雷达原理作业4-2016
雷达原理_第六章-目标距离的测量

6.1 脉冲法测距
本振
门限
Σ
匹配
包络
微分
过零点
滤波器
检波
(d / dt)
检测
t
t
图6.3 回波脉冲中心估计
6.1 脉冲法测距
• 前沿法:以目标回波脉冲的前沿测量到达时间 特点:物理概念清楚(适用于人工测量) 前沿受回波大小及噪声影响
1
最大作用距离 Rmax
2
109
4
2
7 1.22 4
0.12 109.757
50
4
750Km
第五章 作业解题方法
15 、 解 : 直 视 距 离 4.1 1000 200 187 .6Km , 接 收 带 宽
1.37
B
0.85625MHz
1.6 106
脉
冲
积
累
数
n
60 6
1.5 400 16.7 360
t
R
2R c
R
1 2
ct R
(6.0.1)
概述
B R
A
图6.1 目标距离的测量
概述
而时间tR也就是回波相对于发射信号的延迟,因此, 目标距 离测量就是要精确测定延迟时间tR。根据雷达发射信号 的不同,测定延迟时间通常可以采用:
❖ 脉冲法 ❖ 频率法 ❖ 相位法
6.1 脉冲法测距
6.1.1 基本原理
4 2
62
0.12
4 15
109.04
4
194Km
第五章 作业解题方法
与直视距离综合后为
187.6Km。仰角为
雷达基本工作原理课件-新版.ppt

微波传输线 发射脉冲
发射机
T/R 触发器
天线 回波
接收机
电源
船电
显示器
Fig1-2 (2)
回波 船首线 方位
精品
T/R
Receiver
Transmitter
第二节 雷达的基本组成、作用
一、基本组成七部分及作用:
1、定时器(触发电路、同步电路等): 是雷达的指挥中心,产生周期性的窄脉冲——触发脉冲 送:1)发射机:控制发射开始 2)接收机:控制近距离增益 3)显示器:控制计时开始
船舶导航雷达
精品
第一章 雷达基本工作原理
引言
Radar —Radio detection and ranging
—无线电探测和测距
雷达:发射微波并接收目标反射回波,对目标进行探测 和测定目标信息
现代雷达 IBS的重要组成部分 定位、导航、避碰
主要传感器
精品
雷达 罗经 计程仪 GNSS AIS ECDIS
二、船用雷达单元构成:
1、三单元雷达: 收发机(触发电路、发射机、接收机、收发开关) 显示器、天线、中频电源
2、二单元雷达: 天线收发机、显示器、精中品频电源
荧光屏的单位长度:在不同量程代表不同的距离
二. 雷达测方位原理
1、利用收发定向天线 ,只向一个方向发射雷达波且 只接收此方向上的目标的反射回波
2、天线旋转依次向四周发射雷达波,则可探知周围 物标的方位——天线的精品方向即目标的方向
触发器
天线
方位与 船首线
收发机 回波
显示器
ARPA
Fig1-2(1)
第二节 雷达的基本组成、作用
5、接收机:超外差式,将微弱回波信号放大千万倍以符合
电子科技大学-雷达原理XXXX

绪论——雷达的历史与发展
二次大战中和大战后
– 微波雷达(1941,英美S/X波段雷达) – PPI显示 – 超外差接收
绪论——现代雷达
AN TPS-75v长程对搜索雷达(台空军东引岛)
绪论——现代雷达
绪论——现代雷达
中国炮瞄雷达
绪论——现代雷达
美国炮瞄雷达
绪论——现代雷达
雷神GBR
绪论——现代雷达
雷神GBR
绪论——现代雷达
AN FPS-85 相控阵空间监视雷达
绪论——现代雷达
COSMO-SkyMed 雷达卫星
绪论——现代雷达
美军天基雷达
绪论——现代雷达
美军SBX雷达
天线噪声:主要包括热噪声和宇宙噪声,当接收机电阻与天线辐 射电阻匹配时,功率NA=kTABn
等效噪声带宽:
H ( f ) 2df
Bn 0 H ( f0 ) 2
雷达接收机——接收机噪声系数
噪声系数与噪声温度
噪声系数:
F Si / Ni Si No 1 NiG N 1 N 1 N
So / No So Ni G Ni
工作带宽
接收机频率变化范围 抗干扰性能:需要大带宽 高灵敏度:窄带宽
动态范围
接收机正常工作容许的输入信号强度的变化范围 从Si,min-接收机过载时的输入信号功率
中频的选择和滤波特性
接收机中频的选择:取决于发射波形、接收机工作带宽、前端器 件性能 滤波特性:匹配滤波
雷达接收机——主要技术指标
tr:电磁波往返时间
雷达的距离分辨力为:
R
c
2
雷达原理与系统知识要点总结(必修)
雷达原理与系统(必修)知识要点整理第一章:1、雷达基本工作原理框图认知。
2、雷达面临的四大威胁3、距离和延时对应关系4、速度与多普勒关系(径向速度与线速度)5、距离分辨力,角分辨力6、基本雷达方程(物理过程,各参数意义,相互关系,基本推导)7、雷达的基本组成(几个主要部分),及各部分作用第二章雷达发射机1、单级振荡与主振放大式发射机区别2、基本任务和组成框图3、峰值功率、平均功率,工作比(占空比),脉宽、PRI(Tr),PRF(fr)的关系。
第三章接收机1、超外差技术和超外差接收机基本结构(关键在混频)2、灵敏度的定义,识别系数定义3、接收机动态范围的定义4、额定噪声功率N=KTB N、噪声系数计算及其物理意义5、级联电路的噪声系数计算6、习题7、AGC,AFC,STC的含意和作用第四章显示器1、雷达显示器类型及其坐标含义;2、A型、B型、P型、J型第五章作用距离1、雷达作用距离方程,多种形式,各参数意义,PX=?Rmax=?(灵敏度表示的、检测因子表示的等)2、增益G和雷达截面A的关系2、雷达目标截面积定义3、习题4、最小可检测信噪比、检测因子表示的距离方程5、奈曼皮尔逊准则的定义6、虚警概率、检测概率、信噪比三者关系,习题.(会看图查数)由概率分布函数、门限积分区间表示的各种概率形式;7、为什么要积累,相参积累与非相参积累对信噪比改善如何,相参M~M倍。
8、积累对作用距离的改善,(方程、结论、习题)9、大气折射原因、直视距离计算(注意单位Km还是m)10、二次雷达方程、习题。
11、分贝表示的雷达方程,计算、习题,普通雷达方程的计算。
第六章距离测量1、R,tr,距离分辨力、脉宽、带宽关系2、最短作用距离、最大不模糊距离与脉宽、重频关系3、双重频判距离模糊、习题。
4、调频连续波测距原理,(距离到频率的转换,简单推导),测速。
5、相位差与距离的关系6、习题第七章测角1、相位测角原理(路程差与相位差的相互补偿)2、三天线测角原理、习题。
雷达原理作业1-2013(1)
1、 雷达的主要功能是_______________________________, 雷达所测量的目标的 主要参数一般包括______________________________。 2、雷达所面临的四大威胁是___________________________________________。 3、对常规脉冲雷达,其距离分辨力由 决定。 4、雷达测距的基本原理是____________________________________________, 测角的基本原理是____________________________________________, 测速的 基本原理是_____________________________。对脉冲雷达而言,其距离分辨 力由 决定。 5、在雷达工作波长一定的情况下,要提高角分辨力,必须__________________。 6、常用的雷达波束形状包括 和 。 7、已知某雷达为 X 波段,天线尺寸为 0.6 m(方位向)×0.5 m(俯仰向),设 k=1.3,求雷达方位和仰角分辨力,求天线的增益(用 dB 表示)
8、雷达主要由哪几部分所组成?简述各部分的功能。
9、 已知某相参体制脉冲雷达参数为: 波长 λ= 3.3 cm, 发射机功率 Pt = 20 kw, 收 发天线增益均为 G=45 dB, Bn = 50 MHz, Fn = 5 dB, L= 6 dB. 系统要求的检测 概率为 95%,虚警概率为 10-8 。 1)求 目标 σ=0.3 m2 时,雷达的最大探测距离; 2)其他条件和要求不变时,若积累 50 个脉冲后进行目标检测, (假设积累效率 为 90%),发射功率可降至多少?此时的接收机灵敏度要求是多少?
雷达原理.docx
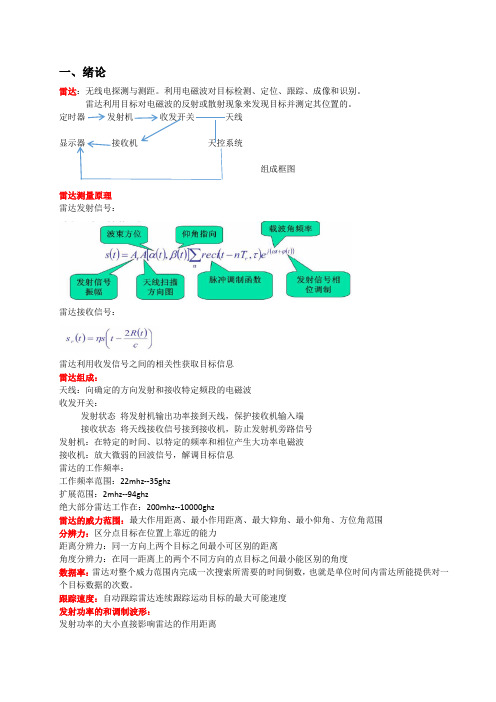
一、绪论雷达:无线电探测与测距。
利用电磁波对目标检测、定位、跟踪、成像和识别。
雷达利用目标对电磁波的反射或散射现象来发现目标并测定其位置的。
组成框图雷达测量原理雷达发射信号:雷达接收信号:雷达利用收发信号之间的相关性获取目标信息雷达组成:天线:向确定的方向发射和接收特定频段的电磁波收发开关:发射状态将发射机输出功率接到天线,保护接收机输入端接收状态将天线接收信号接到接收机,防止发射机旁路信号发射机:在特定的时间、以特定的频率和相位产生大功率电磁波接收机:放大微弱的回波信号,解调目标信息雷达的工作频率:工作频率范围:22mhz--35ghz扩展范围:2mhz--94ghz绝大部分雷达工作在:200mhz--10000ghz雷达的威力范围:最大作用距离、最小作用距离、最大仰角、最小仰角、方位角范围分辨力:区分点目标在位置上靠近的能力距离分辨力:同一方向上两个目标之间最小可区别的距离角度分辨力:在同一距离上的两个不同方向的点目标之间最小能区别的角度数据率:雷达对整个威力范围内完成一次搜索所需要的时间倒数,也就是单位时间内雷达所能提供对一个目标数据的次数。
跟踪速度:自动跟踪雷达连续跟踪运动目标的最大可能速度发射功率的和调制波形:发射功率的大小直接影响雷达的作用距离发射信号的调制波形:早期简单脉冲波形,近代采用复杂波形脉冲宽度:脉冲雷达发射信号所占的时间。
影响探测能力和距离分辨力重复频率:发射机每秒发射的脉冲个数,其倒数是重复周期。
决定单值测距的范围,影响不模糊速区域大小天线波束形状天线:一般用水平面和垂直面内的波束宽度来表示天线的扫描方式:搜索和跟踪目标时,天线的主瓣按照一定规律在空间所作的反复运动。
机械性扫描和电扫描接收机的灵敏度:通常规定在保证50%、90%的发现概率条件下,接收机输入端回波信号的功率作为接收机的最小可检测信号功率。
这个功率越小接收机的灵敏度越高,雷达的作用距离越远。
显示器的形式和数量:雷达显示器是向操纵人员提供雷达信息的一种终端设备,是人际联系的一个环节。
雷达大作业-振幅和差单脉冲雷达在自动测角系统中的应用.docx

雷达原理大作业振幅和差单脉冲雷达在自动测角系统中的应用指导老师:魏青振幅和差脉冲测角基本原理单脉冲自动测角属于同时波瓣测角法,在一个角平面内,两个相同的波束部分重叠,交叠方向即为等信号轴的方向。
将这两个波束接收到的回波信号进行比较,就可取得目标在这个平面上的角误差信号,然后将此误差电压放大变换后加到驱动电动机控制天线向减小误差的方向运动。
因为两个波束同时接收到回波,故单脉冲测角获得目标角误差信息的时间可以很短,理论上只要分析一个回波脉冲就可以确定角误差,所以叫“单脉冲”。
这种方法可以获得很高的测角精度,故精密跟踪雷达通常采用它。
由于取出角度误差信号的具体方法不同,单脉冲雷达的种类很多,应用最广的是振幅和差式单脉冲雷达,该方法的实质实际上是利用两个偏置天线方向图的和差波束。
和差脉冲法测角的基本原理为:①角误差信号。
雷达天线在一个角平面内有两个部分重叠的波束如错误!未找到引用源。
所示:振幅和差式单脉冲雷达取得角误差信号的基本方法是将这两个波束同时收到的信号进行和差处理,分别得到和信号和差信号。
与和差信号相应的和差波束如错误!未找到引用源。
(b) (c)。
振幅和差式单脉冲波束图(a)两波束;(b)和波束;(c)差波束其中差信号即为该角平面内的角误差信号。
若目标处在天线轴向方向(等信号轴),误差角为零,则两波束收到的回波信号幅度相同,差信号等于零。
目标偏离等信号轴而有一误差角时,差信号输出振幅与误差角成正比,而其符号(相位)则由偏离的方向决定。
和信号除用作目标检测和距离跟踪外,还用作角误差信号的相位基准。
②和差波束形成原理:和差比较器是单脉冲雷达的重要部件,由它完成和差处理,形成和差波束。
以错误!未找到引用源。
(a)中的双T接头为例,它有四个端口,∑(和)端、△(差)端和1、2端,这四个端口是匹配的。
发射时,从发射机来的信号加到和差比较器的∑端,1、2端输出等幅同相信号,△端无输出,两个馈源同相激励,并辐射相同功率,结果两波束在空间各点产生的场强同相相加,形成发射和波束。
雷达原理模拟题及参考答案

模拟题1一、填空(每空1分,总共25分)1. 英文“Radar ”(音译雷达)的中文含义_________________。
2. 雷达发射机分为 和 两大类,全相参系统是指 。
3. 在满足直视距离条件下,如果保持其它条件不变(其中天线有效面积不变),将雷达发射信号的频率从1GHz 提高到4GHz ,则雷达作用距离是原来的___ ____倍。
4. 用带宽是5Hz 的测试设备测得某发射机在fm=400Hz 处分布型寄生输出功率是20μw ,信号功率是100mw ,则发射机在400Hz 处的频谱纯度是_______________________。
(此题必须注明单位,否则零分) 5. 某软性开关调制器如下图所示:LchL1L1L1C1C1C1n1n2R变压器磁控管等效电阻R=400欧姆,负载匹配,脉冲变压器的初级匝数n1=1000,次级匝数n2=2000,Lch =40H ,=2000Hz ,则L r f 1= ,C1= 。
(此题必须注明单位,否则零分) 6. 某雷达检测的门限电平V T =4V ,高斯噪声的均方根值V 1=σ,此雷达的虚警概率是 。
7. 三角波调频测距系统,调频斜率ms MHz /3=μ,目标到雷达的距离是80Km ,频率计指示读数为______________。
(此题必须注明单位,否则零分)8. 某警戒雷达发射脉冲为脉宽为2μs 的矩形脉冲,接收匹配滤波器采用矩形滤波器,最佳带宽脉宽积为1.37,不考虑剩余失谐,则接收机中频通道的最佳带宽为______第2页 共7页____。
(此题必须注明单位,否则零分)9. 雷达脉冲积累对雷达检测性能有所改善,M 个脉冲的相参积累可以使雷达信号的输出信噪比提高为不积累的 倍。
10. 某脉冲雷达脉冲宽度为1.5微秒,则其最小可分辨距离为: 米。
11. 若雷达探测的目标是一架飞机,雷达的发射频率是,若飞机以100m/s 的速度绕雷达做圆周运动,则雷达接收到的目标回波信号的频率是 GHz 1Hz 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《雷达原理》作业,No.4
递交日期:2016.4.20
1. 对固定目标和运动目标的相干脉冲多普勒雷达回波,分别通过相位检波器后,输出信号的主要区别是,回波脉冲在距离显示器上的主要区别是 .。
2、雷达动目标显示系统的作用是,常用的实现动目标
显示的方法是。
3、雷达的盲速效应是指,出现盲速的条件是,要提高第一等效盲速,采取的措施有,频闪效应是指,出现频闪的条件是。
4、对于PRF为1KHz、波长3cm的脉冲多普勒雷达,它的第一盲速为( )米/秒,当目标速度大于( )米/秒时,会出现频闪效应。
为了消除盲速现象,可以采用( )。
5. MTI滤波器的凹口宽度应该( ),通带内的频响要求( )。
6. 在MTD中,如果采用N=256的滤波器组,PRF为1KHz,则能检测运动目标的分辨率是();与MTI系统相比,其信噪比提高了()倍,分辨力提高了()倍。
7. 说明采用参差重复频率提高第一盲速的基本原理。
8. 如果雷达系统的PRF为1 KHz,工作频率为3 GHz, 气象杂波(云)的径向运动速度为10m/s,试设计一个一阶的MTI对消器。
9. 若目标的最大径向速度为120m/s,雷达的工作波长为2cm,脉冲重复频率为1500Hz,则雷达对该目标测量时,会不会出现盲速和频闪现象?为什么?
10. 什么是点盲相?什么是连续盲相?试画出点盲相和连续盲相出现时鉴相器的矢量图。
11. 作图描述地面雷达的杂波和动目标频谱,并以一次对消器为例说明MTI处理的基本原理。
比较一次对消器和二次对消器的基本结构及滤波特性,说明二次对消器在抑制固定杂波上的优点。