
与
工
程
1 3卷
电机运 动方程 :
j d w
一
相情况 , 换 相引起 转矩增 大 , 转 矩脉动 为 :
⑥
2 0 1 3 S c i . T e c h . E n g r g .
机 电技 术
抑 制 无 刷 直 流 电机 转 矩脉 动 的滑 模 观 测 器 控 制
苗敬 f t . 0 黄 晓光
( 河北工程大学信息与 电气工程学院 , 邯郸 0 5 6 0 0 6 )
摘
要
无刷直流 电机 的转矩脉 动影 响电机整个 系统的性能 , 制 约其在 高精度 、 高稳 定性场合 的应用。为 了抑 制无刷直流 电
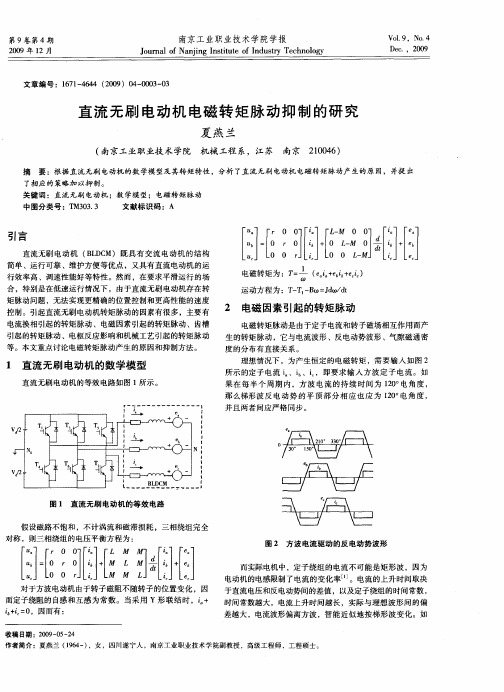
直流无刷电动机电磁转矩脉动抑制的研究
[ ][一莩] ;兰 ]+ ] ; 考三] = [一 詈[ [ ]一 [ +毒
2 电磁 因素引起 的转矩脉动
行效率高 、调速性能好等特性 。然 而 ,在要求平滑运行的场 合 ,特别是在低速运行情况下 ,由于直 流无刷 电动机存在转
矩脉动问题 ,无法实现更精确 的位置控制和更高性能的速度
第 9卷第 4期
李奇贺 ,朱倍芳 :提高纺织印染工业有机热载体锅炉效率 的有效方法
参考文献 :
7
3 结束 语
节约能源是我国节能减排基本国策的重要组成部分 ,是
[ ] 陈鹏 ,韩 立超.导 热油 炉在胶合 板 生产 中应 用的几 个 1
问题 [ ] J .林业科技 ,20 ,2 ( ) 6 4 . 0 2 7 5 :4 — 8 [ ]朱现 卫. 热媒 炉 风 机 的 变频 改 造 [ ] 2 J .聚 酯 工 业 ,
了相 应 的策 略加 以抑 制 。
关键词 :直流无刷 电动机 ;数 学模型 ;电磁 转矩脉动
中 图分 类 号 :T 0 . M33 3 文 献标 识码 :A
引 言
直流无刷 电动机 ( L C B D M) 既具有 交流 电动机 的结构 简单 、运行可靠 、维护方便等优点 ,又具有直流 电动机的运
( .N ni om l nvrt , af g2 0 4 ,C ia 1 aj gN r a i sy N n n 10 2 hn ; n U ei i
2 uh uE e ysv g Tc nl i e i e t , uh u2 0 C ia) .S zo nr - i eh oo e S r c Cne S zo 0 3, hn g an g s ve r 1 5
Tr n f r M a e i lBo l r i x i i tn n e n n u t y a se t ra i n Te tl Pr n i g a d Dy i g I d s r e e
无刷直流电动机转矩脉动及其抑制方法综述
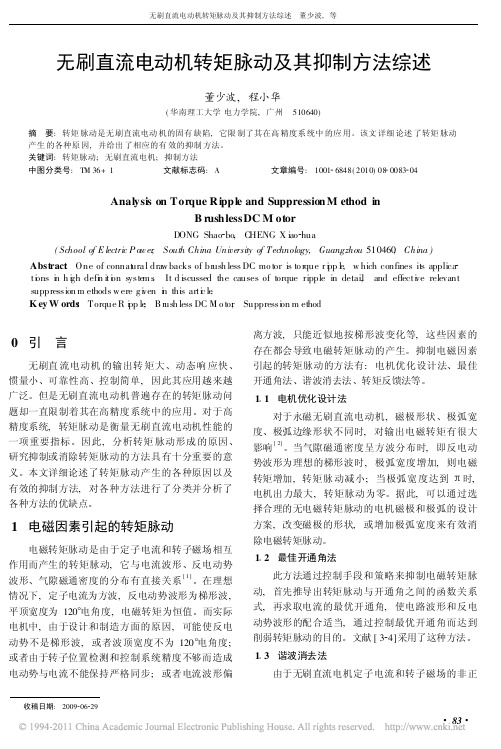
2 电流换向引起的转矩脉动
永磁无刷直流电动机工作时 , 定子绕组按一定 顺序换流, 由于各相绕组存在电感 , 阻碍电流的瞬 时变化 , 每经过一个磁状态 , 电枢绕组中的电流从 某一相切换到另一相时将引起电机转矩的脉动。抑 制由电流换相引起的转矩脉动的方法有 : 电流反馈 法、滞环电流法、重叠换相法、 PWM 斩波法等。 2 1 电流反馈法 非换相相电流的存在导致换相转矩脉动 , 很多 文献通过各种方法致力于使非换相相电流保持恒定 , 从而使转矩脉动为零。 一般来 说, 电流 反馈控制 可以分 为两种 形式 : 一种是直流侧电流反馈控制。其反馈信号由直流侧 取出, 主要控制电流幅值。由于它是根据流过直流 电源的电流信号进行的 , 因此只需要一个电流传感 器便可得到电流反馈信号。文献 [ 6 ] 对此方法进行 了分析。另一种是交流侧电流反馈控制。其反馈信 号由交流侧取出 , 此时 , 根据转子的位置来确定要 控制的相电流, 使其跟随给定。在换相过程中 , 当 非换相电流未到达给定值时 , PWM 控制不起作用 ; 当非换相 电流超过 设定值时 , PWM 控制开 始起作 用 , 关断所有开关器件 , 使电流值下降 , 直至低于 设计值再闭合被关断的开关器件, 使其值上升, 以 此往复 , 即可实现非换相相电流的调节 , 直至换相 完成。 84
董少波, 程小华
( 华南理工大学 电力学院 , 广州 510640) 摘 要 : 转矩 脉动是无 刷直流电动 机的固有 缺陷 , 它限 制了其在高 精度系 统中 的应 用。该文 详细 论述 了转矩 脉动 产生 的各种原 因 , 并给出 了相应的有 效的抑制 方法。 关键词 : 转矩脉动 ; 无刷直流电机 ; 抑制方法 中图分类号 : TM 36+ 1 文献标志码 : A 文章编号 : 1001 6848( 2010) 08 0083 04
无位置传感器无刷直流电机转矩脉动抑制研究
曹建 波 , 曹秉 刚 , 许 鹏 , 白志 峰 , 陈文 志
( 安 交 通 大 学 机 械 工 程 学 院 , 安 7 04 ) 西 西 10 9
摘
要 :为 了减 小 无位置传 感 器无刷 直流 电机 的转 矩 脉动 , 分析 无 刷 直流 电机 换 相及 间接 位 置 在
检 测 原理 的基础 上 , 改进 了传 统反 电动 势法 的检 测 电路 , 对反 电动 势相 移 进行 了补偿 , 消除 电机 以 中性 点 电压 和 阻容 滤 波对反 电动 势检 测 电路 的影 响 。 为进 一 步抑 制 转 矩 脉 动 和 改善 系统 的稳 定 性 , 采用换 相 电流预 测控制 策略 的基础 上 , 计 了神 经 网络 P D控 制 器。 实验 结 果表 明 , 计 的 在 设 I 设 转矩脉 动综 合抑制 策略 有效地 降低 了无位 置传 感 器无刷 直流 电机 的转 矩脉 动 , 具有 较好 的鲁棒 性 , 准确地 实现 了无位 置传 感 器换 相控 制 , 高了 系统 的可 靠性 。 提 关键词 : 直流 电机 ;无刷直 流 电机 ;无位 置 传感 器 ;反 电动 势法 ;转矩脉 动
t l on n i e o l e e i n t d T u t e u p e s t e tr u p l n mp o e t e s s r i ta d RC f t rc u d b l a p l mi ae . o f rh r s p r s h o q e r pe a d i r v h y 。 i
无刷直流电机转矩脉动抑制研究_吴一欣
SRM转矩脉动抑制的控制策略分析
2 .中国科 学技 术 大 学 信 息科 学技 术 学院 , 徽 合 肥 2 0 2 ; 安 3 0 7 3 .舍 肥 工业 大 学 电气与 自动化 工程 学院 , 徽 合 肥 2 0 0 ) 安 3 0 9
摘 要 : 关 磁 阻 电 机 运 行 中转 矩 脉 动 比较 明显 , 开 由此 引起 的 电机 噪 声 及 转 矩 波 动 制 约 了 其 在 高 性 能 控 制
a d T c n lg f C ia, n eh oo y o h n He 2 0 2 , h i C ia; .Colg f Elcrc l n 3 0 7 An u , h n 3 le eo etia d a
Auo t n iern t ma i E g n ei g,He e n v ri f T c n lg , f i 3 0 9 An u , h n ) c f i ie s y o eh oo e He e 2 0 0 , h iC ia U t
领 域 的 应 用 。优 化 电机 的 结构 设计 及 采 用 合 适 的 控 制 技 术 是 抑 制 开 关 磁 阻 电 机 转 矩 脉 动 的 2种 主 要 方 法 。 在 对 开 关 磁 阻 电 机 转 矩 脉 动 产 生 机 理 分 析 的基 础 上 , 控 制 的 角 度 综 述 了 开 关 磁 阻 电 机 转 矩 脉 动 抑 制 的 若 从
( .De a t n f Elcr n c n e tia g n e ig, fe iest He i2 0 0 , 1 p rme to e to isa d Elcrc lEn ie rn HP iUn v ri y, fe 3 6 1
An u , h n ; .S h o f I f r t n S in e n eh oo y, n v ri f S i c h i C ia 2 c o l n o mai ce c d T c n lg U iest o ce e o o a y n
无刷直流电机换相转矩脉动抑制新策略

电 气 传 动 2 1 0 2年 第 4 2卷 第 1 O期
E E T I R VE 2 1 V 1 2 No 1 L C RCD I 02 o. 4 .0
无 略
王 会 明 , 学 明 , 武 丁 尹
( 上海理 工 大学 光 电信 息与计 算机 工程 学院 , 上海 2 0 9 ) 0 0 3
duc d; Fi a l t r ug t on r e n ly, h o h he c t olon— l i e ofc ndu tng s a e M 0 SFET , m o or lc r m a a ltm o c i t t t ee t o gne i or ue tc t q rp ec n bem i i u . T hee e i e tpr e h op e m p o d p s d h o l to m e ho a f i pl a nm m xp rm n ov s t e pr os d i r ve ule wi t m du a in t d c n e — f ci e y r s r n t e t q i pl nd i p o e s t m ror a e e tv l e tai h or ue rp e a m r v yse pe f m nc .
动 最 小 。实 验 证 明 , 出的 改 进 脉 宽 调 制 方 法 能 有 效 地 抑 制 转 矩 脉 动 , 高 系 统 性 能 。 提 提 关 键 词 : 刷 直 流 电机 ; 电 流 ; 矩 脉 动 ; 宽 调 制 无 相 转 脉
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
International Journal of Automotive Technology, Vol. 12, No. 2, pp. 291−297 (2011)DOI 10.1007/s12239−011−0034−8Copyright©2011KSAE
1229−9138/2011/057−16
291TORQUE RIPPLE MINIMIZATION CONTROL OF PERMANENTMAGNET SYNCHRONOUS MOTORS FOR EPS APPLICATIONS
G. H. LEE1), W. C. CHOI1), S. I. KIM2), S. O. KWON2) and J. P. HONG2)*
1)Graduate School of Automotive Engineering, Kookmin University, Seoul 136-702, Korea2)Department of Automotive Engineering, Hanyang University, Seoul 133-791, Korea
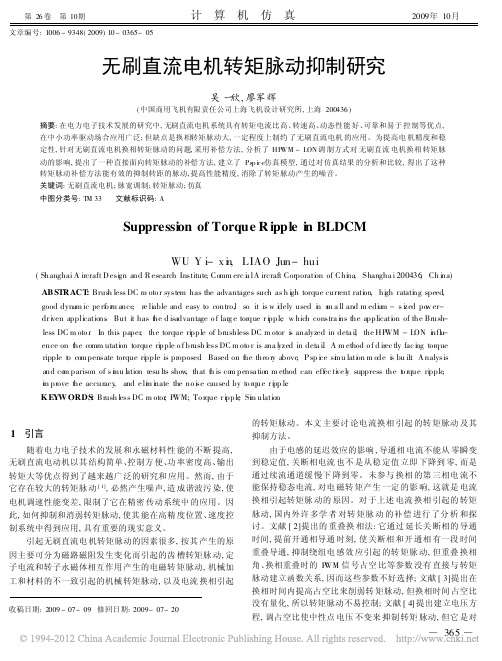
(Received 18 February 2009; Revised 9 August 2010)ABSTRACT−This paper identifies a control method used to reduce torque ripple of a permanent magnet synchronous motor(PMSM) for an electric power steering (EPS) system. NVH (Noise Vibration Harshness) is important for safe and convenientdriving. Vibration caused by motor torque is a problem in column type EPS systems. Maintaining a very low torque ripple isone solution that allows for smoother steering. Theoretically, it is possible to design and drive the motor without torque ripple.However, in reality, a PMSM system torque ripple is caused by the motor itself (saturation in the iron core and EMF distortion)and the imperfect driver. This paper analyzes torque ripple of a PMSM system, and an advanced PMSM control method forthe column typed EPS system is presented. Results of the analysis indicate that the compensation current is needed in orderto minimize torque ripple when a PMSM is driven.
KEY WORDS:Electric power steering, Magnetic saturation, PMSM, Torque ripple, Deadtime, EMF distortion
1. INTRODUCTIONResearch is being performed to improve the fuel efficiencyof vehicles. One of the main areas of focus is on thesteering of auxiliary equipment. Electric Power Steering(EPS) is receiving more attention than Hydraulic PowerSteering (HYPS). Electric power steering (EPS) is a systemthat supplies motor power directly to the steering to assiststeering torque while HYPS uses an oil pump that is drivenby the engine (Shimizu and Kawai, 1991). A permanent magnet synchronous motor (PMSM) hasbeen used to improve the performance of EPS. Since aPMSM has many advantages, such as high efficiency andhigh torque per rotor volume, it is especially suitable forautomotive applications in which space and energy savingsare critical (Miyoshi et al., 2005). In a column type EPSsystem, the PMSM is linked to the steering shaft via areduction gear. This connection transfers the motorvibration and torque fluctuation directly through thesteering wheel to the hands of the driver (Zhang et al.,2008). For this reason, only the ripple between one andthree percent of rated torque is permitted. Several technical papers have presented a motor designandcontrol technique to reduce cogging torque and torquepulsation (Islam et al., 2005; Mattavelli et al., 2005; Bianchiet al., 2002; Lee et al., 2008). However, this paper discussesan estimation method of compensation current for suppress-
ing torque ripple caused by a PMSM (Lee et al., 2008).In an EPS application, the magnetic saturation in thestator core and distortion of EMF is inevitable due tospatial and cost limitations(Lee, 2010). Imperfections of alow voltage inverter for EPS can be severe. This paper alsoanalyzes torque ripple caused by the motor, deadtimeeffects, and current offset problems of the PMSM driver.The harmonic current distribution is calculated using finiteelement analysis, and the effective dead time compensationmethod is proposed.
2. TORQUE RIPPLE OF PMSM2.1. Torque Ripple of PMSM for the EPSFigure 1 indicates a fabricated PMSM for the column typeEPS system. The rotor configuration was skewed to reducecogging torque. Segment type and ring type rotors are usedfor the purpose of this research. The specifications for aPMSM are listed in Table 1. Cogging torque and totalharmonic distortion (THD) of a back-EMF required in themotor are less than 0.02 Nm and 0.7% respectively. If therotor of a SPMSM is composed of segment-type permanentmagnets, there is relatively low THD in the back-EMF(0.7%). A ring-type magnet has a higher THD in the back-EMF (2.3%) and an acceptable level of productivity.The torque waveforms of segment and ring magnets areshown in Figure 2. In order to measure torque rippleaccurately, the motor is driven at 10 rpm, and input currentis controlled with a THD less than 0.5%. As the magnetictorque increases, the electric frequency increases by a*Corresponding author. e-mail: hongjp@hanyang.ac.kr