水下微光高速摄像系统在潜艇实验中的应用.
饱和潜水系统中的水下光学观测和探测
饱和潜水系统中的水下光学观测和探测水下光学观测和探测是饱和潜水系统中的重要环节和任务之一。
在深海中,光的传播受到水的吸收、散射和折射等因素的影响,使得可见光的传输距离有限。
然而,水下光学观测和探测在许多应用领域中至关重要,如海洋科学研究、水下工程、资源勘探和环境监测等。
因此,为了满足这些需求,饱和潜水系统采用了一系列先进的水下光学观测和探测技术。
一、水下光学观测技术1. 主动光学观测技术主动光学观测技术是指通过发送光源,利用相机或激光扫描来观测和记录水下目标的信息。
其中,相机是最常用的水下观测工具之一。
近年来,随着数码相机和高清晰度相机的发展,相机观测技术在水下光学观测领域得到了广泛应用。
此外,激光扫描技术通过激光束的扫描,可以获取更详细的三维形态信息,对于水下地形的观测和测量有着重要的应用价值。
2. 被动光学观测技术被动光学观测技术是指通过接收自然光或他物体发出的光来观测和记录水下目标的信息。
最常用的被动光学观测技术包括水下摄影和水下望远镜。
水下摄影利用自然光来观测水下景观,可以获得真实而清晰的图像。
水下望远镜则通过光学放大系统来观察水下目标,可以获得更加清晰和详细的观测结果。
另外,红外探测技术也被广泛应用于水下光学观测中,其可以通过探测红外热辐射来获取水下目标的信息。
二、水下光学探测技术1. 激光雷达技术激光雷达技术是对水下目标进行高精度远距离测量的一种先进技术。
激光雷达利用脉冲激光束发射与接收,通过测量激光束传播的时间差来计算水下目标的距离。
激光雷达具有高分辨率、高测量精度和高数据获取速率的优点,广泛应用于水下地形测绘、目标探测和导航定位等领域。
2. 声呐技术声呐技术是使用声波进行水下目标探测和测量的一种常用方法。
声呐利用声波的传播速度和回波的时间来测量水下目标的距离。
声呐具有远距离传播、可穿透性强、适应复杂水域环境等优点,被广泛应用于水下地质勘探、声纳图像生成和水下声学通信等领域。
三、水下光学观测和探测的挑战和发展方向虽然水下光学观测和探测技术在一定程度上满足了饱和潜水系统的需求,但仍然存在一些挑战和问题。
一种中继型水下高速摄像系统
Ab s t r a c t :I n v i e w o f t h e e n v i r o n me n t o f t h e u n d e r wa t e r h i g h — s p e e d c a me r a s u s e r e q u i r e m e n t s ,d e s i g n a s e t o f r e l a y t y p e u n d e r w a t e r h i 曲s p e e d c a m—
摄 像 机, 高 速 摄 像 机 一 般 可 达 到 每 秒 1 o 0 0 ~ l o 0 0 0 帧 的 帧 频 甚 至 更
高。水下高速摄像机是将高速摄像机安装在带耐水压透光玻璃密封
装置 中,用 于研 究水 下高速 运动 的物体 川 。
I 竺 竺 灯 l ! H竺 竺 :
I 把F 高 速 摄 像 机
3 应 用 效果
e r a s y s t e m ba s e d o n he t HUB, a nd e r t he e fe c t o f s y ne hr o n o us s i g na l ,t h e g ua r a n t e e 3 wa y u nd e w a r t e r h i g h . s p e e d c a me r a s Li n g Mi a o u ni i f e d da t a
接 , 中间连 接接 头较 多 ,以太 网信 号衰减 较大 ,通 信及 数据 传输 质 量 太差 ,所 以在 电缆绞 车 中增加 一 中继 型H U B,增强 以太 网传输 信
当前对 水下 高速 运动 的物 体分析手段还 比较匮 乏,水下高速摄 像 系统是一种 有效的析 手段 。本 文通过水 下高速系统 的研究 ,设计 出
一种中继型水下高速摄像系统

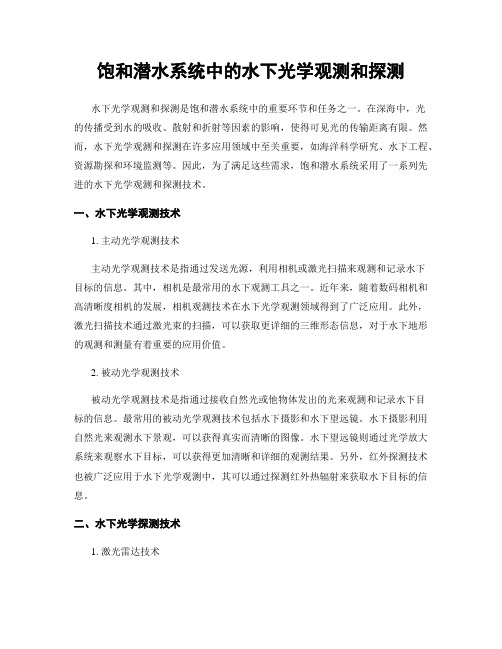
一种中继型水下高速摄像系统卢海洋【摘要】针对水下高速摄像机使用的实际环境需求,设计了一套基于HUB的中继型水下高速摄像系统,在同步信号作用下,保证3路水下高速摄像机的数据记录零秒统一.有效解决以太网长距离传输信号不太稳定问题和不同摄像机的数据记录同步问题.【期刊名称】《电子世界》【年(卷),期】2018(000)001【总页数】2页(P156,158)【关键词】水下高速摄像机;同步;中继;信号传输【作者】卢海洋【作者单位】中国船舶重工集团公司第七一○研究所【正文语种】中文0 引言高速摄像机是一种可以很高帧频对物体的运动影响进行拍摄的摄像机,高速摄像机一般可达到每秒l000~1000O帧的帧频甚至更高。
水下高速摄像机是将高速摄像机安装在带耐水压透光玻璃密封装置中,用于研究水下高速运动的物体[1]。
本文研究的中继型水下高速摄像系统是将4台水下高速摄像机集成在一起,用于研究分析水下高速运动的物体。
由于水下高速摄像机基于以太网,并带有较长的水密电缆和电缆收放绞车,网络传输数据量较大时通信不太稳定,在电缆收放绞车中增加中继型路由器,增强数据传输稳定性和传输质量[2]。
1 主要存在的问题当前对水下高速运动的物体分析手段还比较匮乏,水下高速摄像系统是一种有效的分析手段。
本文通过水下高速系统的研究,设计出一套体积小、实时传输记录水下高速摄像系统,有效解决了水下高速运动物体的运动分析难题,让水下高速运动物体的研究可视化[3]。
2 系统实现的功能及设计方案系统实现的功能:接收到拍摄触发信号后,从三个不同的维度实现水下高速运动物体的拍摄记录。
水下高速摄像系统包括3组水下高速摄像装置、3台电缆绞车、水面控制柜、计算机等组成,原理框图如图1所示。
每组水下高速摄像装置包括1台高速摄像机、3台水下照明灯、3台整流器、3台设备安装架。
安装架用来安装水下高速摄像机、水下照明灯和整流器。
[1]图1 水下高速摄像系统原理图每组高速摄像装置与水面控制台之间通过一根水密电缆连接,中间通过电缆绞车连接。
国产潜艇ROUV
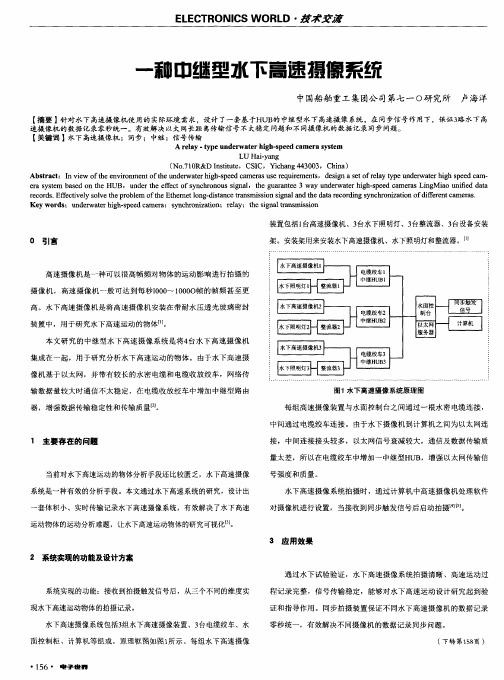
中国曌熠潜艇研究所高速科研潜艇红旗系列潜艇ROV或ROUV(Remotely Operated Underwater Vehicle)工作水深:最大水深500米速度:最大行进速度40节动力:四台深水推进器或四台泵喷推进系统(无人型)四台集成电机泵喷推进器(载人型)航程:无人型10节最大航程220公里(载人型采用燃料电池+柴油动力,最大航程2200海里)负载:无人型最大支持200公斤负载导航:捷联惯性导航+全球定位导航系统(北斗+GPS),并可以随意修正航向通信:低频无线电、水声通信、北斗通信、卫星通信噪声:低于60分贝,锂电池(或燃料电池驱动)控制:自主前进,人工遥控控制,海底地形地貌匹配导航。
太阳光蓝绿光谱导航系统。
输出:可以通过不同的负载设备实现不同的功能选件::水下摄像机、侧扫声纳、水下合成孔径声纳,拖曳线列阵声纳水下机器人(微型潜艇)应用:1.海洋科学考察,水下科研摄像,拍照;获取的海底矿藏资料非常精确。
海底火山活动观察、监视、布防和回收仪器;海底采样以及进行各种生物学、水文学研究。
2.海底资源的开采中,遥控潜艇进行设备的维护和修理,运送必要的器材, 进行现场的监视和测量。
在未来的水下石油生产系统中遥控潜艇设备将起‘操作工人’的作用。
在海洋石油平台导管架检查、管道检查及维护方面也将扮演重要角色。
3。
军事用途:由于遥控潜艇的活动范围广、体积小、重量轻、噪音低、隐蔽性好, 因此在军事上是一种有效的水中兵器, 装载军事设施(客户自己安装)后可以进行远距离投送; 还可以用来侦察对方的水下设施, 监听对方潜艇活动; 用于反水雷, 充当诱饵, 配合反潜训练, 抢险救生等军事活动。
军事用途仅限相关部门自己改进,本产品不具任何军事设备设施。
光学器材在海洋勘测中的应用?

光学器材在海洋勘测中的应用?光学器材在海洋勘测中的应用一、激光测距仪激光测距仪是一种利用光的传播速度测量目标距离的仪器。
在海洋勘测中,激光测距仪被广泛应用于水深测量、地形测量和海底地形图绘制等方面。
激光测距仪利用激光脉冲在空气中以光速传播,并在目标物体上反射后返回装置,通过测量光脉冲传播的时间来确定目标物体与装置之间的距离。
这种测量方法具有高精度、高分辨率和非接触式等优势,适用于各种复杂海洋环境。
二、水下摄像机水下摄像机是一种通过光学传感器记录水下景物的设备。
在海洋勘测中,水下摄像机可以用于观察海底地形、海洋生物群落以及水下环境的变化等。
水下摄像机利用高分辨率的摄像传感器和适应于水下环境的外壳设计,能够在水下捕捉清晰的图像和视频。
通过水下摄像机的应用,海洋勘测人员能够获取大量的原始数据,进一步分析和研究海洋生态系统的变化。
三、浮式激光雷达浮式激光雷达是一种通过发射激光束并接收反射信号来获取目标位置和形状信息的设备。
在海洋勘测中,浮式激光雷达常用于海洋测深、水下地形测绘和海洋定位等方面。
浮式激光雷达具有高精度、快速测量和远程作业等特点。
它通过激光束在水下的传播和反射来获取目标物体的位置和形状信息,可以提供精确的海洋地形数据,为海洋资源开发和海洋环境保护提供支持。
四、水下声纳水下声纳是一种利用声波的传播特性来获取水下信息的设备。
在海洋勘测中,水下声纳可以用于测量水深、探测海底地形和海底构造以及监测水下生态系统等。
水下声纳利用声波在水中的传播速度和反射特性来获取水下目标的位置和形状信息。
它具有高分辨率、适应复杂水下环境和远程探测等优势,在海洋勘测中发挥着重要作用。
五、光学浮标光学浮标是一种将光学传感器与浮标相结合的测量工具。
在海洋勘测中,光学浮标常用于监测海洋环境的变化、海洋生态系统的演变和水下光照条件等。
光学浮标通过携带光学传感器和数据记录仪等设备,能够实时获取海洋环境的多种参数。
光学浮标的设计使得它具有适应复杂海洋环境的能力,并且能够长时间稳定地运行,为海洋勘测提供了重要的数据支持。
潜艇水下高速运动稳定性分析

潜艇水下高速运动稳定性分析潜艇是一种在水下运行的特种舰艇,一般用于海洋探测、战争行动及科学研究等领域。
潜艇在水下高速运动时的稳定性是其关键问题之一,本文将对其稳定性进行分析。
首先,潜艇在水下高速运动时,由于水的密度比空气大,因此水的阻力远大于空气的阻力,这就给潜艇的稳定性带来了挑战。
此外,海水的力学特性也会对潜艇的运动造成影响。
因此,在进行潜艇水下高速运动时,需要充分考虑水的阻力和海水的力学特性,以确保潜艇能够保持稳定。
其次,潜艇在水下高速运动时,需要考虑到其自身特性,如船体的长度、宽度和重量等。
这些特性会影响潜艇在水下高速运动时的稳定性。
比如,船体越长,则对侧向稳定性的影响就越小,而纵向稳定性的影响就越大。
船体越宽,则对侧向稳定性的影响就越大,而纵向稳定性的影响就越小。
船体越重,则对潜艇稳定性的影响就越大。
最后,潜艇在水下高速运动时,需要考虑船体的水动力学特性。
水动力学是研究水的动力学特性及其与物体相互作用的学科。
在进行潜艇水下高速运动时,船体与水的相互作用会产生涡流和水压差,这些力会直接影响潜艇的运动稳定性。
为了降低这些涡流和水压差对潜艇稳定性的影响,需要对潜艇的设计进行适当的优化。
总之,潜艇在水下高速运动时的稳定性是一个非常复杂的问题,需要考虑到多种因素。
在设计和制造潜艇时,需要充分考虑这些因素,以确保潜艇能够在水下高速运动时保持稳定。
为了深入了解潜艇在水下高速运动时的稳定性问题,下面列出一些相关数据并进行分析。
首先,对于潜艇的船体长度和宽度,以某型潜艇为例,其长度为85米,宽度为10米。
这表明其船体较长,对其纵向稳定性的影响较大,而对侧向稳定性的影响较小。
船体宽度在10米左右,对其侧向稳定性的影响比较显著,而对纵向稳定性较小。
其次,对于潜艇的重量,以某型潜艇为例,其总重为5000吨,其中2000吨为浮力。
这表明潜艇的重量较大,对其稳定性有较大的影响。
此外,浮力为2000吨,表明潜艇具有较强的浮力能力,这对其稳定性也有影响。
制成潜水艇的潜望镜的原理
制成潜水艇的潜望镜的原理
潜望镜是一种用于水下观察的光学仪器,用于潜水艇中观察水下环境。
其原理基于光的折射和透射。
潜望镜一般由两个主要部分组成:目镜和物镜。
目镜是用于观察的镜片,物镜则是用于水下观察的镜片。
当光线从水中垂直射入潜望镜的物镜时,由于水的折射率大于空气的折射率,光线会发生折射。
这就导致了光线的传播路径发生了弯曲。
物镜的设计就是为了纠正这一折射,使光线尽量直线传播。
当经过物镜折射后的光线到达目镜时,目镜会将光线再次折射,并将光线聚焦在一个称为焦点的点上。
目镜的设计主要是为了使焦点处的图像清晰可见。
在水下观察时,潜望镜的物镜处于水中,而目镜则位于潜望镜外部。
通过潜望镜的物镜折射和目镜的聚焦,光线被传送到观察者的眼睛,使其能够看到水下环境。
总结起来,潜望镜利用光的折射和透射原理,通过物镜纠正光线的折射,再通过目镜将光线聚焦,以实现水下观察。
潜艇的“耳目”——声呐
潜艇的“耳目”——声呐故。
有专家指出,本来这种相撞的概率很低,两艘潜艇在大洋里游弋,就像一个体育馆里两只蜜蜂飞来飞去,它们如果撞到一起,一定是都没有睁眼睛和带耳朵。
而潜艇的“耳目”就是声呐。
法英很多军事专家就对媒体表示,两艘潜艇相撞很可能与双方关闭了声呐系统相关。
那么,潜艇为何如此依赖声呐呢?声呐是利用水中声波对水下目标实行探测、定位和通信的电子设备,是水声学中应用广泛的一种重要装置。
在水中实行观察和测量,具有得天独厚条件的只有声波,这是因为其他探测手段实现的探测距离都很短。
光在水中的穿透水平有限,即使在最清澈的海水中,人们也只能看到十几米到几十米深的物体;电磁波在水中也衰减很快,而且波长愈短,损失越大,即使用大功率的低频电磁波,也只能准确传递几十米。
不过,声波在水中传递过程中衰减就小得多,在深海中一个几公斤的炸弹爆炸时,两万公里外还能够收到讯号。
在水中实行测量和观察,至今还没有比声波更有效的手段。
潜艇最大的特点是它的隐蔽性,作战时需要长时间在水下潜航,这就决定它不能浮出水面使用雷达观察,而只能依靠声呐实行探测,所以声呐在潜艇上的重要性更为突出。
声呐能够向水中发射声波,声波的频率大多在10kHz~30kHz之间,因为这种声波的频率较高,能够形成较指向性。
声波在水中传播时,如果遇到潜艇、水雷、鱼群等目标,就会被反射回来,反射回来的声波被声呐接收,根据声信号往返时间能够确定目标的距离。
声呐发出声波碰到的目标如果是运动的,反射回来的声波(下称“回声”)的音调就会有所变化,它的变化规律是:如果回声的音调变高,说明目标正向声呐靠拢;如果回声的音调变低,说明目标远离声呐。
请回答以下问题:(1)人耳能够听到声呐发出的声波的频率范围是______kHz到______kHz。
(2)如果停在海水中的潜艇A发出的声波信号在10s内接收到经B潜艇反射回来的信号,且信号频率不变,潜艇B与潜艇A的距离s是。
(设声波在海水中传播速度为1500m/s)(3)在月球上能否用声呐技术来测量物体间的距离?为什么?答案:(1)0.02 20 (2)7500m(3)不能,因为月球是真空,而真空不能传播声音。
水下微光成像系统
文章 编号 : 17 7 4 (0 7 0 0 5 0 D :0 3 0 /.sn 17 7 4 . 0 7 0 . 1 6 2— 6 9 20 ) 6— 0 6— 3 OI 1. 4 4 ji . 6 2— 6 9 2 0 . 6 0 0 s
Und r a e ow i htlv li a i g s se e w trl lg e e m g n y t m
ZHU ixa , Ca . i YAN . o g ,YU e d ,HE J n h a Ya d n W n. e u .u
( . inIst eo pi n r io cais f A , in 706 ,h a 2G aut Sho o C S 1X’ tu f t sadPe s nMeh n SX ’ 0 8C i ; . r a col f A , a n it O c ci c oC a 1 n d e
维普资讯
第2 9卷第 6期
20 0 7年 1 2月
舰
船
科
学
技
术
Vo . 9,No 6 12 . De .,2 0 c 0 7
S I CI H P S ENCE AND TECHNOLOGY
水下微光成像 系统
朱彩 霞 ,闰 亚 东 一, 文 德 何 俊 华 余 ,
(. 1 中国科 学院西安光 学精 密机械研 究所 , 陕西 西安 7 0 6 ; 10 8 2 中 国科 学院研 究生 院 , 京 10 3 ; . 15 . 北 0 0 9 3 9 5 0部 队 2 0所 , 3 北京 16 2 ) 10 3
摘 要 : 介绍了用于水下反恐的水下微光成像系统, 并对设计的关键技术进行了论述。针对系统的微光成像
潜望镜
按目前的技术水平,潜艇综合成像系统基本上由八大类成像系统构成。
下面就依照艇上和艇外成像系统的顺序,分别描述八种成像系统的技术现状和特点。
潜望镜成像系统现代潜艇潜望镜是在20世纪初发明的。
1906年德国海军建成第一艘潜艇时,已使用了相当完善的光学潜望镜,由物镜、转像系统和目镜等组成。
当时潜望镜的潜望力在5~7米,观察距离很近、视场狭窄、图像质量也很差,而且夜间无法使用。
传统潜望镜的主要功能包括观察水面的舰船、对空观察飞机、估算被攻击目标的距离、将其方位和距离提供给火控系统、在潜没状态下实施地标导航或天文导航等。
现代的潜望镜制造商应用微光夜视、红外热成像、激光测距、计算机、自动控制、隐身等光电技术的最新成果,开发出新一代光电潜望镜。
以2003年德国研制的最新一款SERO 400型潜望镜为例。
主要技术性能包括:俯仰范围-15度~+60度,1.5倍、6倍和12倍三种放大倍率,高精度的瞄准线双轴稳定,潜望镜入瞳直径>21毫米,潜望力约12米。
它能配置多种摄像机和传感器,如数码摄像机、微光电视摄像机、彩色电视摄像机、热像仪、人眼安全型激光测距仪等,供潜艇指挥员根据实战需要选用;还能把视频信号实时提供给作战系统监视器,实现同步观察。
潜望镜系统的串行接口可供不同的作战系统控制台实现遥控操作。
该潜望镜系统在昼光和夜间条件下部有相当好的观察效果,能有效监视海面和海空、收集导航数据、搜索和识别各种海上目标,观察到的图像可以录像供回放。
美国海军最近开发的全景潜望镜也值得关注。
它是早期全景潜望镜技术在现代技术条件下的重新应用,技术的前景还在验证中。
此外,国外对潜望镜的模块化设计相当重视而且已广泛采用。
无需改动潜望镜的基本结构和功能,就可以方便地根据需要替换陈旧的传感器,提升潜望镜的性能。
现代光电潜望镜技术已经相当成熟,不可能再有很大提高。
传统的穿透式潜望镜的固有弊端已十分明显:最主要的缺陷是潜望镜必须穿透潜艇壳体,镜管直径越大对潜艇耐压性的影响就越大;其二,潜望镜目镜头的转动直径一般为0 6米,在原本有限的艇内占据较太空间,对潜艇指挥舱的布置十分不利,其三,潜望镜只适合一人操作观察,无法实现多人同时观察,不利于作战信息资源的共享。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第31卷第11期2009年11月舰船科学技术SH I P SC I E NCE AND TECHNOLOGY Vol .31,No .11Nov .,2009水下微光高速摄像系统在潜艇实验中的应用沈凌敏1,2,何俊华1,张琦3,陈良益1(1.中国科学院西安光学精密机械研究所先进光学仪器实验室,陕西西安710119;2.中国科学院研究生院,北京100039;3.中国人民解放军91550部队220所,辽宁大连116023摘要:介绍了用于潜艇实验的水下微光高速摄像系统,并对设计的关键技术做了论述。
根据潜艇上的实际情况,设计了最优的设备工作布局,使全系统能发挥最佳的效果。
分析了水下30~40m 的光照度,进而设计了适合的水下照明方案,尽量采取微光照明的方式,使环境散射达到最低。
最后将该系统应用于水下微光高速摄像试验,实验证明该系统在水下重要武器,尤其是水下潜艇等实验中具有广阔的应用前景。
关键词:高速摄像;水下微光;光照度;水下照明中图分类号:U674.76;T N946文献标识码: A文章编号:1672-7649(200911-0055-04DO I:1013404/j 1issn 11672-7649120091111010Appli ca ti on of underwa ter low 2li ght 2level h i gh 2speed photograph syste m i n sub mar i n eSHEN L ing 2m in1,2,HE Jun 2hua 1,Z HANG Q i 3,CHEN L iang 2yi1(borat ory of Advanced Op tical I nstrument,Xi πan I nstitute of Op tics and Precisi on Mechanics,Chinese Acade my of Sciences,Xi πan 710119,China;2.Graduate I nstitute of Chinese Acade my of Sciences,Beijing 100039,China;3.220I nstitute of 95510A r my of the Chinese P LA ,Dalian 116023,China Abstract:An under water l ow light level i m aging syste m f or submarine trial is intr oduced and s ome key techniques are discussed .According t o the p ractical conditi ons of sub marine an op ti m ized illu m inati on syste m is designed .For the best i m aging quality of under water high 2s peed phot ograph syste m ,by thethor ough analysis of illum inance require ment in both object s pace and i m age s pace f or high sensitive high 2s peed ca mera in the circum stance of l ow light level bet w een 30and 40meter under the water,a p lan app lied t o under water lighting is designed .Some anti 2corr osi on methods are used f or the stability of the syste m.The syste m is app lied in under water l ow light level high s peed detecting and has a wide app licable future in the field of under water weapons,es pecially submarine .Key words:high 2s peed phot ograph;under water l ow 2light 2level;illum inance;under water lighting收稿日期:2009-02-17;修回日期:2009-03-25基金项目:国防科技重点实验室基金项目资助(51448030105ZK1801作者简介:沈凌敏(1983-,男,硕士,研究方向为水下光电探测技术。
0引言随着新武器的不断发展,水下武器发射试验越来越多,水下发射试验已不满足于发射桶口的实况监视,迫切需要对武器出桶的过程进行多角度、大视场、高分辨、更清晰的监控,从而进一步地了解武器发射过程中弹体的运动情况,了解弹体周围环境变化情况。
同时也需要一种能够快速安装在各种实验潜艇上,完成各种武器发射试验任务的新型水下微光高速摄像系统。
目前,高速摄像技术已发展到相当水平,摄像机的分辨率、灵敏度、信号传输性能较前几年已有较大提高,摄像机的体积逐渐减小,存储容量逐渐增加,很多产品已具备一定的长线控制和传输能力,可以满足远程控制水下高速运动目标成像测量系统的要求。
本文研究的主要目标是设计系统在水下潜艇上舰船科学技术第31卷的结构工作布局,分析水下30~40m 左右的光照度条件进而设计合适的照明装置,解决水下微光环境中对高速运动目标光电成像的技术难题,进一步提高系统性能及可靠性,从而为我国水下重大武器试验做出更多贡献。
1水下微光高速摄像系统组成与工作原理水下微光高速摄像系统由水下照明系统、水下成像系统、控制记录与监视系统、信号传输系统、图像处理系统等组成,系统结构框图见图1。
水下照明系统包括水下照明灯、照明灯安装支架、水下照明电源及控制器。
作用是对水下目标进行照明,满足水下高速摄像对光能量的需要;水下成像系统包括水下高速光电成像系统、水下常速光电成像系统、摄像机电源、变焦调焦调光控制器、摄像机控制舱,主要负责完成对潜射导弹发射过程的清晰成像的功能;水下环境测量系统对水下照度、水下深度及摄像机内部温度和湿度进行测量,水下照度、水下深度测量可实时得到水下环境数据,以此作为高速摄像机摄像时摄像机曝光参数和照明灯发光亮度设置依据,摄像机内部温湿度测量可设定报警范围,达到保护摄像机目的;舱内控制、图像存贮及监视系统包括计算机、控制电路及相应的软件及控制箱等,它是整个系统的指挥中心,负责完成系统的初始化、自检、各种参数的设定、控制信号的发出、图像的接收、显示、存储等功能;传输系统包括舱内外的供电、控制、网络传输等传输电缆及相应的插卡和接插件。
供电、控制和信号传输都通过水密封插头和传输电缆进行;图像处理系统包括计算机及相应软件、图像记录设备(硬盘视频录像机、光盘刻录机、便携硬盘,主要完成对所记录图像进行事后分析和资料保存的功能。
图1系统组成框图Fig 11System bl ock diagra m2水下微光高速摄像系统工作布局系统性能的发挥一方面依赖设备本身有良好的特性与功能,另一方面也要依赖设备有良好的布局,所以寻求最优的布局是本系统的关键所在,也是本文的重要任务之一。
舱外设备的布局应由安装潜艇的空间以及任务的要求而决定。
艇外设备的布局如图2所示,高速摄像机1、高速摄像机2与常速摄像机1安装于A 点,高速摄像机3、常速摄像机2、水下深度照度计装于B 点。
2台常速摄像机从2个方向分别监视发射桶。
高速摄像机1与高速摄像机2拍摄方位一致,高速摄像机3从另一方位俯视发射桶。
摄像机在4m 处最大拍摄视场角视场为4m ×315m 。
高速摄像机1与高速摄像机2布置在一起,水平距发射桶中心面4m ,垂直高度为4m 。
2台高速摄像机在垂直方向的布置见图3所示,高速摄像机1向下俯视发射桶,距发射桶底面中心约512m 。
高速摄像机2仰视5°,2台摄像机垂直方向在发射桶中心面有约015m 的重叠,这样2台摄像机的拍摄范围・65・第11期沈凌敏,等:水下微光高速摄像系统在潜艇实验中的应用为4m×615m。
高速摄像机3水平距发射桶中心面4m,垂直高度也为4m,向下俯视发射桶。
照明灯的位置对于成像质量起关键作用,不同的角度对成像质量有较大影响,要求灯尽可能向目标靠近。
图2中照明灯分别装在C和D两点就没有装在P和Q两点好。
布置照明灯还应考虑拍摄视场范围内都有光照,所以照明灯的布置也可能需要视场拼接。
照明灯控制舱布置于照明灯附近,摄像机控制舱布置于摄像机附近。
布置时注意长度方向与潜艇运行方向一致。
3水下微光成像系统设计中的关键技术问题为确保系统能可靠、稳定地工作,系统中采用了一些重要技术,如为系统设计了专用镜头,对水下照明问题进行分析等。
下面对这些关键技术进行论述。
1水下照度估算8~9月晴好天气下,太阳在海面形成的光照度在104lux左右,黄绿光约占可见光的40%。
由于水对光的吸收和衰减,在水下40m的深度时,自然光中只有黄绿光存在。
水下不同深度的光照度可用下面公式进行估算:I=I0e-k(λ・z。
其中,I为水下深度在z处的照度;I为海面的光照度;z为水下的深度;k(λ为水衰减系数,它随波长λ而变化。
如果海水混浊,其透明度小于4m,则同深度的光照度要减少一个数量级。
当然,水下照度也会随太阳位置、云层情况发生变化,所以水下30m处的照度一般条件下为5~20lux,水下40m一般条件下为1~5lux。
2像面照度估算目前,可选用的高速摄像机灵敏度较高,其感光度一般为I S O1000以上,有的高达I S O10000。
下面分别以I S O2000和I S O10000为例计算CCD靶面所需的成像照度。
由感光度I S O的定义:S=018/Hm(S为I S O值,Hm为最低曝光量,得:I S O2000时:H m=018/2000=4×10-4lux・s;I S O10000时:H m=018/10000=8×10-5lux・s。
当系统的拍摄频率为500fp s,曝光时间t=2m s(拍摄机实际允许的曝光时间为1199m s时,可计算出像面所需的照度值为:I S O2000时,E fp=H mt=4×10-42×10-3=012lux;I S O10000时,E fp=H mt=8×10-52×10-3=0104lux。