船舶耐波性横摇减摇装置.
减摇鳍装置是一种最常用的主动式横摇减摇装置

1 引言减摇鳍装置是一种最常用的主动式横摇减摇装置,一般分为固定式和收放式两种。
固定式减摇鳍的鳍从两弦伸出船体,安装于水线下的一定深度处,如图1所示。
减摇鳍减摇效果取决的因素很多,其中控制系统的性能优劣是其关键因素之一。
可编程控制器(Programmable Logic Controller,简称PLC)是将计算机技术、通信技术和自动控制技术结合在一起的自动控制设备,具有可靠性高、体积小、功耗低、抗干扰能力强等诸多优点。
PLC在减摇鳍控制系统中应用,可保证其在温度和湿度都较高、空间较小、工作环境恶劣的机舱里稳定、可靠、长时间连续地工作。
2 减摇鳍装置工作原理减摇鳍装置作为一个自动控制装置,它可以分成三部分:鳍机械组合体,驱动鳍的随动系统和控制系统部分。
当舰船在风浪中航行产生横摇时,控制系统通过角速度陀螺仪采得舰船横摇的信息,通过一系列的运算处理后得到鳍角控制信号,经放大后送到电液随动系统,电液随动系统根据鳍角控制信号驱动鳍按指定动作运行。
船体两边的鳍在液压驱动力和水动力的共同作用下,产生稳定力矩来平衡波浪对舰船产生的扰动力矩,以达到减摇的目的。
该稳定力矩和波浪的扰动力矩大小尽量相同,方向却正好相反,称之为平衡力矩。
减摇鳍装置工作原理框图如图2所示。
3 减摇鳍控制系统结构和程序设计3.1 减摇鳍控制系统结构以某型舰艇上减摇鳍系统为例,改造前其控制系统是采用多块模拟电路板来实现对舰船横摇信息和其他辅助信息的采集、运算和处理,然后再将得到的鳍角控制信号经放大后送给电液随动系统,这样的控制系统不仅十分复杂,而且体积大、可靠性不高。
随着计算机技术的飞速发展,在继电器控制和计算机控制基础上开发的工业控制装置PLC可以很好地解决这些问题。
在对减摇鳍控制系统进行数字化改造中,我们选用的是松下FP∑型PLC,具体型号是FPG-C32T,这型PLC主机的输入输出点分别为16点,程序容量为12000步,运算速度是0.4μs/步,工作环境温度可达55℃,而且拥有4路高速输入输出通道和易于实现多P LC间的高速通信等优点。
桶式船舶减摇装置设计

在船舶的研究中,船舶的横摇是一个重要方面。
横摇的研究大致上从两个方面开展,一个是线性研究,一个是非线性研究。
本文拟设计出一种简便的船舶减摇装置,通过采用线性计算方式来检验装置的可行性。
首先是建立船舶的模型,在此基础上加载环境载荷,计算船舶在加减摇装置和未加减摇装置两种状态下的横摇响应算子,通过计算对比响应算子来检验减摇装置的效果。
首先用MOSES 软件建立船舶模型,初始状态下以静水面为XOY 平面,以船舶的方向为X 方面,垂直轴为OZ 轴。
坐标的建立符合右手定则,然后加载环境载荷,如表1所示。
(海洋石油工程(青岛)有限公司,青岛 266520)摘 要:随着船舶工业技术的飞速发展,船舶在航行中,过大的横摇对航速和安全性的影响最大。
如何减小船舶的横摇问题,一直是船舶研究的一个重点。
于是,设计了一种在大型油轮行进过程中的一种减摇装置——桶式船舶减摇装置。
该装置是在船舶两侧增加桶式的放入海水的水罐,通过增加惯性矩和阻尼矩,以增大稳定力矩。
关键词:减摇桶 横摇 减摇装置 响应算子表1 海洋环境条件水深有义波高波普风速风向流速流向31m4mJonswap7.7m/s180/150 deg1.73m/s180/150 deg1 桶式减摇装置的设计原理船舶的固有周期的余弦函数,横摇的幅值出现周期性变化。
当波浪周期、船舶周期和减摇桶的周期相等时达到共振,幅值最大。
所以,设计减摇装置的原理就是减少共振。
T B =T θ=T W (1)式中:T B 为波浪周期;T θ为船舶横摇固有周期;T W 为桶的固有周期。
船舶的固有周期是固定的,桶的振动周期滞后于船舶的波倾角90°。
船舶共振即T B =T θ时,船的横摇角滞后波倾角90°;当T θ=T W 时,由于波倾角的滞后,波浪力矩和桶的扰动力矩抵消,以便起到减少横摇的目的。
响应算子是船舶在运动过程中单位波幅上的运动传递,可以简单认为是幅值的放大倍数。
响应算子可写为:i()(,,)Re (,)e t R t A H ωϕωβωβ+ =⋅⋅(2)(,)i tan RE IMIM RE H H H H a Hωβϕ=+=(3)式中:A 为遭遇波波幅,m ;β为浪向角,deg ;ω为波频,rad/s ;t 为时间,s ;H (ω,β)为响应算子;φ为响应滞后于简谐波的相位角,deg 。
第 6 章 船舶的摇摆与操纵性 (1)
静水中自由摇摆
1)船舶在静水中的无阻尼摇摆 船舶在静水中的无阻尼摇摆也称为自由摇 摆 是船舶摇摆运动的 种最简单的情 摆,是船舶摇摆运动的一种最简单的情况。 船舶在静水中的无阻尼摇摆规律为:
m cos(nt )
9
船舶无阻尼摇摆周期常用的计算公式有:
T 0.58 f
2 B 2 4Z g
轮机 轮机工程本科专业主干课 本科专业主干课
船舶原理
授课教师 杜敬涛 授课教师:杜敬涛
哈尔滨工程大学 动力与能源工程学院
1
课程内容
第一章 绪论 第二章 船舶浮性、稳性及抗沉性 船舶浮性 稳性及抗沉性 第三章 船舶强度与结构 第四章 船舶阻力 第五章 船舶推进 第六章 船舶摇摆与操纵性
2
6.1 船舶摇摆的基本概念
在实际中,船舶是以 定的航速和航向航 在实际中,船舶是以一定的航速和航向航 行的。
16
波浪相对于船舶运动的 周期称为船舶的遭遇周期或 表观周期。
Tk Vw V cos
w
遭遇周期实质上是波浪作用于船舶的扰动 力的实际周期 因此 在讨论有航速与航向的 力的实际周期,因此,在讨论有航速与航向的 横摇问题时,需要以遭遇周期来代替波浪周期。
6
4)船舶摇摆运动参数 最大摆幅 最大摆 周期 摆程 频率 全摆程
7
6.2 船舶摇摆运动规律
船舶在水面上的摇摆,根据周围水流运动 状态可分为静水中的摇摆和波浪中的摇摆。 状态可分为静水中的摇摆和波浪中的摇摆 无阻尼 静水中的摇摆 船舶摇摆 波浪中的摇摆 浪中 摆 波浪运动
8
理想流体 真实流体
有阻尼
1)船舶摇摆 船舶在多变的海况中的运动性能,称为适 航性,也称耐波性。 包括摇摆、失速、甲板上浪、船底抨击等, 通常指船舶在风浪中的摇摆性能 船舶摇摆是 通常指船舶在风浪中的摇摆性能。船舶摇摆是 指船舶绕某轴或沿某轴(x, y, z轴)所做的往复 运动 即6个自由度方向的运动性能。 运动,即 个自由度方向的运动性能
船舶控制复习资料-减摇水舱
4.减摇水舱4.1 概述在船舶横摇减摇领域,减摇鳍是最常用且减摇效果最好的主动式减摇装置,但是传统减摇鳍的减摇能力与船舶航速有关;在低航速或零航速情况下,传统减摇鳍基本没有减摇效果;减摇水舱是另一种减摇装置,其在全航速下都能起到减摇效果,并且能够抗船舶横倾,破冰作业及其倾斜试验等;减摇水舱结构简单、造价低廉,便于维护保养,但是需要占用一定的甲板面积,因此常见于渡轮、集装箱船、科学考察船、抢险船、巡逻船、海洋救生船等。
4.2减摇水舱的发展现代意义上的减摇水舱的研究可以追溯到1860年,但是首次把水舱作为固定的减摇设备是1880年装于英国皇家海军潜艇“Inflexible ”号上。
这些早期采用的水舱为被动式平面减摇水舱,通过阻尼隔壁增加水舱阻尼特性。
从设计水平来看,这类水舱对水舱的减摇原理已经有相当的见解,但是,这类水舱由于占用空间大、噪声高等原因,而被废弃不用。
此后,И.Г.布勃诺夫、霍特、C .O.马卡洛夫等人先后对利用水舱减摇问题进行了研究[18]。
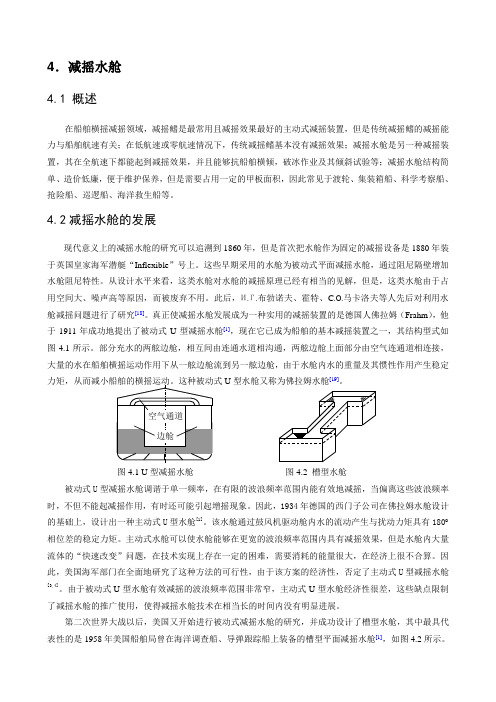
真正使减摇水舱发展成为一种实用的减摇装置的是德国人佛拉姆(Frahm ),他于1911年成功地提出了被动式U 型减摇水舱[1],现在它已成为船舶的基本减摇装置之一,其结构型式如图4.1所示。
部分充水的两舷边舱,相互间由连通水道相沟通,两舷边舱上面部分由空气连通道相连接,大量的水在船舶横摇运动作用下从一舷边舱流到另一舷边舱,由于水舱内水的重量及其惯性作用产生稳定U 型水舱又称为佛拉姆水舱[19]。
图4.1 U 型减摇水舱 图4.2 槽型水舱被动式U 型减摇水舱调谐于单一频率,在有限的波浪频率范围内能有效地减摇,当偏离这些波浪频率时,不但不能起减摇作用,有时还可能引起增摇现象。
因此,1934年德国的西门子公司在佛拉姆水舱设计的基础上,设计出一种主动式U 型水舱[1]。
该水舱通过鼓风机驱动舱内水的流动产生与扰动力矩具有180 相位差的稳定力矩。
主动式水舱可以使水舱能够在更宽的波浪频率范围内具有减摇效果,但是水舱内大量流体的“快速改变”问题,在技术实现上存在一定的困难,需要消耗的能量很大,在经济上很不合算。
船舶耐波性试验

船舶耐波性试验
船模试验
实船试验
1 。静水中摇荡试验
2。规则波中的运动试验:运动频响Y(w )
横摇(横浪) 纵摇、升沉(迎浪) 六自由度运动
2 。动力校准 确定其对纵轴或横轴的质量惯性矩
船模尺度选择
五、池壁效应 船模运动的兴波向池壁扩散并将反射回来
干扰船模边缘的波浪,影响到原来波峰与波谷 的位置,从而使船模运动发生改变。
六、船 模尺度选择 尺度的选择要慎重考虑,应根据 池壁效应 、
造波机的波长范围 、池长、车速等因素来确定。 通常船模长度在 2 到4 米。
尺度比 2 。运动相似 (对应点速度值同一比例)
3 。动力相似 (对应点的力的比值相同)
船模试验的相似条件
二、动力相似分析
次要作用
动力相似
主要作用
粘性力相似 雷诺数 相等
重力相似
惯性力相似
傅汝德数 相等 斯图罗哈数 相等
船模试验的相似条件
三、船模与实船各相同量之间的对应关系
船模试验的相似条件
四、质量分布相似 (静力校准和动力校准) 1 。静力校准 确定重量和重心位置
1 。船模在波浪中阻力的测量方法 试验结果表达为曲线
阻力增量
船模宽
波幅 船模长
阻力增量与波高的平方成比例
船模在波浪中的运动和增阻试验
2 。波浪中实船阻力增量的平均值预估
由于:
船模在波浪中的运动和增阻试验
2 。波浪中实船阻力增量的平均值预估 不规则波中阻力增量平方根的谱密度为:
船舶耐波性基本知识

• ④假定船舶摇荡的幅值是微小的,除了大角
度的横摇之外,船舶在波浪中的受力和运动 都可以作为线性问题处理,因而可以应用叠 加原理。
精选课件
41
• 3、运动方程式
精选课件
42
§3-2 船舶主尺度对耐波性的影响
• 1、船长
• 船长主要影响纵摇和垂荡。 • 增加船长对纵摇和垂荡都是有利的。船长较
精选课件
12
六、耐波性与船舶摇荡
• 船舶耐波性和船舶摇荡显然不是一回事。
• 但是船舶摇荡是耐波性的主要内容,耐波性
所涉及的其他内容主要是由船舶摇荡引起的, 因此估计船舶摇荡是评定耐波性最基本的条 件。
• 根据船舶摇荡可以定量地计算出保抨击、上
浪、飞车等性能。一般来说,船舶摇荡较缓 和,则耐波性也较优良。
• 笼罩在海洋上的空气流动的结果,使海面所
受的压力发生变化。同时由于水面与空气的 相对运动,在他们之间有摩擦力存在,使水 表面承受切应力。
• 正是由于大气压力的变化与切应力的存在,
使平静的水面发生局部变形。重力使变形的 水面有向原来平衡位置运动的趋势,惯性力 又有使变形继续下去的趋势,从而水面不断 地起伏、形成风浪。
免地要发生较大的纵摇和垂荡。如果平均吃 水减小,纵摇和垂荡的固有周期下降,即使 谐摇,也是在较小的波浪中发生,纵摇和垂 荡也不会太大。
精选课件
45
• 从船舶砰击的角度来看,要求吃水大些,
因为船舶砰击常发生在空载和压载航行状 态,尤其对具有尾倾而吃水较小的船更是 如此。吃水深,能够减少砰击的频率和砰 击的强度。
精选课件
17
第二章 海浪与统计分析
§2-1 海浪概述
• 海浪主要指表层海水受外力影响而发生的起
【CN110015387A】一种适用于低速船舶的减摇装置【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910348785.4(22)申请日 2019.04.28(71)申请人 哈尔滨工程大学地址 150001 黑龙江省哈尔滨市南岗区南通大街145号哈尔滨工程大学科技处知识产权办公室(72)发明人 林健峰 赵大刚 郭春雨 韩阳 张佐天 苏玉民 钟若凡 王于 (51)Int.Cl.B63B 39/06(2006.01)(54)发明名称一种适用于低速船舶的减摇装置(57)摘要本发明公开一种适用于低速船舶的减摇装置,包括两个转柱、两个可旋转支撑架、驱动装置以及控制系统,两个转柱分别通过可旋转支撑架对称安装在船体的舭部或底部的两侧,转柱通过内部固定的连接杆与传动机构一相连,传动机构一由船舱内的电机一驱动旋转,可旋转支撑架通过传动机构二与船舱内的电机二相连;两个电机固定在船舱内的平台上与控制系统相连,转柱为锥体。
本发明装置与现有减摇鳍相比构造简单,便于安装,能够减小船舶的横摇,使船舶具有良好的耐波性。
适用于低速船舶和需要在海上系泊作业的海洋结构物,如科考船、钓鱼船、货船等。
权利要求书1页 说明书3页 附图3页CN 110015387 A 2019.07.16C N 110015387A权 利 要 求 书1/1页CN 110015387 A1.一种适用于低速船舶的减摇装置,其特征在于:包括两个转柱、两个可旋转支撑架、驱动装置以及控制系统,两个转柱分别通过可旋转支撑架对称安装在船体的舭部或底部的两侧,转柱通过内部固定的连接杆与传动机构一相连,传动机构一由船舱内的电机一驱动旋转,可旋转支撑架通过传动机构二与船舱内的电机二相连;两个电机固定在船舱内的平台上与控制系统相连,转柱为锥体。
2.根据权利要求1所述的一种适用于低速船舶的减摇装置,其特征在于:转柱外表面沿周向等间距开设凹槽。
3.根据权利要求1所述的一种适用于低速船舶的减摇装置,其特征在于:转柱尾部为中空结构。
渔船横摇减摇装置——舭龙骨

渔船横摇减摇装置——舭龙骨
段祥云;段学民
【期刊名称】《河北渔业》
【年(卷),期】1998(000)003
【摘要】渔船在风浪中过大的横摇,会给船舶的使用性能造成一系列有害的影响。
舭龙骨即是减小横摇的重要装置。
某些沿海小船厂不重视舭龙骨的相关问题,致使船在航行时摇摆性能差,甚至引发事故,因此合理地选择舭龙骨尺寸及安装位置非常重要。
【总页数】3页(P26-28)
【作者】段祥云;段学民
【作者单位】不详;不详
【正文语种】中文
【中图分类】U664.71
【相关文献】
1.舭龙骨设计对船舶粘性横摇阻尼的影响 [J], 杨朕;张利军;陈鸽;曹凯
2.舭龙骨在渔船减摇中的作用 [J], 施周
3.带舭龙骨船体的横摇自由衰减的数值研究 [J], JIANG Yichen;ZHAO Xiaojie;ZONG Zhi
4.三维船体横摇运动数值模拟及舭龙骨阻尼特性研究 [J], 蒋银;朱仁传;缪国平;范菊
5.舭龙骨对半潜船横摇响应的影响 [J], 蔡连财;刘旭;霍浩杰;陈晓明
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 减摇水舱
是装在船体内的一种特制水舱,当船横摇时,水舱内的水能从一舷流向另一舷,从而 产生抵抗横摇的稳定力矩。自从1911年佛拉姆成功推出被动U型水舱以来,这种减摇装 置已经有 100 多年的发展历史,目前已经 有各种减摇水舱应用到几千艘各类船舶。减 摇水舱大的优点是其减摇效果跟航速没有直接关系,可以在任何航速下减摇。对被动 水舱而言,还具有功率小,成本低等优点。减摇水舱存在减摇效率相对较低、占用空 间大、低频扰动下易增摇等缺点,一 定程度上限制了其发展。
减摇鳍是通过船体中部两舭伸出展弦比为1-2的机翼型翼片。当船在风浪中横摇时,在 自动控制系统的控制下,根据横摇情况,不断改变鳍角,使鳍上产生的胜利在左右两 舷方向始终相反,达到减小横摇的目的。减摇鳍可以分为收放在船体内的收放式和固 定在舷外的非收放式,也可以分为分为开襟式(或称带襟翼的)鳍和非开襟式(整体 式)鳍。
式减摇装置依靠本身的动力和控制系统使船舶产生稳定力矩,以减少横 摇。被动式减摇装置本身不具有动力,仅根据使船舶横摇的风浪扰动力
矩大小而起作用。
2017/10/16
4
1 舭龙骨
是一种装于船中两舷舭部外侧,与舭部外板垂直 的长条形板材结构。在船横摇时扰动 船体周围的流场,使船产生附加阻尼,通过增加横摇阻尼来达到减摇的目的。它在任 何情况下都有效,减摇效果,效果大约为 20%~25%。舭龙骨结构简单、造价低、效能 高、没有 运动部件、便于维护,被广泛的应用到各类船舶。目前几乎所有海船都毫无 例外地装有舭龙骨,它已成为 海船船体的一部分。所以,在一般情况下所谓减摇装 置 系指舭龙骨以外的减摇措施和设备 。
在船舶舭部安装舭龙骨主要作用是在横摇时扰动船体周围流场,使船产生附加阻尼。 舭龙骨的附加阻尼有两部分:舭龙骨面积和水的相对速度形成的压力差阻尼以及船体 形状改变产生的表面阻尼。舭龙骨的设计主要根据母型船或船模试验来确定的。
位置:舭龙骨应设置在舭部距离横摇中心最远的部位,以产生尽可能大的稳定力矩, 舭龙骨不应超过中站面的方框线之外。舭龙骨的长度方向的位置应与满载时舭部流 线相一致。 尺度:舭龙骨在一舷的面积一般取L*d的2-4%,长度一般在船长的1/4-3/4之间。实 践表明,舭龙骨的附加阻尼随着其宽度的增加而增加,但是对于长度有一个有效范 围。舭龙骨宽度一般取0.2-1.2m。 结构:对于舭龙骨的最大宽度小于600mm的中小型船舶,可采用单板舭龙骨式样, 大船可采用双层板空心舭龙骨。无论单板舭龙骨或双层板空行舭龙骨,其腹板于船 体舭板的连接必须采用扁钢过渡。
减摇水舱发展趋势
减摇水舱控制技术提高 。运用先进的非线性控制算法,提出了 各种不同的水舱控制 策略,弥补减摇水舱的响应速度较慢的不足,提高了减摇水舱不同浪向和海况下的适 应能力及减摇效果。 减摇水舱功能拓展。其中引人注目的一项功能拓展减摇水舱可通过额外并不复杂的改 造而具有抗横倾功能,甚至主动生摇。这种功能码对需要在码头装载抗倾、以及需要 破冰作业的船舶,实用性非常高。德国 Intering 公司新开发的多功能新型减摇水舱已 经兼有减摇和抗倾功能。随着研究的深入,通过技术融合,减摇水舱终可以形成一个 船舶姿态综合测量与控制系统。 控制水舱周期、相位的调节。采用气阀控制,通过气阀的开关动作来调节每个周期内 舱内水的振荡相位。采用水阀调节水舱的自摇周期,采用气阀调节舱内水的振荡相位, 在一定程度上提高了减摇效果。 舱鳍联合减摇。由于减摇鳍在低航速时减摇效果较差, 而减摇水 舱虽然减摇效果没有减摇鳍高,但减摇水舱的 减摇效 果跟航速大小没关系,如果能够将二者组合起来, 按 一定规则协调一起工作,则二者能够优劣互补,在全 航速范围内实现完美的减摇效果。
被动式减摇水舱是使设计的水舱内振荡的固有频率等于船横摇的固有频率,这样在 共振的情况下,水舱是随船一起运动,而水舱里的水的运动滞后横摇角 90度。同时, 当船横摇的固有频率等于波浪的扰动力距频率时,也发生共振,这时船的横摇角滞 后波浪力距90度。这样水舱力的水的运动就滞后波浪扰动力矩180度。也就是说水 舱里的水的重量引起的稳定力矩方向恰好和波浪扰动力矩方向相反,从而使共振区 横摇减小。这就是所谓的“双共振减摇原理”。最常用的是U型水舱和槽型水舱。 可控被动减摇水舱是为了改善被动水舱的减摇性能,在水舱通道上安装节流阀,通 过横摇传感装置调节阀门开启和关闭的程度,控制水的流量,使这种减摇水舱比被 动水舱能在较宽的频率范围内有效工作。 主动式减摇水舱是依靠角速度陀螺感应船的横摇角速度信号,控制阀伺服机构,控 制阀张开的大小由泵将水从一舷打到另一舷的水量建立稳定力矩。 总之,减摇水舱对改善低速船、海上作业的浮动平台等特种船舶最好的主动式减摇装置,设计得好的减摇鳍在任何情况下可以使横摇幅值 保持在3°以内,在减小横摇的同时,在航速方面也可以得到好处。世界上第一套减摇 鳍装置于1923 年由日本三菱重工的元良信太郎博士设计。减摇鳍结构复杂,成本较高, 需要动力和控制系统,在低速情况下减摇效果很差,零航速时没有减摇效果。目前多 用于客船和军舰上。
2017/10/16
1
【 知识回顾 】
一、表观重力、有效波倾、横摇角 二、横摇受力(复原力、阻尼力、惯性力、波浪扰动力) 三、横摇谐摇状态及临界状态 四、横摇固有周期及阻尼系数估算方法
2017/10/16
2
船舶减摇技术现状及发展趋势 主要内容
船舶横摇减摇装置概述 船舶减摇技术发展现状 现有减摇装置的发展趋势 未来的新型减摇装置
2017/10/16
3
一、概述
船舶在风浪中过大的横摇,会给船舶航行的使用性能造成一系列的有害 影响,因此应设计性能优良的船舶。近百余年来,人们一直致力于研究 减缓船舶摇摆的措施。,保留下来的船舶减摇装置主要有舭龙骨、减摇
水舱、减摇鳍、减摇陀螺、 舵减摇、减摇重块等少数几种。 减摇装置按其本身是否具有动力可以分为主动式和被动式两大类。主动