无人驾驶车实验实训系统技术参数
无人驾驶系统与智能车辆应用技术实训教程

传感器类型与原理
01
介绍常用于智能车辆的传感器类型,如激光雷达、毫米波雷达
、摄像头等,并分析其工作原理。
数据融合与处理
02
探讨多传感器数据融合技术,提高感知系统的准确性和鲁棒性
。
环境感知与识别
03
研究如何利用传感器数据实现车辆周围环境的感知与识别,包
括障碍物检测、车道线识别、交通信号识别等。
导航与定位技术
农业无人机
利用无人机进行植保、施肥、播种等作业,降低 人力成本,提高作业效率和质量。
农业机器人
研发具备自主导航、智能识别和精准执行能力的 农业机器人,实现农业生产的自动化和智能化。
07
CATALOGUE
未来发展趋势预测与挑战应对
技术创新方向探讨
传感器技术
随着传感器技术的不断创新,无人驾驶系 统将更加精准地感知周围环境,提高行驶
控制系统
包括车辆控制器、执行器等,用 于控制车辆的加速、减速、转向 等动作。
通信模块
如车载以太网、CAN总线等,用 于实现车内各系统间的通信。
传感器集成与调试方法
传感器安装与校准
根据车辆结构和应用场景,合理 布置传感器,并进行校准以确保
测量精度。
数据同步与融合
通过时间戳等方式实现多传感器数 据的同步,采用滤波、插值等方法 进行数据融合,提高感知准确性。
解决方案制定
根据问题诊断结果,制定相应的解决 方案和改进措施。
方案实施与验证
将解决方案落实到具体的改进措施中 ,并进行实施和验证。
经验分享与总结
将问题诊断和解决方案的经验进行总 结和分享,促进团队学习和进步。
06
CATALOGUE
行业应用案例分析
智能交通实训系统配置
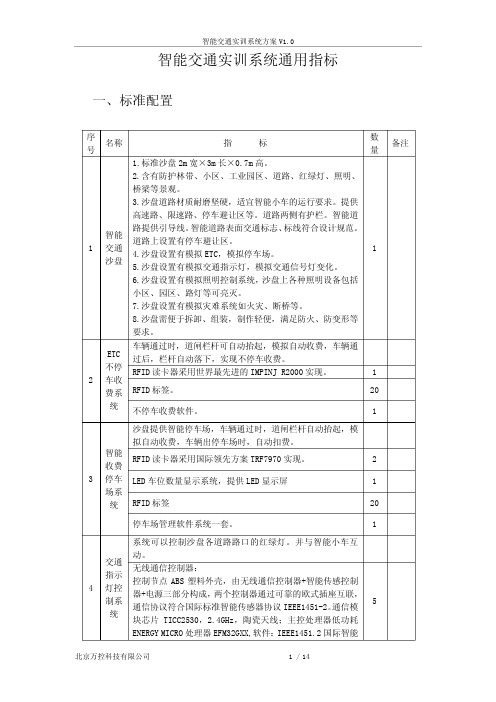
智能交通实训系统通用指标 一、标准配置序号 名称 指 标数量备注1 智能交通沙盘1.标准沙盘2m宽×3m长×0.7m高。
2.含有防护林带、小区、工业园区、道路、红绿灯、照明、桥梁等景观。
3.沙盘道路材质耐磨坚硬,适宜智能小车的运行要求。
提供高速路、限速路、停车避让区等。
道路两侧有护栏。
智能道路提供引导线。
智能道路表面交通标志、标线符合设计规范。
道路上设置有停车避让区。
4.沙盘设置有模拟ETC,模拟停车场。
5.沙盘设置有模拟交通指示灯,模拟交通信号灯变化。
6.沙盘设置有模拟照明控制系统,沙盘上各种照明设备包括小区、园区、路灯等可亮灭。
7.沙盘设置有模拟灾难系统如火灾、断桥等。
8.沙盘需便于拆卸、组装,制作轻便,满足防火、防变形等要求。
12ETC不停车收费系统车辆通过时,道闸栏杆可自动抬起,模拟自动收费,车辆通过后,栏杆自动落下,实现不停车收费。
RFID读卡器采用世界最先进的IMPINJ R2000实现。
1RFID标签。
20 不停车收费软件。
13 智能收费停车场系统沙盘提供智能停车场,车辆通过时,道闸栏杆自动抬起,模拟自动收费,车辆出停车场时,自动扣费。
RFID读卡器采用国际领先方案TRF7970实现。
2LED车位数量显示系统,提供LED显示屏 1RFID标签20 停车场管理软件系统一套。
14 交通指示灯控制系统系统可以控制沙盘各道路路口的红绿灯。
并与智能小车互动。
无线通信控制器:控制节点ABS塑料外壳,由无线通信控制器+智能传感控制器+电源三部分构成,两个控制器通过可靠的欧式插座互联,通信协议符合国际标准智能传感器协议IEEE1451-2。
通信模块芯片TICC2530,2.4GHz,陶瓷天线;主控处理器低功耗ENERGY MICRO处理器EFM32GXX,软件:IEEE1451.2国际智能5传感协议,协议栈:符合ZigBee2007或ZigBeePRO规范,套件提供的样例程序实现了无线通信节点的动态组网及传感数据采集传输。
无人驾驶技术实训报告总结

随着科技的飞速发展,无人驾驶技术作为一项颠覆性的创新,正逐渐走进我们的生活。
为了深入了解无人驾驶技术的原理和应用,我参加了为期一个月的无人驾驶技术实训。
以下是我对实训过程的总结和体会。
一、实训背景本次实训旨在通过理论学习和实践操作,使学员掌握无人驾驶技术的基本原理、系统架构、关键技术以及应用场景。
实训课程内容包括:传感器技术、感知与定位、决策与规划、控制与执行、仿真与测试等。
二、实训过程1. 理论学习实训的第一阶段是理论学习,主要介绍了无人驾驶技术的基本概念、发展历程、技术路线和国内外研究现状。
通过学习,我对无人驾驶技术的全貌有了初步的认识,了解了其涉及的关键技术和应用领域。
2. 传感器技术实训的第二阶段是传感器技术,重点学习了激光雷达、摄像头、毫米波雷达等传感器的工作原理、性能指标和数据处理方法。
通过实验,我们掌握了传感器标定、数据融合和特征提取等关键技术。
3. 感知与定位实训的第三阶段是感知与定位,主要学习了无人驾驶车辆的感知系统、定位系统以及地图构建技术。
通过实验,我们掌握了激光雷达点云处理、摄像头图像处理和GPS/IMU融合等技术。
4. 决策与规划实训的第四阶段是决策与规划,主要学习了无人驾驶车辆的决策算法、路径规划和行为规划等关键技术。
通过实验,我们掌握了基于规则和基于模型的方法,实现了车辆的自主行驶。
5. 控制与执行实训的第五阶段是控制与执行,主要学习了无人驾驶车辆的动力学模型、控制策略和执行机构。
通过实验,我们掌握了PID控制、模糊控制和模型预测控制等控制方法,并实现了车辆的平稳行驶。
6. 仿真与测试实训的最后阶段是仿真与测试,我们利用仿真软件对无人驾驶车辆进行测试,验证了所学的理论知识和技术。
通过实验,我们掌握了仿真环境搭建、测试用例设计、测试结果分析等技能。
三、实训体会1. 理论与实践相结合实训过程中,我们不仅学习了理论知识,还通过实践操作加深了对技术的理解。
这种理论与实践相结合的学习方式,使我们能够更好地掌握无人驾驶技术。
无人驾驶车辆技术实验报告
无人驾驶车辆技术实验报告随着科技的迅速发展,无人驾驶车辆技术成为了当今汽车行业的热门话题。
无人驾驶车辆技术的实验报告成为了评估其安全性、可靠性和实用性的重要依据。
本实验报告旨在对无人驾驶车辆技术进行全面评估,并提供有益的建议和改进建议。
一、技术原理无人驾驶车辆技术是基于人工智能和自动驾驶技术的结合,通过传感器、摄像头、雷达和激光雷达等设备,实现车辆在不需要人类操作的情况下自主行驶。
该技术利用先进的算法和模型,识别道路标志、识别障碍物、做出驾驶决策,并实现车辆的自主导航。
二、实验设备本次实验中使用的无人驾驶车辆配备了高精度的传感器、摄像头和激光雷达设备,以确保车辆能够准确获取周围环境的信息,并做出正确的驾驶决策。
此外,车辆还配备了先进的人工智能系统,能够实现自主行驶和智能导航。
三、实验过程在实验过程中,我们对无人驾驶车辆进行了各种道路和环境的测试。
在城市道路、高速公路、复杂路况和恶劣天气下,无人驾驶车辆均表现出色,能够稳定行驶、识别障碍物,并及时做出避让和变道等操作。
在密集车流和复杂交通情况下,无人驾驶车辆也能够灵活应对,确保安全驾驶。
四、实验结果通过本次实验,我们得出结论:无人驾驶车辆技术已经达到了相当成熟的水平,能够满足日常交通需求,并在一定程度上提高了交通安全性和行车效率。
然而,仍存在一些问题需要解决,比如系统容错性不足、对特殊情况的应变能力有待提高等。
五、建议和改进建议为了进一步提高无人驾驶车辆技术的实用性和可靠性,我们提出以下建议和改进建议:一是加强系统的容错性,提高车辆对特殊情况的适应能力;二是加强对人工智能算法的优化和更新,确保车辆能够更准确地识别和判断道路情况;三是加强人机交互系统的设计,优化用户体验,提高乘客的安全感和舒适度。
综上所述,无人驾驶车辆技术的实验报告对该技术的发展和应用具有重要意义。
通过不断的实验和改进,相信无人驾驶车辆技术将更好地服务于人类出行需求,为未来交通带来更多便利和安全。
实验报告无人驾驶汽车的自动导航算法实验验证

实验报告无人驾驶汽车的自动导航算法实验验证实验报告:无人驾驶汽车的自动导航算法实验验证1.引言在现代科技的快速发展下,无人驾驶汽车成为了一个备受关注的研究领域。
自动导航算法作为无人驾驶汽车的核心技术之一,其准确性和可靠性对于实现安全高效的自动驾驶至关重要。
为了验证自动导航算法的有效性,我们进行了一系列的实验。
2.实验设计2.1 实验目标本实验旨在验证无人驾驶汽车自动导航算法在真实道路环境中的可靠性和精确性。
2.2 实验设备我们使用了一辆配备了先进传感器和计算设备的无人驾驶汽车作为实验设备,该车辆能够接收来自激光雷达、相机和GPS等多种传感器的数据。
2.3 实验流程a) 数据采集:使用无人驾驶汽车在真实道路环境中行驶,并记录传感器采集的数据,包括路面情况、车辆姿态、周围环境等。
b) 算法处理:将采集到的数据输入到自动导航算法中进行处理,生成车辆的自动导航路线。
c) 实验验证:将算法生成的导航路线与实际道路情况进行对比,验证算法的准确性和可靠性。
3.数据采集在实验中,我们选择了城市道路、乡村道路和高速公路等不同路况进行数据采集。
通过在多种场景中的采集,我们能够更全面地评估自动导航算法的性能。
为了确保数据的准确性和可靠性,我们在数据采集过程中进行了多次重复实验,并对每次实验的数据进行了严格的质量检查。
4.算法处理实验中,我们使用了一种基于深度学习的自动导航算法。
该算法通过对传感器数据进行实时处理和分析,能够实现对车辆行驶方向、车道线以及前方障碍物等的准确识别和判断。
算法的核心是神经网络模型,通过对大量实验数据的训练和学习,使得算法能够对不同环境下的道路情况做出准确的预测和判断。
5.实验验证在实际道路环境中,我们将算法生成的导航路线与实际道路情况进行对比验证。
具体方法是通过与传感器采集的数据进行比对,评估算法对车辆行驶方向、车道线和障碍物等的判断准确性。
实验结果表明,自动导航算法在大部分场景下都能取得非常准确的导航效果。
无人驾驶应用实训报告

无人驾驶应用实训报告1. 介绍本报告是关于无人驾驶应用实训的实际操作和训练结果的总结。
2. 实训背景无人驾驶是当前科技领域的热门话题之一。
通过无人驾驶技术,车辆可以自主感知环境并自动驾驶,无需人类驾驶员的操作,具有广阔的应用前景。
为了提高自己在无人驾驶领域的技术水平,我们决定参加无人驾驶应用实训。
该实训旨在通过实际操作来了解无人驾驶的基本原理,并培养我们在该领域的实际应用能力。
3. 实训内容3.1 硬件环境搭建:我们首先根据指导材料搭建了完整的无人驾驶实验平台。
该平台包括车辆底盘、传感器、计算机等。
3.2 软件环境配置:在硬件环境搭建完成后,我们进行了软件环境的配置。
我们安装了无人驾驶应用相关的软件,并进行了相应的设置和调试。
3.3 感知与决策算法实现:通过对传感器数据的获取和分析,我们掌握了无人驾驶车辆的感知能力。
基于感知结果,我们还实现了无人驾驶车辆的决策算法,使其能够根据道路情况做出相应的驾驶决策。
3.4 实际驾驶操作:在上述工作完成后,我们进行了实际的无人驾驶操作。
我们通过对车辆的远程操作,使其能够在指定的路段上实现自动驾驶。
4. 实训成果通过本次实训,我们取得了以下成果:4.1 熟悉了无人驾驶应用的基本原理,了解了其在感知、决策和行动三个方面的工作原理。
4.2 掌握了无人驾驶应用的实际操作方法,包括硬件环境搭建、软件环境配置和感知与决策算法的实现。
4.3 实现了无人驾驶车辆的自动驾驶功能,并对其进行了相应的调试和优化。
4.4 增加了对无人驾驶应用的实际应用能力,提高了自己在该领域的技术水平。
5. 总结与展望通过本次无人驾驶应用实训,我们深入了解了无人驾驶技术的应用和发展趋势。
我们认识到无人驾驶技术的重要性和潜力,未来无人驾驶有望在交通、物流、城市规划等领域产生革命性的影响。
同时,我们也发现无人驾驶技术在实际应用中仍存在一些挑战,如感知准确性、决策智能化等方面。
我们希望通过进一步的研究和实践,能够更加深入地理解和应用无人驾驶技术,为其发展贡献自己的力量。
无人驾驶实习报告

一、实习背景随着科技的飞速发展,无人驾驶技术逐渐成为汽车行业的热点。
我国政府也高度重视无人驾驶技术的发展,将其列为战略性新兴产业。
为了更好地了解无人驾驶技术,我选择在一家知名汽车公司进行为期三个月的实习。
二、实习目的1. 深入了解无人驾驶技术的基本原理和发展现状;2. 掌握无人驾驶系统的主要组成部分及工作原理;3. 学习无人驾驶技术的研发流程和测试方法;4. 提高自己的实践能力和团队协作能力。
三、实习内容1. 无人驾驶技术概述在实习期间,我首先了解了无人驾驶技术的发展历程、定义、分类及研究意义。
无人驾驶技术是指汽车在无需人类驾驶员操控的情况下,通过感知环境、决策规划、控制执行等环节实现自主行驶的技术。
目前,无人驾驶技术主要分为四个级别:L0-L4。
2. 无人驾驶系统组成无人驾驶系统主要由感知、决策、控制三个部分组成。
(1)感知:通过激光雷达、摄像头、毫米波雷达等传感器获取周围环境信息,实现对车辆周围物体的检测、识别和跟踪。
(2)决策:根据感知到的环境信息,结合车辆行驶状态和预设目标,进行路径规划、障碍物规避、速度控制等决策。
(3)控制:根据决策结果,实现对车辆制动、转向、加速等控制指令的输出,使车辆按照预定轨迹行驶。
3. 无人驾驶技术研发流程无人驾驶技术研发流程主要包括以下几个阶段:(1)需求分析:确定无人驾驶系统的功能、性能、安全等需求。
(2)系统设计:根据需求分析结果,设计无人驾驶系统的架构、模块及接口。
(3)算法开发:针对感知、决策、控制等环节,开发相应的算法和模型。
(4)系统集成:将各个模块集成到一起,实现无人驾驶系统的整体功能。
(5)测试验证:对无人驾驶系统进行功能测试、性能测试、安全测试等,确保系统稳定可靠。
4. 无人驾驶系统测试方法无人驾驶系统测试方法主要包括以下几个方面:(1)仿真测试:在虚拟环境中对无人驾驶系统进行测试,评估其性能和可靠性。
(2)封闭场地测试:在封闭场地内进行实车测试,验证无人驾驶系统的实际性能。
智能无人小车实训报告总结
一、实训背景随着科技的不断发展,人工智能、物联网、机器人技术等新兴领域逐渐成为研究的热点。
为了提高我国在智能无人小车领域的研究水平,培养具备实际操作能力的人才,我们开展了一项关于智能无人小车的实训活动。
本次实训旨在让学生了解智能无人小车的原理、设计、实现和应用,培养学生的创新能力和实践能力。
二、实训目标1. 掌握智能无人小车的原理和关键技术;2. 学会使用相关硬件设备和软件工具;3. 能够独立设计和实现智能无人小车;4. 提高学生的团队协作能力和沟通能力。
三、实训内容1. 智能无人小车原理及关键技术学习在实训初期,我们重点学习了智能无人小车的原理和关键技术,包括传感器技术、控制技术、导航技术等。
通过学习,学生了解了智能无人小车的工作原理、组成结构以及各个模块的功能。
2. 硬件设备与软件工具的使用实训过程中,我们让学生熟悉了智能无人小车所需的硬件设备,如传感器、控制器、电机驱动器等,并掌握了相关软件工具的使用,如Keil、Proteus等。
3. 智能无人小车的设计与实现在实训中期,学生分组进行智能无人小车的设计与实现。
每个小组根据要求,完成以下任务:(1)选择合适的传感器和控制器;(2)设计智能无人小车的电路图和PCB板;(3)编写控制程序,实现小车的基本功能;(4)进行测试和调试,确保小车性能稳定。
4. 团队协作与沟通能力的培养在实训过程中,学生需要与团队成员紧密合作,共同完成任务。
通过讨论、分工、协作,学生提高了团队协作能力和沟通能力。
四、实训成果1. 设计并实现了具备基本功能的智能无人小车;2. 学会了使用相关硬件设备和软件工具;3. 提高了学生的创新能力和实践能力;4. 培养了学生的团队协作能力和沟通能力。
五、实训总结与反思1. 实训过程中,学生遇到了许多问题和挑战,如电路设计不合理、程序编写错误等。
通过团队协作和老师的指导,学生逐渐克服了这些困难,提高了自己的问题解决能力。
2. 实训过程中,学生学会了如何将理论知识应用于实际项目,提高了自己的实际操作能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无人驾驶车实验实训系统技术参数
1.车辆结构组成:
★1. 车辆采取独立电机驱动形式,可灵活配置成可设定前驱、后驱、四驱、独立四驱等各种控制模式;
★2. 车辆配置主动转向系统,转向电机的扭矩、转角的精确控制,方便实现主动转向控制和智能车相关控制实验;
★3. 系统包含差分GPS、惯性导航设备、激光雷达、毫米波雷达、摄像头等硬件设备。
4. 感知系统与底层控制系统能够在硬件上方便连接,软件上兼容,可实现数据自由交互及扩展程序的开放接口;
5. 配备适合放置快速控制原型和GPS、雷达等传感器的安装支架;
6. 配备急停开关,电机可回馈制动并配独立的液压制动确保实验安全;
7. 配备电脑测试用支架,方便实验员实时观察数据;
8. 加装5V直流,12V直流,220V交流电源接口;
9. 动力电池采用全新原装电芯,容量120Ah以上,满足至少100Km的续航里程,带BMS 系统及车载充电机。
2.性能指标:
★1. 单个电机额定功率至少10kW(整车额定功率40kw),峰值功率单轮至少15kW(整车峰值功率最少60kw);
★2. 能够实时提供车辆位置信息、道路信息以及障碍物等信息。
★3. 能够实现车辆自动定位、速度跟踪、以及轨迹跟踪、车道保持及自动避撞等功能。
4. 差分GPS及惯性导航系统:定位精度达到亚米级,定向精度不小于0.5度,采样更新频率不小于20Hz,航向精度不小于1°,分辨率不小于0.01°,测量范围为俯仰± 90°,输出频率50Hz ;
5. 采用velodyne公司VLP-16或与其同类的激光雷达:测量距离100m,测量角度270°,角度分辨率0.25° (360°/1,440 steps,扫描时间25msec/scan;
6. 毫米波雷达:测量距离不小于80m,更新率50msec,距离精度不小于0.5m;
7. 前向双目摄像头:探测距离100m,识别距离50m,辨认距离30m,垂直运行监视范围广,视角度±80°,图像尺寸: 1920×1080,支持红外。
8. 四个车轮均安装主动式轮速传感器;
9. 安装前轮转向角传感器,可实现精确测量前轮转角和转速;
10. 悬架处安装线位移传感器,记录悬架行程;
11. 带有防滚架,满足侧翻实验的安全需要;
3. 功能要求:
★1. 智能车运动控制、
★2. 操纵稳定性控制、
3. 直接横摆力矩控制、
4. 防侧翻控制、
5. 车辆参数估计、
6. 地面附着系数估计、
7. 车辆状态估计、
8. 速度控制、
9. 驱动防滑控制、
10. 前轮差动转向控制、
11. 前轮差动转向轨迹跟踪控制、
12. 过驱动车辆能量优化控制。
4. 质量保证:
1. 供货期90天之内;
2. 保修期至少1年;
3. 提供软件培训服务至少两次。