基于双目立体视觉的动态体积测量系统.
双目立体视觉测量系统的标定

双目立体视觉测量系统的标定杨景豪;刘巍;刘阳;王福吉;贾振元【期刊名称】《光学精密工程》【年(卷),期】2016(024)002【摘要】考虑传统的自标定方法虽然无需场景信息即可实现摄像机标定,但是标定精度较低,故本文提出了一种新的大视场双目视觉测量系统自标定方法.该方法无需高精度标定板或者标定物,仅需利用空间中常见的平行线和垂直线建立摄像机参数与特征线间的约束方程,即可实现摄像机的内参数与旋转矩阵标定;同时利用空间中距离已知的3个空间点即可线性标定两摄像机间的平移向量.通过标定实验对本文提出的方法进行了验证.结果表明:该方法标定精度能够达到0.51%,可以较高精度地标定双目测量系统.由于避免了大视场测量系统标定中大型标定物制造困难,以及摄像机自标定过程中算法冗杂,标定精度不高等问题,该方法操作简便,精度较好,适用于大视场双目测量系统的在线标定.【总页数】9页(P300-308)【作者】杨景豪;刘巍;刘阳;王福吉;贾振元【作者单位】大连理工大学教育部精密特种加工实验室,辽宁大连116024;大连理工大学教育部精密特种加工实验室,辽宁大连116024;大连理工大学教育部精密特种加工实验室,辽宁大连116024;大连理工大学教育部精密特种加工实验室,辽宁大连116024;大连理工大学教育部精密特种加工实验室,辽宁大连116024【正文语种】中文【中图分类】TP391;TB92【相关文献】1.基于双目立体视觉的大范围光笔测量系统研究 [J], 肖伟红;王彬;郑光辉;漆振华2.稳定高精度的双目立体视觉测量系统标定方法 [J], 马俊;3.稳定高精度的双目立体视觉测量系统标定方法 [J], 何万涛;梁永波;李景贺4.基于双目立体视觉的小型工件测量系统 [J], 赵琛; 江卫华5.双目立体视觉测量系统的精度分析 [J], 杨洪涛;何海双;李莉;张荣荣;张宇因版权原因,仅展示原文概要,查看原文内容请购买。
双目测量原理

双目测量原理是指通过两个摄像头或相机来获取目标物体的三维空间信息。
它基于人类视觉系统的工作原理,利用两个视点之间的视差来计算目标物体的深度。
双目测量原理的基本步骤如下:
1. 采集图像:使用两个摄像头或相机同时拍摄目标物体的图像。
这两个摄像头或相机需要具有一定的间距,以模拟人类的双眼视觉。
2. 特征点提取:从两个图像中提取出一些特征点,例如角点、边缘等。
这些特征点在两个图像中具有一定的对应关系。
3. 视差计算:通过比较两个图像中特征点的位置差异,可以计算出它们之间的视差。
视差是指同一物体在两个视点下的像素位置差异。
4. 三角测量:利用视差和摄像头之间的几何关系,可以得到目标物体的深度信息。
三角测量是指利用两个视点和目标物体的特征点构成的三角形,通过几何关系计算出目标物体的空间位置。
双目测量原理的优点是可以获取目标物体的三维信息,可以用于距离测量、物体识别和姿态估计等应用。
但也存在一些限制,例如对于光照条件和纹理的要求较高,对于透明物体和反射物体的测量效果较差。
基于双目视觉的机械零件位姿检测系统研究

算法实现:使用编 程语言实现算法, 并进行测试和验证
算法评估:对算法 进行评估,比较与 其他算法的优劣
测试目的:验证机械零件位姿 检测系统的准确性和可靠性
测试环境:实验室和实际生产 线
测试方法:对比实验、重复测 试和异常测试
测试结果:高准确率和低误差 率
相机标定是确定相机内 部参数和外部参数的过 程,通过标定可以获得 相机的高精度模型。
双目立体标定:确定左右相机之间的相对位置和姿态,以及基线距离等参数
优化算法:采用优化算法对标定结果进行优化,提高标定精度
优化算法:采用先进的优化算法,提高标定精度和速度 参数调整:根据实际情况调整相机参数和标定板规格,提高标定效果 多视角标定:采用多视角标定方法,提高标定结果的稳定性和可靠性 实践应用:将双目视觉系统应用于实际生产中,不断优化和改进系统性能
常见的相机标定方法包括 张氏标定法、两步法等, 这些方法都需要使用已知 尺寸和位置的标定板作为 参照物。
相机标定的精度直接影 响到双目视觉系统的测 量精度,因此需要进行 高精度的相机标定。
在进行相机标定时,需 要注意消除相机的畸变, 以提高标定精度和双目 视觉系统的测量精度。
相机内参标定:确定相机内部参数,如焦距、光心等 相机外参标定:确定相机相对于标定物的位置和姿态
触、低成本
挑战:光照条 件、目标遮挡、 复杂背景、实
时性
硬件部分:包 括双目视觉相 机、机械零件、
标定板等
软件部分:包 括图像采集、 预处理、特征 提取、位姿计
算等模块
算法部分:采 用基于特征匹 配的位姿计算 方法,实现机 械零件的位姿
检测
应用部分:将 位姿检测结果 应用于机械零 件的自动化装 配和质量控制
双目立体视觉系统的分析
() 3 梯度大小和方 向的计算利用公式 (.) 出。 1 得 3 () 4 在第 四个步骤 , 边缘 的梯度方 向分为 4组 。例如 , 水
。
因为它体现 了机器人在非结构化环境 中移动过程的重要意 梯度方 向上前后两个像素的灰度值相比不是最大, 那么这个像
义。
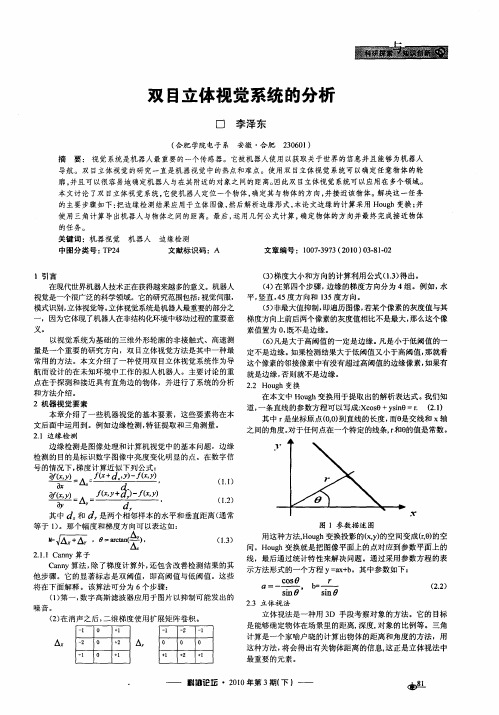
素值置为 0 既不是边缘。 , 以视觉系统 为基础 的三 维外形轮廓 的非接触式 、高速测 ( ) 是 大 于 高 阈值 的一 定 是 边 缘 。 是 小 于低 阈值 的一 6凡 凡 量是一个重要 的研 究方 向,双 目立体视觉方法是其中一种最 定不是边缘 。 如果检测结果大于低阈值 又小于高 阈值 , 那就看 常 用 的方 法 。本 文 介 绍 了一 种 使 用 双 目立 体 视 觉 系 统 作 为 导 这个像素的邻接像素中有没有超过 高阈值的边缘像素 , 如果有 航 而 设 计 的在 未 知 环 境 中工 作 的拟 人 机 器 人 。主 要 讨 论 的 重 就 是 边 缘 , 则 就 不 是 边 缘 。 否 点在 于 探 测 和 接 近 具 有 直 角 边 的物 体 ,并 进 行 了系 统 的 分 析 22 . Ho 曲 变换 u 和方法介绍 。 在本文 中 Ho g u h变换用于提取 出的解析表达式 。 我们知 2机器视觉要素 道 , 条 直 线 的 参 数方 程 可 以 写 成 :c s 一 X o0+y i0 (.) s =L 21 n 本章介绍 了一些机器视觉 的基本要素 ,这些要素将在本 其中r 是坐标原点(, N直线 的长度 , 是交线和 x轴 Oo ) 而0 文 后 面 中运 用 到 。例 如 边 缘 检 测 , 征提 取 和 三 角 测 量 。 特 之 间的角度。 对于任何 点在一个特 定的线条,和e r 的值是常数。
平行双目立体视觉的测距系统

图2
XZ 面投影
由三角形相似可得: Pr B d-f = d Ar Pr + Pr B b - Al Pl + Ar Pr + Pr B d-f = d b + Ar Pr + Pr B ( 2 ) 联立可得: 由式( 1 ) 、 ( 1) ( 2)
收稿日期: 2012-07-02 。 作者简介: 刘盼( 1987 - ) , 女, 北京人, 硕士研究生, 主要研究方向: 嵌入式系统; 方向: 嵌入式系统、 信息监测及智能控制 、 生物传感技术、 生物信息提取。
图1
平行双目立体成像原理
1
双目立体视觉原理
在双目视觉中, 每只眼睛的视网膜上先各形成一个独立的 视像, 通常它们不完全相同, 这是因为人的两眼相距约 65 mm, 当人观察一个立体物体时是从不同角度来观察的, 具体说来说 右眼看到物体的右边多点, 物 就是左眼看到物体的左边多点, 体上所被注视中心的像会落在两眼视网膜的相应点上, 而其他 [3 ] 点则落在非相应部位, 因而两眼视像不同, 这就是两眼视差 。 双目立体视觉就是基于视差原理恢复出物体的三维几何信息, 并重建物体三维轮廓及位置的。最基本的双目立体几何关系 它由两个完全相同的摄像机构成, 且两个摄像机 如图 1 所示, [4 ] 平行放置 。将模measurement system based on parallel binocular stereo vision
LIU Pan , WANG Jinhai
( School of Electronic and Information Engineering, Tianjin Polytechnic University, Tianjin 300387 , China)
《基于双目视觉的三维重建关键技术研究》

《基于双目视觉的三维重建关键技术研究》一、引言三维重建技术在现代社会具有广泛的应用场景,包括虚拟现实、机器人导航、无人驾驶等领域。
其中,基于双目视觉的三维重建技术因其高效、准确的特点,成为了研究的热点。
本文将深入探讨基于双目视觉的三维重建的关键技术,分析其原理、方法及挑战,旨在为相关研究提供参考。
二、双目视觉三维重建原理双目视觉三维重建技术基于人类双眼的视觉原理,通过模拟人眼的视觉系统,利用两个相机从不同角度获取同一场景的图像信息,进而计算得到场景中物体的三维结构信息。
其基本原理包括图像获取、图像预处理、特征提取、立体匹配、三维重建等步骤。
三、关键技术研究1. 图像获取与预处理图像获取是双目视觉三维重建的基础。
在获取图像时,需要保证两个相机的参数一致,以减小后续处理的难度。
预处理阶段主要包括图像去噪、灰度化、二值化等操作,以提高图像的质量,为后续的特征提取和立体匹配提供良好的基础。
2. 特征提取特征提取是双目视觉三维重建的关键步骤之一。
通过提取图像中的特征点,可以减小立体匹配的计算量,提高匹配的准确性。
目前常用的特征提取方法包括SIFT、SURF、ORB等。
这些方法可以在不同的尺度、旋转和光照条件下提取稳定的特征点,为后续的立体匹配提供可靠的基础。
3. 立体匹配立体匹配是双目视觉三维重建的核心步骤。
其目的是在两个相机的视图中找到对应的特征点,从而计算视差图。
视差图反映了场景中各点在两个相机视图中的位置差异,是计算三维结构信息的基础。
目前常用的立体匹配方法包括基于区域的匹配、基于特征的匹配和基于全局优化的匹配等。
这些方法各有优缺点,需要根据具体的应用场景选择合适的匹配方法。
4. 三维重建三维重建是根据视差图和相机参数计算场景中物体的三维结构信息的过程。
常见的三维重建方法包括深度图法、三角测量法等。
深度图法通过计算视差图与深度信息之间的关系得到深度图,进而得到物体的三维结构信息。
三角测量法则是通过两个相机的位置和视角信息,结合视差图计算得到物体的三维坐标信息。
双目立体视觉问题
双目立体视觉问题2008-10-30 20:24双目立体视觉的研究一直是机器视觉中的热点和难点。
使用双目立体视觉系统可以确定任意物体的三维轮廓,并且可以得到轮廓上任意点的三维坐标。
因此双目立体视觉系统可以应用在多个领域。
现说明介绍如何基于HALCON实现双目立体视觉系统,以及立体视觉的基本理论、方法和相关技术,为搭建双目立体视觉系统和提高算法效率。
双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。
双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数字图像,或由单摄像机在不同时刻从不同角度获得被测物的两幅数字图像,并基于视差原理恢复出物体的三维几何信息,重建物体三维轮廓及位置。
双目立体视觉系统在机器视觉领域有着广泛的应用前景。
HALCON是在世界范围内广泛使用的机器视觉软件。
它拥有满足您各类机器视觉应用需求的完善的开发库。
HALCON也包含Blob分析、形态学、模式识别、测量、三维摄像机定标、双目立体视觉等杰出的高级算法。
HALCON支持Linux和Windows,并且可以通过C、C++、C#、Visual Basic和Delphi语言访问。
另外HALCON与硬件无关,支持大多数图像采集卡及带有DirectShow和IEEE 1394驱动的采集设备,用户可以利用其开放式结构快速开发图像处理和机器视觉应用软件。
一.双目立体视觉相关基本理论说明1.1 双目立体视觉原理双目立体视觉三维测量是基于视差原理,图1所示为简单的平视双目立体成像原理图,两摄像机的投影中心的连线的距离,即基线距为b。
摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图1所示。
事实上摄像机的成像平面在镜头的光心后,图1中将左右成像平面绘制在镜头的光心前f处,这个虚拟的图像平面坐标系O1uv的u轴和v轴与和摄像机坐标系的x轴和y轴方向一致,这样可以简化计算过程。
左右图像坐标系的原点在摄像机光轴与平面的交点O1和O2。
《2024年基于双目立体视觉定位和识别技术的研究》范文
《基于双目立体视觉定位和识别技术的研究》篇一一、引言随着科技的飞速发展,计算机视觉技术在众多领域中得到了广泛的应用。
其中,双目立体视觉定位和识别技术以其高精度、高效率的特点,在机器人导航、三维重建、无人驾驶等领域中发挥着重要作用。
本文旨在研究基于双目立体视觉的定位和识别技术,探讨其原理、方法及应用领域,以期为相关领域的研究提供参考。
二、双目立体视觉技术原理双目立体视觉技术是通过模拟人眼视觉系统,利用两个相机从不同角度获取同一场景的图像信息,再通过图像处理技术提取出场景的三维信息。
其主要原理包括摄像机标定、图像预处理、特征提取与匹配、三维信息重建等步骤。
1. 摄像机标定摄像机标定是双目立体视觉技术中的重要环节,它旨在确定摄像机的内部参数和外部参数。
内部参数包括摄像机焦距、主点坐标等,外部参数则描述了摄像机与世界坐标系之间的关系。
通过标定,可以获取到摄像机在三维空间中的位置和方向。
2. 图像预处理图像预处理包括灰度化、去噪、二值化等操作,旨在提高图像的质量,以便后续的特征提取与匹配。
其中,灰度化可以将彩色图像转换为灰度图像,降低计算复杂度;去噪可以消除图像中的噪声干扰;二值化则将图像转换为二值图像,便于特征提取。
3. 特征提取与匹配特征提取与匹配是双目立体视觉技术的核心步骤。
通过提取图像中的特征点、线、面等信息,建立场景的三维模型。
特征匹配则是根据提取的特征信息,在两个相机获取的图像之间寻找对应关系,为三维信息重建提供依据。
三、双目立体视觉定位技术双目立体视觉定位技术是利用双目立体视觉系统获取场景的三维信息,实现目标的定位。
其主要方法包括基于特征点的定位方法和基于区域匹配的定位方法。
1. 基于特征点的定位方法该方法首先在两个相机获取的图像中提取特征点,然后通过特征匹配找到对应关系,最后利用三角测量原理计算目标的三维坐标。
该方法具有较高的精度和稳定性,适用于各种复杂环境。
2. 基于区域匹配的定位方法该方法通过在两个相机获取的图像中寻找相同的区域,然后利用区域内的像素信息进行匹配,实现目标的定位。
基于双目视觉的深度图立体匹配算法研究改进
的点即确定了扫描线上特征点的最佳匹配关系。
在具体的匹配过程中,可以引入根据顺序一致性约束条
件,该条件限制了相关系数平面中匹配路径的走向只能在0。 ~90。的范围内,将上式进一步简化为:
V(z,s)一maxEV(x一1,5),V(z一1,s一1),
y(z,s一1),V(z,s一1)l+C(x,5)
(8)
计算机测量与控制·2。譬’16(9)1332
. · .·
文章编号:1671—4598 C2008109—1332—03
Computer Measurement & ControII
中圈分类号:TP301.6
文献标识码:B
r磊i手FI三丽 I瞒,.1似,·o I
基于双目视觉的深度图立体匹配算法研究改进
在区域相关匹配的基础上,这里引入动态规划技术来选择 最优的匹配点。由于用来匹配的图像对事先已经进行外极线校 正,所有外极线等同于水平扫描线,所以匹配点只在对应的扫 描线上寻找,依次对每条水平扫描线上的像点进行匹配。对于 某一条扫描线(如第Y条),取右图扫描线为视差空间图的垂 直坐标轴,取左图扫描线为水平坐标轴,图中位于坐标(z, s)的值等于右图像位于(z,y)的特征点与左图像(s,y) 处的特征点的支持窗口之间的区域相关值,描述右图特征点 (z,y)与左图特征点(s,y)相匹配的程度。在选定视差搜 索范围。一d后,根据前面区域相关匹配的结果,若匹配时采 用的两幅图像宽度均为N,则每一条扫描线上所有特征点的 相关值构成一个N×N矩阵,所以视差空间图像平面也叫相 关系数矩阵平面。由于有视差搜索空间限制,该矩阵中也仅有 有限个元素值不为零。
(b)7 x7窗口 图4互相荧算法
(c)9 x9窗口
4.2引入改进动态规划的匹配算法实验 本实验所用的匹配源图像是立体匹配标准测试图像对,标
基于双目视觉的工件尺寸在机三维测量
.
Abs t r a c t :A s t r a d i t i on a l me a s ur i n g me t ho ds a nd e qu i p me nt c a n n o t me e t t he r e qu i r e me n t of 3 D me a s
( S c h o o l o f Me c h a n i c a l a n d Au t o mo t i v e En gi n e e r i n g,S o u t h Ch i n a Un i v e r s i t y o f
Te c h no l o gy,Gu an gz ho u 5 1 06 4 0,Chi n a)
基 于 双 目视 觉 的 工 件 尺 寸 在 机 三 维 测 量
全燕鸣 , 黎淑梅, 麦青群
( 华南理工大学 机械与汽车工程学院, 广东 广J , i 1 5 1 0 6 4 0 )
摘要: 由于 传 统 测 量 方 法 及 仪 器 设 备 无 法 满 足 在 机 实 时检 测 工 件 三 维 尺 寸 的要 求 , 本 文 基 于 双 目立 体 视 觉 视 差 原 理 , 搭
ur e me n t o f wo r kpi e c e di me n s i o ns on — ma c hi n e i n r e a l — t i me。a n o n— ma c hi ne 3 D vi s i o n me a s ur i n g s y s t e m b a s e d o n t he pr i n c i pl e o f b i no c ul a r s t e r e o v i s i on wa s e s t a b l i s he d t o wor k a t t h e wor ks ho p.Fi r s t l y,A s t e r e o vi s i o n s ys t e m c a l i br a t i on m e t ho d b y us i n g a pl a ne c a l i br a t i on pl a t e wa s i nt r o du c e d . The n, t h r e s hol d s e g me nt a t i o n a l g or i t hm wa s u s e d f or r e c og ni z i n g a n d e xt r a c t i n g t h e wo r k pi e c e f r om t he b a c k gr o un d a nd t he Ca nny op e r a t or a n d po l y go na l a p pr ox i ma t i on me t h o d we r e us e d f o r e x t r a c t i ng t he wo r kp i e c e c o nt ou r a n d t h e c on t o ur f e a t u r e po i n t s . Fu r t he r mo r e a c c o r di n g t o t he ma t c hi ng a l g or i t h m
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于双目立体视觉的动态体积测量系统王畅1,赵彩霞2,韩毅11. 长安大学汽车学院,陕西西安(710064)2. 长安大学电控学院,陕西西安(710064)E-mail :wangchang0905@摘要:以双目立体视觉为基础,设计了一种动态体积测量系统。
系统主要应用于粉末状药物的流散性分析。
系统中采用三台数字式CCD 摄像机对被测物进行图像采集,利用Visual C++.net以及OpenGL 对测量过程中所得到图像进行三维重构,还原物体的三维形状,同时得到在每个测量时刻药堆的体积, 实现了对药堆的连续非接触式测量。
关键词:双目立体视觉;非接触式测量;三维重构中图分类号:TP29 文献标识码:A1. 引言药品生产过程中,药物的流散性直接影响到药品自动压装的生产工艺。
本文设计了一种用于动态测量粉末状药物体积的非接触式测量系统,通过药堆体积随时间增长的关系曲线来判断药物的流散性能。
系统模拟药品的填装过程,采用一个玻璃漏斗,下面安装一个透明量杯。
药品从漏斗下落时,安装在量杯周围的摄像机对量杯底部的药堆进行实时图像采集,通过图像处理及三维重构得到采集过程被测对象的形状和体积。
2. 系统构成系统的主要测量对象是粉末状药物或者其他粉末状物质,在药物下落过程中,药堆的体积不断增长。
系统中的三台数字摄像机从三个不同角度对药堆进行图像采集,对采集到的图像进行三维重构后得到特定时刻序列上的三维形状及体积。
图1是系统的组成图。
图1:系统组成图2.1计算机系统中采用两台计算机分工协作,一台用于控制系统的工作,另外一台用于图像处理及三维重构。
三维重构对计算机的性能有很高的要求,特别是对CPU 的运算速度和内存大小有很高要求。
对三幅图像进行三维重构时运算量非常大,普通计算机运算起来耗时长,以Pentium 4,2.6G 的CPU ,512MB 内存进行运算时需要5分钟左右,同时容易造成死机。
为了提高处理速度以及稳定性, 图像处理计算机采用了Intel Corel Q6600四核处理器,主频为2.4G ,内存大小为4G 。
用该计算机对一帧图像进行重构只需5秒左右。
2.2摄像机系统与普遍应用的图像采集系统不同,本系统中没有采用图像采集卡采集图像。
系统中所选用的摄像机是数字式的,三台数字式摄像机输出数字图像,经千兆以太网交换机与计算机的千兆网卡相连。
系统中采用德国BASLER scA1000-30gm数字式黑白摄像机。
该摄像机采用3/1〞SONY CCD芯片,分辨率为1034×779,采集频率为30帧每秒。
摄像机内置了千兆以太网输出端口,使用六类网线进行数据传输时,传输速率能够达到320MB/s,在采集速度为30帧每秒的情况下能够很好的满足系统要求。
摄像机镜头采用computar M1214-MP 2/3〞镜头,焦距为12mm ,手动调节光圈。
系统中的三台摄像机在空间以120°对称安装,摄像机俯拍角度为18.4°,镜头离地高度为175mm 。
图2是单个摄像机的安装示意图。
图2:摄像机安装示意图2.3同步外触发三维重构要求原始图像是在同一时刻对被测对象从三个不同方向采集得到的,因此,为了保证三个摄像机的采集时刻保持一致,需要引入同步触发信号。
系统中,自行设计开发了基于555定时器的同步信号触发器,该触发器输出信号的频率在1MHZ 到31MHZ 范围内可调,通过改变可变电阻R w 的值可以实现触发信号频率的调节。
图3是同步信号触发器的电路原理图。
图3:同步信号触发器电路原理图3. 图像采集系统工作时,被测药物从量杯上方下落至杯底,在杯底逐渐堆积成长。
在这个过程中,系统中的三台数字摄像机从空间对称120°方向对药堆进行图像采集,采集速度根据需求可以在1-31帧每秒的范围内调整。
采集到的图像经千兆以太网交换机传输至图像处理计算机,保存在内存中。
图4是图像采集的流程图。
图4:图像采集流程图4. 多目立体视觉多目立体视觉的基础是双目立体视觉。
从多个不同的视角方向对同一物体进行拍摄,利用空间几何成像原理构造出物体不同位置之间的差异,获取物体的立体信息[1]。
具体的实现办法是采用多台性能,参数完全一样的摄像机,将摄像机固定在预先设计的位置,然后由摄像机对被测物进行图像采集。
多目立体视觉主要有以下几个步骤[2]。
4.1图像采集系统设计时,考虑到需要精确测量药堆体积,因此采用三台摄像机从三个不同方向对被被测物进行拍摄,三个摄像机相互组成三个处理单元,每个处理单元利用双目立体视觉原理对被测物进行处理。
在三维重构阶段将三个部分按照空间120°夹角关系进行组合,将被测物体还原。
图5是利用双目立体视觉原理,采用三台摄像机进行图像采集的示意图。
图5 图像采集示意图4.2摄像机标定摄像机标定的目的是确定被测物体在空间坐标系和计算机坐标系中的相互关系。
在测量过程中,这种相互关系通过坐标变换来完成。
对于空间某一点,摄像机标定的过程是得到该点在计算机坐标系中的坐标。
从被测物的三维世界坐标(Xf , Yf , Zf 到计算机图像坐标(x,y 的变换过程如下[3]:1. 从物体三维世界坐标(Xf , Yf , Zf 到摄像机三维坐标(a,b,c的变换。
f f f X ab S Y Qc Z ⎡⎤⎡⎤⎢⎥⎢⎥=•+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦ (1其中,S 为3 ×3的旋转变换矩阵,Q 为3 ×1的平移矢量。
2.摄像机三维坐标(a,b,c在理想的小孔成像模型下经投影变换至图像坐标(Xv ,Y v 。
v a X fc= v b Y f c = (2) 3.考虑摄像机透镜的径向畸变因素,将理想图像坐标(Xv ,Y v 转换成实际图像坐标(Xd ,Y d 。
21(1 d v X X kr −=+21(1 d v Y Y kr −=+ (3其中r =表示图像中心O i 到实际图像坐标(Xd ,Y d 的距离;k 表示透镜径向畸变系数。
4.实际图像坐标(Xd ,Y d 到计算机图像坐标(x,y 的变换:0d x x X N u =+0d y y Y N v =+ (44.3三维重构由左右两台摄像机采集被测物体在同一时刻的两幅图像,得到左,右两组坐标值。
将摄像机的内,外参数值和左,右坐标值代入式(1,联立两方程,求得物体各点的世界坐标(Xf , Yf , Z f 。
得到各点的世界坐标后,利用OpenGL 三维物理引擎实现物体的三维重建[4]。
在Visual C++.net开发环境下采集物体各点的三维坐标值,然后调用OPENGL 软件中的点绘制命令GL_POINTS来绘制三维点,在事先设计好的正方体空间中进行物体的三维重构。
测量系统需要测量堆积物的体积,在三维重构时采用了雕刻算法。
雕刻算法是指模拟雕刻过程,在正方体内对每个像素点进行运算,如果该点在实际图像中没有对应点,那么认为该点是空的,因此将该点去除。
对整个正方体运算完成之后得到的就是物体重构出来的三维图像,如图6所示。
a. 原始图像b. 重构图像图6:原始图像及三维重构图像5.体积计算三维重构完成之后,控制程序将统计正方体内有效像素的个数[5]。
程序中所采用正方体的边长为100mm ,正方体体积为1000cm 3。
图像采集时,去除边缘的无用像素,将采集分 辨率设置为 700×700×700,则在三维重钩图像中每个像素所代表的体积为 2.91545×10-3 mm3。
统计三维重钩图像中的有效像素点的个数,将个数乘以单个像素的体积得到被测物体的体积,精度为 1×10-3 mm3。
图像采集过程一般在 30s 左右,将采集到的图片保存在计算机内存中,然后以帧为单位进行三维重钩和体积计算[6]。
体积和时间的关系曲线如图 7 所示。
图 7 体积与时间关系曲线图 6. 结论本系统利用双目立体视觉原理,通过图像采集的方式实现了对被测物体的非接触式测量。
系统主要用于对无固定形状粉末状物质的动态体积测量。
通过动态的体积测量能够得到被测物体流散性能的相关参数,引入质量之后还能得到物体的密度信息,在医药,建筑,军工行业有很好的应用前景。
系统的主要参数如下:采集速度:1-30 帧/秒图像采集最大分辨率:1034×779 三维重构速度:5s/帧体积计算精度:1×10-3 mm3 体积测量误差:≤2% [7] -6- 参考文献 [1].任晨丽,仲思东.小视场多目立体测量系统的研究[J].计算机工程与应用,2006;08:65-67 [2].隋婧,金伟其.双目立体视觉技术的实现及其进展[J].计算机应用,2004,10:4-6 [3].张可.基于双目立体视觉原理的自由曲面三维重构[D].武汉,华中科技大学,2005;11:18-23 [4].潘萌,曲道奎,徐方等.基于OpenGL 的真空机器人三维图像仿真[J].微计算机信息, 2007,12-2:237-239 [5].李国华,许增朴,于德敏等.基于机器视觉的面包体积及形状测量系统的研究[J]. 天津科技大学学报,2004,03:25-28 [6].Morimoto M, Fujii K.A Portable 3D Scanner Based on Structured Light and Stereo Camera[C] Proceedings of International Symposium on communications and Information technology,Beijing,China: IEEEPress,2005:569-572 [7].邓志东,牛建军,张竞丹.基于立体视觉的三维建模方法[J].系统仿真学报,2007,07:3258-3262 Dynamic Measure System For Bulk Based On Binocular Stereoscopic Vision Wang Chang, Zhao Caixia, Han Yi Chang’an University, Xi’an (700064 Abstract Based on Binocular Stereoscopic Vision, a Dynamic measure system for bulk is established, the main using fields of this system is measure flowability of powder as medicament. Three digital CCD cameras collect the images of the powder, then using Visual C++.net and OpenGL to get the three-dimension shape of objects being measured. This system can get the bulk of powder at each sampling time, it realized non-contact measuring for stack of powders. Keywords: Binocular Stereoscopic Vision; Non-contact measure; Three dimension reconstruction -7-。