S2-非线性离散系统
实验五非线性系统(一)

实验五非线性系统(一)一、实验要求了解和掌握非线性系统的原理,学会用相轨迹分析非线性系统的瞬间响应和稳态误差。
二、实验原理相平面图表征系统在某个初始条件下的运动过程,相轨迹可用图解法求得,也可用实验法直接求得。
当改变阶跃信号的幅值,即改变系统的初始条件时,便获得一系列相轨迹。
根据相轨迹的形状和位置就能分析系统的瞬态响应和稳态误差。
R(S) "E(S)S(0.5S 1)(1)继电型非线性原理方块图如图2-5 —1所示,图2-5-2是它的模拟电路图。
图2—5—2继电型非线性系统工程模拟电路图2 —5—1所示非线性系统工程用下述方法表示:TC C - KM =0(e 0)TC C KM =0(e ::0)(5-1)式中T为时间常数(T=0.5), K为线性部分开环增益(K = 1), M为稳压管压值。
采用e和e 为相平面座标,以及考虑e 二r -ce - -c (5-2)r=R.1(t)(5 -3)则式(5—1)变为:(5-4)Te e KM = 0(e 0)Te e - KM 二 0(e ::: 0)代入T =0.5,K =1以及所选用稳压值 M ,应用等倾线法作出当初始条件为e(0) =r(0) _c(0) =r(0) =R时的相轨迹,改变r(0)值就可以得到一簇相轨迹。
图5-1所示系统的相轨迹曲线如图 5-3所示图2 — 5- 3图2 — 5 — 1所示系统相轨迹图2 - 5 - 3中的纵坐标轴将相平面分成两个区域, (■.和I ) e 轴是两组本轨迹的分界线,系统在阶跃信号下,在区域「内,例如在初始点 A 开始相轨迹运动到分界线上的点B ,从B 点开始在趋于11内,沿区域 「内的本轨迹运动到点 C 再进入区域〔,经过几次往返运 动,若是理想继电特性,则系统逐渐收敛于原点。
(2)带速度负反馈的继电型非线性系统原理方块图如图2-5-4所示。
图2- 5- 2中的虚线用导线连接,则图 2 - 5-2就是图2 - 5-4的模拟电路。
第七章非线性系统
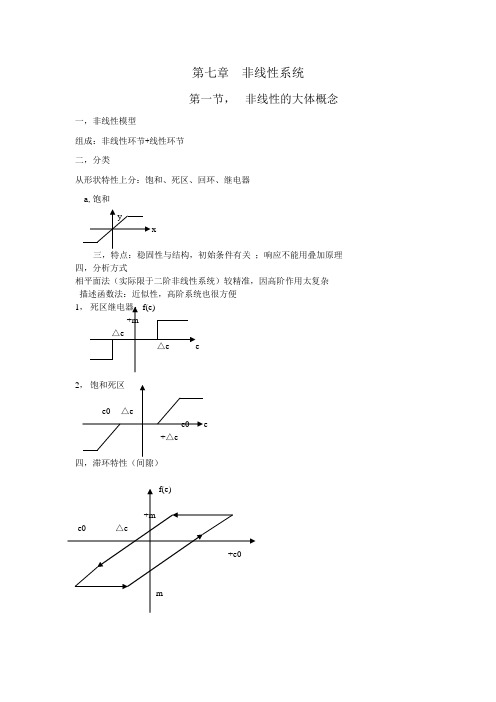
第七章非线性系统第一节,非线性的大体概念一,非线性模型组成:非线性环节+线性环节二,分类从形状特性上分:饱和、死区、回环、继电器a,饱和x三,特点:稳固性与结构,初始条件有关;响应不能用叠加原理四,分析方式相平面法(实际限于二阶非线性系统)较精准,因高阶作用太复杂描述函数法:近似性,高阶系统也很方便1,2四,滞环特性(间隙)7—2 二阶线性和非线性系统相平面法分析一、相平面法大体概念要完全地描述二阶的系统时域行为,至少要用两个变量(状态变量)。
可选x(t) 和)(t x作为状态变量。
1. 相平面:以横坐标表示X ,以纵坐标x组成一个直角坐标系, 2. 相轨迹:相平面上的点随时刻转变刻画出来的曲线称为相轨迹。
3. 相平面图:相平面和想轨迹曲线簇组成相平面图。
4. 想平面法:用相图表示非线性二阶系统进程的方式成相平面法,5. 相平面发局限性在于只适用在定常系统,系统输入只适限于阶跃和斜坡。
举例:例8—1 某弹簧——质量运动系统。
m —质量,k —弹性系数解:描述系统运动的微分方程为:直接微分法。
方程x ∙∙+x=0 可写成 x ∙dx ∙/dx=--x分离变量x ∙dx=--xdx 代入初始条件∫x ∙dx ∙=--∫xdx即 x+x=Xo 与上法结果相同。
分析:等幅振荡特性能够用相轨迹表征 ,相轨迹为闭合曲线。
一. 奇点1. 概念:相轨迹方程dx`/dx 为不定值的点dy/dx=0/04.奇点类型1) 稳固核心(-1<ζ<0) 相轨迹从原点向外发散,自由运动不收敛平稳点,是周期性增幅振荡二. 极限环分类相平面上孤点的闭和曲线称为极限环,与初始条件无关. 极限环表示对应于时域中有确信振幅和频率的振荡,极限环包括 稳固极限环 不稳固极限环 半稳固极限环稳固极限环:极限环外部和内部起始的相轨迹都渐进趋向于那个极限环,任何较小的扰动使系统离开极限环后,最后回到环上。
不稳固极限环、半稳固极限环不能产生自振荡,环内相轨迹发散、极限环外相轨迹收拢极限环7—3非线性系统的相平面分析第一依照非线性特性的分段情形,用几条分界限将相 划分为几个现行区域1) 然后依照系统的结构图别离列写各区域的线性微分方程式2) 并应用线性系统相平面分析的方式和结论,绘出各区域的相轨迹3) 依照系统状态转变的持续性,在各区域的交壤限上,将响轨迹彼此衔接成持续曲线,即组成完整的线性系统相图实奇点:每一个区域内有一个奇点,若是那个奇点在本区域之内,这种奇点称实奇点 虚奇点:若是奇点落在本区域之外,称虚奇点说明该区域相轨迹不可能聚集于虚奇点. 二阶非线性系统中,只可能有一个实奇点,而与那个实奇点所在区域邻接的所有其它区域都可能有虚奇点操纵系统分析例: 饱和特性的非线性操纵系统,用相平面法分析系统的阶跃响应和斜坡响应解:系统线性部份c(s)/x(s)=s+1) ``+c`\ e=r-c非线性部份:10e |e|<1x= 10 e>1-10 e<-1阶跃响应r=Rx1(t),当t>0+时r``(t)=r`(t), r=R e`=-c`, e``=-c``描述系统误差的方程为``+e`+=0x=10e |e|<=1x=10 e>1x=-10 e>1即为方程线性方程,在相平面上,e=+-1的两条直线把相平面划分为三个区域,1) 关于1区,系统线性微分方程为``+e`+=0de`/de=-e` 相轨迹方程。
江苏大学非线性系统报告

非线性系统理论报告学院:电气信息工程学院专业:学号:姓名:1变结构控制系统的基本概念通常人们所说的变结构控制,是指滑动模态变结构控制。
在定常滑滑动模态变结构控制方面发展比较成熟,内容也非常丰富,其研究方法和成果常被滑模变结构控制系统采用。
变结构控制方法通过控制作用首先使系统的状态轨迹运动到适当选取的切换流形,然后沿次流形运动到平衡点[4]。
系统一旦进入滑动模运动,在一定条件下就对外界干扰及参数扰动具有不变性[4]。
以下从滑动超平面、控制率及控制品质等方面,简单介绍滑模变结构控制的基本概念。
设某二阶控制系统为x x u u x ζϕ-=⎫⎬=-⎭&&& (1.1) 其中,ζ大于零。
设计切换逻辑如下式所示:22,0,,0024s gx x a xs a xs g a ϕζζλ=+⎧>⎧⎪=⎨⎨-<<<-=-++⎩⎪⎩& (1.2) 当a ϕ=-时,1λ、2λ即为系统的正、负实根,且12λλ>;当a ϕ=时,系统极点只有两个带正实部的复根,其闭环控制系统为:0x x x ζϕ-+=&&& (1.3)这种组合系统是渐进稳定的,系统的状态轨迹如下图所示:图2.3二阶变结构系统的滑动模态xx&0s gx x =+=&分析以上二阶系统的情况,组合系统是由不同结构的反馈控制系统按一定逻辑切换变化得到的,并且具备了原来各反馈控制系统并不具备的渐进稳定性[3]。
我们称之为变结构系统(VSS)或变结构控制系统(VSCS)。
从上述二阶可知系统可知,变结构控制中所指的“变结构”从本质上说是指系统的内部反馈控制结构,即其包括反馈极性和系数在内的进行的不连续的非线性变换。
这种非线性变换必须遵循设计者根据系统的性能要求设计的一套切换逻辑。
相应于每一种不同的反馈结构,系统所反映出来的一种结构及特性被称为子系统。
这些不同结构和特性的子系统按照设计者制定的切换逻辑进行有机的组合。
第7章非线性系统
system。
例 7-1-2 范德波尔方程是
••
x(t)
2
1
x2
(t
)x(•t)
x(t
)
0
0
或
••
x(t
)
2
x
2
(t)
1
•
x(t)
x(t
)
0
0
现分析其响应的特征。
(2)相平面法 (phase plane analysis) 用相平面图研究非线性系统的动态特性(dynamic character) ,
只适用于二阶系统.
(3)李雅普诺夫第二方法(直接法)(Lyapunov second method) 用李雅普诺夫函数V(x)来研究, 但V(x)难确定.
7-2 二阶线性和非线性系统的 相平面分析
通常情况下,可以将构成系统的环节分为线性与 非线性两部分。用框图表示如图7-1-2所示。
图7-1-2 非线性系统框图的基本形式
式(7-1-1)描述的系统,也可以用图7-1-3所示的 框图表示。
图7-1-3 质量、弹簧、阻尼系统的框图
当用框图作为非线性系统的数学模型时,只需将 系统的线性部分用传递函数或脉冲响应表示,非 线性部分用非线性等效增益或描述函数表示。
Chapter 7 Nonlinear Control system
7-1 The Basic notion of Nonlinear Control System 7-2 Phase Plane analysis of second order linear system and nonlinear system
现代控制原理2-3离散系统
−T −T
−T
)
−T
z 2 − (1 + e −T ) z + e −T
)
0 x( k + 1) = −T -e
0 x ( k ) + u( k ) −T 1+ e 1 1
y( k ) = 1 − e −T − Te − T
T − 1 + e −T x( k )
x(k+1) = [I +TA]x(k) + TBu(k) G = I +TA H =TB
17
0 1 0 & 的近似离散化方程。 例2-13 求 x = x + 1 u 的近似离散化方程。 0 −2
解: G = I + TA = 1 0 + 0 − T = 1 − T 0 1 0 − 2T 0 1 − 2T
x( k + 1) = G ( k ) x( k ) + H ( k )u( k ) y( k ) = C ( k ) x ( k ) + D( k )u( k )
2
2.结构图 2.结构图
3
3.差分方程和脉冲传递函数与离散状态空间表 3.差分方程和脉冲传递函数与离散状态空间表 达式之间的转换 在单变量离散系统中, 在单变量离散系统中,数学模型分为差分方程 和脉冲传递函数两类, 和脉冲传递函数两类,它们与离散状态空间表达式 之间的变换,和连续系统分析相类似。 之间的变换,和连续系统分析相类似。 离散 差分方程 连续 D.E
x1 ( k ) y ( k ) = [1 −4 ] + u( k ) x2 ( k )
基于非线性控制器设计的离散混沌系统同步方法
基于非线性控制器设计的离散混沌系统同步方法周双;谢绍斌;万康【摘要】在混沌通信系统工程化过程中, 要求实时信号接收处理, 实现收发两端系统的快速同步. 为解决该问题, 提出了以非线性控制器设计为基础的快速同步方案. 针对离散混沌系统, 采用Lyapunov函数同步法判定准则和反馈同步原理, 合理设计了响应系统中的非线性控制器. 仿真结果表明, 同步误差可快速地稳定于零点, 验证了该快速同步方法的正确性和有效性.%In chaotic communication engineering , signals are required to be received and processed in real-time, thus the need for fast synchronization .A fast synchronization scheme based on nonlinear controller design is put forward .The nonlinear controller in response system is designed for discrete chaotic systems by adopting the Lya -punov function method and feedback synchronization principle .The simulation results show that synchronization error can quickly stabilize to near zero , verifying the correctness and effectiveness of the fast synchronization method .【期刊名称】《电子科技》【年(卷),期】2016(029)001【总页数】3页(P65-67)【关键词】Lyapunov函数法;离散混沌系统;非线性控制器;快速同步【作者】周双;谢绍斌;万康【作者单位】空军工程大学信息与导航学院,陕西西安 710077;空军工程大学信息与导航学院,陕西西安 710077;空军工程大学信息与导航学院,陕西西安 710077【正文语种】中文【中图分类】TN918AbstractIn chaotic communication engineering,signals are required to be received and processed in real-time,thus the need for fast synchronization.A fast synchronization scheme based on nonlinear controller design is put forward.The nonlinear controlle r in response system is designed for discrete chaotic systems by adopting t he Lyapunov function method and feedback synchronization principle.The simulation results show that synchronization error can quickly stabilize to n ear zero,verifying the correctness and effectiveness of the fast synchronizat ion method.KeywordsLyapunov function method;discrete chaotic system;nonlinear controller des ign;fast synchronization自从1990年Pecora和Carrol发现了混沌的同步性,提出PC同步法,并且采用电路实现之后[1-2],混沌保密通信已成为信息安全领域的研究热点。
系统的离散滑模面公式(二)

系统的离散滑模面公式(二)系统的离散滑模面公式离散滑模面法是一种针对非线性系统的控制方法,通过引入离散滑模面来实现对系统的稳定控制。
本文将介绍离散滑模面的定义、离散滑模面公式的推导以及一个具体的应用示例。
1. 离散滑模面的定义离散滑模面是指在离散时间域内,通过对系统状态进行变换而形成的一个具有特定性质的曲面。
离散滑模面通常具有以下特点: - 具有有界性:滑模面在系统状态变化时,保持在一个有限的范围内。
- 具有切换性:滑模面在系统状态发生突变时,可以快速地改变自身位置。
- 具有连续性:滑模面在系统状态改变时,可以保持连续性。
2. 离散滑模面的公式推导离散滑模面通常可以通过离散滑模控制器来实现,其中离散滑模控制器的输入为系统状态、输出为控制指令。
下面是一种常见的离散滑模面公式:s(k+1) = s(k) + h*f(s(k))公式中的变量含义如下: - s(k):滑模面在第k时刻的位置。
- h:离散时间步长。
- f(s(k)):滑模面的变换函数,与系统状态相关。
3. 离散滑模面公式的应用示例考虑一个非线性系统,其状态方程为x(k+1) = x(k)^2 +u(k),其中x(k)为系统状态,u(k)为控制输入。
我们可以使用离散滑模面控制来实现对该系统的稳定控制。
首先,我们需要选择一个合适的滑模面函数f(s(k))。
在这个例子中,我们选择f(s(k)) = s(k)^2。
然后,将离散滑模面公式代入系统状态方程中,可得:s(k+1) = s(k) + h*f(s(k))= s(k) + h*s(k)^2通过迭代上述公式,可以得到滑模面在每个时刻的位置。
接下来,我们可以根据滑模面的位置来设计控制指令u(k),从而实现对系统的稳定控制。
总结: - 离散滑模面是一种用于非线性系统的控制方法。
- 离散滑模面公式可以通过对系统状态进行变换来实现。
- 离散滑模面公式的应用示例可通过选择合适的滑模面函数来实现对系统的稳定控制。
离散系统分析方法

离散系统分析方法一、采样定理镜像作用,采样频率max 2ωω>s 二、①开环脉冲传递函数()()()()()()()()368.01264.0368.01111111111121210--+=⎥⎦⎤⎢⎣⎡-+----=⎥⎦⎤⎢⎣⎡++-Z ⋅-=⎥⎦⎤⎢⎣⎡+⋅-Z =----z z z K T e z z z z z Tz z K s s s z K s s K se z G T Ts闭环()()()()z G z G z R z Y ry 001+==φ,特征方程 ()()()0368.0264.0368.1368.00120=++-+=+K z K z z G 即。
②判断稳定性:用双线性变换11-+=ωωz ,将其代入特征方程中,再用劳斯判据。
如果K 给定,则直接解特征方程,若|z|<1则稳定,若|z|>1则不稳定。
③()()[]s G z G Z =0,对参考输入有:()()()()()()()()()()()()()()><-=Φ=⋅==-=⋅=⋅=-=+=⋅==→-→-→→定理此时必须且唯有用终值有干扰时,时,当时,当时,当z E z e z z N z E K T c e ct t r z G zK K T b e t b t r z G z K K a e t a t r z G K z ssn en ass z a vss z v pss z p 1lim ,21,1lim ,1lim 11,lim 122021101101④求()()()()()[]()()[]z R z z Y t y z R z z Y ry ry φφ11*,--Z =Z =⋅=时,可以用两种方法: a )部分分式法;b )长除方法⑤z 变换公式:()()()()()()()()()()()()()()()()323222111211111111-+===-===-=+==-===--z z z z T z X ss X t t x z Tzz X s s X t t x e z zz X a s s X e t x z z X ss X t t x atat 如:()()()⎥⎦⎤⎢⎣⎡++⋅-Z =-3210s s Ks e s G Ts()()......133********⋅-=⎥⎦⎤⎢⎣⎡+++-+Z ⋅-=--K z s s sK z σ 非线性系统分析方法注:1为sinwt ;2为基波和高次谐波经过G (s )后剩下的基波。