基于SVPWM过调制的超前角弱磁控制永磁同步电机的策略研究
基于SVPWM的永磁同步电机控制器设计
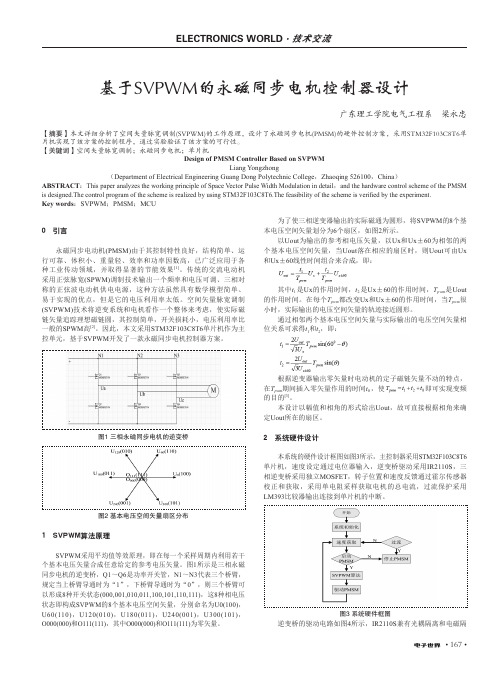
• 167•基于SVPWM的永磁同步电机控制器设计广东理工学院电气工程系 梁永忠【摘要】本文详细分析了空间矢量脉宽调制(SVPWM)的工作原理,设计了永磁同步电机(PMSM)的硬件控制方案,采用STM32F103C8T6单片机实现了该方案的控制程序,通过实验验证了该方案的可行性。
【关键词】空间矢量脉宽调制;永磁同步电机;单片机Design of PMSM Controller Based on SVPWMLiang Yongzhong(Department of Electrical Engineering Guang Dong Polytechnic College ,Zhaoqing 526100,China )ABSTRACT :This paper analyzes the working principle of Space Vector Pulse Width Modulation in detail ,and the hardware control scheme of the PMSM is designed.The control program of the scheme is realized by using STM32F103C8T6.The feasibility of the scheme is verified by the experiment.Key words :SVPWM ;PMSM ;MCU0 引言永磁同步电动机(PMSM)由于其控制特性良好,结构简单、运行可靠、体积小、重量轻、效率和功率因数高,已广泛应用于各种工业传动领域,并取得显著的节能效果[1]。
传统的交流电动机采用正弦脉宽(SPWM)调制技术输出一个频率和电压可调、三相对称的正弦波电动机供电电源,这种方法虽然具有数学模型简单、易于实现的优点,但是它的电压利用率太低。
空间矢量脉宽调制(SVPWM)技术将逆变系统和电机看作一个整体来考虑,使实际磁链矢量追踪理想磁链圆,其控制简单,开关损耗小,电压利用率比一般的SPWM 高[2]。
永磁同步电机弱磁调速的研究
DOI :10.19392/j.cnki.1671-7341.201920174永磁同步电机弱磁调速的研究睢丙东韩伟河北科技大学河北石家庄050000摘要:永磁同步电机弱磁调速是现代电机研究的热点之一,解释永磁同步电机传统的弱磁控制原理,研究分析传统弱磁调速的主要缺陷及限制调速范围的因素。
阐述弱磁调速的研究现状以及总结研究的新动向。
关键词:永磁同步电机;弱磁调速;调速范围现代永磁同步电机因为具有高转矩密度、高效率、较为优秀的低速驱动性能以及较宽的调速范围,已经被广泛的应用于电动汽车的驱驱动中。
永磁同步电机调速系统大多由直流电源、逆变器、控制器和电机组成。
但是永磁同步电机励磁所采用的稀土永磁体,磁场不能被调节,因而需要采用弱磁控制的方法来提高转速。
当电机输出功率一定,在低转速时扭矩的提高必然带来额定转速的降低,此时需要弱磁调速控制,如果保持最高转速且稳定,则弱磁调速的范围也随之提高。
因此对弱磁调速能力的研究对提升整个永磁同步电机控制系统的性能有着重要意义。
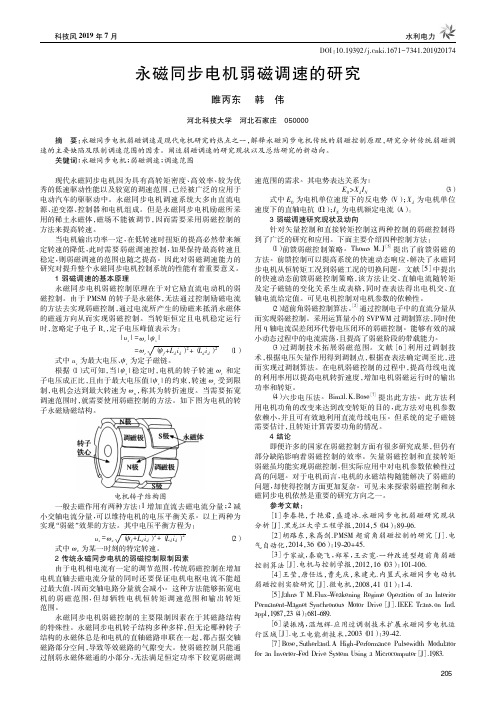
1弱磁调速的基本原理永磁同步电机弱磁控制原理在于对它励直流电动机的弱磁控制。
由于PMSM 的转子是永磁体,无法通过控制励磁电流的方法去实现弱磁控制,通过电流所产生的励磁来抵消永磁体的磁通方向从而实现弱磁控制。
当转矩恒定且电机稳定运行时,忽略定子电子Rs ,定子电压峰值表示为:|u s |=ωr |ψs |=ωr (ψf +L d i d )2+(L d i d )槡2(1)式中u s 为最大电压、ψs 为定子磁链。
根据(1)式可知,当|ψs |稳定时,电机的转子转速ωr 和定子电压成正比,且由于最大电压值|ψs |的约束,转速ωr 受到限制,电机会达到最大转速为ωn ,称其为转折速度。
当需要拓宽调速范围时,就需要使用弱磁控制的方法。
如下图为电机的转子永磁励磁结构。
电机转子结构图一般去磁作用有两种方法:1增加直流去磁电流分量;2减小交轴电流分量,可以维持电机的电压平衡关系。
基于SVPWM算法的永磁同步电机闭环控制
有下面的公式:
图1.2 静止 DQ 轴系与同步旋转 dq轴系
(1.5)
由静止(ABC)坐标轴系到静止(αβ)坐标轴系的变换只完成了由三相到两相的 “相数变换”,而静止(αβ)坐标轴系到同步旋转(dq)坐标轴系的变换是一种 “频率变换”。在直流电动机中,电枢绕组中的交流电流是通过换向器和电刷变成直 流电的。而式 1.4 和式 1.5 所起到的作用也相当于换向器的作用,经过这两种变换 最终将交流永磁同步电机等效为直流电机,使其的控制性能有了很大的提升。
永磁同步电机伺服控制系统
目录
一、永磁同步电机矢量控制系统
1.1 永磁同步电机的结构和数学模型 1.2 永磁同步电机矢量控制基本原理
二、永磁同步电机的 SVPWM 控制
2.1 空间矢量调制理论 2.2 SVPWM算法程序实现
三、永磁同步电机双闭环控制系统
3.1 矢量控制系统结构
一、永磁同步电机矢量控制 系统
2.1 空间矢量调制理论
在理想的供电情况下,定子相电压为三相平衡正弦电压时,三相电压 合成矢量us是一个以电源角频率ωs为角速度作恒速旋转的空间矢量,它
的幅值是相电压幅值的 3 2倍,当某一相电压为最大值时,三相电压
合成矢量us就将与该相的轴线重合。当电动机转速稳定的时候,定子电 流的空间矢量is和磁链的空间矢量Ψs的幅值恒定,以电源角频率ωs为 电气角速度在空间作恒速旋转。
②计算T1、T2、T0,即计算扇区内相邻两电压矢量及零矢量各自的作用 时间
③计算逆变器开关状态切换点Tcm1、Tcm2、Tcm3 SVPWM脉宽调制是用等效的时间三角波来跟Tcm1、Tcm2、Tcm3比较,
当两 者的值相等时,逆变器开关状态就会改变。从而产生正确PWM波形,用
基于SVPWM的永磁同步电机控制系统的仿真.

基于SVPWM的永磁同步电机控制系统的仿真随着电动机在社会生产中的广泛应用,由于永磁同步电机具有结构简单、体积小、效率高、转矩电流比高、转动惯量低,易于散热及维护等优点,特别是随着永磁材料价格的下降、材料的磁性能的提高、以及新型的永磁材料的出现,在中小功率、高精度、高可靠性、宽调速范围的伺服控制系统中,永磁同步电动机引起了众多研究与开发人员的青睐,其应用领域逐步推广,尤其在航空航天、数控机床、加工中心、机器人等场合已获得广泛的应用。
我国制作永磁电机永磁材料的稀土资源丰富,稀土资占全世界的80%以上,发展永磁电机具有广阔的前景。
第一章永磁同步电机的矢量控制原理1.1 永磁同步电机控制中应用的坐标系交流电机的数学模型具有高阶次,多变量耦合,非线性等特征,难以直接应用于系统的设计和控制,与直流电机单变量,自然解耦和线性的数学模型相比较,交流电机显得异常复杂。
因此需要通过适当的转换,将交流电机的控制变换为类似直流电机的控制将大大简化交流电机控制的复杂程度。
永磁同步电机矢量控制的基本思想是把交流电机当成直流电机来控制,即模拟直流电机的控制特点进行永磁同步电机的控制。
为简化感应电机模型,可将电机三相绕组电流产生的磁动势按平面矢量的叠加原理进行合成和分解,使得能够用两相正交绕组来等效实际电动机的三相绕组。
由于两相绕组的正交性,变量之间的耦合大大减小。
1.1.1系统中的坐标系1)三相定子坐标系(U-V-W坐标系)其中三相交流电机绕组轴线分别为U、V、W,彼此之间互差120度空间电角度,构成了一个U-V-W三相坐标系。
空间任意一矢量在三个坐标上的投影代表了该矢量在三个绕组上的分量。
2)两相定子坐标系(α-β坐标系)两相对称绕组通以两相对称电流也能产生旋转磁场。
对于空间的任意一矢量,数学描述时习惯采用两相直角坐标系来描述,所以定义一个两相静止坐标系,即α-β坐标系。
它的轴α和三相定子坐标系的A轴重合,β轴逆时针超前α轴90度空间电角度。
一种过调制算法及其在永磁同步电动机弱磁控制中的应用

一种过调制算法及其在永磁同步电动机弱磁控制中的应用过调制是一种在永磁同步电动机中用于弱磁控制的算法。
该算法通过在电流控制回路中引入过调制技术,可以在磁通极度减弱的情况下仍保持较高的动态响应性能和较高的功率因数。
本文将介绍过调制算法的原理和应用。
过调制算法的原理基于永磁同步电动机的特性。
永磁同步电动机可以通过调节电流矢量的幅值和相位来实现电机控制。
传统的矢量调制算法在磁通减弱较多的情况下,容易导致电流矢量失真和磁通损耗增大。
为了解决这个问题,过调制算法引入了超调电压信号,并在电流矢量控制回路中引入了超调控制器。
过调制算法的基本思路是通过超调电压信号改变电流矢量幅值和相位,使电机具有更好的响应性能和功率因数,同时减小磁通损耗。
具体来说,当磁通较弱时,通过增大电流矢量的幅值和改变相位,可以提高电机的转矩和降低电机的电磁启动时间。
同时,在电流矢量较小的区域,过调制算法可以提高电机的效率和功率因数。
因此,过调制算法可以有效地解决永磁同步电动机在弱磁运行条件下性能下降和功率因数恶化的问题。
过调制算法的应用主要集中在永磁同步电动机的弱磁控制中。
在传统的弱磁控制方法中,电机容易产生振荡、响应滞后、转矩下降等问题。
过调制算法通过引入超调电压信号和超调控制器,可以减小这些问题,并保持电机的高动态响应性能和高功率因数。
同时,过调制算法还可以减小电机的磁通损耗,提高电机的效率。
在实际应用中,过调制算法可以通过改变超调电压信号的幅值和频率来实现不同的控制效果。
具体来说,当电机处于弱磁工况时,可以适当增加超调电压信号的幅值,从而提高电机的转矩响应和动态性能。
当电机处于负载工况时,可以降低超调电压信号的幅值,以减小电机的磁通损耗和提高效率。
总之,过调制算法是一种在永磁同步电动机弱磁控制中应用的有效方法。
该算法通过引入超调电压信号和超调控制器,可以在磁通减弱的情况下仍保持电机的高动态响应性能和功率因数。
在实际应用中,过调制算法可以根据不同的工况需求来调节超调电压信号的幅值和频率,从而实现不同的控制效果。
永磁同步电机的空间矢量脉宽调制(SVPWM)原理及仿真研究

- 41 -
永磁同步电机的空间矢量脉宽调制(SVPWM)原理及仿真研究
作者: 作者单位: 刊名: 陈娜, 李杨声, 李福瑞, 王程勇 湖北三江航天红峰控制有限公司,湖北 孝感,432001 科技创新与应用
英文刊名: 年,卷(期):
科技创新与应用
永磁同步电机的空间矢量脉宽调制 (SVPWM) 原理及仿真研究
陈 娜 李杨声 李福瑞 王程勇 湖北 孝感 432001) (湖北三江航天红峰控制有限公司,
克服了直流伺服电动机机械式换向器和电刷 摘 要: 永磁同步电机在伺服控制系统应用中得了迅速的发展, 其优越的调速性能, 带来的一系列限制。文章主要介绍了空间矢量脉宽调制原理及算法流 程;在 Matlab7.6.0\simulink 建模仿真 平台 上搭建了基于 且对模型进行了系统仿真。 SVPWM 算法的永磁同步电机控制系统的仿真模型, 算法; 仿真 关键词: 永磁同步电机; 1 引言 正弦脉宽调制 (SPWM) 随着电力电子的发展, 在交流调速系统中得 到了广泛应用,经典的 SPWM 控制主要是将电压变频器的输出电压尽 同时, 还产生高次谐波分 量接近正弦波, 但并未估计输出电流的波形, 量引起电动机发热、转矩脉动,甚至使系统振荡。而电压矢量控制 (SVPWM) 是从输出电压的角度出发, 目的在于可以生成一个可以调频 调压的三相对称正弦供电电源,SVPWM 是一种优化的 PWM 控制技 降低 术, 能明显减小逆变电路输出电流的谐波成分及电机的谐波损耗, 电压利用率高, 在交流伺服系 转矩脉动, 且其控制简单, 数字实现方便, 统中得了广泛应用。 本文将详细介绍基于 SVPWM 的原理以及永磁同步电机控制算 用 Matlab7.6.0\simulink 软件进行建模、 仿真。 法, (SVPWM) 2 空间矢量脉宽调制 原理 当用三相平衡的正弦电压向交流电动机供电时,电动机的定子磁 磁链矢量的运动轨迹形成圆形的 链空间矢量幅值恒定, 并以恒速旋转, 所以只要按照跟踪 空间旋转磁场 (磁链圆) , 从而产生恒定的电磁转矩, 圆形旋转磁场来控制逆变电路向交流电动机提供可变频电源,并能保 “磁链圆” “磁链跟踪控制” 证电动机形成定子 , 这种控制方法称作 , 磁链 所有又称 “电压空间矢 的轨迹是交替使用不同的电压空间矢量得到的, 即 SVPWM” 量 PWM 控制, 。 三相逆变电路输出状态共有 8 种开关模式,其中 000 和 111 开关 模式时逆变电路电压输出为零, 这两种开关模式成为零状态。所以有效 开关模式为 6 种,由 6 种开关模式和线电压的关系可以得出基本电压 见图 1, 空间矢量, 相邻空间矢量的矢量间隔为 60毅, 而两个零矢量幅值 为零, 位于中心。 当六个非零空间矢量单独输出后,定子磁链矢量的矢端的运动轨 如果能把正六 迹就是一个正六边形, 而我们需要的是圆形的运动轨迹, 就越接近圆形, 按照这个思路, 边形变成正多边形, 正多边形的边越多, 我们必须使得三相逆变器有更多的开关状态,一种方法是利用六种基 本空间电压矢量的线性时间组合来得到更多的开关状态。根据参考输 出电压矢量的区间位置,选择与之相邻的基本电压空间矢量来合成参 图 2 为电压空间矢量的线性组合。t1 和 t2 分别是 UX 考输出电压矢量, 在每一个 T 期间, 和 UX+60 作用时间, T 是 Uref 作用时间, 都改变相邻基 故当 T 本矢量作用时间, 并保证所合成的电压空间矢量的幅值都相等, 磁链轨迹就是 足够小时, 电压空间矢量的轨迹就近似圆形的正多边形, 即形成 “圆形磁场” 一个正多边形, 。
过调制算法在永磁同步电机弱磁调速系统中的应用

过调制算法在永磁同步电机弱磁调速系统中的应用
李计亮1, 高 琳 1, 刘新正1, 梁得亮 1, 邝俊生 2, 姜 红3
( 1 西安交通大学电气工程学院, 西安 710049; 2 快速制造国家工程研究 中心, 西安 710049; 3 西安微电机研究所, 西安 710077)
过调制算法在永磁同步电机弱磁调速系统中的应用 李计亮, 等
电压的调整是按照输出电压的基波和参考电压相一 致的原则进行, 从而保证了算法的线性度。
时, 输出电压和参考电压相位相同但幅值被限制在 六边形边界; 当 参考电压 位于区 域 3和 区域 4 时, 输出电压分别为电压矢量 V4 和 V6, 相对于参考电压 输出电压的相位和幅值都发生了变化。
立的永磁同步电机弱磁调速系统仿 真模型如下图 1 所示, 仿真系 统由转速 控制模块、弱磁控 制模块、 电流控制模块、 SVPWM 模块和反馈信号输出模块以 及永磁同步电机模块组成。其中, 转速控制模块根 据参考转速和反馈转速的差值通过 P I控制器计算定 子参考电流。电流控制模块通过 P I控制器和解耦算 法调整直轴和交轴参考电压, 从而保证直轴和交轴 电流的跟踪。永磁同步电动机模块 采用的是 SIMUL INK 自带电机模块。
因此定子电压空间矢量的幅值为
us e ( Lq iq ) 2 + ( Ld id + f ) 2
( 3)
可见电动机端电压近似正比于电机转速, 随着
转速增加使端电压达到逆变器电压极限后, 由于转
子永磁体的励磁磁势不可调, 只能通过采用施加定
子直轴去磁电流来减弱气隙磁场的方法进一步提高
转速, 此时电机工作于弱磁运行方式。 根据弱磁控制原理在 M at lab /S im ulink 环境下建
svpwm过调制法在永磁牵引逆变器中的应用
现代驱动与控制SVPWM过调制法在永磁牵引逆变器中的应用张育超1徐鹏程2中国船舶重工集团公司第七一三研究所(450000)中船重工海为郑州高科技有限公司(450000)Application of SVPWM Overpopulation Algorithm into Permanent Magnet Traction InvertersZHANG Yuchao XU PengchengCSIC No.713InstituteCSIC Haiwei Zhengzhou High-Tech Co.,Ltd.摘要:为了提高地铁牵引逆变器直流母线电压利用率,将基于叠加原理的过调制处理算法,应用在永磁同步电动机控制系统中,以减小电压谐波畸变率和转矩波动。
文章先介绍过调制算法的原理,然后给出永磁同步电动机的运行方式及各个同步区的调制模式,最后在Matlab/Simulink环境下,建立永磁同步电动机控制系统的仿真模型.将基于叠加原理的过调制算法和传统单模式过调制算法进行对比仿真。
结果表明,采用前者输出相电压谐波含量得到明显的抑制,转矩波动较小。
关键词:永磁同步电动机控制系统过调制牵引逆变器叠加原理中图分类号:TM301.2文献标识码:ADOI编码:10.3969/j.issn.l006-2807.2019.05.008 Abstract:In order to increase the utilization ratio of De bus voltage of subway traction inverter,the overpopulation algorithm based upon superposition principle is applied into the permanent magnet synchronous motor control system,to lower voltage harmonics distortion rate and increase torque ripple.First,principle of overpopulation algorithm is introduced in detail,and then,the operation mode of the permanent magnet synchronous motor and modulation mode of each synchronous zone are given,and finally,simulation mode of the synchronous motor control system is established under the Matlab/Simulink parison and simulation are done between the overpopulation algorithm based upon superposition principle and traditional single-mode overpopulation e the results that the harmonic contents in the output phase voltage is obviously decreased as same as torque ripple,in case of ap・plying former algorithm.Keywords:permanent magnet synchronous motor control system overpopulation algorithm traction inverter superposition principlePWM技术是交流调速系统中一个关键环节,常用的调制方法有SVPWM和SPWM两种。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
overmodulation
0 引言
伴随电力电子技术不断革新,永磁同步电机
( Permanent Magnet Synchronous Motor,PMSM) 在
控制与应用技术I EMCA
違 权 控 刹 名 阄 2018,45 (2)
基 于 SVPWM过调制的超前角弱磁控制
永磁同步电机的策略研究#
刘雨石, 乔鸣忠, 朱 鹏 ( 海 军 工 程 大 学 电 气 工 程 学 院 ,湖 北 武 汉 4 3 0 03 3 )
摘 要 :研 究 了 电 动 车 用 内 置 式 永 磁 同 步 电 机 的 控 制 策 略 ,提 出 了 超 前 角 弱 磁 控 制 与 空 间 矢 量 脉 宽 调 制
( S V P - M ) 过 调 制 结 合 的 控 制 系 统 。超 前 角 弱 磁 控 制 使 用 转 速 、电 流 和 电 压 的 3 个 闭 环 控 制 ,电 机 端 电 压 与 直
流侧电 压 电 压 控 制 环 ,产 生 电 机 弱 磁 的 电 流 超 前 角 直
交 直 轴 电 流 。*v p - m 过调制
Modulaiton,PWM ) 过 调 制 区 ,Joachim Holtz 和
Silverio Bolognan? [13_14]早 别 提 出 了双模
式过调制 和 式过调制 。 [1"] 提出基于叠加原理的空间矢量脉宽调制(Space
Abstract:The control strategy of built-in permanent magnet synchronous motor for electric vehicle was studied, and a control system combining super-angle weakening control and SVPWM overmodulation was proposed. The front angle weak magnetic control used the three closed-loop control of the speed, current and voltage. The motor terminal voltage and the DC side voltage form the voltage control loop, which produced the motor current field. SVPWM overmodulation algorithm could effectively improve the inverter output voltage fundamental amplitude, the motor used the field weakening control mode to achieve the maximum speed after the inverter into the modulation state, the maximum expansion of the speed range. The control system was simulated and the simulation results proved the correctness and feasibility of the theoretical analysis.
、电动汽车
到
[1]。 电机驱动系统中, 电机结构和供电
电压 制 ,
电机采用弱磁控制和过
调制 大调速 ,提高系统 ,
用
PMSM 动系统的研究
[2]。
学者 PMSM弱磁控制策略的研究从20
80
[3],
研究
。 [ 4 ] 提出
,其 控制系统
简
* 基金项目:国家自然科学基金项目(51407188) 作者简介:刘雨石(1992— ),男 ,硕士研究生,研究方向为交流电机调速技术。 乔鸣忠(1971— ),男 ,教授,博士生导师,研究方向为电力系统自动化及电力推进技术。 朱 鹏 (1984— ),男 ,讲师,研究方向为电力电子与电力传动。
控制法[1%]具 宽的调速 ,并 调 速 过 程 中
实
子电流和电压进行校正。 [11]提
出通过转矩指令控制电压相角, 引 电 流 环
调节, 计电机最佳工作
保持系统稳
。 [12]提出分段线性化弱磁控制,提 了
动系统的动
,
复杂,不易
字化实现。
20 90
, 调制算法的
研 究 逐 渐 转 移 到 脉 冲 宽 度 调 制 (Pulse Width
Research on Over-Angle Weakening Control Strategy Based on SVPWM Overmodulation*
LIU Yushi, QIAO Mingzhong, ZHU Peng
( College of Electric Engineering, Naval University of Engineering, Wuhan 430033, China)
提
器 输 出 电 压 基 波 幅 值 ,电 机 使 用 弱 磁 控 制 方 式 达 到 最 大 转 速 后 使
器进入过调制
,最 大 :
大 转 速 。 控制系统进行了 研 究 , 结
了
的和
。
关 键 词 :内 置 式 永 磁 同 步 电 机 ;超 前 角 " 弱 磁 控制 ;过调制
中 图 分 类 号 : TM 301.2 文 献 标 志 码 : A 文 章 编 号 :1673-6540(2018)02-0028-06
— 28 —
省 机 滅 刹 名 闱 2018,45 (2)
控制与应用技术I EMCA
,
大量
,
。 ["]
提出最大转矩电流比控制, 输出 的转矩,
调速
。 [6-7]提出了单电流调
节法,鲁棒性好,但电机 充分利用直流母线电
压 ,带载能力有所下降,调速
。电压极限
椭圆梯度下降法[-9]和 线 模 糊 逻 辑 控 制 器 优 化