对四自由度并联机构分析
4-UPU并联机构奇异研究与工作空间分析

Abs t r a c t: Ba s e d o n S c r e w Th e o r y a n d Ku t z ba c h— Gr i f b l e r Fo r mu l a,t h e mo v e me n t c h a r a c t e r wa s a n a l y z e d a n d DOF wa s c a c u l a t e d
J I Ye , W ANG S h e n g , YU B i n g h u i ,Z HU De r o n g
( 1 . L u o y a n g I n s t i t u t e o f S c i e n c e a n d T e c h n o l o g y ,L u o y a n g He n a n 4 7 1 0 2 3 ,C h i n a ;
4 - U P U并 联机 构 奇异 研 究 与工作 空 间 分析
季晔 ,王胜 ,余炳辉 ,朱德 荣
( 1 .洛 阳理 工 学院 ,河南洛 阳 4 7 1 0 2 3 ;2 .陕西 工商职 业 学院 ,陕西西安 7 1 0 1 1 9 )
摘要 :基于螺旋理论 ,分析 了一种 4 一 U P U并 联机 构的运动 性质 ,利用 K u t z b a e h - G r t i b l e r 公 式计算 了机构 的 自由度 。根 据机构运动副的布置方 式 ,选取 4个移动副作为输入 。建立机构的位置关 系方 程 ,采用雅克 比代 数法判断奇 异性 ;根据约
一种新型四自由度混联机器人的设计与分析
一种新型四自由度混联机器人的设计与分析
李伟;王权;何兵;管健
【期刊名称】《机械设计与制造》
【年(卷),期】2015(000)005
【摘要】通过对机器人串并联结构的分析,设计了一种新型的四自由度混联机器人,克服了同类机器人腕部俯仰电机不容易被安放在机架上的困难.将控制电机都设计在机架上,大小臂电机不同轴,腕部俯仰电机与大臂电机同轴,通过一种双平行四边形机构实现腕部俯仰动作,结构简单、俯仰角容易控制,俯仰运动不受大小臂运动的影响而发生牵连运动.腕部俯仰驱动的传动件为连杆,与大小臂以并联的形式进行连接,对机器人模型进行静力学分析,分析结果表明这种腕部俯仰机构能够提高机械臂的抗弯刚度.
【总页数】4页(P168-170,174)
【作者】李伟;王权;何兵;管健
【作者单位】郑州轻工业学院机电工程学院,河南郑州450002;郑州轻工业学院机电工程学院,河南郑州450002;郑州轻工业学院机电工程学院,河南郑州450002;郑州轻工业学院机电工程学院,河南郑州450002
【正文语种】中文
【中图分类】TH16;TP24
【相关文献】
1.一种新型伪四自由度并联机器人的设计与分析 [J], 樊启高;孙璧文;于振中;武亚恒
2.一种新型的五自由度混联抛光机器人的分析 [J], 李提伟;赵一杰;曹凯
3.考虑工作空间与力传递效率的新型五自由度混联机器人设计与分析 [J], 许允斗; 徐郑和; 杨帆; 赵云; 梅有恩; 周玉林; 姚建涛; 赵永生
4.一种新型非对称五自由度混联机器人的尺度综合 [J], 董成林;刘海涛;杨俊豪
5.空间四自由度串并混联下肢康复机器人设计与分析 [J], 史小华;任岭雪;廖梓宇;朱家增;王洪波
因版权原因,仅展示原文概要,查看原文内容请购买。
并联机器人的运动学分析
并联机器人的运动学分析一、引言机器人技术作为现代工业生产的重要组成部分,已经在汽车制造、电子设备组装、医疗器械等领域发挥着重要作用。
而在机器人技术中,并联机器人以其独特的结构和运动方式备受关注。
本文将对并联机器人的运动学进行深入分析,探讨其工作原理及应用前景。
二、并联机器人的运动学模型并联机器人由多个执行机构组成,这些执行机构通过联接杆件与运动基座相连,使机器人具有多自由度运动能力。
为了对并联机器人的运动学进行建模,我们需要确定每个执行机构的运动关系。
其中,分析最为常用的是基于四杆机构的并联机器人。
1. 四杆机构的运动学模型四杆机构是一种由两个连杆和两个摇杆组成的机构,通过这些部件的相对运动实现机构的运动。
在并联机器人中,常见的四杆机构包括平行型、等长型等。
以平行型四杆机构为例,我们可以将其简化为平面结构,并通过设定适当的坐标系进行建模。
在平行型四杆机构中,设两个连杆为L1和L2,两个摇杆为L3和L4。
定义坐标系,以机构的连杆转轴为原点,建立运动坐标系OXYZ。
假设L3的转角为θ3,L4的转角为θ4,连杆L1和L2的长度分别为L1和L2,则可以通过几何关系得到机构的运动学方程。
2. 并联机器人的运动学模型并联机器人由多个四杆机构组成,各个四杆机构之间通过杆件连接,使得整个机器人能够实现更复杂的运动。
以三自由度的并联机器人为例,每个四杆机构的连杆长度、摇杆转角都有一定的自由度限制。
通过对每个四杆机构的运动学模型进行分析,可以得到整个并联机器人的运动学方程。
三、并联机器人的动力学分析除了运动学分析,动力学分析也是对并联机器人进行研究的重要方向。
动力学分析包括对并联机器人在运动过程中的力矩、加速度等动力学参数的研究,是实现机器人精确控制和安全运行的基础。
1. 动力学模型的建立在并联机器人的动力学分析中,我们通常采用拉格朗日方法建立动力学数学模型。
通过拉格朗日方程可以建立机器人运动学和动力学之间的联系,从而实现对机器人运动过程中各个关节力矩的估算。
一种新型四自由度并联机器人
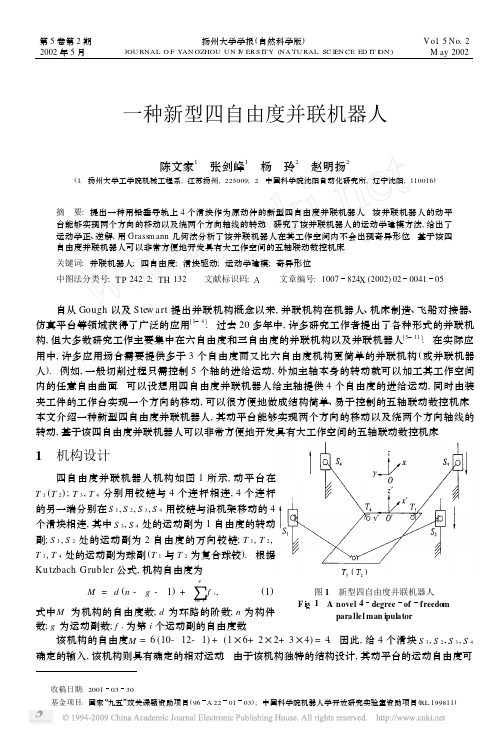
一种新型四自由度并联机器人陈文家1 张剑峰1 杨 玲2 赵明扬2(1.扬州大学工学院机械工程系,江苏扬州,225009;2.中国科学院沈阳自动化研究所,辽宁沈阳,110016)摘 要:提出一种用铅垂导轨上4个滑块作为原动件的新型四自由度并联机器人.该并联机器人的动平台能够实现两个方向的移动以及绕两个方向轴线的转动.研究了该并联机器人的运动学建模方法,给出了运动学正、逆解,用Grass m ann 几何法分析了该并联机器人在其工作空间内不会出现奇异形位.基于该四自由度并联机器人可以非常方便地开发具有大工作空间的五轴联动数控机床.关键词:并联机器人;四自由度;滑块驱动;运动学建模;奇异形位中图法分类号:T P 242.2;TH 132 文献标识码:A 文章编号:1007824X (2002)02004105自从Gough 以及Stew art 提出并联机构概念以来,并联机构在机器人、机床制造、飞船对接器、仿真平台等领域获得了广泛的应用[1~4].过去20多年中,许多研究工作者提出了各种形式的并联机构,但大多数研究工作主要集中在六自由度和三自由度的并联机构以及并联机器人[5~11].在实际应用中,许多应用场合需要提供多于3个自由度而又比六自由度机构更简单的并联机构(或并联机器人).例如,一般切削过程只需控制5个轴的进给运动,外加主轴本身的转动就可以加工其工作空间内的任意自由曲面.可以设想用四自由度并联机器人给主轴提供4个自由度的进给运动,同时由装夹工件的工作台实现一个方向的移动,可以很方便地做成结构简单、易于控制的五轴联动数控机床.本文介绍一种新型四自由度并联机器人,其动平台能够实现两个方向的移动以及绕两个方向轴线的转动,基于该四自由度并联机器人可以非常方便地开发具有大工作空间的五轴联动数控机床.图1 新型四自由度并联机器人F ig .1 A novel 4degree of freedo m parallel man ipulator1 机构设计四自由度并联机器人机构如图1所示,动平台在T 1(T 2);T 3,T 4分别用铰链与4个连杆相连,4个连杆的另一端分别在S 1,S 2,S 3,S 4用铰链与沿机架移动的4个滑块相连,其中S 3,S 4处的运动副为1自由度的转动副;S 1,S 2处的运动副为2自由度的万向铰链;T 1,T 2,T 3,T 4处的运动副为球副(T 1与T 2为复合球铰).根据Ku tzbach Grub ler 公式,机构自由度为M =d (n -g -1)+∑gi =1fi ,(1)式中M 为机构的自由度数;d 为环路的阶数;n 为构件数;g 为运动副数;f i 为第i 个运动副的自由度数.该机构的自由度M =6(10-12-1)+(1×6+2×2+3×4)=4.因此,给4个滑块S 1,S 2,S 3,S 4确定的输入,该机构则具有确定的相对运动.由于该机构独特的结构设计,其动平台的运动自由度可收稿日期:20010330基金项目:国家“九五”攻关课题资助项目(96A 220103);中国科学院机器人学开放研究实验室资助项目(RL 199811)第5卷第2期扬州大学学报(自然科学版)V o l .5N o.22002年5月JOU RNAL O F YAN GZHOU UN I V ER S IT Y (NA TU RAL SC IEN CE ED IT I ON )M ay 2002以直观地加以判别:S3T3T4S4相当于构成一个Oy z平面内的单环路平面六杆机构,其中连线T3T4具有3个运动自由度,分别为沿y,z方向的移动以及绕x方向的转动,而动平台T1T2T3T4可以绕T3T4轴线转动,所以动平台的4个自由度为两个移动以及两个转动.2 运动学逆解逆运动学问题可描述为:给定动平台的位置和姿态,求能实现该位置、姿态的驱动关节位移[12].首先建立坐标系,仿照一般机器人,定义一个基础坐标系以及一个活动坐标系,参见图1.活动坐标系(O′x′y′z′)位于动平台上,原点O′位于T3,T4连线中点处,x′轴通过T1与T2的复合球铰中心,显然以动平台中心为原点的工具坐标系相对该动坐标系的描述是一移动量为常数的移动变换矩阵,下文对这一变换关系不再赘述;基础坐标系(O xy z)设在机座上,其方向与动平台处于水平位置时活动坐标系(O′x′y′z′)的方向相同,原点O位于动平台处于水平位置时活动坐标系(O′x′y′z′)的z′轴上.显然,动平台可以相对基础坐标系作y向或z向移动以及绕活动坐标系的x′方向的轴或y′方向的轴转动.以P和R分别表示动坐标系(O′x′y′z′)相对基础坐标系(O xy z)的位置和姿态,P为一个3×1矢量,R为一个3×3矩阵,由于该操作机的特殊结构,P及R可表示为P=[p x,p y,p z]T=[0,p y,p z]T,(2)R=R x′R y′,(3)式中R x′代表动平台绕x′轴旋转A角的旋转矩阵,Ry′为动平台绕y′轴旋转B角的旋转矩阵:R x′=1000c A-s As A c A, R y′=c B0s B010-s B0c B.因此R=R x′R y′=c B0s Bs A s B c A-s A c B -s B c A s A c A c B.设动平台上的4个铰链T1,T2,T3,T4在各自动坐标系中的坐标值用如下矢量表示:T′i=[x i,y i,z i]T (i=1~4),(4)则T i(i=1,2,3,4)在基础坐标系(O xy z)中的坐标可表示为T i=R T′i+P (i=1~4),(5)或写为t ixt iy t iz =Rx iy iz i+p yp z (i=1~4).设4个连杆的长度分别用L1,L2,L3,L4表示,则以下约束方程即为该操作机的运动学逆解方程:L2i=‖S i-T i‖2 (i=1~4),(6)或写成分量形式:L2i(S ix-t ix)2+(S iy-t iy)2+(S iz-t iz)2,其中S iz=H i.因此,各滑块位移可表示为24扬州大学学报(自然科学版)第5卷H 1=t 1z +L 21-(S 1x -t 1x )2-(S 1y -t 1y )2,H 2=t 2z +L 22-(S 2x -t 2x )2-(S 2y -t 2y )2,H 3=t 3z +L 23-(S 3x -t 3x )2-(S 3y -t 3y )2,H 4=t 4z +L 24-(S 4x -t 4x )2-(S 4y -t 4y )2.(7)3 运动学正解该四自由度并联平台机构的运动学正解问题可描述为:已知驱动分支的行程H i (i =1~4),求动平台的位置(0,p y ,p z )和姿态(A ,B ).将T i 的坐标代入式(6),得关于p y ,p z ,A ,B 4个未知数的方程组:f i (p y ,p z ,A ,B )=0 (i =1~4),(8)式中f 1=-L 21+S 21x +S 21y +H 21+x 21+y 21+z 21-2S 1y p y -2H 1p z +p 2y +p 2z -2S 1x x 1c B -2S 1x z 1s B -2S 1y y 1c A -2H 1y 1s A -2S 1y x 1s A s B +2S 1y z 1s A c B +2H 1x 1c A s B -2H 1z 1c A c B +2y 1p y c A +2p z y 1s A +2x 1p y s A s B -2p y z 1s A c B -2p z x 1c A s B +2p z z 1c A c B =0,f 2=-L 22+S 22x +S 22y +H 22+x 22+y 22+z 22-2S 2y p y -2H 2p z +p 2y +p 2z -2S 2x x 2c B -2S 2x z 2s B -2S 2y y 2c A -2H 2y 2s A -2S 2y x 2s A s B +2S 2y z 2s A c B +2H 2x 2c A s B -2H 2z 2c A c B +2y 2p y c A +2p z y 2s A +2x 2p y s A s B -2p y z 2s A c B -2p z x 2c A s B +2p z z 2c A c B =0,f 3=-L 23+S 23x +S 23y +H 23+x 23+y 23+z 23-2S 3y p y -2H 3p z +p 2y +p 2z -2S 3x x 3c B -2S 3x z 3s B -2S 3y y 3c A -2H 3y 3s A -2S 3y x 3s A s B +2S 3y z 3s A c B +2H 3x 3c A s B -2H 3z 3c A c B +2y 3p y c A +2p z y 3s A +2x 3p y s A s B -2p y z 3s A c B -2p z x 3c A s B +2p z z 3c A c B =0,f 4=-L 24+S 24x +S 24y +H 24+x 24+y 24+z 24-2S 4y p y -2H 4p z +p 2y +p 2z -2S 4x x 4c B -2S 4x z 4s B -2S 4y y 4c A -2H 4y 4s A -2S 4y x 4s A s B +2S 4y z 4s A c B +2H 4x 4c A s B -2H 4z 4c A c B +2y 4p y c A +2p z y 4s A +2x 4p y s A s B -2p y z 4s A c B -2p z x 4c A s B +2p z z 4c A c B =0.不失一般性,将z 1=z 2=z 3=z 4=0,y 1=y 2=0,x 3=x 4=0,s 3x =s 4x =0代入上式,得f 1=-L 21+S 21x +S 21y +H 21+x 21-2S 1y p y -2H 1p z +p 2y +p 2z -2S 1x x 1c B -2S 1y x 1s A s B +2H 1x 1c A s B +2x 1p y s A s B -2p z x 1c A s B =0,f 2=-L 22+S 22x +S 22y +H 22+x 22-2S 2y p y -2H 2p z +p 2y +p 2z -2S 2x x 2c B -2S 2y x 2s A s B +2H 2x 2c A s B +2x 2p y s A s B -2p z x 2c A s B =0,f 3=-L 23+S 23y +H 23+y 23-2S 3y p y -2H 3p z +p 2y +p 2z -2S 3y y 3c A -2H 3y 3s A +2y 3p y c A +2p z y 3s A =0,f 4=-L 24+S 24y +H 24+y 24-2S 4y p y -2H 4p z +p 2y +p 2z -2S 4y y 4c A -2H 4y 4s A +2y 4p y c A +2p z y 4s A =0.式(8)即为该操作机的运动学正解模型.分别以k ,l ,m ,n 代表s A ,c A ,s B ,c B 代入f i 中,考虑到k 2+l 2=1,(9)m 2+n 2=1.(10)则联立(8)(9)(10)式得到关于p y ,p z ,k ,l ,m ,n 6个未知数的高次非线性方程组,可用N ew tonR ap h son 方法求解[13].4 特殊形位分析当并联机器人机构处于某些特定的形位时,其Jacob ian 矩阵成为奇异阵,对应的行列式为0,这34第2期陈文家等:一种新型四自由度并联机器人时机构的速度反解不存在,这种机构的形位就称为奇异形位或特殊形位.当并联机器人处于特殊形位时,其操作平台具有多余的自由度,这时机构就失去了控制[14],因此在设计和应用并联机器人时应避开特殊形位.并联机器人的特殊形位可以通过分析机构的Jacob ian矩阵是否奇异进行判别,也可以用Grass m ann线几何法通过线丛和线汇的特性来判别.由于本文所讨论的并联机器人只含有4个分支链,故使用Grass m ann线几何法进行分析相当方便.该并联机器人的4个分支对应4个线矢量,若其中的任意n(2≤n≤4)个线矢量所构成的子空间的秩少于n,则该并联机器人处于特殊形位[2,15].线矢在不同几何子空间下的秩的数目如表1[2].表1 线矢在不同几何空间下的最大线性无关数Tab.1 Nu m bers of li nearly i ndependen tli ne vectors i n var ious sub-spaces序号几何特点线矢数1共 轴12共面平行23平面汇交24空间平行35共 面36空间共点37汇交点在两面交线上的两平面汇交线束3显然,在该并联机器人4个支链对应线矢中:1)不会出现任意两线矢共轴情况;2)不会出现任意3线矢共面情况;3)不会出现任意3线矢平面汇交情况;4)不会出现4线矢空间平行、共面、空间共点情况;5)4线矢不会出现第7种情况.所以,该并联机器人在其工作空间内不会出现特殊形位.5 应用在四自由度并联机器人的动平台下方放置装夹工件的工作台并实现x方向的移动,在动平台上安装电主轴,可以非常方便地实现主轴相对工件之间的五坐标进给运动,5个坐标分别为x,y,z,A,B(其中A代表绕x轴的转动,B代表绕y轴的转动),其工作空间描述与传统机床非常接近.工作空间在工作台移动方向以及滑块导轨方向的尺寸可以按需要匹配,整个系统可以在标准组件的基础上构成.这种系统不仅可以用作铣床,将主轴代之以其他加工单元(如激光、水束、装配器械等),还可以扩大机床的应用范围.若应用于大负载场合,为了平衡x方向的负载,可以将T4S4杆以及T3S3杆制成在x方向分叉的结构或参照文献[13]的方法,增加一个约束机构.6 参考文献[1] 汪劲松,黄 田.并联机床机床行业面临的机遇与挑战[J].中国机械工程,1999,10(10):1103~1107[2] 黄 真,孔令富,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.228~235[3] W ECK M,DAM NO ER M.D esign,calculati on and contro l of m ach ine too ls based on parallel k inem atics[J].P roc T he A S M E,1998,8:715~721[4] L I N L C,T SA Y M U.M odeling and contro l of m icro2po siti oning system s using stew art p latfo r m s[J].JRobo tic System s,2000,17(1):17~52[5] 黄 田,汪劲松,W H IT EHOU SE D J.Gough2stew art平台运动学设计理论与方法[J].中国科学(E辑),1999,29(4):137~145[6] K I M W K,BYUN Y K,CHO H S.C lo sed fo r m fo r w ard po siti on so luti on fo r a62DO F32PPSP parallelm echanis m and its i m p lem entati on[J].Int J of Rob R es,2001,20(1):85~99[7] HON G K S,K I M J G.M ani pulability analysis of a parallel m ach ine too l:app licati on to op ti m al link lengthdesign[J].J Robo tic System s,2000,17(8):403~415[8] CA RR ET ERO J A,NA HON M A,PODHOROD ESK I R P.W o rk space analysis and op ti m izati on of a novel32DO F parallel m ani pulato r[J].Int J of Rob&A ut,2000,15(4):178~188[9] P IERRO T F,DAU CH EZ P,FOU RN IER A.Fast parallel robo ts[J].J Robo tic System s,1991,8(6):829~840[10] S I C I L I ANO B.T he tricep t robo t:inverse k inem atics,m ani pulability analysis and clo sed2loop directk inem atics algo rithm[J].Robo tica,1999,17(4):437~445[11] M ERL ET J P.D eter m inati on of6D w o rk spaces of gough2type parallel m ani pulato r and comparison betw eendifferent geom etries[J].Int J of Rob R es,1999,18(9):902~916[12] JOHN J C.Introducti on to robo tics m echanics&contro l[M].N Y:A ddison2W esley Publ Co,1986.26~2944扬州大学学报(自然科学版)第5卷[13] CH EN W J ,ZHAO M Y ,CH EN S H ,et al .A novel 42DO F parallel m ani pulato r and its k inem atic modeling[J ].P roc IEEE Conf on Rob A ut ,2001:3350~3355[14] HUN T K H .Structural k inem atics of in parallel actuated robo t ar m s [J ].J of M ech T rans &A ut D es ,1983,105:705~712[15] M ERL ETJ P .Singular configurati ons of parallel m ani pulato rs and grass m an geom etry [J ].Int J of Rob R es ,1989,8(5):45~56A NOVEL 4D EGREE OF FREEDOMPARALL EL M AN IPULAT ORCH EN W en 2jia 1 ZHAN G J ian 2feng 1 YAN G L ing 2 ZHAO M ing 2yang2(1.D ep t of M ech Engin ,T ech Inst ,Yangzhou U niv ,Yangzhou ,225009,Ch ina ;2.Shenyang Inst of A utom n ,T he Ch in A cad of Sci ,Shenyang ,110016,Ch ina )Abstract :A novel 4degree 2of 2freedom p arallel p latfo r m m an i pu lato r w h ich is actuated by fou r sliders is p resen ted .T he m ovab le p latfo r m of the m an i p u lato r can tran slate along tw o directi on s and ro tate around tw o axes respectively .T he k inem atics m odel is fo r m u lated ,w h ich describes the inverse k inem atics and fo r w ard k inem atics .It is very easy to develop a 5ax is N C m ach ine 2too l w h ich is of larger 2w o rk space based on the 4degree of freedom p arallel m echan is m p resen ted inth is p aper .Keywords :p arallel m an i pu lato r ;4degree of freedom ;slider 2actuated ;k inem atic m odeling ;singu lar configu rati on s(责任编辑 晓 文) (上接第40面)THE APPL I CAT I ON OF COM PUTER PROBAB I L IT YSI M ULAT I ON ON SETT ING UP STAT IST I CAL FOR M ULAS OFTRANS M ISSI ON ACCURACY OF WOR M GEAR PA IRSZHAO Q ing 1 HU AN G Yue 2guang2(1.D ep t of A ut ,T ech Inst ,Yangzhou U niv ,Yangzhou ,225009,Ch ina ;2.CAD Cen ,Yangzhou V ocat Co ll ,Yangzhou ,225002,Ch ina )Abstract :Seting up the statistical fo r m u las of tran s m issi on accu racy of w o r m gear pairs ,a com p u ter can si m u late the distribu ti on p attern of a erro r and give the values of the erro r random ly .So a certain m esh p rocess can be si m u lated by the com p u ter .T he co rrecti on coefficien ts can be go tten and it can be u sed to m odify the statistical fo r m u las .Keywords :s m all m odu le cylindrical w o r m gear pair ;statistical fo r m u las of tran s m issi on accu racy ;com p u ter p robab ility si m u lati on ;co rrecti on coefficien ts(责任编辑 晓 文)54第2期陈文家等:一种新型四自由度并联机器人。
四自由度混联码垛机器人运动学分析与仿真

XA = 1
( p x / cos 1) - H W + p+ 1
HB
ZA2 =
( p + 1) b +
VBp
VW - b -
pz
( 6)
1=
arct
an
py px
5= - 1
( 7)
式( 6) 和( 7) 即为该混联码垛机器人的位置反解。
3 四自由度混联码垛机器人运动学 分析
对式( 6) 和( 7) 求导数得
理论分析及仿真分析均在以下条件下进行: a. 腕部法兰 盘上一点 P 作为运动验证点, 如 图 2 所示, 该点在坐标系中 X 5 O 5Z5 的齐次坐标为 P= [ 0 0 0 1] T 。 b. 设机 器 人参 数 为: H B = 200m m; V B = 790mm; a = 260mm; b = 240mm; 比例系数 p = 4. 5; H W = 100mm ; V W = 135m m。在坐 标 系 X 2 O2 Z2 中, 水平滑块 A 1 沿 X 2 轴的运动范围为 [ 120, 400] ; 竖直滑块 A 2 沿 Z 2 轴的运动范围为[ 0, 400] , 1 [ 0, 2 ] , 5 [ 0, 2 ] 。
VH = [ p x p y p z ] T = GqH [ XA ZA 1 5] T ( 11)
1
2
4 四自由度混联码垛机器人运动学 仿真
为了验证运动学分析的正确性, 模拟码垛过程 中各关节的运动关系, 在此首先利用 P ro/ E 软件建 立 了 该 机 器 人 三 维 实 体 造 型, 并 将 其 导 入 到 ADAM S 中建立机 器人的 虚拟 样机模 型, 然后 在 ADAM S 环境中进行了运动学仿真, 最后与理论计 算结果进行了比较和分析。
四自由度机器人设计及运动学动力学分析

目录摘要............................................................................................................错误!未定义书签。
Abstract ........................................................................................................错误!未定义书签。
1绪论 (4)1.1 引言 (4)1.2机器人研究现状及发展趋势 (5)1.3本课题的主要研究内容和工作安排 (10)1.3.1课题研究的背景及意义 (10)1.3.2课题研究的内容及安排 (12)2四自由度串联机器人本体结构设计 (13)2.1机器人的总体方案设计 (13)2.1.1抓取机器人功能需求分析及其特点 (13)2.1.2机器人驱动方案的确定 (14)2.1.3机械传动方案的确定 (15)2.1.3机器人基本技术参数设计 (15)2.1.4机器人本体的总体结构 (17)2.2机器人本体基本结构设计 (18)2.2.1大臂和小臂机械结构设计 (18)2.2.2腕部机械结构设计 (20)2.2.3直线组件的设计选择 (20)2.2.4支架结构设计 (21)2.2.5步进电机与减速器的计算和选择 (22)2.2.6机器人传动轴的校核 (25)2.2.7机器人本体的三维模型 (26)2.3本章小结 (27)3四自由度抓取机器人运动学分析及仿真 (28)3.1机器人运动学分析 (28)3.1.1奇次坐标变换 (29)3.1.2 Denavt-Hartenberg(D-H)表示法 (30)3.1.3抓取机器人运动学模型的建立 (32)3.2机器人运动学方程的建立 (33)3.2.1抓取机器人的正运动学分析 (33)3.2.2工业机器人工作空间分析 (35)3.2.3机器人雅可比(Jacobian)关系求解 (38)3.2.4 抓取机器人的逆运动学分析 (41)3.3四自由度串联机器人运动学仿真 (45)3.3.1虚拟样机技术概述 (45)3.3.2本文用到的ADAMS软件模块 (46)3.3.3建立机器人仿真模型 (47)3.3.4机器人位移仿真分析 (49)3.3.5机器人速度仿真分析 (50)3.4 本章小结 (51)4. 轨迹规划及仿真分析............................................................................. 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对四自由度并联机构分析 摘要:并联机构(Parallel Mechanism,简称PM),可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。机构有串联机构,并联机构,各有其优缺点. 关键词:并联机构;四自由度;分析 Analysis of a novel four -degree -of -freedom parallel
mechanism Abstract:Parallel Mechanism is usually called for short PM, which can be defined as the mobile platform and the platform through at least two independent movements of the chain that can be connected. Agencies have series mechanisms, parallel mechanism, each have its advantages and disadvantages. Keywords:parallel manipulator; 4 –DOF; analysis 并联机构比起传统的串联机器人机构具有更高的刚度,更好的精度和承载能力,被广泛应用到航天器对接装置、 雷达定向装置以及虚拟轴高速并联机床等领域,尤其是少自由度并联机器人机构还具有结构简单、 控制方便等优点,被很多研究者关注,不断提出各种新型少自由度并联机器人机构并开展相应分析,在这些并联机构中,连接上下平台的支链主要为传统的串联支链, 由于杆长约束因素, 工作空间较小,无法满足一些特种机器人工作空间大、结构紧凑的要求. 由于平行四边形机构具有较好的缩放特性,有学者将其运用到并联机器人机构的结构综合中, Bruno和Jungw on等利用该机构设计了能够获得大工作空间的机器人操作平台, Nao -hi ro Hara将其应用在飞行机器人的机翼上改善了144%的升力, Grigore Gogu运用该机构设计出了一系列的各向同性的机器人机构, Sbastien Briot设计了具有承载能力大、水平和垂直方向具有独立运动的机器人机构。 本文作者利用平行四边形及其特殊形状—菱形,演绎出具有大缩放比的平行四边形机构支链和菱形机构支链, 通过用菱形机构虚拟轴代替传统串联支链实轴的方法, 提出一种具有结构紧凑、工作空间大的新型四自由度并联机器人机构, 利用螺旋理论对该机构进行了自由度分析。 1 菱形机构设计 如图1 所示,当菱形在运动变形过程中, 同一条虚直线上的各点只有沿直线方向上的相对运动. 取一个菱形, 如图2 所示, 将其顶点用转动副连接, 则此菱形演绎为单菱形运动链.将单菱形运动链 C 点转动轴与机架相连,得到单菱形机构, 如图3 所示,其相邻两边绕该点转动, 对顶角 A 点可以实现绕C点的转动和移动, A 点与C 点之间具有很大的伸缩比,其虚拟轴行程范围为22)2/(2dmLdRb (1)
式中;d 为菱形机构杆厚, m 为菱形机构杆长,RbL为菱形机构等价移动副虚拟轴行程. 当 md 时,一般可以忽略 d . 根据等效替换原理, 该单菱形机构可以等效为图4 所示的RPR 串联支链,而对于图 4所示的实际支链,当移动副采用传统的液压或气压驱动时,取缸体长度等于菱形杆长 m,则移动副行程范围为 mLmp2 (2)
由式( 1)和式( 2)可知菱形机构采用虚拟轴代替传统的实轴,具有较大的伸缩比. 当将图 2 所示单菱形运动链的2、 3 边延长,可以得到图5 所示的菱形放大尺, 与此相应得到菱形放大尺机构如图6 所示,其虚拟轴行程为 22)2/(4dmLdRb (3)
较之单菱机构具有更大的缩放比。 2 新型四自由度并联机构的构型设计 根据并联机构组成原理, 采用两条支链提供相同的约束,另外两条支链不提供约束的方法,设计了一种新型的非全对称的四自由度并联机器人机构,如图7 所示。 并联机构由静平台、动平台和4 条支链组成,支链与支链采用对称的结构配置, 将菱形放大尺机构作为支链主结构, 上端通过 U副与动平台连接,其U 副结构如图 8 所示, 下端通过转动副R 与静平台连接. 支链Ⅰ与支链Ⅲ同样采用对称结构配置,将单菱形机构作为支链主结构,上端通过独立的U 副与动平台连接, 其U 副结构如图 9 所示, 与下端通过转动副R与静平台连接。 根据等效替换原理, 支链Ⅰ与支链Ⅲ可以等效为RPRR 串联运动支链, 运动副配置为 RPU;支链Ⅱ与支链Ⅳ可以等效为 RRPRRR 串联运动支链,运动副配置为R1 R2, R2 P, R1 P, R2 R3,由此得到2RPRR -2RRPRRR 并联机构等效模型如图10 所示. 3 自由度分析 在分析并联机器人机构中,螺旋是一个非常有效的工具.螺旋$可用对偶矢量表示为( s; s0 ) , 当螺旋$的两矢量表示为标量时, 可用 Plcuker 坐标( l m n; o p q )来表示. 如果有两个螺旋$和$ r , 若它们满足下述条件:0rss 则s与rs互为易积。 如果螺旋$ 描述的是刚体的瞬时运动, 则螺旋前3 个坐标描述的是角速度,后 3 个坐标描述的刚体上某一点相对参考坐标系原点的瞬时线速度,称此螺旋为运动螺旋.与此相应, 反螺旋$ r 描述的则是作用在刚体上的约束力或约束力偶,螺旋的前3 个坐标描述的是约束力, 后 3 个坐标描述的是相对于参照系原点的约束力矩, 称此螺旋为力螺旋.其中0 节距的力螺旋描述的是力, 无穷大节距的力螺旋则为力偶。 如图 8 所示, 在静平台上建立基础坐标系OX YZ, X 轴与 Y 轴在静平台平面内, Z 轴与静平台平 面 垂 直; 在 动 平 台 上 建 立 坐 标 系 动O 1X 1 Y1Z1, Z1 轴与动平台平面垂直. 建立并联机构各支链运动螺旋系, 在支链 中, $ 11 O1 Y,$ 12 $ 11, $ 13 $ 12, 且$ 13 $ 11, $ 14 $ 13;在支链中: $ 21 O1X , $ 22 $ 21, $ 23 $ 22. 支链Ⅰ的运动螺旋系为:T111101000sc
T121212s000a0c
T131313s0100ac
T141410000sb
式中 a1j、 b1j、 c1j分别是由螺旋$ 1j空间位置所决定的确定参数。 根据式( 5)可以求得支链的约束反螺旋系为:T11000001rs
T121401000rsb
从支链的反螺旋系可以看出, 支链对动平台提供两个约束, 即限制了动平台绕 Z 轴的转动和沿 Y 轴的移动. 支链Ⅲ与支链Ⅰ具有相同的结构相同, 同理可求得支链Ⅲ的运动螺旋系为: T3131=01000s
T323232000a0cs
T333333s0100ac
T3434s10000b
式中 a3j、 b3j、 c3j分别是由螺旋$ 3j空间位置所决定的确定参数。 由式( 7)求得支链的约束反螺旋系为: T3r
1s000001
T323401000rsb
则支链也对动平台提供两个约束, 限制了动平台绕 Z 轴的转动和沿Y 轴的移动.由于支链和支链为对称配置,则支链、支链对动平台同时限制了动平台绕 Z 轴的转动和沿Y 轴的移动。 支链Ⅱ的运动螺旋系为:T212110000sc
T22222222000sa
T23232323232323sabc
T2422222424240sabc
T25232323252525sabc
T26262626262626sabc
式中: 2j、 2j、 3j分别为螺旋$ 2j在坐标轴X 、 Y 和Z 上的方向余弦; a2j、 b2j、 c2j分别为由螺旋$ 2j空间位置所决定的确定参数。 由式( 9)求得支链的约束反螺旋系为: T2000000rs
从支链Ⅱ的反螺旋系可以看出, 支链Ⅱ对动平台不提供约束, 只起到支撑的作用.支链Ⅳ与支链Ⅱ具有相同的结构配置, 同理可求得支链Ⅳ对动平台不提供约束. 综上所述,在 4 条支链中,只有支链Ⅰ、 支链Ⅲ对动平台提供2 个约束, 限制了动平台绕 Z 轴的转动和沿 Y 轴的移动, 使机构还具有 4 个自由度, 即沿X 轴和Z 轴的移动自由度以及绕X 轴、Y 轴的转动自由度。 4 结语 根据菱形放大尺工作原理设计了具有大缩放比的单菱形机构和放大尺机构, 将其作为运动支链主结构,通过合理配置运动副,连接并联机构的静平台和动平台, 设计出一种新型非完全对称的四自由度并联机器人机构.利用等效替换原理,将菱形机构虚拟轴用传统串联支链实轴替换, 得到新型四自由度并联机构的等效模型. 在此基础上运用螺旋理论对其各运动支链的约束和动平台自由度进行了分析,分析结果表明该机构具有2 个转动自由度和2 个移动自由度. 该机构具有结构紧凑、 工作空间大的特点,可用于航天对接、 军事平台等携带占用空间小、工作扩展空间大的场合。