图像边缘检测
图像处理中的边缘检测算法分析与优化

图像处理中的边缘检测算法分析与优化随着数字图像处理技术的不断发展,边缘检测在计算机视觉、模式识别和图像分割等领域中扮演着重要的角色。
边缘是图像中灰度变化较大的区域,通过检测边缘,我们可以提取图像的形状和结构信息,从而实现图像分析和理解。
本文将对常用的图像处理边缘检测算法进行分析,并探讨优化策略。
一、边缘检测算法概述1.1 Sobel算法Sobel算法是一种基于梯度的边缘检测算法,它通过计算图像梯度的大小和方向来确定边缘位置。
Sobel算法具有计算简单、鲁棒性较高的优点,但对噪声比较敏感,在图像边缘不够明显或存在噪声时容易引入误检。
1.2 Canny算法Canny算法是一种经典的边缘检测算法,它通过多个步骤来实现高效的边缘检测。
首先,通过高斯滤波器对图像进行平滑处理,以减少噪声的影响。
然后,计算图像的梯度幅值和方向,并进行非极大值抑制,以精确地定位边缘。
最后,通过滞后阈值法来进行边缘的连接和细化。
Canny算法具有良好的边缘定位能力和抗噪能力,在实际应用中被广泛使用。
1.3 Laplacian算子Laplacian算子是一种基于二阶导数的边缘检测算子,它通过计算图像的二阶导数来检测图像中的边缘。
Laplacian算子具有对灰度变化较大的边缘敏感的优点,但对噪声比较敏感,容易产生边缘断裂和误检。
为了提高Laplacian算子的效果,常常与高斯滤波器结合使用,以减少噪声的干扰。
二、边缘检测算法优化2.1 参数选择在边缘检测算法中,参数的选择对于最终的结果具有重要的影响。
例如,对于Canny算法来说,高斯滤波器的大小和标准差的选择直接影响到边缘的平滑程度和定位精度。
因此,在优化边缘检测算法时,需要根据具体的应用场景和图像特点选择合适的参数。
2.2 非极大值抑制非极大值抑制是Canny算法中的一种重要步骤,用于精确地定位边缘位置。
然而,在进行非极大值抑制时,会产生边缘断裂和不连续的问题。
为了解决这个问题,可以考虑使用像素邻域信息进行插值,从而减少边缘的断裂,并得到更连续的边缘。
图像边缘检测的方法

图像边缘检测的方法图像边缘检测是在计算机视觉领域中一项重要的任务,它可以用来提取图像中物体的轮廓或边界信息。
常用的图像边缘检测方法包括基于梯度的方法、基于边缘模型的方法和基于机器学习的方法。
1. 基于梯度的方法基于梯度的方法通过计算图像中灰度的梯度来检测图像的边缘。
常用的基于梯度的方法包括Sobel算子、Prewitt算子和Canny算子。
(1)Sobel算子:Sobel算子是一种常用的边缘检测算子,它通过在图像中滑动一个3x3的卷积核来计算图像灰度的梯度。
它分别计算水平和垂直方向上的梯度,并将两个方向上的梯度相加得到最终的边缘强度。
(2)Prewitt算子:Prewitt算子与Sobel算子类似,也是通过计算图像灰度的水平和垂直方向上的梯度来检测边缘。
不同之处在于Prewitt算子使用了不同的卷积核,其效果也有所差异。
(3)Canny算子:Canny算子是一种边缘检测算法,它通过多个步骤来获得较为准确的边缘结果。
首先,它使用高斯滤波器对图像进行平滑处理,然后计算图像灰度梯度的幅值和方向。
接着,通过非极大值抑制来细化边缘。
最后,使用双阈值处理来检测和连接真正的边缘。
2. 基于边缘模型的方法基于边缘模型的方法是利用边缘在图像中的几何特征来进行检测。
常用的基于边缘模型的方法包括Hough变换和边缘跟踪算法。
(1)Hough变换:Hough变换是一种广泛应用于边缘检测的方法,它可以将图像中的边缘表示为参数空间中的曲线或直线。
通过在参数空间中寻找曲线或直线的交点,可以得到图像中的边缘。
(2)边缘跟踪算法:边缘跟踪算法是一种基于像素领域关系的边缘检测方法。
它首先选择一个起始点作为边缘点,然后根据一定的规则选择下一个与当前点相邻的点作为新的边缘点,并将其加入到边缘集合中。
通过不断跟踪边缘点,可以得到完整的边缘。
3. 基于机器学习的方法基于机器学习的方法是近年来较为流行的一种图像边缘检测方法。
它利用大量的已标注的训练数据来训练模型,然后使用训练好的模型对新的图像进行边缘检测。
图像边缘检测原理及方法
一、图像边缘检测原理
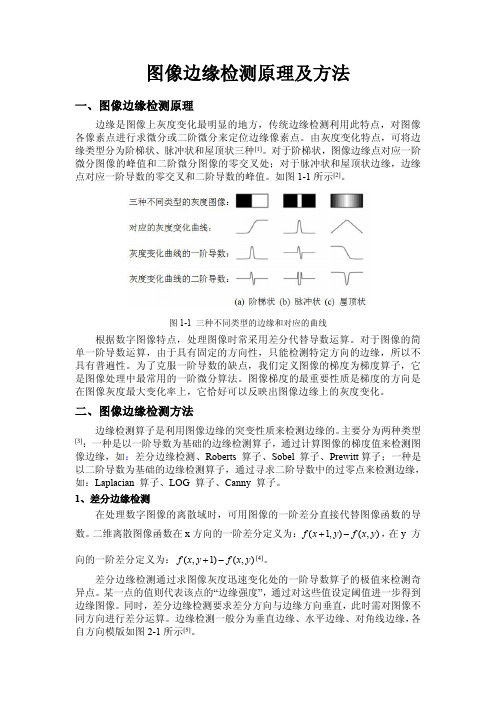
边缘是图像上灰度变化最明显的地方,传统边缘检测利用此特点,对图像 各像素点进行求微分或二阶微分来定位边缘像素点。由灰度变化特点,可将边 缘类型分为阶梯状、脉冲状和屋顶状三种[1]。对于阶梯状,图像边缘点对应一阶 微分图像的峰值和二阶微分图像的零交叉处;对于脉冲状和屋顶状边缘,边缘 点对应一阶导数的零交叉和二阶导数的峰值。如图 1-1 所示[2]。
0 0 0 -1 1 0 0 0 0
垂直边缘
0 -1 0 0 1 0 0 0 0
水平边缘
-1 0 0 0 1 0 0 0 0
对角线边缘
图 2-1 差分算法检测边缘的方向模板 差分边缘是基本且原始的方法,根据阶跃边缘情况原理,利用导数算子检测 边缘。这种算子要求方向性,计算繁琐,因此很少采用。 2、Roberts 算子 Roberts 边缘检测算子[6]利用局部差分算子寻找边缘的算子,采用对角线方 向相邻像素之差近似梯度幅值检测边缘, 原理是根据任意一对互相垂直方向上的 差分可计算梯度。
s x { f ( x 1, y 1) 2 f ( x 1, y ) f ( x 1, y 1)} { f ( x 1, y 1) 2 f ( x 1, y ) f ( x 1, y 1)} s y { f ( x 1, y 1) 2 f ( x, y 1) f ( x 1, y 1)} { f ( x 1, y 1) 2 f ( x, y 1) f ( x 1, y 1)}
xf f (i, j ) f (i 1, j 1) xf f (i, j 1) f (i 1, j ) R (i, j ) 2x f 2y f 或 R (i, j ) x f y f
图像处理中的边缘检测和特征提取方法
图像处理中的边缘检测和特征提取方法图像处理是计算机视觉领域中的关键技术之一,而边缘检测和特征提取是图像处理中重要的基础操作。
边缘检测可以帮助我们分析图像中的轮廓和结构,而特征提取则有助于识别和分类图像。
本文将介绍边缘检测和特征提取的常见方法。
1. 边缘检测方法边缘检测是指在图像中找到不同区域之间的边缘或过渡的技术。
常用的边缘检测方法包括Sobel算子、Prewitt算子和Canny算子。
Sobel算子是一种基于梯度的边缘检测算法,通过对图像进行卷积操作,可以获取图像在水平和垂直方向上的梯度值,并计算获得边缘的强度和方向。
Prewitt算子也是一种基于梯度的边缘检测算法,类似于Sobel算子,但其卷积核的权重设置略有不同。
Prewitt算子同样可以提取图像的边缘信息。
Canny算子是一种常用且经典的边缘检测算法。
它结合了梯度信息和非极大值抑制算法,可以有效地检测到图像中的边缘,并且在边缘检测的同时还能削弱图像中的噪声信号。
这些边缘检测算法在实际应用中常常结合使用,选择合适的算法取决于具体的任务需求和图像特点。
2. 特征提取方法特征提取是指从原始图像中提取出具有代表性的特征,以便进行后续的图像分析、识别或分类等任务。
常用的特征提取方法包括纹理特征、形状特征和颜色特征。
纹理特征描述了图像中的纹理信息,常用的纹理特征包括灰度共生矩阵(GLCM)、局部二值模式(LBP)和方向梯度直方图(HOG)。
GLCM通过统计图像中像素之间的灰度变化分布来描述纹理特征,LBP通过比较像素与其邻域像素的灰度值来提取纹理特征,HOG则是通过计算图像中梯度的方向和强度来提取纹理特征。
这些纹理特征可以用于图像分类、目标检测等任务。
形状特征描述了图像中物体的形状信息,常用的形状特征包括边界描述子(BDS)、尺度不变特征变换(SIFT)和速度不变特征变换(SURF)。
BDS通过提取物体边界的特征点来描述形状特征,SIFT和SURF则是通过提取图像中的关键点和描述子来描述形状特征。
医学图像处理中的边缘检测与分割算法

医学图像处理中的边缘检测与分割算法边缘检测与分割是医学图像处理中的重要部分,被广泛应用于疾病诊断、医学影像分析和手术辅助等领域。
边缘检测算法用于提取图像中的边缘信息,而分割算法则可以将图像划分为不同的区域,有助于医生对图像进行进一步分析和诊断。
一、边缘检测算法在医学图像处理中,常用的边缘检测算法包括基于梯度的方法、基于模型的方法和基于机器学习的方法。
1. 基于梯度的方法基于梯度的边缘检测算法通过计算图像中像素点的梯度值来确定边缘位置。
常用的算法包括Sobel算子、Prewitt算子和Canny算子。
Sobel算子是一种常用的离散微分算子,通过在图像中对每个像素点应用Sobel算子矩阵,可以得到图像的x方向和y方向的梯度图像。
通过计算梯度幅值和方向,可以得到边缘的位置和方向。
Prewitt算子与Sobel算子类似,也是一种基于梯度的边缘检测算子。
它通过将图像中的每个像素点与Prewitt算子矩阵进行卷积运算,得到图像的x方向和y方向的梯度图像。
进一步计算梯度幅值和方向,可以确定边缘的位置和方向。
Canny算子是一种经典的边缘检测算法,它采用多步骤的方法来检测边缘。
首先,对图像进行高斯滤波来减少噪声。
然后,计算图像的梯度幅值和方向,进一步剔除非最大值的梯度。
最后,通过设置双阈值来确定真正的边缘。
2. 基于模型的方法基于模型的边缘检测算法借助数学模型来描述边缘的形状和特征。
常用的算法包括基于边缘模型的Snake算法和基于边缘模型的Active Contour算法。
Snake算法(也称为活动轮廓模型)是一种基于曲线的边缘检测算法。
它通过将一条初始曲线沿着图像中的边缘移动,使得曲线更好地贴合真实边缘。
Snake算法考虑了边缘的连续性、平滑性和能量最小化,可以获得较为准确的边缘。
Active Contour算法是Snake算法的进一步发展,引入了图像能量函数。
通过最小化能量函数,可以得到最佳的边缘位置。
Active Contour算法可以自动调整曲线的形状和位置,适应复杂的图像边缘。
边缘检测的原理

边缘检测的原理边缘检测是数字图像处理中的常见任务,它能够识别并提取出图像中物体的边缘信息。
在计算机视觉和模式识别领域,边缘特征对于物体识别、分割以及图像理解非常重要。
本文将介绍边缘检测的原理及其常用的方法。
一、边缘的定义边缘是图像中亮度变化剧烈处的集合。
在图像中,边缘通常表示物体之间的分界线或物体自身的边界轮廓。
边缘通常由亮度或颜色的不连续性引起,可以用于图像分析、特征提取和图像增强等应用中。
二、边缘检测的原理边缘检测的目标是找到图像中的所有边缘,并将其提取出来。
边缘检测的原理基于图像亮度的一阶或二阶变化来进行。
常用的边缘检测原理包括:1. 一阶导数方法一阶导数方法利用图像亮度的一阶导数来检测边缘。
最常见的方法是使用Sobel算子、Prewitt算子或Roberts算子计算图像的梯度,然后通过设置合适的阈值将梯度较大的像素点判定为边缘。
2. 二阶导数方法二阶导数方法通过对图像亮度进行二阶导数运算来检测边缘。
其中,Laplacian算子是最常用的二阶导数算子,它可以通过计算图像的二阶梯度来获取边缘信息。
类似于一阶导数方法,二阶导数方法也需要设定适当的阈值来提取边缘。
3. Canny算子Canny算子是一种广泛使用的边缘检测算法,它综合了一阶和二阶导数方法的优点。
Canny算子首先使用高斯滤波平滑图像,然后计算图像的梯度和梯度方向,并根据梯度方向进行非极大值抑制。
最后,通过双阈值算法检测出真正的边缘。
三、边缘检测的应用边缘检测在计算机视觉和图像处理中具有广泛的应用。
以下是一些常见的应用:1. 物体检测与分割边缘检测可以帮助识别图像中的物体并进行分割。
通过提取物体的边缘,可以实现对图像内容的理解和分析。
2. 图像增强边缘检测可以用于图像增强,通过突出图像中的边缘信息,使图像更加清晰和饱满。
3. 特征提取边缘是图像中最重要的特征之一,可以用于物体识别、图像匹配和目标跟踪等应用中。
通过提取边缘特征,可以实现对图像的自动识别和分析。
图像处理中的边缘检测方法与性能评估

图像处理中的边缘检测方法与性能评估边缘检测是图像处理和计算机视觉领域中的一项重要任务。
它主要用于提取图像中物体和背景之间的边界信息,便于后续的图像分割、目标识别和物体测量等应用。
在图像处理领域,边缘被定义为亮度、颜色或纹理等属性上的不连续性。
为了实现准确且可靠的边缘检测,许多不同的方法和算法被提出并广泛应用。
在本文中,我们将介绍几种常见的边缘检测方法,并对它们的性能进行评估。
1. Roberts 算子Roberts 算子是一种基于差分的边缘检测算法,它通过对图像进行水平和垂直方向的差分运算来检测边缘。
这种算法简单且易于实现,但对噪声比较敏感。
2. Sobel 算子Sobel 算子是一种常用的基于梯度的边缘检测算法。
它通过在图像上进行卷积运算,计算像素点的梯度幅值和方向,从而检测边缘。
Sobel 算子可以有效地消除噪声,并在边缘方向上提供更好的响应。
3. Canny 边缘检测Canny 边缘检测是一种经典的边缘检测算法。
它包括多个步骤,包括高斯滤波、计算梯度幅值和方向、非极大值抑制和双阈值处理。
Canny 边缘检测算法具有较高的准确性和鲁棒性,广泛应用于实际图像处理中。
除了以上提到的方法外,还存在许多其他的边缘检测算法,如拉普拉斯算子、积分图像算法等。
这些算法各有优缺点,选择合适的算法需要根据具体应用情况和要求来确定。
对于边缘检测方法的性能评估,通常使用以下几个指标来衡量:1. 精确度精确度是评估边缘检测算法结果与真实边缘之间的差异的指标。
可以通过计算检测结果与真实边缘的重叠率或者平均绝对误差来评估。
2. 召回率召回率是评估边缘检测算法是否能够正确检测到真实边缘的指标。
可以通过计算检测结果中的边缘与真实边缘的重叠率或者正确检测到的边缘像素数量与真实边缘像素数量的比值来评估。
3. 噪声鲁棒性噪声鲁棒性是评估边缘检测算法对图像噪声的抗干扰能力的指标。
可以通过在含有不同噪声水平的图像上进行测试,并比较检测到的边缘结果与真实边缘的差异来评估。
图像处理中的边缘检测方法

图像处理中的边缘检测方法边缘检测是图像处理中一项重要任务,它可以通过识别图像中的边缘来揭示物体的轮廓和边界。
在计算机视觉、模式识别和图像分析等领域,边缘检测被广泛应用于目标检测、图像分割、特征提取等方面。
本文将介绍几种常见的图像处理中的边缘检测方法,包括Sobel算子、Canny算子和Laplacian算子。
1. Sobel算子Sobel算子是一种基于差分运算的边缘检测算法,它通过计算图像中像素值的梯度来确定边缘。
Sobel算子采用了一种基于离散卷积的方法,通过在水平和垂直方向上应用两个3×3的卷积核,分别计算出水平和垂直方向的梯度值,最后将两个梯度值进行合并,得到最终的梯度幅值。
Sobel算子在图像边缘检测中表现出色,但它对噪声敏感,需要进行预处理或者使用其他滤波方法。
2. Canny算子Canny算子是一种经典的边缘检测算法,它综合了图像平滑、梯度计算、非极大值抑制和双阈值处理等步骤。
首先,Canny算子使用高斯滤波器对图像进行平滑处理,以减少噪声的影响。
然后,它计算图像中每个像素的梯度幅值和方向,并进行非极大值抑制,保留局部最大值点。
最后,通过设置低阈值和高阈值,将梯度幅值分为强边缘和弱边缘两部分,并通过迭代连接强边缘像素点来得到最终的边缘图像。
3. Laplacian算子Laplacian算子是一种基于二阶微分的边缘检测算法,它通过计算图像中像素值的二阶导数来确定边缘。
Laplacian算子可以通过二阶离散卷积来实现,它对图像中的边缘部分具有一定的抑制作用,并提供了更加精细的边缘信息。
在应用Laplacian算子之前,通常需要对图像进行灰度化处理,以减少计算量和提高边缘检测效果。
与Sobel和Canny 算子相比,Laplacian算子对噪声的影响较小,但容易产生边缘断裂和边缘响应不稳定的问题,因此在实际应用中需要进行适当的后处理。
综上所述,Sobel算子、Canny算子和Laplacian算子是图像处理中常用的边缘检测方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
V ol.15, No.1©2004 Journal of Software 软 件 学 报 1000-9825/2004/15(01)0000 图像边缘检测Edge Detection of ImageLi Jie(Department of Computer Science and Technology,Nanjing University, Nanjing, China)Email:lijie1108@摘 要: 边缘检测是在图像的局部区域上针对像素点的一种运算,在计算机视觉、图像理解等应用中扮演着重要的角色,同时也是图象分析与模式识别的重要环节。
因为图像的边缘包含了模式识别的有用信息,所以边缘检测是图像分析和模式识别中特征提取的主要手段,也使得边缘检测在计算机视觉的一些预处理算法中有着重要的地位。
另外,随着科技日新月异的发展,边缘检测技术也逐渐运用到生产和生活中。
因此,对边缘检测的研究也有很重要的实际应用价值。
本文介绍了边缘检测的一般步骤,对灰度图像的几种边缘检测算法,作简单的介绍。
关键词: 边缘检测; 经验模型分解;Sobel 算子;神经网络中图法分类号: TP-301 文献标识码: A1 引言边缘检测是图像处理领域中最基本的问题,也是经典的技术难题之一,它的解决对于进行高层次的特征提取、特征描述、目标识别和图像理解等有着重大的影响。
因此,边缘检测在图像分割、模式识别、计算机视觉等众多方面都有着非常重要的地位。
然而由于成像过程中的投影、混合、畸变和噪声等导致图像的模糊和变形,边缘往往难于检测,这使得人们一直致力于构造具有良好性质的边缘检测算子。
边缘检测的研究有着久远的历史,其原因一方面是由于课题本身的重要性,另一方面也反映了这个课题的深度和难度。
所以,边缘检测方面的研究具有非常重要的理论意义。
由于边缘为图像中灰度发生急剧变化的区域边界,传统的图像边缘检测方法大多可归结为图像高频分量的增强过程,微分运算自然就成了边缘检测与提取的主要手段。
人们最早提出了一阶微分边缘算子,用图像灰度分布的梯度来反映图像灰度的变化,最早如1965年提出的Robert 算子[1],在Robert 算子基础上改进得到的sobel[1]算子、Prewitt[1]算子和Kirsh 算子等。
但是,这些算子由于梯度或一阶微分算子通常在图像边缘附近的区域内产生较宽的响应,故上述算子检测到的边缘图像常需作细化处理,这就影响了边缘定位的精度。
因而又产生了与边缘方向无关的二阶微分边缘检测算子,即LaPlacian 算子[2l 。
利用二阶导数零交叉所提取的边缘宽度为一个像素,所得的边缘结果无需细化,有利于边缘更准确的定位。
近年来,随着科学技术的发展,利用各种新的理论工具对图像进行边缘检测的方法得到了广泛的研究和应用。
例如基于形态学的边缘检测算子,借助统计学方法的检测技术[7]、利用神经网络的检测技术[8]、利用模糊理论的检测技术[9]、利用信息论的检测技术[10]、利用遗传算法的检测技术、基于分形特征的边缘检测技术[24]等的研究也相继出现,表现相当活跃。
由于实际图像都含有噪声,并且噪声的分布、方差等信息也都是未知的,而噪声和边缘都是高频信号。
外加物理和光照等原因,实际图像中的边缘常常发生在不同的尺度范围上,并且每一边缘像元的尺度信息是未知的。
因此,传统的边缘检测算法检测效果并不理想。
2 Journal of Software 软件学报 2004,15(1) 2 边缘检测的步骤和常用算法2.1 边缘检测的基本步骤1.滤波[16]:边缘和噪声同属图像中强度变化剧烈的部位因此边缘检测算子对边缘和噪声都很敏感,因此必须使用滤波器来改善与噪声有关的边缘检测算子的性能。
2.增强:增强边缘的基础是确定图像各点邻域强度的变化值。
增强算法可以将邻域(或局部)强度之有显著变化的点突显出来。
3.检测:在图像中有许多点的梯度幅值比较大,而这些点在特定的应用领域中并不都是边缘,所以应该用某种方法来确定哪些点是边缘点。
最简单的边缘检测判据是利用梯度幅值的阈值作为判据。
4.定位:边缘定位即确定边缘点的具体位置,除此之外还应包括边缘细化、连接。
图2.1边缘检测的流程2.2 常用边缘检测算法 经典的边缘检测算法主要有微分法和最优算子法,微分法是通过利用经典的微分算子[3]检测图像的边缘,主要包括Roberts 算子、Sobel 算子、Prewitt 算子、Kirsch 算子和Laplacian 算子等,最优算子法则是微分算子发展和优化,主要有LOG 算子和Canny 算子等。
微分法的基本工具是微分算子,它是最原始、最基本的边缘检测算法,检测原理基于灰度图像边缘处的一阶导数有极值,二阶导数存在过零点。
在对边缘求导时,需要对每个位置的像素进行计算,在实际检测中常常用模板卷积的方法来近似计算。
最优算子法是在微分算子法的基础上发展起来的边缘检测算子,根据信噪比求得边缘的最优滤波器,常见有LOG 算子和Canny 算子(本文不作介绍)。
3 灰度图像微分算法3.1 一阶微分方法一阶微分方法通过梯度算子或一阶导数算子估计图像灰度变化的方向,增强图像中的灰度变化区域,然后对增强区域进一步判断。
对于连续函数),(y x I ,它在点)(y x ,处的x 方向,y 方向和θ方向的一阶方向导数为:()x y x I y x I x ∂∂=),(, (3.1)y y x I y x I y ∂∂=),(),( (3.2) θθθsin ),(cos ),(),(y y x I x y x I y x I ∂∂+∂∂= (3.3)它在点),(y x 处的梯度为一个矢量,定义为:作者名 等:题目 3[]⎥⎦⎤⎢⎣⎡∂∂∂∂=∇y I x I G G y x I y x ,,),(τ= (3.4)梯度数值为:22)()(||y x grad ∂∂+∂∂= (3.5)梯度方向与水平方向的夹角为:x Iy I∂∂∂∂=arctan ϕ (3.6)许多经典算子都是基于上述理论提出来的,如Sobel 算子、Roberts 算子、Prewitt 算子等。
但在具体应用时,由于数字图像的离散性,所以在数字图像中常常以图像的一阶差分运算代替图像的一阶微分运算。
3.2 Sobel 算子下面简单介绍下Sobel 算子[3]。
Sobel 算子是一个离散微分算子,它计算一个图像强度的梯度近似值。
在图像的每一个点,Sobel 算子的结果是一个梯度向量或者是个向量范数。
它是计算以该点为中心的3⨯3点阵的),(y x f 的偏导数。
为了抑制噪声,给它的中心点加一个权重,则它的数字梯度近似等于下式:)}1,1(),1(2)1,1({)}1,1(),1(2)1,1({--+-+---+++++-+=y x f y x f y x f y x f y x f y x f G x (3.7))}1,1()1,(2)1,1({)}1,1()1,(2)1,1({-++-+---++++++-=y x f y x f y x f y x f y x f y x f G y (3.8)梯度大小为:22),(y x G G y x g += (3.9)它的卷积模板算子如下:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=101202101x T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=121000121y T (3.10) 如果使用Sobel 检测图像M 的边缘,我们可以使用水平模板x T 和垂直模板y T 来旋转图像,不考虑边缘条件,可以得到2个同样大小的梯度矩阵M1和M2作为原始图像,然后总的梯度值可以通过两个梯度矩阵相加得到,再通过阈值法得到图像的边缘。
3.3 经验模型分解算法经验模型分解(EMD )[19]是一种高适应性的分解。
它可以把任意复杂的信号分解成内部函数模型集(IMF )。
第一个IMF 图像[13]包含了边缘的很多重要特征。
从第一个IMF 图像中提取了边缘像素后,通过一4 Journal of Software软件学报2004,15(1)个合适的阈值,我们可以得到一个清晰的边缘图像。
具体算法步骤如下:1.通过柱状图相似来处理原始图像,来提高图像的对比度。
2.应用BEMD[4][20]来得到一个IMF图像。
3.大多数的背景像素都在0.5左右,根据尖锥装的柱状图,我们可以得到阈值,这个阈值在0.1到0.2之间。
利用这个阈值移除不重要的像素点维持重要的边缘像素点。
方法:用每个像素的灰度值减去0.5,如果绝对值小于阈值,则将它的灰度值设为0,否则设为1。
4.抽取了边缘像素点后,图像有一个很清晰的边缘,这时候有些粗边缘需要削细。
5.最后移除一些独立的像素点,就得到了最后的边缘图像。
图3.1 经验分解算法流程图3.4 神经网络边缘检测算法为了检测有256灰度值的灰度图像的边缘,可以考虑一个类似BP神经网络[5][18]的模型,该模型由8个子BP神经网络组成,每一个子网络可以检测2值图像的边缘。
每一个子BP神经网络对应灰度图像的一个位平面。
每个神经网络的输出会根据每个位平面的权重做调整。
8个位平面的权重依次为1/256、2/256、4/256、8/256、16/256、32/256、64/256、128/256。
通过类似的模型,可以很精确的检测出灰度图像的边缘。
结构如图3.2所示:作者名等:题目 5图3.2神经网络边缘检测算法的模型结构图4 总结边缘检测是图像处理领域中最基本的问题,也是图像处理其他工作的前提。
然而,在研究图像边缘的时候,不可避免的会受到噪声等的干扰。
前人提出的很多经典算法,比如微分算子法,BP神经网络算法,基于关联规则的检测算法[14]等,边缘检测效果都不是特别理想。
这就需要我们寻找更好的算法。
致谢在此,向对本文的工作给予支持和建议的同学,特别是对教授我们计算机视觉课程的张琰老师表示感谢!References:[1] 冈萨雷斯,数值图像处理[M].北京:电子工业出版社,2003,471-474[2] 孙即祥,数字图像处理,河北出版社,1993.[3] Wenshuo Gao, Lei Yang, Xiaoguang Zhang, Huizhong Liu, An Improved Sobel Edge Detection. ©2010 IEEE978-1-4244-5540-9/10/[4] LingFei Liang , ZiLiang Ping. An Edge Detection Algorithm of Image Based On Empirical Mode Decomposition. © 2008 IEEEDOI 10.1109/IITA.2008.324[5] Weiqing Li, Chengbiao Wang, Qun Wang, Guangshe Chen,An Edge Detection Method Based on Optimized BP Neural Network. ©2008 IEEE DOI 10.1109/ISISE.2008.310[6] S. Beucher, Geodesic reconstruction, saddle zones and hierarchical segmentation, Image Anal .Stereol. 20(2001) pp.137-141[7] S.Konishi, A.Yuille and J.Coughlan. A statistical approach to multi-scale edge detection. Image and VisionComputing ,2003,(21):37-485.[8] S.C.Douglas, T.H.Meng. Design of Edge Detection Templates Using a Neural Network. Proc. International Joint Conference onNeural Networks.1990,2:331-334.[9] D.S.Kim, W.H.Lee and I.S.Kweon.Automatic edge detection using 3*3 ideal binary pixel patterns and fuzzy-based edgethresholding. Pattern Recognition Letters,2004,(25):101-106.[10] Q.Tian,X.Li and N.M.Bilgutay.Multiple Target Detection Using Split Spectrum Processing and Group Delay Moving Entropy.IEEETrans. On UFFC.1995,42(6):1075-1886.[11] 薛东辉,朱耀庭,朱光喜,等,基于尺度分维的图像边缘检测方法研究。