基于Proteus的无刷电机系统仿真研究
一种基于Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法一、本文概述无刷直流电机(Brushless DC Motor, BLDC)以其高效率、低噪音、长寿命等优点,在航空航天、电动汽车、家用电器等领域得到广泛应用。
为了对无刷直流电机控制系统进行性能分析和优化,需要建立精确的数学模型并进行仿真研究。
Matlab作为一种强大的数学计算和仿真软件,为无刷直流电机控制系统的建模仿真提供了有力支持。
二、无刷直流电机控制系统原理1、无刷直流电机基本结构和工作原理无刷直流电机(Brushless Direct Current Motor,简称BLDCM)是一种基于电子换向技术的直流电机,其特点在于去除了传统直流电机中的机械换向器和电刷,从而提高了电机的运行效率和可靠性。
无刷直流电机主要由电机本体、电子换向器和功率驱动器三部分组成。
电机本体通常采用三相星形或三角形接法,其定子上分布有多个电磁铁(也称为线圈),而转子上则安装有永磁体。
当电机通电时,定子上的电磁铁会产生磁场,与转子上的永磁体产生相互作用力,从而驱动转子旋转。
电子换向器是无刷直流电机的核心部分,通常由霍尔传感器和控制器组成。
霍尔传感器安装在电机本体的定子附近,用于检测转子位置,并将位置信息传递给控制器。
控制器则根据霍尔传感器提供的位置信息,控制功率驱动器对定子上的电磁铁进行通电,从而实现电机的电子换向。
功率驱动器负责将控制器的控制信号转换为实际的电流,驱动定子上的电磁铁工作。
功率驱动器通常采用三相全桥驱动电路,具有输出电流大、驱动能力强等特点。
无刷直流电机的工作原理可以简单概括为:控制器根据霍尔传感器检测到的转子位置信息,控制功率驱动器对定子上的电磁铁进行通电,产生磁场并驱动转子旋转;随着转子的旋转,霍尔传感器不断检测新的转子位置信息,控制器根据这些信息实时调整电磁铁的通电状态,从而保持电机的连续稳定运行。
由于无刷直流电机采用电子换向技术,避免了传统直流电机中机械换向器和电刷的磨损和故障,因此具有更高的运行效率和更长的使用寿命。
无刷电机的proteaus仿真设计

目录设计总说明 (1)GENERAL DESCRIPTION OF THE DESIGN (3)1 绪论 (5)1.1课题研究的背景和意义 (5)1.2本课题的研究现状 (6)1.2.1本课题研究的国外现状 (6)1.2.2本课题研究的国现状 (7)1.3课题研究主要容 (7)2 永磁无刷直流电动机的工作原理 (9)2.1倒直流无刷电动机的结构 (9)2.2直流无刷电动机工作原理 (10)2.3直流无刷电动机的电动机特性 (13)2.3.1机械特性 (13)2.3.2调节特性 (14)2.4永磁无刷电动机的数学模型 (14)2.5本章小结 (15)3 BLDC控制系统的硬件设计 (16)3.1控制核心及按键电路 (16)3.2转速显示部分及档位显示部分 (17)3.3 驱动电路 (19)3.4转速检测电路 (20)3.5 直流无刷电动机的Proteus仿真模型 (21)3.6 本章小结 (22)4 BLDC控制系统的软件设计 (23)4.1软件部分综述 (23)4.2主函数 (25)4.3显示函数 (26)4.4按键检测函数 (27)4.5PWM波发生函数 (29)4.6 电动机控制逻辑 (32)4.7 PID控制与实现.. (33)4.7.1 PID控制的基本概念 (33)4.7.2 PID的参数整定 (34)4.7.3 PID算法的程序编写 (35)4.8本章小结 (37)5 BLDC转速控制系统的仿真 (38)5.1仿真环境简介 (38)5.2仿真步骤 (40)5.3波形分析 (44)5.4本章小结 (46)总结与展望 (47)参考文献 (49)附录A (51)附录B (61)附录C (62)本科期间发表论文 (63)致 (63)无刷直流电动机的单片机控制与仿真设计总说明无刷电动机是一种用电子换向取代机械换向的新一代电动机,与传统的直流电动机相比,其具有过载能力强,低电压特性好,启动电流小等优点,同时由于采用了电子换向取代了机械换向,使电动机的使用寿命得到很大的提高,所以近年来在工业运用方面大有取代传统直流电动机的趋势,研究无刷直流电动机的驱动控制技术具有重要的实际应用价值。
基于Proteus和AVR单片机的无刷直流电机控制系统仿真

基于Proteus和AVR单片机的无刷直流电机控制系统仿真孙晓旭;王劲松;安志勇【摘要】文中设计的无刷直流电机控制系统选择ATmega128单片机作为主控芯片,使用了EDA工具软件Proteus设计了无刷直流电机的控制系统,并进行了仿真实验。
在仿真实验中利用Proteus软件的仿真功能,进行了电机转速控制的实验,控制系统的可行性以及转速控制效果得到了验证。
实验过程中能直观地看到实验结果,所设计的系统满足了无刷直流电机转速控制的要求,电机运行稳定,在硬件电路和软件设计都有一定的辅助作用。
%This paper designed a BLDCM simulation control system, which chose ATmega128 single-chip microcomputer as its main control chip, with the EDA tools software Proteus and AVR Studio software platform. Using Proteus finished the simulation experiment, tested the feasibility and the controlling result of control system. Experimental results show that the control system can meet the design requirements of controlling the BLDCM's revolving speed. The system's function is stable and reliable and it can assist the design of hardware circuit.【期刊名称】《电子设计工程》【年(卷),期】2015(000)019【总页数】4页(P174-176,180)【关键词】Proteus;AVR单片机;无刷直流电机;仿真;控制系统【作者】孙晓旭;王劲松;安志勇【作者单位】长春理工大学光电工程学院,吉林长春 130022;长春理工大学光电工程学院,吉林长春 130022;长春理工大学光电工程学院,吉林长春 130022【正文语种】中文【中图分类】TN710永磁无刷直流电动机不使用电刷和换向器组成的机械换向机构而是使用电子的直流电动机。
基于 Matlab 的无刷直流电机控制系统仿真研究
基于 Matlab 的无刷直流电机控制系统仿真研究谢少华;瞿遂春【期刊名称】《新型工业化》【年(卷),期】2015(000)003【摘要】This paper analyzes the operation principle of Brushless DC motor, this paper proposes a new method based on Matlab modeling, namely through the synchronous motor model of the original Matlab, change the inverse electromotive forceparameters, then the external set position detection and commutation circuit, which can be convenient for brushless DC motor control system the simulation model. This paper introduce the sub-modules of the controlling system in detail., at the same time, the simulation results are compared with the experimental results. Results show that, the simulation results are consistent with the experimental results, a new method of modeling in Matlab can correctly reflect the performance of Brushless DC motor control system and provides an important basis for the design and debugging of the actucal control system.%本文在分析无刷直流电机运行原理的基础上,提出了一种基于 Matlab 建模的新方法,即通过Matlab 中原有的同步电机模型,改变其反相电动势参数,然后在外部搭建位置检测与换相电路,可以方便快捷的构成无刷直流电机控制系统仿真模型。
基于Proteus的无刷直流电机控制系统设计
17作者简介:高珮文(1996— ),女,硕士研究生,研究方向为电力系统自动化。
高文,李乾坤,刘圣荇,王皓,吴旭鑫(西安工程大学 电子信息学院,陕西 西安 710089)摘 要:基于STM32F103C6芯片控制的双闭环控制系统的整体电路图,设计出了无刷直流电动机驱动电路、逆变电路、速度检测电路和电流检测电路;利用PID 算法,通过双闭环调速,能够使得无刷直流电机平稳运行,并在转速发生变化时,快速达到准确值。
通过对双闭环检测算法的优化,使得调速更加精确。
利用Proteus 软件对整体系统进行了仿真验证,实验结果表明,系统结构设计合理,硬件设计方案可行,控制算法正确。
关键词:无刷直流电机控制;Proteus 仿真;双闭环控制;数字式PID 调速中图分类号:TM36+1 文献标识码:A 文章编号:1007-3175(2021)05-0017-05 Abstract: Based on the overall circuit diagram of double closed-loop control system controlled by the STM32F103C6 chip, this paper makes designs of drive circuit, inverter circuit, speed detection circuit and current detection circuit of the brushless DC motor. The brushless DC motor can run smoothly and quickly reach an accurate value when the speed changes through applying PID algorithm and the double closed-loop speed regulation. In addition, the double closed-loop detection algorithm can be optimized to make the speed regulation more ac-curate. The whole system has been simulated in the Proteus, and the experimental results show that the system structure design is reasonable, the hardware design scheme is feasible, and the control algorithm is correct.Key words: brushless DC motor control; Proteus simulation; double closed-loop control; digital PID speed regulationGAO Pei-wen, LI Qian-kun, LIU Sheng-xing, WANG Hao, WU Xu-xin(School of Electronics and Information, Xi’an Polytechnic University, Xi’an 710089, China )Design of Brushless DC Motor Control System Based on Proteus基于Proteus的无刷直流电机控制系统设计0 引言随着工业的不断发展,电机的控制也涌现出越来越多的方式,而伴随着微处理器与电力电子技术的诞生与发展,用微处理器控制电机也成为一项值得研究的技术;随着我国工业化生产发展,对于电机的要求也越来越高[1],而无刷直流电机作为一种结构简单、调速性能好、启动转矩大、寿命长、噪音小的电机有了非常广泛的应用[2];伴随着电力电子技术、计算机技术和传感器技术的迅速发展,无刷直流电机的控制也有了突破性的发展[3],目前我国对永磁无刷直流电机的应用起步较晚,在民用方面仍然存在一些缺陷[4]。
基于DSP的无刷直流电机控制系统设计和仿真研究

基于DSP的无刷直流电机控制系统设计和仿真研究一、本文概述随着现代控制理论和电子技术的飞速发展,无刷直流电机(Brushless DC Motor, BLDC)以其高效率、高可靠性以及优良的调速性能,在航空航天、电动汽车、家用电器和工业自动化等众多领域得到了广泛应用。
然而,无刷直流电机的控制涉及复杂的电磁学、电力电子和控制理论,如何实现其高效、稳定的控制成为研究热点。
数字信号处理器(Digital Signal Processor, DSP)作为一种高性能的微处理器,具有强大的数据处理能力和丰富的外设接口,非常适合用于无刷直流电机的控制。
通过DSP,可以实现电机的精确控制,提高电机的运行效率和稳定性。
本文旨在探讨基于DSP的无刷直流电机控制系统的设计和仿真研究。
介绍了无刷直流电机的基本结构和工作原理,分析了其控制难点和关键技术。
详细阐述了基于DSP的电机控制系统的硬件和软件设计,包括功率驱动电路、控制电路、采样电路等硬件设计,以及控制算法、软件架构等软件设计。
通过仿真实验验证了控制系统的可行性和有效性,为无刷直流电机的实际应用提供了理论和技术支持。
本文的研究内容不仅有助于深入理解无刷直流电机的控制原理,也为无刷直流电机的优化设计提供了有益的参考。
本文的研究成果对于推动无刷直流电机控制技术的发展和应用具有一定的理论价值和实际意义。
二、无刷直流电机的基本原理无刷直流电机(Brushless DC Motor, BLDC)是一种采用电子换向技术替代传统机械换向器的直流电机。
其基本原理是利用电子换向器(通常是功率电子开关如MOSFET或IGBT)控制电机的定子电流,从而实现电机的连续旋转,无需机械换向器与电刷之间的物理接触。
这种设计使得无刷直流电机具有更高的效率、更长的寿命以及更低的维护成本。
无刷直流电机通常包含一个永磁体转子和一个带有多个极对的定子。
定子上的极对数量决定了电机的极数,极数越多,电机的旋转越平滑。
基于Proteus的电机温度巡检系统的设计与仿真
收稿日期:2011-03-16作者简介:郭宝生(1973—),男,河南商丘人,郑州市电子信息工程学校讲师,主要从事单片机设计与开发研究。
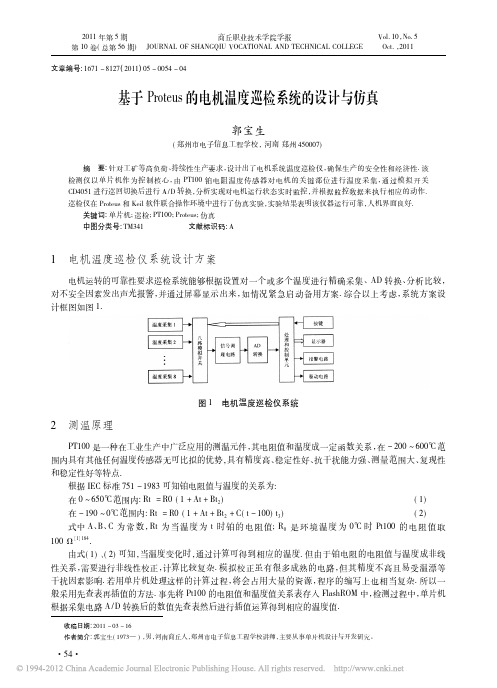
文章编号:1671-8127(2011)05-0054-04基于Proteus 的电机温度巡检系统的设计与仿真郭宝生(郑州市电子信息工程学校,河南郑州450007)摘要:针对工矿等高负荷、持续性生产要求,设计出了电机系统温度巡检仪,确保生产的安全性和经济性.该检测仪以单片机作为控制核心,由PT100铂电阻温度传感器对电机的关键部位进行温度采集,通过模拟开关CD4051进行巡回切换后进行A /D 转换,分析实现对电机运行状态实时监控,并根据监控数据来执行相应的动作.巡检仪在Proteus 和Keil 软件联合操作环境中进行了仿真实验,实验结果表明该仪器运行可靠,人机界面良好.关键词:单片机;巡检;PT100;Proteus ;仿真中图分类号:TM341文献标识码:A1电机温度巡检仪系统设计方案电机运转的可靠性要求巡检系统能够根据设置对一个或多个温度进行精确采集、AD 转换、分析比较,对不安全因素发出声光报警,并通过屏幕显示出来,如情况紧急启动备用方案.综合以上考虑,系统方案设计框图如图1.图1电机温度巡检仪系统2测温原理PT100是一种在工业生产中广泛应用的测温元件,其电阻值和温度成一定函数关系,在-200 600ħ范围内具有其他任何温度传感器无可比拟的优势,具有精度高、稳定性好、抗干扰能力强、测量范围大、复现性和稳定性好等特点.根据IEC 标准751-1983可知铂电阻值与温度的关系为:在0 650ħ范围内:Rt =R0(1+At +Bt 2)(1)在-190 0ħ范围内:Rt =R0(1+At +Bt 2+C (t -100)t 3)(2)式中A 、B 、C 为常数,Rt 为当温度为t 时铂的电阻值;R 0是环境温度为0ħ时Pt100的电阻值取100Ω[1]184.由式(1)、(2)可知,当温度变化时,通过计算可得到相应的温度.但由于铂电阻的电阻值与温度成非线性关系,需要进行非线性校正,计算比较复杂.模拟校正虽有很多成熟的电路,但其精度不高且易受温漂等干扰因素影响.若用单片机处理这样的计算过程,将会占用大量的资源,程序的编写上也相当复杂.所以一般采用先查表再插值的方法.事先将Pt100的电阻值和温度值关系表存入FlashROM 中,检测过程中,单片机根据采集电路A /D 转换后的数值先查表然后进行插值运算得到相应的温度值.2011年第5期第10卷(总第56期)商丘职业技术学院学报JOURNAL OF SHANGQIU VOCATIONAL AND TECHNICAL COLLEGE Vol.10,No.5Oct.,2011郭宝生:基于Proteus的电机温度巡检系统的设计与仿真第5期3系统硬件设计3.1温度巡检采样电路设计发电机工作时的各种损耗都会使内部温度升高,定子的温度最为关键,通过对其定子进行温度监控可以预测其工作状态.在电机的定子绕组中的每相线圈中埋设2个Ptl00,三相共埋设6个,近似间隔60度均匀分布在定子中.另外,还需在电动机轴承的两端各埋设1个Ptl00.通过这8个关键部位的温度采样即可准确的反映出电机当前的工作状态.由于电机内部体积有限,对每一路信号都设调理电路体积庞大,成本昂贵,可靠性不高,因此采用模拟开关对8路信号切换采集处理简单可靠.CD4051是单8通道数字控制模拟电子开关,有三个二进控制输入端A、B、C和INH输入,具有低导通阻抗和很低的截止漏电流.幅值为4.5 20V的数字信号可控制峰值至20V的模拟信号.三位二进制信号选通8通道中的一个通道,可连接该输入端至输出.PT100采用四线制电桥式接法,可以将其两侧相等的的导线长度分别加在两侧的桥臂上,使得导线电阻得以消除,测量比较准确.除地端(E-)外,另外三端都必须同步切换选中一路信号进行采样及后续处理.其中CD4051接入PT100传感器电源的方法如图2所示.图2CD4051对8路PT100电源端的切换3.2信号调理电路设计巡检仪的PT100温度传感器采用电桥式接法,如果其电源端直接使用VCC,电网电压的波动会引起VCC波动,造成调理电路的输出信号波动,最终导致测量的不准确,所以其电源端必须接稳定的基准电压.TL431是一个具有良好的热稳定性能的三端可调分流基准源,它的输出电压用两个电阻就可以任意地设置到从Vref(2.5V)到36V范围内的任何值[2],由其构成的5V稳压基准电路如图3所示.电机内部各监控点PT100电阻值随着该点温度的变化使电桥产生不平衡的电压差,这个信号通过模拟开关选择后,由调理电路进行放大处理最终送入A/D转换器得到对应的数值.如图4所示,由三个模拟开关同步切入的Pt100的E+、S+、S-3路信号,并接入惠斯通电桥的一臂,在稳定的5V参考电压Vref的作用下,Pt100与100Ω标准精密电阻R3产生微弱的压差信号,经由LM324组成的两级差分比例运放电路处理后进行A/D转换.图3基准电压源图4温度信号调理电路图4中,R3上的电压为uI1,信号经第一级放大后输出电压为u O1,S+电压为u I2,第二级放大后输出电压为u O2,则该调理电路的输入输出关系为:u O1=(1+R 6R 4)u I1(3)u O2=-R 9R 7u O1+(1+R 9R 7)u I2=-R 9R 7(1+R 6R 4)u I1+(1+R 9R 7)u I2(4)若取R 4=R 9,R 6=R 7则u O2=(1+R 9R 7)(u I2-u I1)(5)恰当地选取式(5)中的电阻值可以进行相应倍数的电压放大.这里设放大倍数为52,则分别取R 4=R 9=51k Ω,R 6=R 7=1k Ω,另外让R 5=R 8=1k Ω以匹配放大器正反相端输入阻抗.3.3A /D 转换电路和显示电路A /D 转换电路采用ADC0832.ADC0832为8位分辨率A /D 转换芯片,其最高分辨可达256级,可以适应一般的模拟量转换要求.其内部电源输入与参考电压的复用,使得芯片的模拟电压输入在0 5V 之间.芯片转换时间仅为32μS ,据有双数据输出可作为数据校验,以减少数据误差,转换速度快且稳定性能强.独立的芯片使能输入,使多器件挂接和处理器控制变的更加方便.通过DI 数据输入端,可以轻易的实现通道功能的选择.系统采用12864液晶显示屏作显示器件,用于显示相应通道的温度、警示信息等.A /D 转换和显示电路与单片机的接口如图5所示.图5A /D 转换和显示电路与单片机的接口4巡检仪软件设计及仿真4.1程序流程巡检仪系统整体工作流程如图6所示.图6巡检仪工作流程程序对系统初始化之后,首先扫描键盘看是否需要对所有通道进行检测,如果需要则发出指令到模拟2011年商丘职业技术学院学报郭宝生:基于Proteus的电机温度巡检系统的设计与仿真第5期开关,切换到对应通道,由调理电路对相应的电压信号进行处理送DS0832进行A/D转换.转换后的数字量由CPU查PT100电阻分度表,并进行插值运算得到对应的温度值,然后与上一次的测量值以及极限值比较分析看电机是否工作正常,如果不正常就要做相应的响应动作,超出额定温度时启用备用电机并声光报警,如果温度上升过快则只进行声光报警提示操作人员及时排除故障.LCD显示屏始终显示相应的提示信息,以方便人机交互.4.2系统仿真Proteus软件是目前流行的单片机及其外围器件的仿真工具,它可以仿真MCS-51系列、PIC、AVR等常用的MCU及其外围电路(如LCD,RAM,ROM,键盘,马达,LED,AD/DA,部分SPI器件,部分IIC器件等)[3].本设计用到的仿真元件如表1所示.表1系统仿真元件列表序号元件仿真元件数量序号元件仿真元件数量1单片机AT89C5117TL431TL43112PT100传感器RTD-PT10088LM324LM32413CD4051模拟开关405139MAX232MAX2321412864显示屏AMPIRE128ˑ64110按键BUTTON95ADC0832ADC0832111电阻RES若干6极性电容CAP-POL若干12电容CAP若干系统仿真主要分为PT100传感器、模拟开关、基准电压源、信号调理电路、AD转换电路、键盘、串口电路、单片机及显示电路、示警电路.在Proteus软件里绘制完仿真电路图后,双击单片机,弹出对话框,点击“Program file”文本框后面的按钮,将编译的“温度巡检.hex”目标文件载入,就可以观察系统运行的结果了.5结论该巡检仪以Proteus为平台,利用其丰富逼真的单片机等仿真元件和仪表设备,绘制并搭建了硬件系统;利用其强大的程序仿真能力开发了软件程序;对硬件和软件进行了联合仿真,实现了对电机温度等状态实时巡检的功能,达到了预期效果.参考文献:[1]杨雷,杨杰.基于PT100的气温精确测量[M]//湖北省科学技术协会.第十九届电工理论学术年会论文集,2007,185-190.[2]潘玉成.可调式精密稳压集成电路TL431及应用[J].宁德师专学报(自然科学版),2008,(20):51.[3]彭伟.单片机C语言程序设计实训100例———基于8051+Proteus仿真[M].北京:电子工业出版社,2009.[责任编辑冯喜忠]The Design and Simulation of Motor Temperature Data Logging Devices Based on ProteusGUO Bao-sheng(Zhengzhou Electric and Information Engineering School,Zhengzhou450007,China)Abstract:For mining high-load,continuous production requirements,the motor system temperature detection apparatus was designed to ensure production safety and economy.Using the microcontroller as the core to process the PT100platinum resistance temperature datum,which was on the key parts of the motor,across CD4051to switch to do the AD conversion and monitor the status of the motor in order to perform the appropriate action.Simula-tion experiment of the device was executed in the Keil and Proteus joint operating environment and the result shows that the reliability and performance of the instrument can be good and has a good man-machine interface.Key words:MCU;inspection;PT100;Proteus;simulation。
基于ANSOFT的永磁直线无刷直流电动机的仿真研究

Simulation and Analysis of Linear PM Brushless DC Motor Based on ANSOFT
鲁 军 勇 1978 年 6 月 生, 2001 年毕 业 于 武 汉 海军工程大学电气工 程 系, 学 士学 位。 现 为 西 安交通大学电机及其 控 制工程系在读硕士研 究 生。研究方向为直线 电 机设计及其控制。
通电 绕组 A+ CC- B+ B+ AA- C+ C+ BB- A+
( A+ C- ) ( C- B+ ) ( B+ A- ) ( A- C+ ) ( C+ B- ) ( B- A+ ) , 从这里可以看到, 在动子 进行一个周期内, 动子绕组将经过 6 次换相。根 据动子所处位置范围及通电绕组次序, 我们可以 得到逆变器驱动逻辑信号, 如表 1 示。根据表 1, 我们可以利用 MAXSWELL 2D 提供的电路元件搭 构简单的逆变器模型如图 2 所示。驱动电路模型 如图 3 所示。开关 K1~ K6 的通断时机受受控电 压源 V1~ V6 控制。
图 1 逆变器模型
图 2 驱动电路模型
3 系统仿真结果及其分析
本文中 LPMBDCM 的模型 参数如表 2 所示。 电机有 18 个槽, 每极每相是一个槽, 采用双层整 距分布绕组形式。导电方式是两两导通三相星型
六状态。初级是三相线圈, 次级是 N, S 相间的永 磁体。设置粘制摩擦系数 100N s m- 1 , 初级总质 量为 5kg, 电动 机空载起 动。图 4 为 t = 0. 2865s 的电机磁场分布图。利 用 ANSOFT 软件, 我们还 可以得到电机的转速、电磁推力、法向力、相电流、 反电势、磁链、损耗等。图 5 是A 相电流曲线。从 图中可 以看 出当 功率 管轮 换导 通时, A 相 电流 有一个小的波动, 这是由于功率管开关时有上升
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Proteus的无刷电机系统仿真研究
作者:王伟石欢欢刘海强时洋洋
来源:《电子技术与软件工程》2017年第16期
摘要
本文介绍了无刷直流电机(Brushless DC Motor,BLDCM)的工作原理,分析了其换相逻辑,对电机系统在Proteus环境下进行了建模和调试,在此基础上对电机开环系统的工作性能进行了仿真和分析,并着重设计和实现了基于Arduino单片机的转速闭环系统。
通过仿真结果,验证了该电机具有良好性能,控制系统设计合理,具有可行性。
【关键词】无刷直流电机 Proteus PID算法
目前,工业上常用的电力拖动系统包括同步电动机、异步电动机、有刷直流电动机、无刷直流电动机等,其中交流机占主导地位,特别是异步电动机。
但在有些领域上,异步电动机暴露了其自身功率因数滞后,轻载功率因数低,调速性能稍差等缺点。
因此在调速性能要求较高的大型设备如乳钢机,都采用有刷直流电动机拖动,但其存在着直流换向问题,结构复杂且不方便维护维修。
近年来无刷直流电动机及其控制技术发展迅猛,有效地解决了有刷直流电机的主要缺陷。
无刷直流电动机取消了普通直流电电机的滑环、碳刷结构,绕组多采用三相星形接法,转子为永磁体,并具有检测转子位置的霍尔传感器。
电机具有直流电动机的所有优点,并具有体积小、重量轻、出力大、结构简单、响应快、启动转矩大、转矩恒定等诸多优点。
因此,BLDCM以其卓越性能,在越来越多的拖动和伺服控制场合替代现有的直流调速电机、变频电机、以及异步电机等,成为性价比最高的选择。
Proteus是英国Labbcenter公司开发的电路分析与仿真软件,可以分析各种模拟器件和集成电路,具有模拟电路、数字电路仿真、单片机及外围电路仿真功能。
1 BLDCM工作原理
无刷直流电动机作为一种典型机电一体化产品,由电机本体、逆变电路、控制器、及位置传感器组成的电动机系统。
控制器通过对位置传感器检测出的转子磁极位置信号进行逻辑整合后可以得到逆变电路各功率开关管相应的触发信号,从而使电源功率按逻辑分配给各相定子绕组,电机产生顺向电磁转矩。
无刷直流电机本体结构如图1所示。
每次换相过程中,电机三相绕组中会有一相绕组接电源正,另一相绕组接负,第三相绕组失电,绕组电流从接正端流入,接负端流出。
通电的定子绕组会产生磁场,该磁场与转子永磁体互相作用会产生电磁转矩。
理想状态下,电磁转矩峰值出现两个磁场正交时,而在两磁
场平行时最弱,转子会向着与定子磁场方向平行的方向转动。
因此,当定子绕组产生的磁场不断变换位置时,转子会受到顺向磁拉力的作用,从而实现固定方向的旋转运动。
霍尔位置传感器信号(HA、HB、HC),通过改变逆变器功率开关管的导通顺序,可实现电机正转(顺时针)或反转(逆时针)。
BLDCM正转时,在一个360°的通电周期内,霍尔信号HA、HB、HC与逆变器功率器件(T1〜T6)之间的换相逻辑和对应的三相绕组相电压(Ua、Ub、Uc)波形如图2所示。
电机反转时,情况类似推理。
表1给出了Y连接两相导通三相六状态无刷直流电机正/反转时的换相逻辑关系和绕组电流方向。
当电机正转时,六只功率管的导通顺序是:Tl、T2→T3、T2→T3、T4→T5、T3→T5、T6→Tl、T6,依次循环。
在电机正转,功率管Tl、T2导通时,电流从直流电源正极开始,依次流过T1管、A相绕组和C相绕组,并经T2管流回电源地,其他功率管导通时情况类似。
因此,根据上述逻辑关系可以得到各开关管的控制逻辑表达式如下式(1)所示。
2 开环系统建模与仿真
根据无刷直流电机工作原理,在Proteus环境里对无刷直流电机开环系统进行仿真。
Mechanical器件库支持星形连接、三角形连接方式,本文采用星形连接方式的无刷直流电机BLDC-STAR。
根据电机仿真参数,电源选择24VDC,主功率电路中的功率开关管选用型号为IRF540的MOSFET。
电机霍尔传感器输出信号为HA、HB、HC,根据公式(1)采用与门、非门对霍尔信号进行逻辑运算,将运算结果T1〜T6分别接MOS管的门极,得到BLDCM开环仿真模型如图3所示。
运行系统,得到电机开环转速和相电流波形图如图4、5所示。
根据图4仿真波形可知,电机的开环额定转速为730r/min,系统稳态响应良好;电机起动时间和起动转速超调在可接受范围内且稳态转速波动较小,系统动态性能较好。
由图5仿真波形可知,电机的电流稳态波形良好,波动较小且毛刺较少,启动过程也基本平稳。
根据仿真结果可知,该电机的稳态和动态性能良好,可满足一般运动控制系统要求。
3 闭环系统建模与仿真
BLDCM闭环控制系统需要用到模拟量采集,外部中断计数,PWM输出功能,主控芯片选择了Arduino单片机。
Arduino是一款使用AtmelAVR单片机的开放性单芯片控制器,片上含有丰富的资源,具有输入捕获、输出比较、PWM模式、串行UART通信等功能,支持内置数
模转换ADC。
闭环控制还需要用到脉冲宽度调制技术(Pulse Width Modulation,PWM),将模拟给定信号转换为周期固定,占空比依模拟信号大小而变化的数字控制信号。
BLDCM有多种斩波方式,此处采用“PWM-ON”方式或“上斩下不斩”方式,即逆变桥上桥臂的三个开关管采用PWM斩波,下桥臂采用正常导通方式。
利用Ardino的109口产生PWM信号,将其与控制信号Tl、T3、T5相与,从而实现电机转速闭环控制,仿真模型如图6所示。
针对于电机调速,我们采用比例积分的方式调节:
在程序中e(k)是预设速度值与实际速度值得偏差,积分项e(k-l)是本次速度偏差与上次速度偏差的差值。
在Proteus中实现的关键程序如下:
其中,给定值SetPoint是电位器分压经AD转换后的值,原参数范围是0〜1024之间,在仿真中我们对其进行映射为转速0〜600r/min,Pulse为仿真中实际电机转速。
程序运算输出值关键在于确定Kp与Ki,首先确定Kp的值,先不加积分环节,比较不同Kp值对电机转速的影响,依照超调量不能过大、响应时间不能过长的原则确定Kp值取值范围,之后加上积分环节,调节Ki值,确定最佳的Kp和Ki值。
经调试,Kp值设置为0.3,Ki值设置为0.15,电机响应效果最佳。
如图7所示的是在此控制参数下,给定转速为300时,电机实际转速波形。
分析仿真波形可知,闭环系统中,电机转速从0开始逐渐爬升并逐步稳定到给定转速300r/min,在此过程中,存在一定超调量,调节时间相对较短,系统具有良好的转速闭环特性,稳态和动态性能良好。
4 结论
本文对无刷直流电动机的工作原理、运行方式以及闭环调速系统进行了分析,并在Proteus中对系统进行了开环控制和闭环调速仿真。
经验证,系统具有良好稳态和动态性能,适合用于运动伺服控制系统。
通过分析总结无刷直流电动机调速系统的工作方式、调速方法及可能遇到的问题,为下一步进行实物设计打下了基础。
参考文献
[1]朱杰.基于PIC16F1933的无刷直流电机控制器的研究与实现[J].科技风,2013,24(10):40-42.
[2]林明耀,陈华锋等.永磁无刷直流电动机的控制技术研究综述[J].机械制造与自动化,2016,6(06):1-3.
[3]钟炜,李泽滔.基于AT89S52单片机的电子记分牌设计[J].现代机械,2015,6(01):83-86.
[4]王林涛.BLDCM驱动的电动门控系统的研究[D].上海:上海交通大学,2008.
[5]王淑红,熊光煜.无刷直流电动机特性有限元分析[J].微电机,2007,12(06):42-45.
[6]高辉,姚莉莉.“六步换向”法控制无刷直流电机设计[J].防爆电机,2012,6(04):3-5.。