一种结合sobel算子和小波变换的图像边缘检测方法
sobel边缘检测算法参数
Sobel边缘检测算法是一种离散微分算子,主要用于边缘检测。
该算法结合了高斯平滑和微分操作,因此具有强大的抗噪声能力。
在具体应用中,Sobel算子包括两组3*3的矩阵,左边的用于检测垂直边缘,右边的用于检测水平边缘。
在使用Sobel算子进行边缘检测时,可以设置不同的参数来控制算法的灵敏度。
主要的参数包括:
1. 图像深度(ddepth):指输入图像的深度。
2. 求导阶数(dx, dy):0表示这个方向上没有求导,取值为0、1。
3. Sobel算子的大小(ksize):即卷积核的大小,必须为奇数如1、3、5、7,默认为3。
如果ksize = -1,则使用3*3的Scharr算子。
4. 缩放导数的比例常数(scale):默认情况为没有伸缩系数。
5. 图像边界的模式(borderType):默认cv2.BORDER_DEFAULT。
图像处理中的边缘检测算法应用方法

图像处理中的边缘检测算法应用方法边缘检测是图像处理中一个关键的步骤,旨在识别图像中不同区域之间的边缘和轮廓。
边缘检测算法有多种,每种算法都有其独特的应用方法和适用场景。
本文将介绍常用的边缘检测算法以及它们在图像处理中的应用方法。
1. Robert算子Robert算子是一种最简单、最常见的边缘检测算法之一。
它通过在图像中滑动一个小型的2x2滤波器,计算出两个方向上的边缘梯度。
这个算子鲁棒性较弱,容易受到噪声的干扰,但是计算速度快,适用于实时图像处理和边缘检测。
在应用Robert算子进行边缘检测时,首先需要将图像转换为灰度图像,然后对每个像素点应用Robert算子模板。
在计算出梯度后,可以设置一个阈值来筛选出边缘区域。
通常情况下,边缘区域的灰度值变化较大,可以通过设定阈值来滤除那些灰度值变化较小的区域,从而得到较为准确的边缘检测结果。
2. Sobel算子Sobel算子是一种常用的边缘检测算法,也是一种基于梯度的算法。
它将图像分解为水平和垂直两个方向上的梯度,并将两个梯度组合起来形成最终的边缘结果。
Sobel算子相对于Robert算子而言,提供了更好的边缘检测效果和更强的鲁棒性。
使用Sobel算子进行边缘检测时,与Robert算子相似,需要将图像转换为灰度图像。
然后,使用水平和垂直两个方向上的Sobel算子模板对图像进行卷积运算,得到每个像素点的水平和垂直梯度。
将两个梯度合并后,可以通过设定阈值来筛选出边缘区域。
3. Canny算子Canny算子是一种广泛应用的边缘检测算法,被认为是一种较为优秀的边缘检测方法。
它基于多级阈值和非极大值抑制技术,能够检测出图像中的细微边缘,并且对噪声具有较好的抑制能力。
使用Canny算子进行边缘检测的过程较为复杂。
首先,同样需要将图像转换为灰度图像,并使用高斯滤波对图像进行平滑处理,以减少噪声干扰。
然后,计算图像的梯度幅值和方向,并进行非极大值抑制,剔除非边缘区域。
最后,利用多级阈值和连接操作,筛选出梯度幅值高于设定阈值的像素,形成最终的边缘检测结果。
基于小波变换的图像边缘检测算法讲解

基于小波变换的图像边缘检测算法仿真实现学生姓名:XX指导教师:xxx专业班级:电子信息学号:00000000000学院:计算机与信息工程学院二〇一五年五月二十日摘要数字图像边缘检测是图像分割、目标区域识别和区域形态提取等图像分析领域中十分重要的基础,是图像识别中提取图像特征一个重要方法。
目前在边缘检测领域已经提出许多算法,但是提出的相关理论和算法仍然存在很多不足之处,在某些情况下仍然无法很有效地检测出目标物的边缘。
由于小波变换在时域和频域都具有很好的局部化特征,并且具有多尺度特征,因此,利用多尺度小波进行边缘检测既能得到良好的抑制噪声的能力,又能够保持边缘的完备。
本文就是利用此方法在MATLAB环境下来对数字图像进行边缘的检测。
关键词:小波变换;多尺度;边缘检测AbstractThe boundary detection of digital image is not only the important foundation in the field of image segmentation and target area identification and area shape extraction, but also an important method which extract image feature in image recognition.Right now, there are a lot of algorithms in the field of edge detection, but these algorithms also have a lot of shotucuts, sometimes, they are not very effective to check the boundary of the digital image. Wavelet transform has a good localization characteristic in the time domain and frequency domain and multi-scale features, So, the boundary detection of digital image by using multi-scale wavelet can not only get a good ability to suppress noise, but also to maintain the completeness of the edge.This article is to use this method in the environment of MATLAB to detect the boundary of the digital image.Keywords: wavelet transform; multi-scale; boundary detection.目录摘要 .................................................................................................................................... I Abstract ................................................................................................................................. II 1 绪论 . (1)1.1 研究背景 (1)1.2 图像边缘检测概述 (2)1.3 边缘检测的现状 (2)2传统的边缘检测方法 (6)2.1 Roberts 算子 (6)2.2 Sobel 算子 (6)2.3 Prewitt 算子 (7)2.4 Kirsch 算子 (7)2.5 Laplace 算子 (8)2.6 LOG 算子 (8)2.7 Canny 算子 (9)2.8 算法实现和结果分析 (10)3基于小波变换的图像边缘检测 (13)3.1 小波变换基础理论 (13)3.1.1连续小波变换 (13)3.1.2二维小波变换 (13)3.1.3多分辨分析及双尺度方程 (14)3.2 选取小波基的一般原则 (15)3.3 小波变换算法实现 (16)4 在MATLAB环境下的算法仿真实现和结果分析 (17)4.1 MATLAB简介 (13)4.1.1 MATLAB软件简介 (13)4.1.2 MATLA的应用 (13)4.2 算法仿真实现和结果分析 (13)结论 (21)参考文献 (22)致谢 (23)附录 (24)1 绪论本章节重点阐述了图像边缘检测技术的探究状况与其历史,解释了基于小波变换的边缘检测技术的探究目的。
Sobel边缘检测算子
经典边缘检测算子比较一各种经典边缘检测算子原理简介图像的边缘对人的视觉具有重要的意义,一般而言,当人们看一个有边缘的物体时,首先感觉到的便是边缘。
灰度或结构等信息的突变处称为边缘。
边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。
需要指出的是,检测出的边缘并不等同于实际目标的真实边缘。
由于图像数据时二维的,而实际物体是三维的,从三维到二维的投影必然会造成信息的丢失,再加上成像过程中的光照不均和噪声等因素的影响,使得有边缘的地方不一定能被检测出来,而检测出的边缘也不一定代表实际边缘。
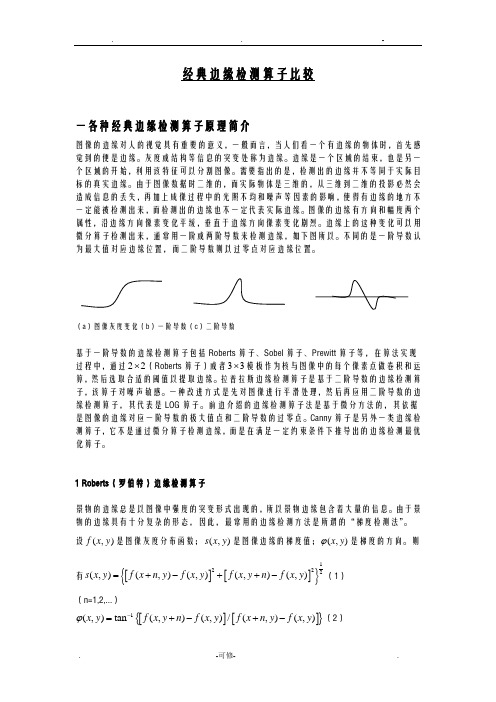
图像的边缘有方向和幅度两个属性,沿边缘方向像素变化平缓,垂直于边缘方向像素变化剧烈。
边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘,如下图所以。
不同的是一阶导数认为最大值对应边缘位置,而二阶导数则以过零点对应边缘位置。
(a )图像灰度变化(b )一阶导数(c )二阶导数基于一阶导数的边缘检测算子包括Roberts 算子、Sobel 算子、Prewitt 算子等,在算法实现过程中,通过22⨯(Roberts 算子)或者33⨯模板作为核与图像中的每个像素点做卷积和运算,然后选取合适的阈值以提取边缘。
拉普拉斯边缘检测算子是基于二阶导数的边缘检测算子,该算子对噪声敏感。
一种改进方式是先对图像进行平滑处理,然后再应用二阶导数的边缘检测算子,其代表是LOG 算子。
前边介绍的边缘检测算子法是基于微分方法的,其依据是图像的边缘对应一阶导数的极大值点和二阶导数的过零点。
Canny 算子是另外一类边缘检测算子,它不是通过微分算子检测边缘,而是在满足一定约束条件下推导出的边缘检测最优化算子。
1 Roberts (罗伯特)边缘检测算子景物的边缘总是以图像中强度的突变形式出现的,所以景物边缘包含着大量的信息。
由于景物的边缘具有十分复杂的形态,因此,最常用的边缘检测方法是所谓的“梯度检测法”。
设(,)f x y 是图像灰度分布函数;(,)s x y 是图像边缘的梯度值;(,)x y ϕ是梯度的方向。
小波变换和曲波变换的图像边缘检测新算法
小波变换和曲波变换的图像边缘检测新算法边缘包含着图像的许多信息,它也是图像最基本的特征。
目前,图像边缘检测是一个热门的研究问题,许多专家对其进行了研究,也取得了较理想的研究成果。
专家就图像边缘检测的问题提出了许多新的算法,其中就包括小波变换和曲波变换相结合的图像边缘检测新算法。
文章就边缘检测问题,探讨了小波变换和曲波变换的图像边缘检测新算法。
标签:小波变换;曲波变换;图像边缘检测;新算法前言图像的边缘包含着图像的许多信息,图像处理的主要内容即就对图像边缘的检测。
图像边缘的检测现在主要有微分边缘检测法,结合了神经网络、遗传算法、数学形态、模糊学等多个学科知识的边缘检测法这几种方法。
但是由于各种边缘检测法的技术局限性,因此所得出的边缘检测效果并不相同。
由于小波变换和曲波变换的图像边缘检测新算法具有良好的稳定性,因此这个边缘检测法引起了许多专家学者的重视,以此来满足这项算法在军事、医学、工业工程等领域内的应用。
文章首先介绍了边缘检测算法,其次介绍了小波变换和曲波变换的图像边缘检测新算法的基础理论,最后详细介绍了新的边缘检测算法基本思想、算法描述以及仿真实验的过程。
1 基础理论1.1 离散小波变换小波变换是根据傅里叶分析的基础上发展起来的一个数学分支,在图像处理、信号处理、地质勘探等许多领域内都起着非常重要的作用。
时间和频率之间进行了不断的进行变换,在这个变换过程中,小波变换通过伸缩、平移等多方面相结合的运算功能,对获得的信号或者函数进行了分析,并且从中提取到有用的信息。
小波变换可以通过选取合适的滤波器,适当的去掉信号与信号之间的相关性,根据需要对于信号做出处理,从而获得离散小波。
通过相应的参数的调节,就实现了离散小波的变换,这样小波变换实现了在时间和频率之间的作用。
1.2 离散曲波变换曲波变换同样具有一定的时间、频率的分析能力,它具有很好的辨别能力和很方向的选择能力,通过采用USFFT和WRAP方法,可以实现离散曲波变换,离散曲波变换,实现其在时间与频率之间的作用。
基于小波变换的数字图像边缘检测
基于小波变换的数字图像边缘检测数字图像边缘检测是计算机视觉领域中的一个重要问题,它在图像处理、模式识别和计算机视觉应用中有着广泛的应用。
边缘是图像中灰度值发生剧烈变化的地方,对于图像的分割和特征提取具有重要意义。
而小波变换作为一种多尺度分析工具,在数字图像边缘检测中发挥着重要作用。
小波变换是一种时频分析方法,它能够对信号在时间和频率上进行局部化分析。
对于数字图像,小波变换将图像分解为不同尺度的频域子带,每个子带都包含了图像在不同频率范围内的信息。
边缘是图像中高频分量的主要特征,因此小波变换能够提取图像中的边缘信息。
在基于小波变换的数字图像边缘检测中,首先需要对图像进行小波变换,将图像分解为多个尺度的频域子带。
然后,通过对每个子带进行阈值处理,将低频分量和高频分量分离开来。
高频分量中包含了图像中的边缘信息,因此可以通过对高频分量进行边缘检测来获取图像的边缘。
常用的小波函数有多种,如Haar小波、Daubechies小波和Morlet小波等。
不同的小波函数具有不同的频率特性和尺度特性,可以根据具体应用的需求选择合适的小波函数。
此外,还可以通过调整小波变换的尺度参数,来获取不同尺度下的边缘信息。
小波变换的边缘检测方法具有较好的性能和灵活性。
相比于传统的边缘检测方法,基于小波变换的边缘检测能够更好地提取图像中的边缘信息,并且能够对不同尺度下的边缘进行检测。
此外,小波变换还能够处理图像中的噪声,提高边缘检测的精度和稳定性。
综上所述,基于小波变换的数字图像边缘检测是一种有效的方法。
通过对图像进行小波变换,并对高频分量进行边缘检测,可以提取出图像中的边缘信息。
小波变换的边缘检测方法具有较好的性能和灵活性,可以广泛应用于图像处理、模式识别和计算机视觉等领域。
使用小波变换进行图像边缘检测的实用方法
使用小波变换进行图像边缘检测的实用方法图像边缘检测是计算机视觉和图像处理领域中的一个重要任务,它可以帮助我们理解图像的结构和形状。
小波变换是一种在信号处理中常用的工具,它具有多分辨率分析的能力,可以对图像进行细节和边缘的提取。
本文将介绍使用小波变换进行图像边缘检测的实用方法。
首先,我们需要了解小波变换的基本原理。
小波变换是一种将信号分解成不同频率的成分的方法。
它使用一组称为小波基函数的函数来表示信号,这些函数在时域和频域上都具有局部性质。
小波基函数具有时频局部化的特点,能够在时域和频域上同时提供较好的分辨率,因此适用于图像边缘检测。
在实际应用中,我们常用的小波变换方法是离散小波变换(DWT)。
离散小波变换将信号分解成不同频率的子带,每个子带都包含了信号在不同频率上的信息。
对于图像边缘检测,我们通常使用一维的小波变换方法对图像的每一行和每一列进行变换。
接下来,我们需要选择合适的小波基函数。
小波基函数的选择对于图像边缘检测的效果有很大的影响。
常用的小波基函数有Haar小波、Daubechies小波和Symlet小波等。
它们具有不同的性质,适用于不同类型的图像。
在选择小波基函数时,我们需要考虑图像的特点和需求,选择最适合的小波基函数。
然后,我们需要对图像进行小波变换。
在进行小波变换之前,我们需要将图像转换为灰度图像,并进行归一化处理。
然后,我们可以使用离散小波变换算法对图像进行变换。
变换后,我们得到了图像在不同频率上的子带系数。
这些子带系数可以表示图像的细节和边缘信息。
接下来,我们需要对小波变换后的图像进行边缘检测。
一种常用的方法是通过阈值处理来提取边缘信息。
我们可以设置一个阈值,将小于阈值的子带系数置为0,将大于阈值的子带系数保留。
这样,我们就可以得到一个二值图像,其中白色像素表示边缘,黑色像素表示背景。
然而,简单的阈值处理方法往往会导致边缘信息的丢失和噪声的引入。
为了提高边缘检测的准确性,我们可以使用基于小波变换的边缘检测算法,如Canny算子。
基于Sobel算子的数字图像边缘检测与FPGA实现
a d i t g a e n aFP n n e r t d i GA h p o i n p r a c i f l x S a t n3 XC3 5 5 X i S 0- PQ2 . e sm u a e e u ti d c t st a h r s n e GA 08Th i l t d r s l n i a e h t e p e e t d FP t c i h p XC3 5 - P S 0 5 Q2 8 c n r n a 3 M Hzs e d F n ly t e e p rm e t 0 a u t1 4 p e . i a l , h x e i n sd n o t n ma e o 0 4 X 1 2 i e s Th wa o e t e a i g f 1 2 0 4 p x l. e
级 . 大 大 增 加 了设 计 过 程 和 最 后 工 程 的 灵 活 性 。 这
S b l . 检 测 算 子 结 合 了边 缘 检 测 和 平滑 算 子 . 其 在 o e: 缘  ̄ 使 嘈杂 的环 境 下 有 良 好 的 检 测 能 力 。因此 本 文 选 择 S b l o e算子 应
一二 、 Biblioteka e边 缘 检 测 原 理 sbl
图 像 边 缘 是 图 像 的 基 本 特 征 之 一 , 包 含 对 人 类 视 觉 它
直 是 一 个 难 题 。虽 然 DSP 备 指 令 流 水 线 特 性 和 很 高 的 具
t he Edge D e ec i i t lI a nd is r alza i t ton ofD gia m ge a t e i ton by FPG A ec t hni que bas d e on be SO lope a o r tr
sobel边缘检测算法代码python
sobel边缘检测算法代码python Sobel边缘检测算法是一种常用的数字图像处理方法,用于在图像中检测出边界。
其原理是利用图像灰度值的变化来确定图像边缘的位置。
Sobel算法是一种简单而有效的边缘检测算法,可以在Python中快速实现。
Sobel算法的本质可以视为一种滤波器。
它使用一组水平和垂直的像素值累加器,将卷积运算应用于图像中的像素。
该算法对像素值的变化率进行计算,就可以检测出物体的边缘。
通常,Sobel算法用于物体边缘和轮廓的识别,通过滤波器之后,灰度值大的像素就会变得更加亮,而灰度值低的像素则会变得更加暗。
Python中Sobel算法的实现相对简单,以下是一个基本步骤:1.导入必要库:opencv-python, numpy``` import cv2 import numpy as np ```2.读取图像文件并转换成灰度图``` img = cv2.imread('path/to/image',cv2.IMREAD_GRAYSCALE) ```3.应用Sobel算子:可以应用两个权重矩阵,分别代表水平和垂直方向的边缘变化。
可以使用OpenCV的cv2.Sobel()函数来进行计算,其中参数1代表应用的输入图像,参数2代表深度,通常值为-1,参数3和参数4代表权重矩阵。
``` sobelHorizontal = cv2.Sobel(img,cv2.CV_64F, 1, 0) ``` ``` sobelVertical =cv2.Sobel(img, cv2.CV_64F, 0, 1) ```4.以合适的形式呈现边缘图像:边缘检测图像通常需要处理掉噪声,并调整颜色和对比度。
这一步骤有多种方式实现,例如使用cv2.convertScaleAbs()函数将数据类型转换为8位无符号整数,并将其转换为灰度格式的边缘图像。
``` magnitudeImage =cv2.convertScaleAbs(np.sqrt(np.power(sobelHorizonta l, 2) + np.power(sobelVertical, 2))) ```以上是一个基本的代码实现,可以生成一张带有高亮边缘的图像。
一种融合小波变换和数学形态学的图像边缘检测算法
Ab t a t s r c :Co i e i g t ia v nt ge n t r dii na m a dg t c i n m e ho , s h a m e g n e o nsd rn he d s d a a s i het a to li ge e e de e to t ds uc s e r e c f no s s e ge nd i c u a e e ge l c ton, t s p pe o s s a f i n e e d t c i n a g ihm a e he ie d s a na c r t d o a i hi a r pr po e uso dg e e to l ort b s d on t c m b n ton o a e e r ns o m t h a he a ia or ho o l ort m o s v he a o e pr blm s o i a i fw v l t ta f r wih t e m t m tc lm p l gy a g ih t ol e t b v o e .
一
种 融合 小 波 变换 和 数 学 形 态 学 的 图 像 边缘 检 测 算 法
胡 晓辉 , 张 晓颖 , 陈俊 莲
( 州 交 通 大 学 电子 与 信 息 工 程 学 院 , 肃 兰 州 7 0 7 ) 兰 甘 3 00
摘
要 :针 对 传 统 图像 边 缘 检 测方 法 中 出现 噪边 、 缘 定 位 不 精 确 等 缺 点 , 出一 种 融 合 小 波 变 换 和 数 学 形 态 学 边 提
An I a e Ed e De e to g r t m s d wih m g g t c i n Al o ih Fu e t W a e e a s o m n a he a i a or v l tTr n f r a d M t m tc lM pho o y lg
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一
种 结 合 sb l 子 和 小 波 变 换 的 图像 边缘 检 测 方 法 oe算
张宇伟 王耀明
( 上海师范大学数理信息学院 ( 上海 电机学院
蒋慧钧
上海 20 3 ) 0 24
上海 20 4 ) 0 20
摘
要
提 出了一种基于数据 融合 的边缘检测方 法。该方 法对 原始 图像 分别采 用 sbl oe 算子和基 于离散4 波变换 两种 方法提取 、
( h n h i aj U i rt,h n hi 02 0,hn ) S ag a n nv sy S g a 20 4 C ia Di i e i a
Ab ta t s r c A n w meh d fri g d e d t cin b s d o a a f so s p e e t d w ih d tcs t e e g fo g n li g i WT e to o ma e e g e e t a e n d t u in i r s n e . h c e e t h d e o r i a ma e w t D o i h
维普资讯
第2 4卷第 4期
20 0 7年 4月
计 算机 应 用与软 件
Co u e mp tr App iai n n o t r l t s a d S fwa e c o
Vo . 4 No 4 12 .
Ap . 0 7 r2 0
边缘 , 然后将 两种 方法的检 测结果进 行数据融合, 得到 一幅新 的边 缘图像 。实验证 明, 融合 后 的图像 边缘集合 了两种检测 方法 的优
点, 是一种有效的图像边 缘检测方法。 关键 词 离散小波变换 边缘检测 数据融合
EDGE DETECTI oN oF M AGE I BAS ED oN oBEL S AND AVELET W TRANS FoRM ATI oN
模板元 素和窗 1 3像素之间的对应关 系( 3× 以 3窗 1为例 ) 3
定义如下 :
厂 】】 。j lI , _o u】 一 j 】]
模 [ ‘l 一 峨, 板 ] : , o o 峨, 1 一
a d s b l e p c iey. e r u e e ma e b u i g t e t o r s l b v . x e me tlr s l h w t e p o o e t o r vd s n o e s e t l t n p o c sa n w i g y f s h w e u t a o e E p r n a e u t s o h rp s d me d p o i e r v h d n s i s h ce r ra d s o h re g st a h t sn ‘ o e ’o ‘ a ee r n fr t n’ag r h o e la e n mo t e d e h n ta ig s b l r w v ltt so ma i u a o l o i ms a n . t l
法, 如边 界跟踪法 , 基于 神经 网络 和基 于数学形 态学的方法 等 , 大多是针对各种不 同类 型 的图像 所 提 出的 , 通用性 不 是很 强。 本文在传统 方法的基 础上提出了一 种综 合的边缘检测方法。首 先利用改进的 sbl o e算子和 离散小 波变换分 别对 图像进行 边缘
经典的 sb l o e 图像边缘检 测算 法 , 是在 图像空间利用两个方 向模板 与图像进行邻 域卷积来 完成的。这两个方 向模 板一个 检 测垂直边缘 , 一个检 测水 平边 缘 , 图 1 如 所示 。图 中, 模板 内的 数 字为模板 系数 , 梯度方 向与边缘 方向总是 正交垂直 的。
器视觉有价值的物体边缘信息 。边缘 是 图像 中特性 ( 如像素灰 度、 纹理 等) 分布不连续 处 , 图像周 围特性 有 阶跃 变化 或屋脊变 幻 的那些像素集合 。图像边缘存在于 目标与背景 、 目标 与 目标 、 区域与区域 、 基元与基元 的边界 , 它标示出 目标物体或基元的实
Z agY w i Wa gY o ig・ J n u u h n u e n am n i gH i n a j
( te a ̄ a dSine C lg ,hn h i om lU irt,h nh i 02 4,hn ) Mahm t n c cs ol e Sa g a ra nv sy S ag a 0 3 C ia e e N ei 2
Kew rs y o d
Dsr ew vl as r a o ( WT E g e c o D t fs n i e ae trnf t n D ) ded t t n a i ct et o i m ei auo
( )sbl 1 oe 图像边缘检测 算法
1 引 言
图像边缘是 图像的基本 特征之 一 , 它包含对 人类视 觉和 机
1 ] 1 2
水平梯度方 向, 检测垂直边缘 垂直梯度方 向, 检测水平边缘 图 1 sb l oe 算子
际含量 , 图像识别信 息最集 中的地 方。图像边 缘检测 是 图像 是 分析的重要内容 , 也是 图像处理领域 中一种重要 的预处 理技 术 , 广泛用于轮廓 、 特征 的抽取 和纹理分析等 领域 。 传统的边缘检测方法如微分算子法 , 模板 匹配 检测 法等 , 它 们都是利用边缘临近一阶或二阶方向导数的变化规律对 图像灰 度级间断的检测 , 这类方法对噪声干扰十分敏感 , 测图像纹 当检 理较为复杂的区域时通 常失败 , 因而不 稳定 。新 的边缘检 测方