现代信号处理胡广元第二章
现代信号处理方法2-2
2.2 Radon-Wignel 变换2.2.1 Wigner-Ville 分布的时频聚集性时变信号中,线性调频(LFM )信号特别引人关注:首先, LFM 信号广泛用于各种信息系统,如通信、雷达和地震勘探等;其次,探测系统的目标多普勒频率与目标速度近似成正比,当目标作等加速运动时,回波即为线性调频;再次,复杂运动目标回波在一段短的时间里,常可用线性调频作为其一阶近似;另外,对于空间线性阵列,若信号源位于近场,则沿阵列分布的信号也近似为线性调频。
因此深入研究线性调频信号具有重大的理论价值与实际应用价值。
用Ville Wigner -分布研究单分量LFM 信号是十分有效的:现考虑幅度为1的单分量信号)5.0(220)(m t t f j et z +=π (2.2.1) 因为 τπττπττπττ)(2])2(21)2([2])2(21)2([2*02020)2()2(mt f j t m t f j t m t f j e e et z t z +-+--+++=⋅=-+ (2.2.2) 故根据(1.3.32)可求得其Ville Wigner -分布为⎰∞∞--+⋅=τπττπd e e f t W f j mt f j LFM 2)(20),()]([0mt f f +-=δ (2.2.3) 从(2.2.3)说明单分量LFM 信号的Ville Wigner -分布是沿直线mt f f +=0分布的冲激线谱,即分布的幅值集中出现在表示信号的瞬时频率变化率的直线上,因此,从最佳展现LFM 信号的频率调制率这一意义上讲Ville Wigner -分布具有理想的时频聚集性。
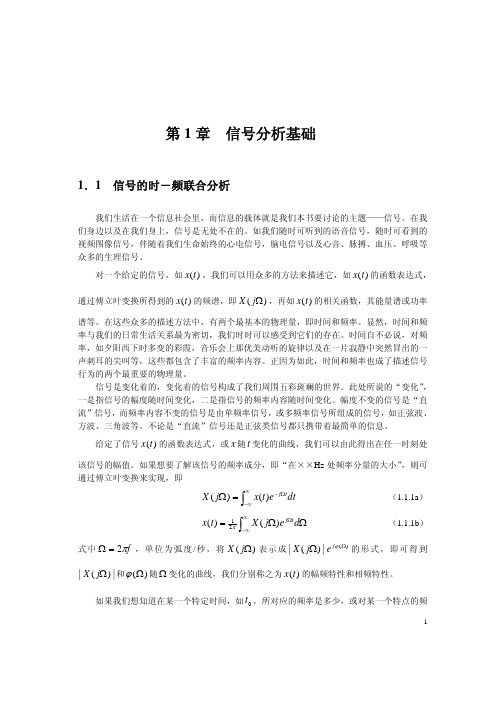
在实际中由于LFM 信号的长度有限,其Ville Wigner -分布往往显示为背鳍状如图2.2.1所示,能够看出信号的能量集中于瞬时频率附近。
图2.2.1 实际LFM 信号的Ville Wigner -分布呈背鳍状 若所研究的LFM 信号是多分量的,那么信号各分量之间的交叉项就会使时-频平面变得模糊不清,尤其是在信噪比不高的情况下,甚至难于区分各个LFM 信号分量。
现代信号处理_2012-03
2 1
M
)且 零衰减模拟频率点, 即 i c tg( i / 2) c tg(Fi / Fs ,
12 10
由图可见,椭圆滤波器比其他滤波器更陡,因此在选 择滤波器的时候,椭圆滤波器能够以较低的阶数获得 较窄的过渡带宽,但是它在通带和阻带上都有波动
现代信号处理 25
0.1 Ap max
N lg(k12 ) / lg(q )
p、r 分别为“预畸”后低通滤波器的通带边界频率和 阻带边界频率,p r c2
现代信号处理 27 现代信号处理 28
7
互补滤波器设计与实现
互补滤波器设计与实现
(1)奇阶互补滤波器设计
互补关系 当N为奇数,且满足以下关系式
2
现代信号处理 29 现代信号处理 30
互补滤波器设计与实现
高、低通互补对
H L ( s ) H L ( s ) 1 1
•设计
互补滤波器设计与实现
零点分离和分配原则
•设计
12
2 M s 2 i s2 2 2 k1 i 1 1 s i
1
•设计
奇阶互补滤波器设计 奇阶互补滤波器实现
一般奇阶互补滤波器的数字实现 奇阶镜象互补滤波器的数字实现
互补关系式及其推广
k1
1 或 (100.1 Ap 1)(100.1 Ar 1) 1
则模拟椭圆低通滤波器(1)与其对应的高通 滤波器 H H (s) H L (1 / s) 构成一对互补滤波器
k 1 K k 1
K
k
) )
H i ( z ) h(i ) h(i M ) z h(i 2M ) z
现代数字信号处理
无线信道的估计、均衡与信道分配
4/5G移动通信中的多用户检测和智能天线 软件无线电技术
加密、认证
网络信号处理
4.3 信号处理发展趋势
随机信号 处理
统计信号 处理
确定性信号处理 Deterministic Signal processing
Statistical SP
技术分类
统 计 过 程 分 析
3.2 主要方法 (2/4)
基于模型的方法 信号产生过程的参数模型 分析: 线性预测 参数谱估计 滤波: 最优线性滤波器 维纳滤波器,卡尔曼滤波器 自适应滤波器
3.3 主要方法 (3/4)
统计信号处理方法 信号统计模型 贝叶斯估计 分析: 参数估计 隐马尔科夫模型 滤波: MAP, ML, LS
现代信号处理
教材事项
教材:
① 《现代数字信号处理》 姚天任等编,华中科技大学出 版社 ② 《现代数字信号处理》王炳和 西安电子科技大学出版 社 参考书: ①张贤达,现代信号处理,北京:清华大学出版社, 2002年10月。 ②Mitra,数字信号处理,北京:清华大学出版社, 2001年9月(影印版)。 ③胡广书,现代信号处理教程,北京:清华大学出版社, 2004年11月。 ④皇甫堪等,现代数字信号处理,北京:电子工业出版 社,2004年6月。
4.1 信号处理与现代通信
新的信号处理方法:
高阶统计量方法 盲信号处理方法 小波变换 神经网络信号处理方法 量子信号处理方法
4.2 信号处理与现代通信
信号处理在现代通信中的应用: 接入网的宽带化-ADSL
CDMA 语音、图像和视频信息的压缩与传输,分发,转码
现代信号处理方法2-1

第二章 Radon-Wignel 变换2.1 Radon 变换Radon 变换是Radon J .于1917年提出的,随着快速Fourier 变换广泛应用和改进,Radon 变换已成为医学成像和其它许多遥感成像等的主要工具而受到广泛重视,诸如医学上的X 射线层析成像(CT )就是Radon 变换的应用之一。
1962年,Hough P .又从图形特征检测角度提出了Hough 变换。
由于以直线图形为特征的Radon 变换与Hough 变换相当,所以在有些文献里,把Radon 变换与Hough 变换视为等同概念。
Radon 变换是一种直线积分的投影变换。
如图2.1.1所示,将原直角坐标旋转α角得到新的直角坐标),(v u ,这时以不同的u 值平行于v 轴积分,所得的结果即为Radon 变换。
由图2.1.1可以看出,实际上Radon 变换相当于广义的边缘积分,也相当于一种投影积分(对u 积分投影)。
为在一般意义上讨论Radon 变换,设二维平面),(ωt 有一任意的二维函数(如非平稳信号的时-频分布)),(ωt f ,则其Radon 变换可写成⎰=线PQ dv t f u P ),()(ωα (2.1.1) 利用三角运算,可以得出),(ωt 与),(v u 两平面坐标之间的关系为: ⎩⎨⎧+=-=ααωααcos sin sin cos v u v u t (2.1.2)将(2.1.2)代入(2.1.1)得⎰+-=线PQ dv v u v u f u P )cos sin ,sin cos ()(ααααα (2.1.3) 由(2.1.3)可以看出Radon 变换)(u P α是关于α和u 的二维函数,通常用符号),(αu P f 表图2.1.1 Radon变换的几何关系 ωf示),(ωt f 的Radon 变换。
若用ℜ表示Radon 变换算子,则(2.1.3)可换写成 ⎰+-==ℜ线PQ f dv v u v u f u P t f )cos sin ,sin cos (),()],([αααααω ''''''')()cos sin ,sin cos (⎰⎰∞∞-∞∞--+-=dv du u u v u v u f δαααα (2.1.4)而Hough 变换是一种特征检测方法,它可以将平面(可以推广为空间)里符合某种特征的图形映射为另一个二维平面上的一个点。
现代信号处理02
第二章噪声中信号波形的检测假设检验理论-------->信号波形的检测输入的是信号加噪声,此任务就是按某一准则来设计最佳检测器或称为最佳接收机。
这种最佳检测器常常用匹配滤波器来构造。
故匹配滤波器的概念是很重要的。
通信中许多接收机都可以,用此模型来表示。
滤波器可实现滤波、平滑和预测等信息处理的基本任务。
如果滤波器的输出是滤波器输入的线性函数,则称为线性滤波器;否则为非线性滤波器。
若滤波器的冲激响应是无限长,称为无限冲激响应滤波器,反之,为有限冲激响应滤波器。
如果滤波器是在时间域、频率域或空间域实现,则分别称为时域、频域、空间域滤波器。
简单地说,滤波器就是信号抽取器,它的作用是从被噪声污染的信号中抽取出原来的信号,因此,信号的提取必须满足一定的优化准则,对于连续时间滤波器有两种最优化设计准则。
一种准则是:使滤波器的输出到达最大的信噪比,称为匹配滤波器;另一种是使输出滤波器的均方估计误差为最小,称为Wiener滤波器。
§2-1匹配滤波器在波形检测中,经常用匹配滤波器来构造最佳检测器,匹配滤波器理论在信号检测理论中占有独特的重要地位。
在通信系统中,许多常用的接收机,均可简化成由一个线性滤波器和一个判决电路两部分组成,如下图所示线性滤波器的作用是对接收机的信号进行某种方式的加工处理,使之增加正确的判决概率。
而判决电路一般为一个非线性装置,最简单的判决电路就是一个门限电路。
为了增大信号相对于噪声的强度,以利于判决,要求线性滤波器是最优的。
若输入信号已知,且线性时不变滤波器的输入为加性平稳噪声(白噪声),此时,输出信噪比为最大的滤波器,就是一个与输入信号相匹配的最佳滤波器――匹配滤波器。
())12()(.----=⎰∞∞--dt et h H tj ωω())22()(21.----=⎰∞∞-dt eH t h tj ωωπ滤波器输入为:Z (t )=s (t )+n (t )-----(2-3)其中s (t )是有用的已知信号,n (t )-零均值平稳噪声.利用叠加原理可以分别计算出s 0(t ), n 0(t ) .若输入信号的傅氏变换存在())42()(.----=⎰∞∞--dt et s S tj ωω())52()()(21.0----=⎰∞∞-dt e S H t s tj ωωωπ若s 0(t )在t 0处出现峰值,即:())62()()(210.00----=⎰∞∞-dt e S H t s t j ωωωπ输入噪声n (t ) 的功率谱密度为P n (ω) 输出噪声n 0(t )的功率谱密度为P n 0(ω)()())72()(20----=ωωωn n P H P滤波器输出噪声的平均功率为:())82()()(21)(21][202----==⎰⎰∞∞-∞∞-ωωωπωωπd P H d P t n E n n 定义:输出信噪比=输出信号峰值功率/输出噪声平均功率[])92()()(21)()(21)()(222002000-⎭⎬⎫⎩⎨⎧==⎰⎰∞∞-∞∞-ωωωπωωωπωd P H d e S H t n E t S SNR n tj要使此式达到最大值,可利用Schwarz 不等式⎰⎰⎰∞∞∞∞∞∞-∙≤---)102..()()(*)()(*)()(*2dx x x dx x F x F dx x x F θθθF (x ),θ(x )为两个复函数,*-共轭且当θ(x )=αF (x ), α为任意常数时,上式中等号成立。
现代信号处理-胡广书-清华
X ( jΩ)
=
1 2π
<
x(t), e jΩt
>
式中 < x, y > 表示信号 x 和 y 的内积。若 x , y 都是连续的,则
(1.1.5)
< x, y >= ∫ x(t) y*(t)dt
若 x , y 均是离散的,则
< x, y >= ∑ x(n) y*(n)
从时域波形还是从频域波形,我们都很难看出该信号的调制类型及其他特点。和图 1.1.1(c)
一样,图 1.1.2(c)也是 x(n) 的时-频分布表示,由该图可明显看出,该信号的频率与时间成
Line ar sca le
Real part
S ignal in time 1
0
-1 |S TF T|2, Lh=48 , Nf=1 92, lin. scale, co ntour, Thld =5%
gt,Ω (τ ) = g(t − τ )e jΩτ
(1.1.8)
来代替傅立叶变换中的基函数 e jΩt ,则
< x(τ ), gt,Ω (τ ) >=< x(τ ), g(t −τ )e jΩτ >
∫= x(τ )g*(t − τ )e− jΩτ dτ = STFTx (t, Ω)
(1.1.9)
该式称为 x(t) 的短时傅立叶变换(Short Time Fourier Transform, STFT)。式中 g(τ ) 是一窗函
愈多。但由傅立叶变换 X ( jΩ) 看不出在什么时刻发生了此种类型的突变。现举两个例子说
明这一概念。 例 1.1.1 设信号 x(n)由三个不同频率的正弦所组成,即
现代信号处理教程 - 胡广书(清华)-推荐下载
81 为了看清图3.3.4中交叉项的行为,我们将该图作了旋转,因此,水平方向为频率,垂直方向为时间。
图3.3.3 例3.3.3的WVD 图3.3.4 例3.3.4的WVD例3.3.5 令 ()2142t x t e ααπ-⎛⎫= ⎪⎝⎭(3.3.5)可求出其WVD 为 ()22,2exp[]x W t t ααΩ=--Ω(3.3.6)这是一个二维的高斯函数,,且是恒正的,如图3.3.5所示。
()Ω,t W x 由该图可以看出,该高斯信号的WVD 的中心在处,峰值为2。
参数控()()0,0,=Ωt α制了WVD 在时间和频率方向上的扩展。
越大,在时域扩展越小,而在频域扩展越大,反α之亦然。
其WVD 的等高线为一椭圆。
当WVD 由峰值降到时,该椭圆的面积。
1-e π=A 它反映了时-频平面上的分辨率。
如果令 ,,则的谱图()2142t h t e ααπ-⎛⎫=⎪⎝⎭()2142t x t eββπ-⎛⎫= ⎪⎝⎭()t x ()⎥⎦⎤⎢⎣⎡Ω+-+-+=Ω2221exp 2,βαβααββααβt t STFT x82(3.3.7)图3.3.5 例3.3.5的WVD,(a )高斯信号,(b )高斯信号的WVD它也是时-频平面上的高斯函数。
当其峰值降到时,椭圆面积。
这一结果说明,1-e π2=A WVD 比STFT 有着更好的时-频分辨率。
如果令 ()()tj et t x t x 001Ω-=(3.3.8)式中是(3.3.5)式的高斯函数。
是的时移加调制,其WVD 是:()t x ()t x 1()t x (3.3.9)()12200,2exp[()()/]x W t t t ααΩ=---Ω-Ω它将(3.3.6)式的由移至处。
其WVD 图形请读者()Ω,t W x ()()0,0,=Ωt ()()00,,Ω=Ωt t 自己画出。
83例3.3.6令 ()2201422j tt j t z t ee e αβαπΩ-⎛⎫=⎪⎝⎭(3.3.10)它是由(3.3.5)式的与()t x ()202j t j t y t Aee βΩ=(3.3.11)相乘而得到的(在(3.3.9)式中,A=1)。
现代信号处理教程 - 胡广书(清华)
203⎥⎦⎤⎢⎣⎡---=----)()()()(~01011010z H z z H z z H z H N N m Η (7.6.4b)利用(7.4.9b )的关系,有I ΗΗ210012~=⎥⎦⎤⎢⎣⎡=m m(7.6.5)这样,由(7.6.3)式,CQMFB 的分析滤波器组可以构成仿酉矩阵,其对应的系统也是仿酉系统。
由(7.6.4a )及(7.4.1)式有)1(2det ---=N m z Η(7.6.6)将这一结果代入(7.2.12)式,并令式中的k =0,则⎥⎦⎤⎢⎣⎡-----=--)()()()(0101)1(z H z H z H z H zN m G⎥⎦⎤⎢⎣⎡------=--------)()()()(2010)1(010)1()1(z H z H zz H z H z zN N N (7.6.7) 将(7.6.4a)及(7.6.7)代入(7.2.10)式,有X ΗG X T m m 21ˆ=X ⎥⎦⎤⎢⎣⎡---⎥⎦⎤⎢⎣⎡------=--------------)()()()()()()()(10)1(10)1(00010)1(010)1()1(z H z z H z z H z H z H z H zz H z H z zN N N N N X ⎥⎦⎤⎢⎣⎡-=--10012)1(2N z(7.6.8) 因此,实现了对X 的准确重建。
上面的结论说明,仿酉的调制矩阵m Η直接引出了对)(n x 的准确重建系统,也即CQMFB 。
由(7.6.7)式,可导出0G ,1G 和0H 的关系,即(7.4.2)式。
由上面的讨论可以看出,仿酉滤波器组总是包含了功率互补的关系。
需要指出的是,仿酉系统等效CQMFB ,可以实现准确重建。
但可实现准确重建的系统却并不一定是仿酉的。
现在利用上述讨论的结果来给出仿酉系统的多相表示形式。
记204)()()(20112000z E z z E z H -+= (7.6.9a ) )()()(21112101z E z z E z H -+=(7.6.9b ) )()()(20120010z R z R z z G +=- (7.6.9c ) )()()(21121011z R z R z z G +=-(7.6.9d )式中)(ij ij R E 的下标i 代表0H ,1H 的序号,j 代表多相结构的序号。
现代信号处理教程-胡广书(清华)
现代信号处理教程-胡广书(清华)jtt2g t, g,ed qt2q(4.4.2)式中g t,由(4.3.7)式定义。
由(4.3.8)和(4.3.9)及上式结果,有Cx t,21jxu2xu2qt u2qt u2dued,则上式变成令u2,u2Cx t,1j x x qt qt ed d21j jx qt ed x qt ed(4.4.3)221Xq2于是结论得证。
式中Xq是x t乘上窗函数q t后的傅立叶变换。
该式说明,如果g,是某一函数的模糊函数,那么用此g,所得到的Cx t,等效于谱图。
因此,谱图也是Cohen类成员。
2.P1,实值性,即Cxt,R,t,,Q1:g,g,证明:由(4.1.1)式,t,Cx12j t u xu2xu2g,ed du d 令,,则上式变为t,Cx12j t uxu2xu2g,ed dud显然,如要求t,Cx t,,必有g,g,Cx3、时移:P2:若s t x t t0,则Cs t,Cx t t0,Q2: g,不决定于t证明:因为g 4、频移:,处于,域,和t无关,所以它不影响分布的时移性质;若sP3:t x t ej t,则Cs t,Cx t,0Q3:g,与无关性质P2与P3称为Cohen类时-频分布的“移不变”性质,它包含了时移和频移。
5、时间边缘条件,即12Ct,d xtP4:x2Q4:g,0 1证明:将(4.1.1)式两边对积分,有Cx t,d12j t uxu2xu2g,edud d dx u2x u2g,e j t u dud d x u g,0e j t u dud2欲使上式的积分等于x t,必有欲使该式成立,必有j(t u)g(,0)ed2(t u)01,也就是说,为保证C t,具有WVD的边界性质,g,xg,在轴上始终为1。
6、频率边缘条件,即P5: Q5:Cx t,dt Xg0, 12其证明请读者自己完成。
112前已述及,为了有限的抑制AF中远离,0,0的互项,希望g,应为,平面上的2-D低通函数。
[现代信号处理(第二版)].张贤达.扫描版(2)
信号的频谱分析式研究信号特性的重要手段之一,对于确定信号,可以用Fourier变换来考察信号的频谱特性,而对于广义平稳随机信号而言,相应的方法是求其功率谱。
功率谱反映了随机信号功率能量的分布特征,可以揭示信号中隐含的周期性以及靠的很近的谱峰等有用信息,有很广泛的应用。
在雷达信号处理中,回波信号的功率提供了运动目标的位置、强度和速度等信息(即功率谱的峰值与宽度、高度、和位置的关系);在无源声纳信号处理中,功率谱密度的位置给出了鱼雷的方向(方位角)信息;在生物医学工程中,功率谱的峰和波形,表示了一些特殊疾病的发作周期;在语音处理中,谱分析用来探测语音语调共振;在电子战中,还利用功率谱来对目标进行分类。
功率谱密度函数反映了随机信号各频率成份的功率分布情况,是随机信号处理中应用很广泛的技术。
实际应用中的平稳信号通常是有限长的,因此,只能从有限的信号中去估计信号的真实功率谱,这就是功率谱估计问题。
寻找可靠与质量优良的估计谱是这次研究的主要内容。
功率谱估计可分为非参数化方法(低分辨率分析),参数化方法(高分辨率分析),广义的功率谱分析(空间谱分析),也可以把非参数化方法称为经典谱估计,参数化方法称为现代谱估计(包括空间谱估计)这次论文从不同角度介绍了现代谱估计的一些主要算法,包括参数模型法、Pisarenko 谐波分解法、最大熵估计、多重信号分类(MUSIC)、旋转不变技术(ESPRIT)等。
参数模型法将以ARMA模型为主,以及其谱估计所需的AR、MA的参数和阶数;最大熵估计也就是Burg最大熵谱估计,它在不同约束条件下,分别与AR谱估计、ARMA谱估计等价;MUSIC 方法是一种估计信号空间参数的现代谱估计方法;ESPRIT方法是一种估计信号空间参数的旋转不变技术,其基本思想是将谐波频率的估计转变为矩阵束的广义特征值分解。
最后,这次论文还会分析它们各自的优缺点及应用场合。
并利用计算机语言对各种现代谱估计算法的进行仿真实现,并比较它们的性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Linear scale
Energy spectral density
0.4
Frequency [Hz]
167 84 0
0.3
0.2
0.1
0
20
40
60 80 Time [s]
100
120
10
例5
设 x(t ) 由两个时频“原子”构成, 一个时间中心 t1 50 处,时宽是32,另一个时间中心在 t2 90 处时宽也是32,调制信号的归一化频率都是0.25 。 选择 g ( )为Hanning窗
2.5 临界抽样情况下连续信号 Gabor展开系数的计算
x(t )
m n
C
m n
m ,n m ,n
h
(t )
j 2 mbt C h ( t na ) e m,n
如何 计算
选择一母函数 g (t ) ,移位加调制:
gm,n (t ) g (t na)e
用 g (t ) 的对偶函数 h(t ) 来表示
1 x( ) 2
区别
STFTx (t , )h ( t )e j dtd
15
* g ( t ) h (t )dt 1
2.3 离散信号的短时傅立叶变换
STFTx (m, ) x( n) g * ( n mN )e j n
Signal in time
Real part
0.5 0 -0.5 |STFT| , Lh=63, Nf=64, lin. scale, contour, Thld=5%
2
Linear scale
Energy spectral density
0.4
Frequency [Hz]
0.3
0.2
0.1
168
j 2 mbt
t
h(t a) exp( j 2 mbt )
展开的基函数
18
t
移位+调制
1.如何选择 a 和b? 2.如何选择母函数 h(t ) 3.如何求Cm,n?
4. 是否任一能量有限信
号都可作 Gabor 分解? 5. 时-频平面离散栅格上的 任一个二维函数是否都唯一 地对应一个一 维 的 信 号 ?
若
y (t ) x (t t0 ) , 则
jt0
STFTy (t , ) STFTx (t t0 , )e
S y ( t , ) S x ( t t 0 , )
13
2.2 短时傅立叶反变换
短时傅里叶反变换有不同的表示形式:
取反变换 1 左边= STFTx (t , )e j d 2 1 j ( ) 右边 x ( ) g ( t ) e d d 2
欠抽样将引起信息的丢失,因此很少被研究;
20
Gabor最早提出:
使用高斯窗 取临界抽样
x(t )
临界抽样最简单;
m n
C
m,n m,n
h (t )
原因
高斯窗满足不定原理的下限; 高斯窗的傅里叶变换仍然是高斯的。
但是,由于展开系数计算的困难,Gabor展开长 期没有被重视; 从1946年~1980年,人们也不断地 提出一些计算的方法,但都不理想。直到 Bastians 于1980年提出了用“对偶”函数计算Gabor系数的方 法,这一问题才初步的被解决。 当时,考虑的是 21 ab 1 的临界情况
let t
STFTx (t , ) x( ) g ( t )e j d
1 jt x(t ) STFT ( t , ) e d x 2 g (0)
x( ) g ( t ) ( )d x( ) g ( t )
x (t ) L ( R ) 其STFT定义为:
2
STFTx (t , ) x( ) gt*, ( )d x( ), gt , ( )
式中
gt , ( ) g ( t )e j
|| g ( ) || 1
窗函数应取 对称函数。
d
2
STFTx (t , ) x( ) g ( t )e
第2章 短时傅立叶变换与 Gabor变换
2.1 2.2 2.3 2.4 连续信号的短时傅立叶变换 短时傅立叶反变换 离散信号的短时傅立叶变换 Gabor变换的基本概念
2.5 临界抽样时连续信号展开系数的计算 2.6 过抽样情况下连续信号展开系数的计算
1
2.1 连续信号的短时傅立叶变换
(Short Time Fourier Transform,STFT) 概念:
100
120
4091 2045
0
0
20
40
60 80 Time [s]
100
120
窗函数的宽度为55
窗函数的宽度为13
11
概念:
“谱图(spectrogram)”
2
STFTx (t , )
x( ) g ( t )e
j
d S x (t , )
2
谱图是恒正的,且是实的。
Signal in time 1
Signal in time 1
Real part
Real part
0.5 0 -0.5 |STFT| , Lh=27, Nf=64, lin. scale, contour, Thld=5%
2
0.5 0 -0.5 |STFT| , Lh=6, Nf=64, lin. scale, contour, Thld=5%
所以:
STFTx (t , ) e
jt
1 2
X ( )G * ( )e jt d
STFT的频域表达式 对 x( ) 在时域加窗 g ( t )
对 X (v) 在频域加窗 G (v )
等效
有了时-频定位功能,下面再关心其时-频分辨率。
5
时—频分辨率
时间中心 0 由 g ( ) 的中心位置所决定 ,即
jl
时间中心在 k 处 频率中心在 l处
t
v 分辨“细胞”为
tk 分辨“细胞”和
Ω2 Ω1
Gt , (v) Gt , (v)
v
gt , ( )
v
l 无关,即不
论 t k 和 l 处
在何处,分辨细
gt , ( )
胞的形状都保持 不变。这是STFT 的特点。 7
t1
t2
例1
令 x ( ) ( 0 ) ,可以求出其
STFTx (t , ) ( 0 ) g ( t )e g ( 0 t )e
j 0 j
d
该例说明,STFT的时间分辨率由窗函数 g ( ) 的 宽度而决定。
例2
若 x ( ) e
j 0
,则
j0
STFTx (t , ) e
g ( t )e j d
G ( 0 )e j ( 0 )t
STFT的频率分辨率由 g ( ) 频谱的宽度来决定。8
例3
若 g ( ) 1 ,则 , G () () STFTx (t , ) X () 这时,STFT减为简单的FT,这将给不出任何的时间 定位信息。其实,由于 g ( ) 为无限宽的矩形窗,故 等于没有对信号作截短。 高斯Chirp调制信号
j
在时域也是有限支撑的;
j e 由于 在频域是线谱,所以STFT的基函数
gt , ( ) g ( t )e j Gt , (v)
的频谱的形状取决于 G (v) ,接近于有限支撑的。 而频率中心由 e j 来决定, 这样,利用STFT可实 现对 x(t ) 时-频定位的功能。
2
Linear scale
Linear scale
Energy spectral density
Energy spectral density
0.4
0.4
Frequency [Hz]
Frequency [Hz]
0.3
0.3
0.2
0.2
0.1
0.1
4091 2045
0
0
20
40
60 80 Time [s]
14 STFT的一维反变换表示
STFT的二维反变换来表示 :
STFTx (t , ) x( ) g ( t )e j d
1 x( ) 2
STFTx (t , ) g ( t )e
j
dtd
1 jt x(t ) STFT ( t , ) e d x 2 g (0)
b
a
a
na
:栅格的时间长度
t
b
:栅格的频率长度
17
x(t )
m n
C
m,n m,n
h (t )
h(t )
Cm,n
Gabor展开系数;
h(t )
h(t a)
h(t na)
0
a
h(t a) exp( j 2 bt )
na
t
母函数
hm ,n (t ) h (t na )e
t1 , t2 , , tn
频率中心 v0由G(v)的中心决定,即
1 , 2 , , n
时宽:2 带宽:
2
1 2
2
| g ( ) | d
2
与时移 t 无关