相位测量仪设计
低频数字式相位测量仪

低频数字式相位测量仪(C题)一、任务设计并制作一个低频相位测量系统,包括相位测量仪、数字式移相信号发生器和移相网络三部份,示用意如下:二、要求1、大体要求(1)设计并制作一个相位测量仪(参见图1)a.频率范围:20Hz~20kHz。
b.相位测量仪的输入阻抗≥100k。
c.许诺两路输入正弦信号峰-峰值可别离在1V~5V范围内转变。
d.相位测量绝对误差≤2°。
e.具有频率测量及数字显示功能。
f.相位差数字显示:相位读数为0o~,分辨力为°。
(2)参考图2制作一个移相网络a.输入信号频率:100Hz、1kHz、10kHz。
b.持续相移范围:-45°~+45°。
c.A'、B'输出的正弦信号峰-峰值可别离在~5V范围内转变。
2.发挥部份(1)设计并制作一个数字式移相信号发生器(图3),用以产生相位测量仪所需的输入正弦信号,要求:a.频率范围:20Hz~20kHz,频率步进为20Hz,输出频率可预置。
b.A、B输出的正弦信号峰-峰值可别离在~5V范围内转变。
c.相位差范围为0~359°,相位差步进为1°,相位差值可预置。
d.数字显示预置的频率、相位差值。
(2)在维持相位测量仪测量误差和频率范围不变的条件下,扩展相位测量仪输入正弦电压峰-峰值至~5V范围。
(3)用数字移相信号发生器校验相位测量仪,自选几个频点、相位差值和不同幅度进行校验。
(4)其它。
三、评分标准四、说明1、移相网络的器件和元件参数自行选择,也能够自行设计不同于图2的移相网络。
2、大体要求(2)项中,当输入信号频率不同时,许诺切换移相网络中的元件。
3、相位测量仪和数字移相信号发生器相互独立,不许诺共用操纵与显示电路。
相位测量仪报告

相位测量仪摘要:本设计以单片机和可编程逻辑器件FPGA为控制核心,实现数字信号的产生、逻辑信号的采集和示波器的显示。
系统主要由三个模块组成:信号发生,数据采集与波形显示。
本设计经过单片机产生逻辑信号,利用FPGA作为数据处理器和DAC控制器,能准确、清晰的在模拟示波器上显示出逻辑波形、触发标记、光标。
利用键盘输入和液晶显示,能实现逻辑预设和触发模式设置。
经验证,本方案完成了全部基本功能和扩展功能。
关键词:逻辑分析仪可编程逻辑器件单片机Abstract:The design of the microcontroller and FPGA programmable logic devices for the control of the core, digital signal generation, logic signal acquisition and oscilloscope display. System consists of three modules: signal, data acquisition and waveform display. After the microcontroller generates the logic signal design , as a data processor using FPGA and DAC controllers , accurate, clearly shows the logic waveforms. The use of keyboard and LCD display , and to achieve pre-trigger mode logic. Proven, the program completed all the basic features and extensions. Keywords:logical link control Programmable logic devices MCU一、方案设计与论证1、数字式移相信号发生器方案一:采用FPGA实现DDS直接频率合成技术。
相位式激光测距仪激光接收部分设计

相位式激光测距仪激光接收部分设计激光测距仪是一种测量目标物体距离的工具,其原理是利用激光束在空气中传播的特性,通过测量激光束的往返时间来计算出目标物体与测距仪的距离。
激光接收部分是激光测距仪的核心组成部分之一,其设计的好坏直接影响到测量结果的准确性和稳定性。
在设计激光接收部分时,需要考虑以下几个关键因素:1.激光接收器的选择:激光接收器是接收激光信号的关键部件,其性能直接影响到激光测距仪的灵敏度和测距范围。
常见的激光接收器有光电二极管(PD)和光电效应晶体管(APD)。
PD具有较高的响应速度和较低的噪声,适用于近距离测距场景;APD具有较高的增益和较低的噪声,适用于远距离测距场景。
2.光学系统的设计:光学系统包括透镜、滤波器等光学元件,其作用是将入射的激光束聚焦到激光接收器上。
在设计光学系统时需要考虑激光束的聚焦效果、散斑噪声等因素,以提高测距仪的测量精度和信噪比。
3.信号放大和滤波电路的设计:激光接收器输出的信号很弱,需要经过放大和滤波才能得到可信的测距信号。
放大电路可以采用运算放大器等电路实现,滤波电路可以采用RC滤波器或数字滤波器等实现。
通过合理设计放大和滤波电路,可以提高信号的噪声抑制和动态范围。
4.时间测量电路的设计:激光测距仪是通过测量激光束的往返时间来计算距离的,因此需要设计一个高精度的时间测量电路。
常用的时间测量电路有计数器、时钟等,可以通过采样和比较测量激光脉冲信号的上升沿和下降沿来计算出往返时间。
在设计激光接收部分时,还需考虑以下一些技术细节:5.温度补偿:激光测距仪的测量精度受到温度的影响,尤其是光学元件和电子元件的温度变化。
因此,需要设计温度补偿电路,通过测量环境温度并补偿光学和电子元件的参考值,提高测量精度。
6.光路对齐:激光测距仪的激光发射和接收部分需要在一条直线上对准,才能确保测量结果的准确性。
因此,需要设计一个精密的光路对齐机构,确保激光束的传输方向稳定。
7.防干扰设计:激光测距仪易受到外界光源干扰,导致测量结果偏差。
单片机频率相位测量仪的设计
发器清 零 ,否则 得 到 的 异 或 值 不 同 ,如 图 3所 示 ,a,b 经
页 )所示 .
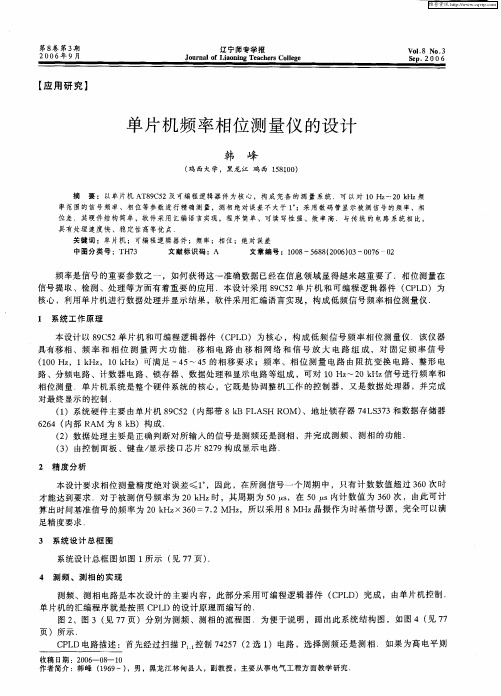
CL P D电路描述 :首 先经 过 扫描 P ¨控 制 72 7 ( 45 2选 1 电路 ,选择 测 频还 是 测相 .如果 为 高 电平则 )
收稿 日期 :2) 一 O— 1 【6 8 O ( ) 作 者 简介 :韩 峰 (9 9 ,男 ,黑 龙 江 林 甸 县 人 ,副 教授 , 主要 从 事 电气 工 程 方 面 教 学 研 究 1 6 一)
维普资讯
第 8 年 3 期 2 0 第 9月 卷 0 6
— —
辽 宁 师 专 学 报
o r lo a ni a hes Cole e J u na fLio ng Te c r lg
V 18 No 3 o . . S p e .200 6
1 系统工作 原理
本设计 以 8C 2单 片机 和可 编程 逻辑器 件 ( P D)为 核心 ,构 成 低 频 信号 频 率 相 位测 量仪 .该仪 器 95 CL
具有移 相 、频 率 和 相 位 测 量 两 大 功 能 .移 相 电 路 由移 相 网 络 和 信 号 放 大 电路 组 成 ,对 固定 频 率 信 号 ( 0 ,1k ,1 Hz 1 0Hz Hz 0 k )可满 足 一 5 5的 相移 要 求 ;频 率 、相 位 测 量 电路 由 阻抗 变换 电路 、整形 电 4 ~4
图1系统 设 计总图
图3测nI 流程
搭成 的 2 4位计 数器 ,经 锁存器
锁存 ,等 待 单 片 机 读 出 ;如果 为低 电平 则 测 相 .测 相 时先 调 用了 测 频 的 程 序 但 并 不 显 示 , 而是存 起 来待 用 ,然 后 给 D触
CPLD低频数字相位测量仪的设计

包括数字移相信 号发生 器和相位 测量仪 2 部分 , 分别 完成移相信号的发生 、 频率 与相位差 的预置、 数字显示、 号的移相 以 信
及移相后信 号相位差和频率 的测量 与相识 等功能。 中数字 式移 相信号发生 器可 以产 生预置频率 的差值 ; 其 相位 测量仪可
以测量和显 示相位信 号的频率 、 位 差。 相
厂一
后, 将波形整形电路的2 0 ] 厂 厂 厂 厂 ] ]
图 1 波形变换 示意 图
的功能, 用以产生相位测量仪所需的输入正弦信号 。 其
技术 要 求 指标 : 率 范 围2 Hz~ 0 Hz 频 率 步进 为 频 0 2k ,
2H , 0 z 输出频率可预置; 相位差范围为0 3 9 , ~ 5 。相位差
( 具有设定保存功能。 5)
实现相位 、 频率的测量, 并且具有独 自的控制功能和数
字显示 功能。
11系统硬件 结构 .
首 先 将 被 测 2列 正
弦 信号 A 、 B经平 滑 滤 波
后 , 入 过 零 比较 电路 , 输
A
1系统硬件设计
总体要求 : ( ) 有相 位 测量 功 能 , 1具 即相 位 测量 仪 的 功 能 。 其
传 感 及 检 测 仪 表
C L 低频 数 字 相 位 测 量 仪 的设 计 PD
朱 红梅 , 美 君 潘
( 海西部矿 业铅业 摘
要: 绍 了一种基 于复杂的可编程逻辑 器件( L 和 高速 单片机s c8 c 8 介 CP D) T 9 5 的低频数字 相位 测量仪 。 该测量仪
京航 天航 空 大 学 出版 社 【] 白英 彩 . 型 计 算 机 常 用 芯 片 手 册 【 . 海 : 海科 学 3 微 M】 上 上
应用8051单片机IP设计相位测量仪
r eso n rc es .
K y e W o d : r q e c P a e r s F e u n y h s Me u e n S s e l OP 80 I I Co e s a r me t y t m S C; 5 P r
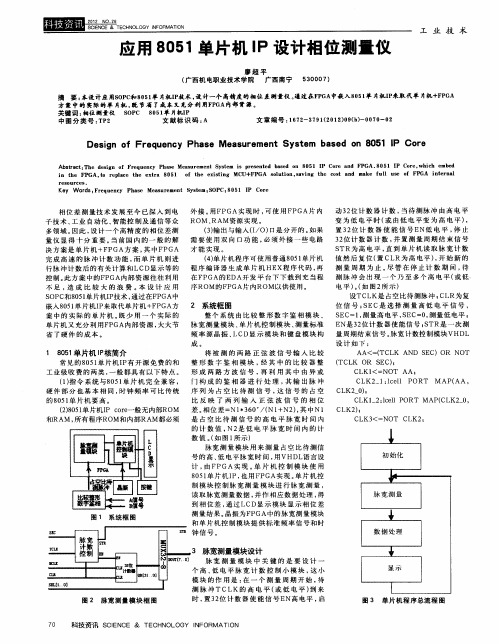
2 当待 测 脉 冲 由 高 电平 外接。 P 用F GA实 现 时 , 使 用 F GA片 内 动 3 位 计 数 器 计 数 , 可 P R0M 、 RAM资源 实现 。 变 为 低 电平 时 ( 由低 电 平 变 为 高 电平 ) 或 , 子技 术 、 业 自动 化 、 能 控 制 及 通 信 等 众 工 智 2 停 多 领域 。 因此 , 计一 个 高 精 度 的 相 位 差 测 设 ( ) 出 与输 入 (/ 口是 分 开 的 。 果 置 3 位 计 数 器 使 能 信 号 EN低 电 平 , 止 3输 I O) 如 2 并 必 量仪显得十 分重要。 当前 国 内 的 一 般 的 解 需 要 使 用 双 向 口功 能 , 须 外 接 一 些 电路 3 位 计 数 器 计 数 , 置 测 量 周期 结 束 信 号
S R为 高 电 平 , 到单 片机 读 取 脉 宽 计 数 T 直 值 然 后 复位 ( C R为 高 电平 ) 开 始 新 的 置 L ,
应用8051单片机IP设计相位测量仪

应用8051单片机IP设计相位测量仪摘要:本设计应用SOPC和8051单片机IP技术,设计一个高精度的相位差测量仪。
通过在FPGA中嵌入8051单片机IP来取代单片机+FPGA方案中的实际的单片机,既节省了成本又充分利用FPGA内部资源。
关键词:相位测量仪SOPC 8051单片机IPAbstract:The design of Frequency Phase Measurement System is presented based on 8051 IP Core and FPGA.8051 IP Core,which embed in the FPGA,to replace the extra 8051 of the existing MCU+FPGA solution,saving the cost and make full use of FPGA internal resources.Key Words:Frequency Phase Measurement System;SOPC;8051 IP Core相位差测量技术发展至今已深入到电子技术、工业自动化、智能控制及通信等众多领域。
因此,设计一个高精度的相位差测量仪显得十分重要。
当前国内的一般的解决方案是单片机+FPGA方案,其中FPGA完成高速的脉冲计数功能,而单片机则进行脉冲计数后的有关计算和LCD显示等的控制。
此方案中的FPGA内部资源往往利用不足,造成比较大的浪费。
本设计应用SOPC和8051单片机IP技术,通过在FPGA中嵌入8051单片机IP来取代单片机+FPGA方案中的实际的单片机。
既少用一个实际的单片机又充分利用FPGA内部资源,大大节省了硬件的成本。
1 8051单片机IP核简介常见的8051单片机IP有开源免费的和工业级收费的两类,一般都具有以下特点。
脉宽测量模块用来测量占空比待测信号的高、低电平脉宽时间,用VHDL语言设计,由FPGA实现。
毕业设计论文《低频数字式相位测量仪》

毕业设计论文《低频数字式相位测量仪》摘要该数字式相位测量仪以单片机 (89c52) 为核心 , 通过高速计数器 CD4040 为计数器计算脉冲个数从 , 而达到计算相位的要求 , 通过 8279 驱动数码管显示正弦波的频率,不采用一般的模拟的振动器产生 , 而是采用单片机产生 , 从而实现了产生到显示的数字化 . 具有产生的频率精确 , 稳定的特点 . 相移部分采用一般的 RC 移相电路 , 节省了成本。
一方案论证与比较 :1 常见正弦信号的测量方法 :方案一:采用模拟分离元件如二极管,三极管等非线性元件,实现频率的测量,检相的功能,使用起来方便,价格便宜,但采用分离元件由于分散性太大,不便于集成及数字化,而且测量误差大。
方案二:采用集成的检相器,检频器实现频率及相位的测量。
这种方法的实现框图如下:这种方法虽然可实现比较精确的测量,但由于模拟信号易受外界的干扰,不易调节,无法实现智能化,数字化的缺点,一般在要求较低的情况下使用。
方案三:此方案采用高速信号发生器产生 20MHz 的高频信号,其主要特点是采用 CD4040 高频计数器结合单片机,利用计数脉冲实现测量相位与频率的目标。
这种方法克服了模拟电路的缺点,实现了数字化与集成化。
本设计采用了这种方法。
这种方案的组成框图:二系统总体设计按照题目要求,我们设计的相位测量系统包括三部分:正弦波产生系统(包括频率调整电路),移相电路和相位显视系统,其总体框图如下:三各部分硬件电路设计及参数计算1、正弦波产生电路•方案一:利用 8038 芯片或 MAX038 可以实现压控的函数发生器通过改变少量的外围元件,可实现正弦波,方波,三角波,并可实现频率调节,但采用模拟器件由于元件分散性太大,即使使用单片函数发生器,参数也与外部元件有关,外接的电阻,电容对参数影响很大,因而产生的频率稳定度差,精度低,抗干扰能力差,调节困难,成本也高。
而且灵活性差,不能实现智能化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
获全国一等奖作品之一(华中科技大学)作者:缪学进刘云王学虎赛前辅导:王少荣文稿整理辅导:涂仁发摘要:本作品由相位测量仪、数字移相信号发生器和移相网络3个模块构成,分别由两块单片机独立地实现控制与显示功能。
采用DDS技术生成两路正弦波信号,并通过改变存储器中数据读取的起始地址来实现数字移相的功能,用φ—T变换技术来实现相位差的测量,使得显示分辨率精确到0.01°,测得的频率与相位差值送LCD进行显示,加入红外键盘以及语音播报的功能,使得系统具有智能化,人性化的特色。
一、方案论证与设计1.相位测量方案方案一:将被测的两路正弦波信号经比较器整形成方波信号,利用异或门电路进行鉴相处理;将得到的脉冲序列经过RC平滑滤波取出其直流分量,该直流电平的幅值与两路信号的相位差成正比;将此信号送入A/D转换器由单片机进行运算处理,从而计算出相位差值。
方案二:采用脉冲填充计数法,将正弦波信号整形成方波信号,其前、后沿分别对应于正弦波的正相过零点与负相过零点,对两路方波信号进行异或操作之后,输出脉冲序列的脉宽,脉宽可以反映两列信号的相位差,以输入信号所整形成的方波信号作为基频,经锁相环倍频得到的高频脉冲作为闸门电路的计数脉冲,由单片机对获取的计数值进行处理得到两路信号的相位差。
方案三:鉴相部分同方案二,将两路方波信号异或后与晶振的基准频率进行与操作,得到一系列的高频窄脉冲序列;通过两片计数器同时对该脉冲序列以及基准源脉冲序列进行计数,一路方波信号送入单片机外部中断口,作为控制信号控制两片计数器,得到的两路计数值送入单片机进行处理得相位差值。
对以上3种方案进行比较,方案一在低频段时,RC滤波电路的输出波动很大,难以达到要求的相位精度,而方案二在所测频率较高时,受锁相环工作频率等参数的影响/相位差测量的误差会比较大。
采用方案三由高精度的晶振产生稳定的基准频率,可以满足系统高精度、高稳定度的要求,2.频率测量方案方案一:用专用频率计模块,如ICM7216芯片来测量频率,其内部带放大整形电路,可以直接输入正弦信号;用一块高精度晶振和两个低温度系数电容构成10MHz振荡电路,其转换开关具有0.01、0.l、l、10s四种闸门时间,量程可以自动切换,待计数过程结束时显示测频结果。
方案二:利用可编程计数器来实现频率的测量,将被测信号转换为方波信号,再输入可编程计数器8254的某一路CLK端口,并将Gate端置为高电平,利用单片机产生的定时中断来控制8254的计数,最后计数值送入单片机处理并输出。
对以上方案进行比较,利用频率计模块来实现频率测量的方案中,ICM7216的外围硬件电路复杂,测频精度不够高;而方案二用单片机控制计数器工作,硬件简单,且频率测量精度高,这也是目前较为成熟的一种高精度测频方案。
因此,采用方案二来实现频率的测量。
3.数字移相信号发生器方案在数字移相信号发生器模块电路中,首先要生成相位测量仪所需要的两路不同相位的正弦波信号,目前DDS已经是很完善的一种数字信号产生方案,所以在该部分,我们主要对产生正弦波信号的数字移相方案进行论证。
方案一:将正弦波量化为一张数据表,分别存储于两片E2PROM之中,通过单片机控制计数器来对存储器中的数据进行寻址,并经过两片D/A转换芯片循环输出该数据表,当两路D/A转换芯片所获得的数据序列不同时,转换所得的两路正弦信号存在相位差,相位差值仪仅与数据地址的偏移量有关。
方案二:将参考正弦波转换为方波,以此信号为基准,延时后产生另一路同频率的方波,通过改变延时的长短来控制两个波形的相位差,最后通过波形变换电路将其还原为两路有相位差的正弦波输出。
综合以上两种方案,方案一采用2 KB的存储芯片2817存储量化的正弦波数据,通过单片机可以较精确地控制移相的大小,实现1°相位差步进,而且硬件电路较为简单;而方案二虽然也可以精确控制移相,但是,相对而言,硬件电路更为复杂,调试较为麻烦,因此,我们采用第一种方案来实现数字移相。
二、原理分析与硬件电路图根据赛题要求,该低频相位测量系统包括相位测量仪、数字式移相信号发生器和移相网络3个模块,由于3个模块相对独立,其中相位测量模块是重点。
以下分别对其进行原理分析电路设计。
1.相位差测量模块(1)原理分析输入两路同频率的正弦波信号,其波形表达式分别为当两路信号的频率相同时,相角差θ=φ1-φ2是一个与时间无关的常数。
如图2_ C1扩示,将此两路正弦波信号经过放大整形成两路占空比为50%的正方波信号f1、f2,经过异或门输出一个脉冲序列A,与晶振产生的基准脉冲波B进行与操作,得到调制后的波形C,在一定的时间范围内对B、C中脉冲的个数进行计数,分别得Nc、Nb,则其相位差计算公式为θ=Nc/Nb x 360°/2,采用多个周期计数取平均值的方式以提高测相精度,系统框图如图2-Cl-2所示。
(2)原理电路①前级放大整形电路。
两列正弦波信号经过一级电压跟随器以提高测量仪的输入阻抗,选用高精度、低漂移型运放TLE2074,使输入阻抗达到兆欧数量级,由LM311构成的迟滞比较器可以有效地避免在过零点时信号的干扰和抖动所引起的电压跳变,最后通过一级单门限电压比较器输出两路TTL电平信号,经异或门得到方波的脉冲序列。
该前级放大整形电路的基本原理如图2-Cl-3所示。
②相位差测量电路。
通过理论分析可知,基准频率越高,窄脉冲个数越多,相位差的测量也越精确,但受到8254极限工作频率的影响,最终选取8.000MHz的晶振,由单片机I /O口控制两片8254分别对两路脉冲进行计数,将8254内含的两路计数器进行级联以提高计数位数,对32位的计数结果进行浮点运算得相位差,其原理图如图2-Cl-4所示。
③相位极性判别电路。
图2-Cl-4所示的为相位测量电路,它只能给出相位差的大小,无法判断波形的超前或者滞后,因此,将波形整形电路的两路输出方波送入D触发器中进行相位极性判别,当V o超前vI,时,Q端输出高电平,反之输出低电平,极性判别的原理图如图2-C1-5所示。
2.数字式移相信号发生器模块(1)原理分析要实现数字移相,首先要生成两路正弦波信号,在目前的波形生成方案中,最常用的就是数字式直接频率合成技术( DDS),DDS的工作原理是:基于相位与幅度的对应关系,通过改变频率控制字来改变相位累加器的相位累加速度,然后在固定时钟的控制下取样,取样得到的相位值通过相幅转换得到的相位值所对应的幅度序列,通过D/A转换以及低通滤波之后输出正弦波信号。
基本框图如图2-C1-6所示。
相幅转换的方式选用查表法,将正弦波的量化数据存储于两片E2PROM之k中,通过控制读取存储器数据的地址差,改变输出波形的相位差,每个周期取样360个点,相位差步进为1°。
锁相环倍频的基频为900Hz,输出正弦信号的频率范围为5MHz-23kHz,实际频率步进值为2.5Hz。
原理框图如图2-Cl-7所示。
(2)原理电路如图2-C1-8所示,选用2KB的E2PROM存储器2817对正弦波信号的量化数据进行存储,由晶振电路产生基准频率的方波作为锁相环的基准时钟,配合可编程计数器8254进行倍频处理,倍频之后的信号控制计数器74HC4040进行循环计数,将计数器的输出作为存储器读取的地址,改变数据读取的地址即可改变输出波形的相位。
通过改变AD7524的基准电压V REF幅值来改变输出波形的峰-峰值大小。
因两路正弦波产生的原理相同,仅仅是数据读取的起始地址不同,图2-C1-9所示的是一路波形生成电路,另一路硬件电路与此相同。
三、软件设计与流程1.系统软件介绍软件部分采用模块化程序设计的方法编制,系统软件由主控制程序、液晶显示部分子程序,键盘服务子程序、语音提示部分子程序组成。
选用凌阳公司SPCE061A型16位单片机微控制器,其指令系统中提出了具有较高运算速度的16x16位乘法运算指令和内积运算指令,为其应用增添了DSP功能,可以进行数字信号处理,因此,系统可很便利地加入了语音模块。
在其编译环境下可以内嵌C语言,C函数与汇编函数可以很方便的相互调用,所以编程效率高而且可靠。
2.程序流程图相位测试模块流程图如图2-Cl-10所示。
数字移相信号产生流程图如图2-C1-11所示。
四、系统测试与误差分析1.测试环境时间2003年9月18日。
温度25°C。
2.测试仪器多功能数字万用表FLUKE17B工频电参数测试仪BS1905数字示波器TDS1002函数发生器/计数器CA164OP-20型3.测试方法硬件模块测试:数字移相信号发生器,通过红外键盘对输出两路信号的频率、相位差以及峰-峰值进行设置。
最后把产生的有相位差的两路信号分别接入相位测试电路进行相位差的测量。
软件模块测试:采用自下而上的调试方式,先进行模块测试程序的调试,待全部通过之后将所有的软件程序串接起来并结合硬件电路进行整体调试。
4.测试数据(l)相位差测量仪校准由于实验室只有50Hz工频相位测试仪,所以选取了50Hz频点进行测试,由此来对相位测量仪进行校准,数据如表2-Cl-1所示。
(2)相位差与幅度的校验根据题意要求,自选几个频点进行校验,如表2-C1-2~表2-Cl-5所示。
5.误差分析(l)相位测量电路的误差分析在相位测量过程中,受电子元器件性能的影响,在正弦波经过零检测电路整成方波的过程之中,两路信号不可能做到时延特性完全一致,前端放大电路以及过零检测电路会带来方波信号相对于输入信号的过零点偏移,所以得到的两个方波信号的相位差实际上是输入信号的相位差和两路过零比较电路相位差的综合相位差,由于是在一定的时间内对脉冲的个数进行计数,因此将引入截断误差,尤其当两路信号的相位差较小时,截断误差的存在将在很大程度上对相位测量的精度造成影响。
(2)数字式移相信号发生电路的误差分析在数字式移相信号发生电路中,由于锁相环的稳定度的影响,波形的微小振荡就会使得输出和设定值之间存在输出偏差,同时由于D/A转换过程中不可避免的存在量化误差,所以产生的波形幅值与频率将会与设定的预期值形成一定的误差。
由于通用板本身结构的限制,以及电路中两路信号的串扰等影响,都会使得系统存在一定的误差。
五、总结本系统实现了题目基本部分以及发挥部分的要求,相位测量仪的测量范围为:电压(峰-峰值);0. 2~30V,频率:2Hz~65kHz;显示分辨率为0.01°,测量的绝对误差在2°以内。
数字式移相信号发生器扩展到5Hz~23kHz,频率步进达到2.5Hz,相位差步进1°,幅值在0.1~5.5V范围内可调,人机交互接口采用双键盘(有线键盘+红外遥控键盘)、带语音提示的模式;由于单片机留有空闲的I/0 口,可以进一步对系统的功能进行扩展,比如,加入相位测量的自适应调节、加入波形的打印功能或者将语音播报的功能进一步完善等。