XY平台直线电机选型
线性电机永磁铁选型设计

线性电机永磁铁选型设计随着现代科技的发展,线性电机已经成为了一个广泛应用的机电一体化系统,它不仅广泛应用于航空航天、军事装备、机床等高端技术领域,而且应用于日常生活中,例如动力门窗、自动化搬运机械等。
而永磁铁是线性电机中至关重要的部件之一,不仅影响着线性电机的工作效率,而且也在很大程度上决定了线性电机的寿命和稳定性。
因此,选择合适的永磁铁是线性电机设计中非常重要的环节。
一、永磁铁的基本原理永磁铁是一种常用于线性电机中的磁性材料,它的磁化强度会随着电流变化而发生变化。
相比于传统的磁铁,永磁铁拥有更高的磁化强度,因此可以提高线性电机的工作效率和性能。
永磁铁通常由NdFeB材料制成,这种材料拥有高的矫顽力和磁能积,可以提供更强的力矩和磁矩,因此越来越受到广泛应用。
二、永磁铁选型的基本原则1、磁力密度磁力密度是表示磁场强度的参数,通常用于评估永磁铁的性能。
选择磁力密度越大的永磁铁可以提供更强的磁力,从而提升线性电机的效率和性能。
2、耐高温性由于线性电机工作时需要产生大量的热量,因此永磁铁的耐高温性是一个非常关键的选型因素。
通常情况下,永磁铁的使用温度范围会在其技术参数中说明,选择符合自己需求的耐高温永磁铁可以提高线性电机的寿命和稳定性。
3、磁能积磁能积是表示永磁铁能够提供的磁化能量大小的参数,是衡量永磁铁性能的重要指标之一。
磁能积越大的永磁铁,可以提供更大的磁力和力矩,从而使线性电机具有更高的效率和更强的承载能力。
三、永磁铁的选型过程1、根据应用场景进行评估首先需要根据线性电机的使用场景以及工作要求进行分析和评估。
例如,如果是需要应用于高强度的工作场合,那么需要选择耐高温、承载能力强且具有较高磁力密度的永磁铁。
反之,如果只是长度短的轻载工作场合,选择低成本的永磁铁即可。
2、选择适合的永磁铁品牌选择合适的永磁铁品牌是非常重要的一步,品牌之间的性能、价格等方面都会存在差异。
可以查看该品牌的生产工艺、质量保证体系以及技术服务水平等方面进行评估,选择符合自己需求的永磁铁品牌。
电机分类与选型方法
电机分类与选型方法电机是现代化工和生活中常用的一种能转换和输送电能的装置。
根据不同的工作原理和结构特点,电机可以分为多种不同的类型。
在进行电机选型时,需要综合考虑电机的工作条件和要求,以确保选择到最佳的电机类型。
一、电机分类1.按工作原理分类:(1)直流电机:直流电机是利用直流电能产生旋转力矩的电机。
直流电机根据励磁方式可以分为永磁直流电机和电磁直流电机。
(2)交流电机:交流电机是利用交流电能产生旋转力矩的电机。
交流电机又可以分为异步电机和同步电机。
2.按结构分类:(1)旋转电机:旋转电机是以旋转方式输出动力的电机,包括直流电机、异步电机、同步电机等。
(2)线性电机:线性电机是以直线运动方式输出动力的电机,包括直线电机和声波电机。
(3)步进电机:步进电机是按一定角度(步距)运动的电机,精度高、静音且没有惯性。
(4)无刷电机:无刷电机是通过电子换相实现的电机,不受换向器限制、寿命长、效率高。
3.按电源类型分类:(1)单相电机:单相电机是通过单相交流电源驱动的电机,使用广泛、安装方便、成本较低。
(2)三相电机:三相电机是通过三相交流电源驱动的电机,功率大、效率高、转矩较稳定。
二、选型方法1.确定工作条件:包括电机工作电压、频率、额定转速、额定功率以及工作环境的温度、湿度等因素。
2.确定负载条件:根据负载类型以及负载特点确定所需的转矩、速度和精度等要求,以确定选择的电机类型。
3.考虑特殊要求:如环境防护等特殊要求,根据工作环境的特点选择合适的电机。
4.比较不同类型的电机:根据所需的工作条件和负载要求,比较不同类型的电机的优势和劣势,选择最合适的电机类型。
5.确定电机尺寸和功率:根据负载条件以及所需的转矩和速度等要求,确定合适的电机尺寸和功率。
6.考虑经济因素:综合考虑电机的价格、维护成本、能源效率等因素,选择经济合理的电机。
7.验证选型:通过实际测试或仿真分析验证选型结果是否满足要求,如需调整则重新选择。
DDR直驱电机选型及常见问题
DDR直驱电机选型及常见问题导语:DDR直驱电机工作平台,利用直线电机或力矩直接驱动工作台,将动子部分的能量直接作用于工作平台上,中间无传动结构,因此避免了传统上获得直线运动的结构方式,如丝杠螺母机构、齿轮齿条机构、皮带驱动结构等DDR直驱电机工作平台,利用直线电机或力矩直接驱动工作台,将动子部分的能量直接作用于工作平台上,中间无传动结构,因此避免了传统上获得直线运动的结构方式,如丝杠螺母机构、齿轮齿条机构、皮带驱动结构等,较易获得高速度、加速度、结构简单、无摩擦、传动效率高等效果,同时可以提供较传统方式高得多的性能指标,如长行程(模块化生产,行程可根据需要任意搭接)、高精度(最大定位精度达纳米级)等特点,适合于传统形式不能解决的长行程、高精度、高速度等精密直线运动的场合。
DDR直驱电机选型要素1.峰值力和持续力DDR直驱电机扭矩必须要符合应用需要,或者说电机的峰值扭矩和持续扭矩要高于应用需要的峰值扭矩和RMS(均方根)扭矩,否则,电机将不能达到所需要的最大加速度,或者有时电机会过热。
其中,直线电机遵照牛顿第二定律:F=ma,F是负载运动需要的力,单位为N;m是运动物体的质量,单位为Kg;a是加速度,单位为m/s2。
同理,对于旋转电机,T=Jα,T是负载选择需要的扭矩,单位是Nm;J是负载的转动惯量,单位Kgm2;α是角加速度,单位为rad/s2(360°=2πrad)。
对于实际应用,可以计算需要的峰值扭矩和RMS扭矩:峰值扭矩取决于加速度/减速度,T=Jα,其中:Ta=加速扭矩Tc=匀速扭矩Td=减速扭矩Tw=停顿扭矩ta=加速时间tc=匀速时间td=减速时间tw=停顿时间电机的选择要基于计算出的峰值扭矩和RMS扭矩。
另外需要增加20-30%的安全系数,特别是假设摩擦力和反向作用力为零时。
雅科贝思提供的电机选型软件,输入相应的应用参数之后,可以自动计算出峰值扭矩和RMS扭矩,并推荐可供选择的电机型号。
直线电机驱动二维精密定位平台的设计研究

基金项 目: 榆林学 院高层次人 才科 研启动基金项 目( 8 K 3 ) 0 G 0 7 作者简 介 : 曹卫锋 (97 ) 男 , 17一 , 陕西 武功人 , 助教 , 在读博 士 , 研究 方 向: 机械设计与制造 的教学 与研 究。
1
Eq i me t u p n Ma ua tig T c n lg . 2 1 n fc r e h oo y No9, 0 2 n
T ANG h - i g , AO Hu - a g , S u yn C i f n MA o q n W ANG e g’ Ru - u , Fn
( . ae t x m n t nC o eai etr f h aet fc B in 0 10C ia 1 P tn E a iai op rt nC ne e t i e ig10 9 ,hn ; o o o T P n O e, j 2 N c a dR da o a t C nr, e ig1 0 8 C ia . ul r n ait nS f y e t B in 0 0 2,hn ) e a i e e j
二维定位平 台总体设计结合 了大范 围超精密定 位系统的技术指标 , 其技术要求如下 : 自由度 : 、 x Y两维 ;
图 1 二 维定 位 平 台 结 构 简 图
在台子 的侧面上 。
收 稿 日期 :0 2 0 - 8 2 1- 6 0 -
重复计算 电机峰值 力和平均连续输 出力 ,校核被选
1 二维定 位平 台的设计
11 总体 设计 .
11. 、7底座导 轨 2上 台 3上 台 电极 动子 4上台输 出部分 5下 台直 . . . . 线 电机 磁轨 6 台光 栅读数头 7下台直线 电机 动子 8 . 上 . . 限位装 机械 置 9 台光栅支架 1 、5 台导 轨 l. . 上 O 1. 上 1 下台光栅支架 1. 台直线 2 上 电机 l . 3 上台光栅读数头 l . 台机械限位 1. 4 上 6 底座
直线电机参数

介绍直线电机参数和选型1.最大电压( max. voltage ph-ph) ———最大供电线电压,主要与电机绝缘能力有关;《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。
》2.最大推力(Peak Force) ———电机的峰值推力,短时,秒级,取决于电机电磁结构的安全极限能力;《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。
》3.最大电流(Peak Current) ———最大工作电流,与最大推力想对应,低于电机的退磁电流;4.最大连续消耗功率(Max. Continuous Power Loss) ———确定温升条件和散热条件下,电机可连续运行的上限发热损耗,反映电机的热设计水准;5.最大速度(Maximum speed) ———在确定供电线电压下的最高运行速度,取决于电机的反电势线数,反映电机电磁设计的结果;6.马达力常数(Motor Force Constant) ———电机的推力电流比,单位N/A或KN/A,反映电机电磁设计的结果,在某种意义上也可以反映电磁设计水平;7.反向电动势(Back EMF) ———电机反电势(系数),单位Vs/m,反映电机电磁设计的结果,影响电机在确定供电电压下的最高运行速度;8.马达常数(Motor Constant) ———电机推力与功耗的平方根的比值,单位N/√W,是电机电磁设计和热设计水平的综合体现;9.磁极节距NN(Magnet Pitch) ————电机次级永磁体的磁极间隔距离,基本不反映电机设计水平,驱动器需据此由反馈系统分辨率解算矢量控制所需的电机电角度;10.绕组电阻/每相(Resistance per phase)———电机的相电阻,下给出的往往是线电阻,即Ph-Ph,与电机发热关系较大,在意义下可以反映电磁设计水平;11.绕组电感/每相(Induction per phase) ———电机的相电感,下给出的往往是线电感,即Ph-Ph,与电机反电势有关系,在意义下可以反映电磁设计水平;12.电气时间常数(Electrical time constant) ———电机电感与电阻的比值,L/R;13.热阻抗(Thermal Resistance) ———与电机的散热能力有关,反映电机的散热设计水平;14.马达引力(Motor Attraction Force) ———平板式有铁心结构直线电机,尤其是永磁式电机,次极永磁体对初级铁心的法向吸引力,高于电机额定推力一个数量级,直接决定采用直线电机的直线运动轴的支撑导轨的承载能力和选型。
课程设计数控立式铣床XY工作台机电系统设计说明书
《机电一体化》课程设计数控立式铳床XY工作台机电系统设计院系:汽车学院专业:机械设计制造及其自动化班级:机电一班组长:雷博文组员:金亮、黄明亮、夏佳、熊秀成指导教师:蒋强目录一、设计目的 (3)二、设计任务 (3)三.总体方案的确定 (4)1、机械传动部件的选择..................................... ••:•. (3)(1) 导轨副的选用 (4)(2) 伺服电动机的选用 (4)(3) 工作台的选用 (4)2、................................................................. 控制系统的设计.. (4)3、................................................................. 绘制总体方案图.. (5)四、.......................................... 直线伺服电机的计算与选型51、.............................................. 导轨上移动部件的重量42、...................................................... 铣削力的计算43、........................................................ 载荷的计算74、............................................................ 初选型号75、............................................ 直线伺服电机可用性验算8五、........................................... 直线滚动导轨副的计算与选型81、直线滚动导轨选择理由 (8)2、直线导轨额定寿命L 的计算和选型 (10)3、光栅尺的选择 (11)4、工作台的选型 (12)六、PLC选型 (13)七、....................................................... 伺服放大器选型18八、控制系统硬件电路设计 (20)结束语 (21)参考文献 (22)一、设计目的课程设计是一个很重要的实践性教学环节,要求学生综合运用所学的理论知识,独立进行设计训练,主要目的:1) 通过本设计,使学生全面地,系统地了解和掌握数控机床得基本组成及其相关基本知识,学习总体方案拟定、分析与比较的方法。
Hiwin最新直线电机力矩电机选型手册技术样本1107版

工業機器人
Single Axis Robot
• KK 半導體、電子化系列 • KS, KA 自動化系列
空氣軸承線性馬達定位 平台
Linear Motor Air Bearing Platform
2008年台灣精品金質獎 2007, 2002年台灣精品銀質獎
線性滑軌 Linear Guideway
HG/EG/RG/MG 系列 精密機械/電子半導體/生技醫療 • E2 環保潤滑模組 • Q1 靜音式 • A1 氣淨式
以下列舉了許多不同的應用案例,不單是機構部分的特殊訂製可 以提供,在某些情形下,我們也可以提供伺服控制的整體解決提 案以達到整體生產過程的最佳化。
1.1 實績案例
合理價格的取放及檢測用龍門定位系統
X Y 龍門架構使得許多應用得以更低的成本來實現,以標準元件 構築而成的龍門定位平台。 採用LMX1L系列的定位軸 重現性±2µm 可提供含底座
微米技術及晶圓處理
在微米工程等級的應用以及晶圓設備中尤其重視絕對精度及 潔淨室適用性。採用線性馬達高精度XY平台為最佳選擇。 行程200 mm x 200 mm, 亦可選購 300 mm x 300 mm 全行程平面度±4µm 各軸重現性±1µm 各軸精度±4µm 潔淨室等級100適用, 亦可選購等級10
另一AOI光學檢測應用, 客戶需求要高性能價格比 534mm × 534mm^2行程 LMS27及LMS13龍門 特殊龍門同動控制 鋼材框架 集成線路板輸送, PLC, IPC於客戶端 次微米級重現性 承諾40mm移動可於200ms內收歛至±1.5μm
4
M99TC04-1005
客製玻璃加工機台
線性馬達機台被設計用來承載工作水頭在平台上方移動, 客戶的工作 水頭用來切割雙層玻璃 同動架構線性馬達定位機台() 1300mm × 1450mm行程 平滑運動 正弦波整流, 無頓力 LMC系列馬達 各軸重現性±2μm 剛性機構底座
直线平台往复运动的步进电机选型
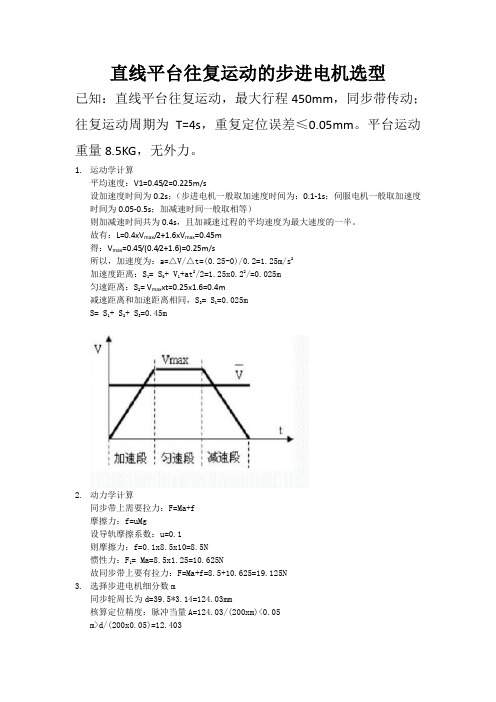
直线平台往复运动的步进电机选型已知:直线平台往复运动,最大行程450mm,同步带传动;往复运动周期为T=4s,重复定位误差≤0.05mm。
平台运动重量8.5KG,无外力。
1.运动学计算平均速度:V1=0.45/2=0.225m/s设加速度时间为0.2s;(步进电机一般取加速度时间为:0.1-1s;伺服电机一般取加速度时间为0.05-0.5s;加减速时间一般取相等)则加减速时间共为0.4s,且加减速过程的平均速度为最大速度的一半。
故有:L=0.4xV max/2+1.6xV max=0.45m得:V max=0.45/(0.4/2+1.6)=0.25m/s所以,加速度为:a=△V/△t=(0.25-0)/0.2=1.25m/s2加速度距离:S1= S0+ V1+at2/2=1.25x0.22/=0.025m匀速距离:S2= V max xt=0.25x1.6=0.4m减速距离和加速距离相同,S3= S1=0.025mS= S1+ S2+ S3=0.45m2.动力学计算同步带上需要拉力:F=Ma+f摩擦力:f=uMg设导轨摩擦系数:u=0.1则摩擦力:f=0.1x8.5x10=8.5N惯性力:F1= Ma=8.5x1.25=10.625N故同步带上要有拉力:F=Ma+f=8.5+10.625=19.125N3.选择步进电机细分数m同步轮周长为d=39.5*3.14=124.03mm核算定位精度:脉冲当量A=124.03/(200xm)<0.05m>d/(200x0.05)=12.403核算最大转速:n max= V max/d=0.25/(124.03/1000)=2.1r/s显然,细分数不合适太大,转速太低。
加减速机速比1:3m>d/(200x0.05/i)=12.403/3=4.14电机最大转速n max= 3xV max/d=3*0.25/(124.03/1000)=6.3r/s细分数选择6,转速合适。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、X方向直线电机选型:
X行程:300mm
Z轴负载(喷头):3Kg
X最大速度:1m/s
X最大加速度:1g
我们选择直线电机水平布局。
直线电机受力模型如下:
有如下方程:
F f=(G+F r)μ
G=mg
N=F r+G
ma=F−F f
m——移动部件的总质量(kg);
g——重力加速度(m/ s2 );
F r——定子与动子间的垂直吸引力(N);
F f——摩擦阻力
F ——牵引力
μ——导轨的摩檫系数。
a——进给运动的加速度(m/ s2)。
因为打印时,行程通常较短,所以直线电机运动速度——时间曲线为三角形。
按有铁心的直线电机估算。
一些参数的估计:
移动部件总质量:喷嘴模块(3KG)+电机动子及导轨相应负载(7KG).
摩擦系数取0.004
F f=(G+F r)μ=(10×9.8+800)×0.004=3.6N
启动时,所需最大推力值
F max1=F f+ma max=3.6+10∗9.8=101.6N
制动时,所需最大推力值
F max2=ma max −F f =10∗9.8−3.6=94.4N
匀速时,额定推力值(匀速时间为0)
F c =F f =3.6N
则系统均方根有效推力值为:
F =√F max12×t 1+F max22∗t 2t 1+t 2
=98N
● 按无铁心的直线电机估算
F r =0
G 会小些取G=75N
F f =(
G +F r )μ=(75+0)×0.004=0.3N
启动时,所需最大推力值
F max1=F f +ma max =0.4+7.5∗10=75.4N
制动时,所需最大推力值
F max2=ma max −F f =75∗10−0.4=74.6N
则系统均方根有效推力值为:
F =√F max12×t 1+F max22∗t 2t 1+t 2
=75N 二、
Y 轴电机计算:
Y 行程:200mm
总负载:12kg
Y 最大速度:1m/s
Y 最大加速度:1g
同上
● 按有铁心的直线电机估算。
一些参数的估计:
移动部件总质量:12KG.
摩擦系数取0.004
F f =(
G +F r )μ=(10×12+800)×0.004=3.68N
启动时,所需最大推力值
F max1=F f +ma max =3.68+10∗12=123.7N
制动时,所需最大推力值
F max2=ma max −F f =10∗12−3.6=116.3N
匀速时,额定推力值(匀速时间为0)
F c =F f =3.6N
则系统均方根有效推力值为:
F =√F max12×t 1+F max22∗t 2t 1+t 2
=120N
按无铁心的直线电机估算时,变化不大.。