图像边缘检测算法体验步骤
拉普拉斯边缘检测算法步骤

拉普拉斯边缘检测算法步骤
拉普拉斯边缘检测算法步骤
一、算法原理
拉普拉斯边缘检测算法主要利用离散拉普拉斯算子对图像进行处理,从而检测出像素的边缘和轮廓,可以有效提取出图像中特征的精确位置。
拉普拉斯边缘检测的基本思想是:对于一个局部区域,如果该区域内的灰度值均匀,那么在该区域上拉普拉斯算子(Laplacian operator)的结果将接近于0;反之,如果该区域内的灰度分布不均匀,即存在边缘,则拉普拉斯算子的结果将不为0,通过比较结果的大小,可以判别该像素是否为边缘。
二、算法步骤
1.从原始图像中提取出高斯滤波处理后的二维离散拉普拉斯算子;
2.将拉普拉斯算子应用于原始图像的每个像素上,并计算出该像素的拉普拉斯算子结果;
3.根据拉普拉斯算子的结果,对原始图像上的像素进行细化:如果满足大于阈值要求的条件,则说明该像素点是边缘;
4.最后,对于被标记为边缘的像素点,用某种颜色或者灰度等表示,从而有效地提取出图像中的边缘和轮廓特征。
- 1 -。
边缘检测算法流程
边缘检测算法流程边缘检测是计算机视觉和图像处理中的一项关键技术。
它通过识别图像中像素强度变化的区域来提取图像的重要特征。
以下是边缘检测算法的主要流程:1.图像预处理预处理是边缘检测的第一步,主要目的是改善图像质量,为后续的边缘检测操作做准备。
预处理步骤可能包括灰度转换、噪声去除、平滑等。
这些步骤可以帮助消除图像中的噪声,并使图像的特征更加突出。
2.滤波处理滤波处理的目的是减少图像中的噪声,同时保留边缘信息。
常用的滤波器包括高斯滤波器、中值滤波器等。
滤波处理有助于提高后续边缘检测的准确性。
3.边缘检测算子边缘检测算子是边缘检测算法的核心。
常见的算子包括Sobel算子、Prewitt 算子、Canny算子等。
这些算子通过特定的数学运算来识别和提取图像中的边缘。
算子将根据图像局部像素的强度变化来确定边缘。
4.后处理后处理是对检测到的边缘进行进一步处理和优化。
这可能包括去除假阳性边缘(即非实际边缘的误检测)、连接断裂的边缘、平滑边缘等。
后处理有助于提高边缘检测结果的准确性和可解释性。
5.阈值处理阈值处理是用来确定哪些边缘是显著的,哪些不是。
通过设置一个阈值,可以将边缘检测结果转化为二值图像,其中显著的边缘被标记为特定值(通常是1),不显著的边缘被标记为0。
这有助于简化分析和降低计算复杂性。
6.边缘特征提取边缘特征提取是提取已检测到的边缘的特征的过程。
这可能包括测量边缘的角度、长度、形状等属性。
这些特征可以用于进一步的图像分析和理解,例如对象识别或场景分类。
7.性能评估性能评估是评估边缘检测算法效果的步骤。
评估指标可能包括边缘检测的准确性、计算效率、鲁棒性等。
评估也可以采用定量方法,如比较人工标定的真实边缘与检测到的边缘的相似性。
此外,还可以通过比较不同算法的检测结果来评估性能。
性能评估有助于改进和优化算法,提高其在实际应用中的表现。
实验六、图像的边缘检测
实验六、图像的边缘检测一、实验目的1、了解图像边缘提取的基本概念;2、了解进行边缘提取的基本方法;3、掌握用MA TLAB 语言进行图像边缘提取的方法。
二、实验原理图像分析和理解是图像处理的重要分支,研究为完成某一任务需要从图像中提取哪些有用的信息,以及如何利用这些信息解释图像。
从图像的分析和理解来说,最基本的两个内容就是图像的分割和区域描述。
图像分割就是将图像中具有不同含义的对象提取出来,区域描述是对对象本身及对象间关系的描述,使之具有某种指定的数学或符号表达形式,使计算机能够理解具体对象的具体含义。
图像分割可分为两种:基于边界的分割技术和基于区域的分割技术,边缘检测技术是所有基于边界分割的图像分析方法的第一步,检测出边缘的图像就可以进行特征提取和形状分析了。
因此边缘检测技术对于处理数字图像非常重要,因为边缘是所要提取目标和背景的分界线,提取出边缘才能将目标和背景区分开来。
在图像中,边界表明一个特征区域的终结和另一个特征区域的开始,边界所分开区域的内部特征或属性是一致的,而不同的区域内部的特征或属性是不同的,边缘检测正是利用物体和背景在某种图像特性上的差异来实现的,这些差异包括灰度,颜色或者纹理特征。
边缘检测实际上就是检测图像特征发生变化的位置。
由于噪声和模糊的存在,检测到的边界可能会变宽或在某些点处发生间断,因此,边界检测包括两个基本内容:首先抽取出反映灰度变化的边缘点,然后剔除某些边界点或填补边界间断点,并将这些边缘连接成完整的线。
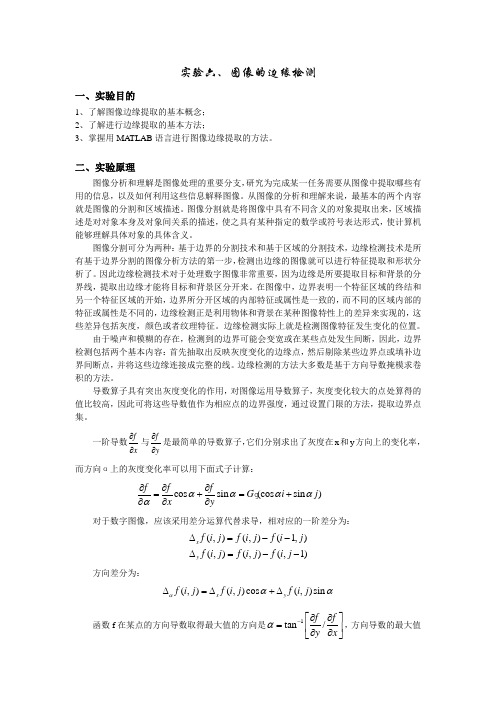
边缘检测的方法大多数是基于方向导数掩模求卷积的方法。
导数算子具有突出灰度变化的作用,对图像运用导数算子,灰度变化较大的点处算得的值比较高,因此可将这些导数值作为相应点的边界强度,通过设置门限的方法,提取边界点集。
一阶导数f x∂∂与f y∂∂是最简单的导数算子,它们分别求出了灰度在x 和y 方向上的变化率,而方向α上的灰度变化率可以用下面式子计算:cos sin (cos sin )f f f G i j x yααααα∂∂∂=+=+∂∂∂对于数字图像,应该采用差分运算代替求导,相对应的一阶差分为:(,)(,)(1,)(,)(,)(,1)x y f i j f i j f i j f i j f i j f i j ∆=--∆=--方向差分为:(,)(,)cos (,)sin x y f i j f i j f i j ααα∆=∆+∆函数f 在某点的方向导数取得最大值的方向是1tan/f f y x α-⎡⎤∂∂=⎢⎥∂∂⎣⎦,方向导数的最大值是1222f f G x y ⎡⎤⎛⎫∂∂⎛⎫=+⎢⎥⎪ ⎪∂∂⎝⎭⎢⎥⎝⎭⎣⎦称为梯度模。
图像中边缘检测的算法及实现讲解

天津职业技术师范大学Tianjin University of Technology and Education毕业设计专业:电子信息工程班级学号: 0803-14学生姓名:阮敏指导教师:曹继华教授二○一二年六月天津职业技术师范大学本科生毕业设计图像中边缘检测的算法实现Realize the Method of Image Edge Detection专业班级:电信 0803学生姓名:阮敏指导教师:曹继华教授系别:电子工程学院2012年6月摘要随着计算机技术的高速发展,数字图像技术在生活的各个领域得以广泛运用,图像边缘检测技术则是数字图像处理和计算机领域最重要的技术之一。
边缘是图像最基本的特征,包含图像中用于识别的有用信息,边缘检测是数字图像处理中基础而又重要的内容。
边缘检测的目的是标识数字图像中灰度变化明显点,而导数正好能反映图像灰度变化的显著程度,因而许多方法利用导数来检测边缘。
梯度算子简单有效,LOG算法和Canny算法边缘检测器能产生较细的边缘。
作为本文的重点边缘检测算法,该文首先介绍了常用的边缘检测算子有Roberts算子、Canny 算子、Prewitt算子、Sobel算子、LOG算子,接着从这些方法出发深入的研究了图像边缘检测的内在含义。
新算法从数字图像最基本的像素点出发,依据图像边缘的定义,从行和列两个方向近行检测。
通过对算法中的几个阀值的调整,可以按照需要得到简单或者复杂的边缘图像,并且算法在局部操作上也具备一定的优势。
在分析其算法思想和流程的基础上,利用MATLAB 对这5种算法进行了仿真实验,分析了各自的性能和算法特点,比较边缘检测效果并给出了各自的适用范围。
从中能够看出,对这一课题的研究不仅在理论方面丰富了图像边缘检测的内容,并且在实际应用中也有其重要的意义。
关键词:图像处理;边缘检测;算法;MATLABABSTRACTWith the rapid development of computer technology, digital image processing has become an emerging discipline and has been widely applied in various fields. The image edge detection technology is one of the most important technologies in the digital image processing and computer vision.Edge is the best basic characteristics of image, which is included in image and used to recognise some useful information. The edge detection techniques are the basic and important segmentation in digital image processing. The purpose of edge detection is to mark the image points that change significantly in intensity. Since derivative could reflect the significant degree of image intensity changes, derivative is used to solve the problem of edge detection in many researched. Five typical edge detection algorithms based on derivatives (Robets, Canny,Prewitt,Sobel, Log, ) are analyzed thoroughly in aspects of idea and flow. Gradient operator is brief and effective. Edge detector can produce thinner edge with LOG operator and Canny operator. As the main algorithm of edge detection in the thesis, first, it introduced some commonly used operators of edge detection, such as Roberts operator,Canny operator,Prewitt operator,Sobel operator and LOG operator Then, we can use these methods to study the intrinsic meaning of image adge detection deeply. Based on these a new edge detection algorithm is given.According to the definition of image edge, the new algorithm begins with the basic image pixel points and detects edge in the rows and columns directions. Through the adjustment of several thresholds in the algorithm we can get simple or complex edge images we need, and this algorithm also has certain advantages in local operation.Experiments are performed using MATLAB to evaluate these edge detection algorithms. The performance results are analyzed and compared with the scope of application respectively. It Can be seen that the study of this topic not only enriches the contents of image edge detection in theory,but also has its important significance in practical applications.Key Words:image processing; edge detection; algorithom; MATLAB目录1 绪论 (1)1.1 课题研究的目的和意义 (1)1.2 图像边缘检测的发展状况 (1)1.3 数字图像处理的概念 (2)1.4 数字图像处理的应用 (3)2 图像边缘检测的算法实现 (4)2.1 图像边缘检测基本算法 (4)2.2.1边缘的定义及类型分析 (4)2.2.3基于二阶导数的边缘检测 (7)2.3 边缘检测的一般步骤 (7)3 经典图像边缘检测基本算法 (9)3.1图像边缘检测基本流程 (9)3.2 经典边缘检测的基本算法 (9)3.3 差分边缘检测 (10)4 经典图像边缘检测算法 (11)4.1 图像边缘检测各种算法 (11)4.2 Roberts 算子 (11)4.2.1 Roberts算法原理 (11)4.2.2 算法流程 (11)4.2.3 仿真结果 (12)4.3 Canny算子 (12)4.3.1 Canny算法原理 (12)4.3.3仿真结果 (13)4.4 Prewitt 算子 (14)4.4.1 Prewitt 算法原理 (14)4.4.2 仿真结果 (15)4.5 Sobel 算法 (15)4.5.1算法原理 (15)4.5.2 算法流程 (16)4.5.3 仿真结果 (16)4.6 Log 算法(高斯型的拉普拉斯算法) (17)4.6.1 算法原理 (17)4.6.2算法流程 (17)4.6.3 仿真结果 (18)5 编程与调试 (19)5.1 MATLAB简介 (19)5.2 edge 函数 (19)5.3 MATLAB 仿真 (19)结论 (26)参考文献 (28)致谢 (29)1绪论1.1课题研究的目的和意义数字图像处理是伴随着计算机发展起来的一门新兴学科,随着计算机硬件、软件的高速发展,数字图像处理也在生活中的各个领域得以广泛应用。
使用计算机视觉技术进行图像边缘检测的步骤和注意事项

使用计算机视觉技术进行图像边缘检测的步骤和注意事项计算机视觉技术是一门研究如何使机器“看见”并理解图像或视频的技术。
其中一项重要的任务是图像边缘检测。
图像边缘是图像中像素灰度值变化明显的区域,边缘检测是在图像中找到这些边缘的过程。
本文将介绍使用计算机视觉技术进行图像边缘检测的步骤和注意事项。
图像边缘检测的步骤通常包括以下几个关键步骤:1. 预处理:首先,对输入的图像进行预处理。
预处理的目的是消除噪声、增强图像的对比度,以便更好地检测边缘。
常用的预处理方法包括高斯滤波、中值滤波和直方图均衡化等。
2. 灰度转换:将彩色图像转换为灰度图像。
这是因为大多数边缘检测算法在灰度图像上运行。
可以使用加权平均法或者取红、绿、蓝三个通道的平均值的方法将彩色图像转换为灰度图像。
3. 计算梯度:通过计算图像中每个像素点的梯度来确定边缘的位置。
梯度指的是图像灰度值的变化程度。
常用的方法有Sobel、Prewitt和Laplacian等算子。
这些算子可以检测水平、垂直和对角线方向上的边缘。
4. 非极大值抑制:在计算梯度之后,可能会出现多个边缘候选点。
非极大值抑制的目的是在提取出的边缘候选点中选取局部最大值,以得到更准确的边缘。
5. 双阈值处理和边缘连接:通过设置合适的阈值将边缘分为强边缘和弱边缘。
强边缘即明显的边缘,而弱边缘则可能是噪声或非边缘。
通常选择两个阈值进行分割,边缘像素灰度值大于高阈值的被标记为强边缘,灰度值介于低阈值和高阈值之间的被标记为弱边缘。
然后可以使用边缘连接的方法将弱边缘连接到强边缘,得到完整的边缘。
6. 后处理:根据应用需求进行后处理,如边缘修复、边缘精化等。
在进行图像边缘检测时,还需要注意以下几个事项:1. 选择合适的边缘检测算法:根据不同应用的需求选择适合的边缘检测算法。
常用的边缘检测算法包括Canny算法、Sobel算子、Laplacian算子等。
2. 调整算法参数:不同的边缘检测算法有不同的参数需调整。
图像的边缘检测实验报告

图像的边缘检测实验报告
《图像的边缘检测实验报告》
图像的边缘检测是计算机视觉领域中的重要技术之一,它可以帮助我们识别图
像中物体的边缘和轮廓,从而实现图像分割、特征提取和目标识别等应用。
在
本次实验中,我们将对几种常用的边缘检测算法进行比较和分析,以评估它们
在不同场景下的性能和适用性。
首先,我们使用了Sobel算子进行边缘检测。
Sobel算子是一种基于梯度的边缘检测方法,它通过对图像进行卷积操作来寻找像素值变化最大的地方,从而找
到图像中的边缘。
实验结果显示,Sobel算子在一些简单场景下表现良好,但
在复杂背景和噪声干扰较大的情况下效果不佳。
接着,我们尝试了Canny边缘检测算法。
Canny算法是一种多阶段的边缘检测
方法,它通过对图像进行高斯滤波、计算梯度、非极大值抑制和双阈值处理等
步骤来检测图像中的边缘。
实验结果显示,Canny算法在复杂场景下表现出色,能够有效地抑制噪声并找到图像中的真实边缘。
最后,我们还尝试了Laplacian算子和Prewitt算子等其他边缘检测算法,并对
它们的性能进行了比较和分析。
实验结果显示,不同的边缘检测算法在不同场
景下表现出各自的优势和劣势,需要根据具体的应用需求来选择合适的算法。
总的来说,本次实验对图像的边缘检测算法进行了全面的比较和分析,为我们
进一步深入理解和应用这些算法提供了重要的参考和指导。
希望通过这些实验
结果,我们能够更好地利用边缘检测技术来解决实际的图像处理问题,为计算
机视觉领域的发展做出更大的贡献。
marr-hildreth边缘检测算法
marr-hildreth边缘检测算法
Marr-Hildreth边缘检测算法是一种运用模板匹配和高斯函数理论,利用拉普拉斯算子在各点二阶偏导数的和来实现图像边缘检测的方法。
具体步骤如下:
1. 高斯模糊处理:利用高斯函数对图像进行平滑处理,减少噪声的影响。
2. 拉普拉斯算子计算:将平滑后的图像用拉普拉斯算子与原始图像进行卷积,得到拉普拉斯响应结果。
3. 选择阈值:筛选出响应值大于某个阈值的像素点,并标出为边缘点。
4. 非最大值抑制:保留拉普拉斯响应函数的局部极大值,并且消除不连续的阈值选定的边缘。
通过以上步骤,该算法能够在保留图像边缘的同时,消除图像噪声和重复边缘,使图像边缘检测更加准确。
但是,该算法在计算过程中存在一些问题。
如阈值选定的过程需要人工实验,容易出现选定不当的情况以及边缘检测后需要后续处理等问题。
log边缘检测算法
log边缘检测算法
log算法(Laplacian of Gaussian)是一种常用的边缘检测算法,它是通过计算图像各个像素点周围像素的差异,来提取出图像中的边缘。
具体的log边缘检测算法步骤如下:
1. 首先,将输入图像转化为灰度图像,以便进行后续的计算。
2. 对灰度图像进行高斯滤波,以消除噪声的影响。
高斯滤波可以使用一维或二维高斯卷积核进行实现。
3. 对经过高斯滤波后的图像进行拉普拉斯运算,得到图像的二阶导数。
拉普拉斯运算可以通过使用一种二阶差分算子来实现,常见的有4邻域拉普拉斯算子和8邻域拉普拉斯算子。
4. 对二阶导数图像进行阈值处理,将边缘像素提取出来。
一般可以采用全局阈值或自适应阈值的方式进行处理。
5. 对提取出的边缘像素进行连接和细化处理,去除不必要的噪声点和断点。
log边缘检测算法具有一定的局限性,如对噪声比较敏感,需
要进行高斯滤波预处理;边缘检测结果可能会有边缘连接不完整、存在断点等问题。
因此,在实际应用中,可能需要结合其他边缘检测算法进行优化和改进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图像边缘检测算法体验步骤
图像边缘检测算法体验步骤(Photoshop,Matlab)1. 确定你的电脑上已经安装了Photoshop和Matlab2. 使用手机或其他任何方式,获得一张彩色图像(任何格式),建议图像颜色丰富,分辨率比较高,具有比较明显的图像边界(卡通图像,风景图像,桌面图像)3. 将图像保存到一个能够找到的目录中,例如img文件夹(路径上没有汉字)4. 启动Photoshop,打开img文件夹中的图像5. 在工具箱中选择“矩形选择”工具,到图面上选择一个区域(如果分辨率比较高,建议不要太大,否则计算过程比较长)6. 点击下拉菜单【文件】-【新建】,新建一个与矩形选择框同样尺寸的Photoshop图像,不要求保存该图像7. 将该彩色图像转换为亮度图像,即点击下拉菜单【图像】-【模式】-【灰度】,如提示是否合并,选择“Yes”8. 将该单色的亮度图像另存为Windows的BMP文件,点击下拉菜单【文件】-【存储为】,在“存储为”窗口中,为该文件起一个名字,例如test1(保存为test1.bmp)9. 启动Matlab,将当期路径(Current Directory)定位到图像文件夹,例如这里的img文件夹10. 使用imread命令读入该图像,在命令行输入:>> f = imread(test1.bmp);11. 在Matlab中显示该图像,在命令行输入:>> figure, imshow(f)12. 然后,分别使用Matlab图像工具箱中的Edge函数,分别使用Sobel算法,高斯-拉普拉斯(Log)算法和Canny算法得到的边缘图像:在命令行输入:>> g_sobel = edge(f, sobel, 0.05); >> g_log = edge(f, log, 0.003, 2.25); >> g_canny = edge(f, canny, [0.04 0.10], 1.5);13 得到边缘图像计算结果后,显示这些边缘图像: >> figure, imshow(g_sobel) >> figure, imshow(g_log) >> figure, imshow(g_canny)14 可以用不同的图像做对比,后续课程解释算法后,可以变换不同的阈值,得到不同的边缘图像。