微位移机构综述
柔性铰链微动机构的分析与设计(精品pdf)

七、柔性铰链微动机构的分析与设计一. 实验目的1.认识柔性四连杆机构的形貌2.了解柔性铰链工作台的工作原理及应用前景3.掌握柔性铰链的分析与设计方法4.掌握微位移工作台的分析与设计方法二. 柔性铰链微动机构的用途与发展前景由于宇航和航空等技术发展的需要,对实现小范围内偏转的支承,不仅提出了高分辨率的要求,而且对其尺寸和体积提出了微型化的要求。
人们在经过对各类型的弹性支承的实验探索后,才逐步开发出体积小无机械摩擦、无间隙的柔性铰链。
随后,柔性铰链立即被广泛地用于陀螺仪、加速度计、精密天平、导弹控制喷嘴形波导管天线等仪器仪表中,并获得了前所未有的高精度和稳定性。
如日本工业技术院计量研究所,利用柔性铰链原理研制的角度微调装置,在3分的角度范围内,达到了1000万分之一度的稳定分辨率。
近年来,柔性铰链又在精密位移工作台中得到了实用。
柔性铰链微位移机构具有较高的位移分辨率,再配合压电陶瓷驱动器可实现微小位移,可适合各种介质环境工作。
微位移技术直接影响到微电子技术等高精度工业的发展,如微电子技术随着集成度的提高,线条越来越微细化,与之相对应的工艺设备:光刻机、电子束和x射线曝光机等,其定位精度要求为线宽的1/3~1/5,即亚微米甚至纳米级的精度,这就要求精密工作台具备相应的技术水准,柔性铰链是关键技术之一。
三. 柔性铰链工作台的结构a) 单柔性四连杆b) 双柔性四连杆图7-1 单、双柔性四杆机构变形原理图为保证位移方向的直线性,柔性工作台一般由平行四杆结构的铰链组成。
单柔性平行四杆机构沿一个移动方向产生位移时,在其垂直方向同时产生一个交叉耦合位移,参见图一中的Δ,且随柔性铰链弯曲偏转角的增大而增加,而双柔性平行四杆机构(图7-1b),由于结构对称,当沿一个方向受力产生位移时,两侧铰链均产生交叉耦合位移。
即:如果加工完全对称,双柔性平行四杆机构能产生严格的直线运动,从原理上克服了单柔性平行四杆机构易产生交叉耦合位移的缺陷,是超精密定位系统的首选结构,双柔性工作台结构参见图7-2。
一种微位移放大机构的设计与仿真
一种微位移放大机构的设计与仿真第26卷第12期2020年12月机械设计JOURNALOFMACHINEDESIGNDec.20o9一种微位移放大机构的设计与仿真张建瓴,陈万银,可欣荣,魏德仙,洪添胜(1.华南农业大学南方农业机械与装备关键技术省部共建教育部重点实验室,广东广州510642;2.广州建兴光电科技(广州),广东广州510663)数和静态刚度,分析了柔性铰链结构参数对微位移放大机构刚度的阻碍,并对理论计算结果和ANSYS仿真结果进行了对照.结果说明,理论计算值和有限元仿真结果之间存在必然的不同.关键词:柔性铰链;压电驱动器;微位移放大机构;有限元仿真中图分类号:TH123文献标识码:A文章编号:1001—2354(2020)l2—0009—04在微机电系统,周密加工与周密测量,纳米科学与技术等领域中,压电陶瓷驱动器是一种很受欢迎的驱动器,它具有结构紧凑,运动分辨率高,输出力大,能量转换效率高,无机械损耗,无磁场,无污染,响应快等优势,已被普遍用于设计一些超输出位移范围较小,即便是层叠式的压电陶瓷驱动器一样也只有几微米至几十微米的输出位移,在实际应用中,常常需要将压电陶瓷驱动器的输出位移进行放大.柔性铰链是一种新型的传动结构形式,它是利用结构薄弱部份的弹性微小角变形来完成类似铰链的运动传递,具有体积小,加工简单方便,无机械摩擦,无间隙,运动灵敏度高和响应快捷等优势J.柔性铰链由于其特殊的结构,专门适宜用作精密定位领域的传动机构,如在周密定位领域常常采纳柔性铰链单元来设计制作微位移放大机构,并与压电陶瓷驱动器等一路应用于对运动行程要求较大的场合J.文中第一分析了差式杠杆的位移放大原理,并据此设计了一种新型结构的微位移放大机构,计算了该放大机构的位移放大倍数和刚度.该机构具有刚性好,位移放大倍数高等特点.最后通过ANSYS有限元方式对微位移放大机构进行了仿真计算,分析对照了不同柔性铰链参数下放大机构刚度计算的理论值和有限元仿真结果.1位移放大原理利用柔性铰链结构对压电陶瓷驱动器的输出位移进行适当的放大有多种方式和原理,如利用杠杆原理,压杆失稳原理及特殊机构等.其中,利用杠杆原理的位移放大机构刚性好,结构简单,效率高,它的最大优势是能够在原理上使运动输[1][2][3][4][5][6][7][8]参考文献阮忠唐.机械无级变速器设计与选用指南[M].北京:化学工业出版社,1999:215—217.周有强.机械无级变速器[M].北京:机械工业出版社,2001: 292—305.—Max型无级变速器的承载能力研究及仿真[D].青岛:青岛科技大学,2007:9—11.variabletransmission(PDCVT)[J].MechandMachTheory,2005,40(9):1—30.Kimberley,William.Transmissiontrends[J].AutomaticEngi—neeering,2006,31(1):20—21.ZhouYou?qiang,CuiXue——velopmentofmechanicalvariablespeeddrives[J].JournalofMe—chanicalTransmission,2o05,29(1):65—68.孙恒,陈作模.机械原理[M].6版.北京:高等教育出版社,2000:61—64.魏阳,王书义.基于Pm/E的机械系统运动仿真分析[J].现代机械,2004(5):55—56. Simulativeresearchonpulsationstep—lessspeedvariator ofsixphasedjuxtapositionconnectingrodsbasedonPro/EQINGYan-qing,WANGJun-fa(SchoolofMechanicalEngineering,JiamusiUniversity,Jia-musi154007,China)Abstract:Thispaperestablishedthemathematicalmodelof pulsationstep?lessspeedvariatorofsixphasedjuxtapositioncon—neetingrodsandakinematicanalysisonthemodelwascarriedout—tionsofeachrod,speed,anSd~accelerationinthestep—lessspo~dvariatorthosevaryalongwiththevariationofinputtingrotarybasiswasprovidedfortheapplicationinengineeringprojeetofpul—sationstep—lessspeedvariatorofsixphasedjuxtapositionconnecting rods.Keywords:pulsationstep—lessspeedvariator;Pm/E;kine—maticsimulation;connectingrodmechanismFig9Tab0Ref8"JixieSheji"8856收稿日期:2020—12—10;修订日期:2020—06—19作者简介:张建瓴(1965一),男,河南灵宝人,副教授,博士,研究领域:微机电系统.10机械设计第26卷第12期的位移放大机构由于受到空间结构等的限制,放大倍数一样较小,有时很难知足任务要求,因此,更多情形下是采纳两级乃至多级放大的方式组成一个复合式杠杆运动放大机构".差式微位移放大机构确实是利用杠杆原理组成一个差动式在相对较小的结构下取得较大的位移输出比,其原理如图1所示.图中A,A"点别离为杠杆I和Ⅱ的输入端;B,C点别离为杠杆l和Ⅱ的输出端;杠杆Ⅲ为终端输出杠杆;D点为最终位移输出点.图中z一l别离为各杠杆的臂长.D图1差式杠杆位移放大原理假设在A,A"两点同时输入大小为的位移,在B,C两点就取得两个方向相反的位移:=和=一,于是B,c两点之问就形成一个位移差:时=一c:(+)(1)图1中,杠杆Ⅲ假定日点不动,C点绕曰点旋转,那么D点的输出位移为=一丁t6.;然后假定c点不动,日点绕c点转动,那么D点的输出位移5为:.假设B,c两点同时动作,D点的总输出位移为:.=+=(?等+等?等)(2)DD¨D'丁__.(2)即差式杠杆放大机构中D点的最终输出是由杠杆I和Ⅲ组成的串联复合式二极杠杆放大与杠杆Ⅱ和Ⅲ组成的串联复合式二级杠杆放大相加取得.2微位移放大机构设计差式微位移放大机构是由两组二级放大机构组合而成,设计这种放大机构必需注意两个问题":(1)如何构造两组二级放大杠杆,并将压电陶瓷驱动器的输出位移同时加到两组杠杆的输入端;(2)两组放大杠杆的一级杠杆输出可否形成反向位移,并同时加到同一个二级杠杆上,实现第2级的差式放大.文中依照上述原理设计了如图2所示的一种新型结构的个位移棚寸,B,C,D各点处的运动方向别离如图中箭头所示,最后通过D点处输出放大后的位移.柔性铰链是一种带圆弧或矩形切口的一体化新型铰链,常用的柔性铰链结构有直角形,圆角形,直圆形和椭圆形等_】.其中,直圆形铰链刚度大,加工方便,精度高,是应用最广的一种柔性铰链.文当选择直圆形柔性铰链,结构参数如图3所示.图2微位移放大机构示用意r一切割半径;t一最小厚度;6一宽度;^一高度图3柔性铰链参数在实际应用中,柔性铰链会受到力和力矩的作用,如方向拉力,绕),和轴的力矩和等.依照柔性铰链变形特点,同时也为了计算和分析简便,当h》t时,假设:(1)位移放大机构中各构件仅在柔性铰链处产生弹性变形,而其他部份那么以为是刚性的;(2)柔性铰链只产生转角变形,无伸缩及其他变形.图3中,当在柔性铰链右端作用一绕z轴的力矩时,柔性铰链绕轴的刚度为:肘.z屡!z[1+1…ctan而】'L(25+1)(4s+).(4s+)………J(3)式中:a——柔性铰链在力矩作用下的转角变形量;E——材料的弹性模量;=r/to能够看出,柔性铰链的刚度K要紧决定于铰链结构参数b,r,t及材料的弹性模量等.关于微位移放大机构,机构的位移放大倍数和刚度是两个彼此关联的重要参数.刚度大,机构精度高,可是变形量(放大倍数)会减小;刚度过小,变形量大,精度那么降低.mnl,Z2=40.5mm,f3=10mm,f4=38mm,f5=15mm,l6=57.75mm.参考式(2),可取得微位移放大机构的理论放大倍数的计算公式:=×+等×/3(4)将各杆长数值代入式(4),取得微位移放大机构的放大倍数为=35.5.当在输入端施加作使劲F,且输入位移(变形量)为,微位移放大机构各柔性铰链处变形如图4所示.2020年12月张建瓴,等:一种微位移放大机构的设计与仿真图4微位移放大机构变形示用意假设在各柔性铰链处仅产生转动变形,参考图2,放大机构的弹性势能为:U=÷[2+++(8+以)+2g+(日+)](5)在小变形条件下,近似有:一sin0l等=手一In=寺a—sin=等=上/5r13+)同时,03,和相关于,和口较小,将其忽略不计,那么式(5)能够写成:U=÷【2++202】=K:=rl+音+z(去+).卜(6)依照虚功原理,有:,=au缸=【百1+音+z(去+)].(7)那么由式(7)可得位移放大机构的静态刚度为:=F=[可1一+寺+z(最+)](s)从式(8)能够看出,差式放大机构的刚度与各杆件长度及柔性铰链转角刚度等有关,当机构中各杠杆的长度一按时,放构材料利用65Mn(弹簧钢)时,弹性模量为200GPa,泊松比为0.3,密度7850kg/m.选择柔性铰链结构参数b=12mm,t=0.6mm和r:3mm,由式(8)可得微位移放大机构的理论刚度值为K=0.984N//~m.3有限元仿真为了验证上述计算结果的正确性,利用ANSYS软件对所设计的微位移放大机构进行了有限元建模及仿真,分析计算柔性铰链参数,如铰链宽度b,铰链半径r,铰链厚度t和铰链高度h等对机构刚度的阻碍.并在参数相同的条件下,对刚度的理论计算值与ANSYS仿真结果进行对照分析.选用三维二十节点的Solid95单元作为结构实体单元,每个节点有3个自由度(,Y,z方向).Solid95单元在空间的方位任意,具有塑性,蠕变,辐射膨胀,应力刚度,大变形及大应变的能力,可提供不同的输出项,而且在保证了精度的同时许诺利用不规那么的形状,这专门适用于精度要求较高和曲线边界的建模.网格划分采纳智能网格划分,划分网格后成效如图5a所示;图5b为施加约束和载荷后的有限元模型,即在划分网格后的模型底部平面上施加约束限制全数自由度,在A处平面施加向上的推力F;图5c为空载时微位移放大机构的变形成效.(a)实体模型的网格划分(b)加载荷和约束的有限元模型(c)空载时的变形成效图5有限元仿真模型图6所示为柔性铰链结构参数对微位移放大机构刚度影响的理论计算结果及有限元仿真结果,图中各因素的初始值分为b=10mm,r=2mm,h=8mm时铰链厚度t的转变对机构刚度的阻碍,其余类似.由图6能够看出,当柔性铰厚度t,铰链宽度b增大时,机构的刚度慢慢增大;随着柔性铰链半径r的增大,机构的刚度慢慢减小;理论上,铰链的高度h对机构的刚度没有阻碍,可是从仿真结果看,铰链高度h对机构有必然的阻碍,从数值上看,阻碍程度不大,关于所研究的机构,当h>11mm时,刚度转变趋于平缓.由图6还能够看出,放大机构刚度的理论值和ANSYS仿真结果存在必然的误差.为了进一步比较这一误差大小,笔者还通过大量的正交仿真计算进行了比较,结果均说明:理论计算的于铰链结构参数取b=12rain,t=0.6mill,r=3mill时,刚度计算的理论值为K=0.984N/Ixm,ANSYS仿真值为1.063N/pan,相l2机械设计第26卷第12期对误差7.43%,说明上述理论计算具有必然的正确性.4结论言i芝链夏窭基铰链厚度/ram2?0L.董暑i≮显昌i≥$赳2(a)铰链厚度t的阻碍0l020铰链宽度/ram(b)铰链宽度6的阻碍铰链半径/ram(c)铰链半径r的阻碍05lO铰链高度,mm(d)铰链高度h的阻碍图6铰链结构参数对机构刚度的阻碍(1)依照差式位移放大原理设计了一种新型结构的微位移放大机构,并计算和推导了微位移放大机构的位移放大倍数和静态刚度.(2)分析了柔性铰链结构参数对微位移放大机构刚度的阻碍,结果说明:柔性铰链的最小厚度t,铰链宽度b和铰链切割半径r对机构刚度的阻碍最大,同时,ANSYS仿真结果和理论计算值之间存在必然的误差,但最大误差小于10%.[2][3][4][5][6][7][8][9][1O][12][13]参考文献—positioningsys—ternfortheductile—modegrindingofgrindingmaterials[J].Journal ofMaterialsProcessingTechnology,1996,61(4):310—319.薛实福,李庆祥.周密仪器设计[M].北京:清华大学出版社,1993.王建林,胡小唐.纳米定位技术研究现状[J].机械设计与研究,2000(1):43—44.吴鹰飞,周兆英.柔性铰链的应用[J].中国机械工程,2002,13(18):1615—1618.—Engineering,1996,19(1):4—10.—sionmieropositioningstageutilizingflexurehinges[J].Nanotechnol-ogy.1999(1O):394—398.验[J].机床与液压,2005(2):l2一l3,4.应用[J].压电与声光,2004,26(6):514—516.究[J].航空,2004,25(1):74—78.构[J].压电与声光,1999,21(2):96—99,103.矢野键,福井泉.压电素子振幅扩大机构[C]//1991年度精密工学会春天大会学术论文讲会演讲论文集,1991:225—230.与应用[J].江苏大学,2003,24(4):9一l2.吴鹰飞,周兆英.柔性铰链转动刚度计算公式的推导[J].仪器仪表,2004,25(1):125—128.Designandsimulationofal【indofmicro-displacement amplificationmechanismZHANGJian?ling,CHENWan_yin,KEXin-rong.,WEI—chineandEquipment,SouthChinaAgriculturalUniversity,Guang—zhou510642,China;2.Lite-OnOptoTechnology(GZ)LTD,Guangzhou510663,China)Abstract:AkindofHewtypedmicro—displacementamplifica—tionmechanismwasdesignedaccordingtotheamplificationprinci——tionmultipleandstaticrigidityofthisdisplacementamplification —blehingedstructuralparametersontherigidityofmicro?-displace??onthetheoreticalealculationresultwiththeANSYSsimulationre—suitwhichindicatedthatthereexistedcertaindifferencesbetween thevalueoftheoreticalcomputationandtheresultoffiniteelementsimulation.Keywords:flexiblehinge;piezoelectricactuator;micro—dis-placementamplificationmechanism;finiteelementsimulation Fig6rab0Ref13"JixieSheji"86105432l064208642O●l●l0O0O8642O8。
基于类V型柔性铰链的微位移放大机构
基于类V型柔性铰链的微位移放大机构刘敏;张宪民【摘要】A micro-displacement flexure amplifier was designed based on a high accuracy quasi-V-shaped flexure hinge to reduce its parasitic motion and to improve its dynamics performance.The performance of the quasi-V-shaped flexure hinge was compared with that of a common high accuracy right circular flexure hinge.In consideration of the central offset during the rotation of flexure hinge, the amplification ratios of secondary-lever micro-displacement mechanisms based on the quasi-V-shaped flexure hinge and the right circular flexure hinge were derived on the basis of the theories of elastic mechanics and material mechanics.The finite element model was established with ANSYS software to verify the theoretical derivation of amplification ratios of displacement.The amplification ratios of displacement, the parasitic motions and inherent frequencies of the two kinds of amplifiers mentioned above were compared.The finite element results show that the amplifier based on quasi-V-shaped flexure hinge has smaller parasitic motion but higher inherent frequency,and its first two-order inherent frequencies are 1.68 times and 1.41 times of those based on right circular flexure hinge.Finally, the amplification ratios of displacement and the parasitic motions for the two kinds of amplifiers were measured by a micro-vision measurement system.The experiment results show that the amplification ratios and relative parasitic motion ratios of amplifiers based on quasi-V-shaped and right circular flexure hinge are 4.387 and 4.529 aswell as 0.3147 and 0.3342 respectively.It concludes that the parasitic motion is effectively reduced and the dynamics performance is improved if the quasi-V-shaped flexure hinge is used in the micro-displacement amplifiers.%采用新型高精度类V型柔性铰链设计了柔性微位移放大机构,以减小该类机构的寄生运动并提高其动力学性能.对类V型柔性铰链与最常见的高精度直圆型柔性铰链的性能进行了比较;在考虑柔性铰链转动中心偏移量的基础上,基于弹性力学和材料力学理论推导了基于类V型柔性铰链和基于直圆型柔性铰链的两类二级杠杆式微位移放大机构的放大比.采用ANSYS软件,建立了放大机构的有限元模型,验证了位移放大比的理论推导,并对上述两类放大机构的位移放大比、寄生运动和固有频率进行了仿真和比较.有限元分析结果显示:基于类V型柔性铰链的放大机构有着更小的寄生运动和更高的固有频率,且前2阶固有频率分别是基于直圆型柔性铰链放大机构的1.68倍和1.41倍.最后,采用微视觉测量系统测量了两类放大机构的位移放大比和寄生运动.结果表明:基于类V型和直圆型柔性铰链放大机构的放大比和相对寄生运动比分别为4.387、4.529和0.314 7、0.334 2,显示类V型柔性铰链用于微位移放大机构可有效减小寄生运动并提高动力学性能.【期刊名称】《光学精密工程》【年(卷),期】2017(025)004【总页数】10页(P999-1008)【关键词】位移放大机构;类V型柔性铰链;直圆型柔性铰链;寄生运动;固有频率【作者】刘敏;张宪民【作者单位】华南理工大学广东省精密装备与制造技术重点实验室,广东广州510641;华南理工大学广东省精密装备与制造技术重点实验室,广东广州 510641【正文语种】中文【中图分类】TH132随着精密工程、精密测量、微机电系统(MEMS)以及机器人等领域的快速发展,柔顺机构的应用越来越广泛且有着巨大的优势和潜力,尤其是在轻型、微型化领域[1-4]。
微动工作台的分类和组成

1.2 微动工作台的类型及主要组成微动工作台根据其工作原理和驱动方式的不同可分为以下几种。
1.2.1 扭轮摩擦传动式微位移平台扭轮摩擦传动式微位移机构是利用扭轮摩擦传动机构实现微位移机构。
一般的摩擦传动方式是将驱动摩擦轮展开为直线运动,运动分辨率有限。
当将摩擦副的主动轮与从动杆母线交角从直扭轮摩擦传动图图二角减小为一很小的角度时,形成的摩擦副即为扭轮摩擦副,利用扭轮摩擦副做成的传动机构称扭轮摩擦传动机构,它可以得到很小的导程和纳米级的运动分辨率和定位精度,具有运动平稳、无间隙和无爬行等优点。
我们研制的扭轮摩擦传动机构示意图如图1所示,其导程小于0.2mm,若选用高运动分辨率的电机,则可达在250mm范围内得到纳米级的运动分辨率和定位精度。
它可应用于许多超精密传动领域。
1.2.2 机械传动式微位移平台机械传动式微位移机构是一种最古老的机构,在精密机械和仪器中应用很广,其结构形式较多,主要有螺旋机构、杠杆机构、契块凸轮机构以及它们的组合机构。
但因机构中存在机械间隙、摩擦磨损以及爬行现象等,所以运动灵敏度和精度都很难达到高精度,所以该机构只适宜于中等精度。
螺旋式微动机构简图图三差动螺旋式微位移机构图四1.2.3 螺旋式微位移平台螺旋式微位移机构的结构简图如图2所示,其结构简单、制造维修方便,它是利用螺旋传动原理米获得微小直线位移,转动手轮l转动经螺杆2将螺旋运动转换为直线运动。
运动件的直线位移J与手轮转角中关系为:J=±—}·≯因此,若螺杆螺距f已定,在螺杆与螺母配研和传动平稳时,控制妒的大小即可得到微位移,其精度可达l 0 u m。
它广泛应用于微调和测量机构,如千分尺等。
为了得到更高精度的微位移,就采用如图3所示的差动螺旋式微位移机构。
它的螺杆l有两段螺距分别为,2和f,的螺纹,f2大于,。
且螺旋方向相同,则螺母2的微位移(即输出位移)s为:s=(f2一f1)/(2)式中西为手轮转角,若屯和f】分别为0.75mm和0.7mm,其差值为O.05mm,手轮的圆周刻度分划为50格,则手轮转动1格时,在螺杆与螺母配研和传动平稳以及零件达到加工精度时,运动件的位移量为1 u m。
基于柔性铰链的微位移设计
第一章绪论1.1 柔性铰链简介1.1.1 柔性铰链定义柔性铰链作为一种小体积、无机械摩擦、无间隙和运动灵敏度高的传动结构,被广泛应用于各种要求微小线位移或角位移、且高精度定位的场合。
开创了工作台进入毫米级的新时代。
柔性铰链有成千上万的应用,如:陀螺仪、加速度计、天平、控制导弹的喷嘴、控制器显示仪、记录仪、调整器、放大连杆、计算机、继电器和传动连杆。
60年代前后,由于宇航和航空等技术发展的需要,对实现小范围内偏转的支承,不仅提出了高分辨率的要求,而且对其尺寸和体积提出了微型化的要求。
人们在经过对各种类型的弹性支承实验探索后才逐步开发出体积小、无机械摩擦、无间隙的柔性铰链。
随后柔性铰链在支撑结构、联接结构、调整机构和测量仪器中的得到广泛应用,并获得了前所未有的高精度和稳定性,并日益成熟。
70年代末,美国国家标准局引入了柔性铰链机构以放大压电驱动器的位移,使其设计的工作台既具有亚纳米级的位移分辨率,又具有相对较大的行程。
近年来,柔性铰链以其特殊的性能在精密机械、精密测量、微米技术和纳米技术等领域得到广泛应用没,尤其是柔性铰链与压电致动结合实现超精密位移和定位。
柔性铰链用于绕轴作复杂的有限角位移,它的特点是:无机械摩擦、无间隙、运动灵敏度高。
柔性铰链有很多种结构,最普通的形式是绕一个轴弹性弯曲,这种弹性变形是可逆的。
1.1.2 柔性铰链运动的实现方法柔性铰链是通过弹性形变来实现铰链运动。
施加的弹性变形力会导致铰链中心点偏移其几何中心,从而影响柔性铰链的转动精度。
柔性铰链用于绕轴做复杂运动的有限角位移,它有很多种结构,最普通的形式是绕一个轴弹性弯曲,这种弹性变形是可逆的。
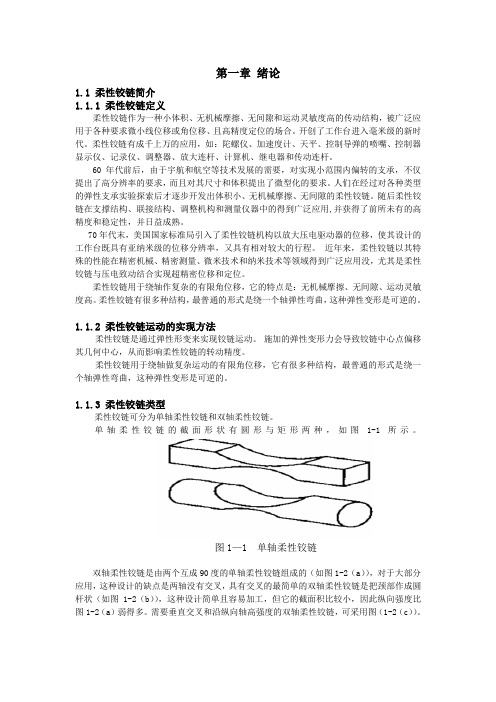
1.1.3 柔性铰链类型柔性铰链可分为单轴柔性铰链和双轴柔性铰链。
单轴柔性铰链的截面形状有圆形与矩形两种,如图1-1所示。
图1—1 单轴柔性铰链双轴柔性铰链是由两个互成90度的单轴柔性铰链组成的(如图1-2(a)),对于大部分应用,这种设计的缺点是两轴没有交叉,具有交叉的最简单的双轴柔性铰链是把颈部作成圆杆状(如图1-2(b)),这种设计简单且容易加工,但它的截面积比较小,因此纵向强度比图1-2(a)弱得多。
基于柔性铰链的微位移放大机构设计

刚度是决定柔性铰链性能的重要参数。对于含有较 多柔性接头的机构和复合柔性铰链来说,理论估计有一 定的局限性。对于设计此类柔性铰链,有限元分析方法 是一种有效的设计方法。在本节,通过研究最常用的柔 性铰链——直圆型柔性铰链,并利用其成熟的理论公式 来验证有限元模型。
图 1 直圆型柔性铰链的结构图 Fig.1 Structure diagram of right circular flexure hinge
Table 1 Results of theoretical analyses and FEA
R(mm)
kx (N/m)×108 Analytic FEA Error%
kαz (Nm/rad) Analytic FEA Error%
2.0
2.59 2.36 8.92
10.05 9.71 3.41
2.5
2.1 理论推导
如图 1 所示的直圆型柔性铰链,其设计公式最先由
Paros 和 Weisbord[6]推导出来并讨论了在柔性铰链三个坐
标轴方向施加载荷所引起的转角和线性位移。吴鹰飞和
周海英[13]从基本材料力学出发推导了一组设计公式,其
结果在数值上与 Paros 公式相同。选择后者作为理论计算
的依据。
1引 言
作为精密机械与精密仪器的关键技术之一,微位移 技术随着微电子、宇航和生物工程等学科的发展而迅速 发展起来。柔性铰链以其无空回和无机械摩擦、运动平 滑以及分辨率高等优点广泛的应用在科研以及工业装置 中。这些装置包括微位移平台[1]、超精密机械加工[2]、微 夹持器[3]、加速度计[4]、陀螺仪、扫描隧道显微镜[5]、运 动导轨、导弹控制装置、高精度照相机、天线和阀等。
Kα z
柔性铰链微位移放大机构的研究
柔性铰链微位移放大机构的研究张远深;刘晓光;张园成;赵庆龙;於又玲【摘要】针对积层式压电驱动器的输出位移行程过小的缺点,提出了一种柔性铰链微位移放大机构.从理论出发对单轴柔性铰链进行分析,建立转角刚度的数学模型,得到相应的结构参数对其性能的影响规律和理论上的解析表达式,利用有限单元法对理论模型进行对比验证,得出单轴柔性铰链设计的一般规律.为压电伺服阀阀芯运动机构的设计奠定了基础.%A mechanism of magnifying micro displacement by using flexure hinges is proposed. Then the design method and the corresponding design parameters on the performance of one-axis flexure hinge are discussed. The model using the finite element method,is established and the general rale of one-axis flexure design is obtained. The work is useful for the application in the mechanism of the piezoelectrical servo valve.【期刊名称】《甘肃科学学报》【年(卷),期】2011(023)002【总页数】4页(P99-102)【关键词】柔性铰链;力学模型;有限元方法【作者】张远深;刘晓光;张园成;赵庆龙;於又玲【作者单位】兰州理工大学能源与动力工程学院,甘肃兰州730050;兰州理工大学能源与动力工程学院,甘肃兰州730050;兰州理工大学能源与动力工程学院,甘肃兰州730050;兰州理工大学能源与动力工程学院,甘肃兰州730050;兰州理工大学能源与动力工程学院,甘肃兰州730050【正文语种】中文【中图分类】TH123微位移技术是精密机械与精密仪器的关键技术之一,在航天、生物学、光学、微电子学等领域有着广泛的应用前景[1,2].在机械式位移技术中,由于存在着较大的间隙和机械摩擦,致使运动灵敏度和定位精度都很难达到很高的要求.而柔性铰链式微位移机构具有解雇紧凑、体积小、无机械摩擦、无间隙、无爬行、机械谐振频率高、抗震动干扰能力强等优点,采用压电驱动器进行驱动则很容易实现高分辨率的位移.柔性铰链是柔性铰链微位移放大机构设计的关键.在总结现有的柔性铰链微位移放大机构的基础上[3-8],提出了单轴柔性铰链的设计分析方法,得出单轴柔性铰链设计的一般规律.单轴转动柔性铰链,其参数结构如图1所示,由力矩Mz引起的柔性铰链扭转变形为θ,由于柔性铰链实际角位移非常小,可认为θ=tanθ,曲线斜率可得到铰链转角分析单轴柔性铰链的变形,实际上是由许多微小段弯曲变形累积的结果,每个微小段可以认为是长度为dx的等截面矩形梁,而且作用在微小段两侧面的弯矩也是相等的,根据材料力学,可得铰链中性面曲率半径公式其中E为材料的弹性模量;M(x)为微小段dx上的弯矩;J(x)为微小段dx的截面对中心轴的惯性矩.由于实际结构中柔性铰链的全长通常为2R,较结构中其他尺寸小,所以可以认为柔性铰链所受弯矩变化不大,可以把M(x)看作常数.曲线y=f(x)上任意一点的曲率为在单轴柔性铰链的实际应用中,弯曲变形产生的挠度大于铰链的全长,所以转角θ≪1,因此联合公式(1)、(2)、(4)可得因为柔性铰链的全长2R比其他尺寸小,所以可以认为铰链的弯矩变化不大,即可把M(x)看成常数.将式(5)中直角坐标系变换成极坐标,相应地,可得单轴柔性铰链转角刚度kb公式为其中R为柔性铰链圆弧缺口的半径;T为柔性铰链的宽度;t为柔性铰链的最小厚度.根据式(7),将弹性模量E、柔性铰链宽度T、缺口半径R以及最小厚度t带入式中作积分,即可得出柔性铰链的转角刚度.由此可以看出柔性铰链的转角刚度与其结构参数密切相关,为了更为直观地理解各结构参数与转角刚度之间的关系,计算并分析了圆弧缺口半径R、最小厚度t对柔性铰链刚度kb的影响,计算结果如图2所示.该算例选择材料(铍青铜,QBe2)与结构的具体参数为由图2知,最小厚度增大,转角刚度增大;缺口半径增大,转角刚度减小.在实际应用中,由于结构尺寸的限制,柔性铰链缺口半径通常<5mm,因此本算例中,可以看出R<5mm,t>0.5mm的范围内,柔性铰链具有较大的转角刚度,在设计中应避免其结构尺寸落在该范围内,使得铰链具有较小的转动刚度,减小其机械阻抗,有利于提高放大倍率.计算并分析了铰链宽度T、最小厚度t对柔性铰链刚度kb的影响,计算结果如图3所示.该算例选择材料(铍青铜,QBe2)与结构的具体参数为由图3知,转角刚度随铰链宽度T的增大而线性增加,最小厚度t在满足强度要求的前提下尽量选择较小值.在解析法建模的过程中,只考虑到柔性铰链受到弯矩载荷的情形.实际上,铰链存在转动的同时,存在一定的压缩和拉伸变形,而且还受剪切力的作用,不可避免的产生计算结果与实际值之间的误差.通过有限单元法建立单轴柔性铰链的数值模型,通过施加载荷与约束,使其模拟实际柔性铰链的工作状态,可以得出与实际值更为接近的计算结果.通常,通过计算铰链在外力作用下的位移来计算柔性铰链的转角刚度kb,得式中M为柔性铰链所受转矩,θ为柔性铰链的转角;F为柔性铰链所受力;L为柔性铰链所受力的力臂长度;D为受力点的位移.首先,建立柔性铰链的三维实体模型,结构参数如图4所示,包括柔性铰链半径R、最小厚度t、铰链宽度T以及铰链厚度B.在柔性铰链的解析法建模中只考虑了前3个结构参数,没有将厚度B考虑在内,即假设柔性铰链以外的部分为刚性.而在有限单元建模分析中是通过建立实际尺寸的实体模型,再施加简化了的实际约束条件,计算得出各节点的计算结果,因而考虑到更多的结构参数,其计算结果更接近于真实值.然后,进行定义单元类型、定义材料属性、划分网格、施加载荷约束以及求解计算等步骤.求解并计算出各组柔性铰链刚度值后再应用解析法计算出同样参数下的刚度值,同有限元法计算的结果进行对比研究.对柔性铰链进行有限元分析,首先确定柔性铰链的具体结构参数,具体数值如下:模型一端为固支,另一端施加20N的力载荷,计算该端的位移量,由公式M=kbθ可得柔性铰链的转角刚度.通过对不同中心厚度t的柔性铰链刚度的对比可知,应用解析法和有限元法的计算结果有一定的差别.2种方法计算结果的比较如图5所示.在最小厚度t<0.7mm范围内二者十分吻合.最小厚度t>0.7mm时,有限元法计算的刚度值低于解析法,原因是解析法建模时未考虑中心偏移以及柔性铰链圆弧以外部分的刚度.随着最小厚度的增大,t值与柔性铰链厚度B的比值越来越大,当t 与B的比值>0.1时,有限元模型圆弧部分与圆弧以外部分的刚度比较接近,整体发生挠曲变形,造成较大的挠曲变形,导致柔性铰链的刚度降低.由图5还可以分析出,增大铰链厚度t可较为明显地提高转角刚度.柔性铰链R由0.25mm变化至2.5mm时,有限元分析结果与理论结果对比有较大的差异,如图6所示.理论分析计算的结果是转角刚度随圆弧半径R的增大而减小;有限元分析的结果为转角刚度在一定的范围内波动,没有明显的变化趋势,其原因是理论计算中认为铰链的弯矩变化不大,柔性铰链所受的弯矩M(x)看成常数.而在有限元分析中,随着圆弧半径的增大,与力臂长度L的比值由0.03增至0.3,因而在圆弧弧段内弯矩变化较为明显.若将M(x)看成常数,势必导致一定的计算误差.有限元分析的结果较为接近实际情况,由此可以看出柔性铰链圆弧半径对柔性铰链的转角刚度影响较小.通过对单轴柔性铰链转角刚度的分析,建立单轴柔性铰链的力学模型,得到相应的结构参数对其性能的影响规律,利用有限元分析法对理论模型进行对比验证,得到单轴柔性铰链设计的一般规律,为压电伺服阀阀芯运动机构的设计奠定基础.【相关文献】[1]Renyi Yang,Musa Jouaneh,Rudolph Sch-weizert.Design and Characterization of a Low-profile Micropositioning Stage[J].Precision Engineering,1996,18(1):20-29. [2]Smith T S,Badmi V G.Elliptical Flecure Hinges[J].Revsci Instrum,1997,68(3):1 474-1 483.[3]林洁琼,王磊,李迎春,等.基于有限元的柔性铰链微位移放大机构设计[J].机床与液压,2009,37(10):21-23.[4]张定会.采用柔性铰链实现微位移的方法研究[J].仪表与自动化装置,1999,29(5):11-13.[5]张志杰,袁怡宝.单边倒角形柔性铰链的计算与性能分析[J].光学精密工程,2007,15(3):384-389.[6]张志杰,袁怡宝.单边椭圆柔性铰链的计算与性能分析[J].机械设计与研究,2007,23(1):50-53.[7]Lobontiu N,Paine J S N.Corner-filleted Flexure Hinges[J].Mech Design,2001,123(3):346-352.[8]吴鹰飞,周兆英.柔性铰链的设计计算[J].工程力学,2002,19(6):136-140.。
基于交叉簧片柔性铰链的空间微位移机构
基于交叉簧片柔性铰链的空间微位移机构魏传新;陈洪达;尹达一【期刊名称】《光学精密工程》【年(卷),期】2015(023)011【摘要】基于交叉簧片柔性铰链(简称‘交叉铰链’)设计了一种用于光束跟踪、精密指向和瞄准的同轴八铰微位移放大机构.该机构使用菱形构型,用交叉铰链作集中柔性元件,节点处交叉铰链两两同轴配合使用,以便保证运动的平稳输出.研究了机构的运动学以及力学性能,计算了微位移机构的行程放大比和灵敏度;根据交叉铰链的刚度模型,推导出微位移机构的理论刚度;最后,应用有限元软件对机构进行建模并对运动学、静力学以及动力学性能进行仿真.完成了样机的加工和测试,测试结果显示,机构放大比为1.905,理论与测试误差低于2.2%,结构刚度为18.21 N/mm,误差低于0.32%,一阶频率为8.8 Hz,误差低于5%.分析结果验证了本设计的可行性和有效性.该机构适用于空间高精度微位移领域.【总页数】8页(P3168-3175)【作者】魏传新;陈洪达;尹达一【作者单位】中国科学院大学,北京100049;中国科学院上海技术物理研究所,上海200083;中国科学院红外探测与成像技术重点实验室,上海2000083;中国科学院上海技术物理研究所,上海200083;中国科学院红外探测与成像技术重点实验室,上海2000083;中国科学院大学,北京100049;中国科学院上海技术物理研究所,上海200083;中国科学院红外探测与成像技术重点实验室,上海2000083【正文语种】中文【中图分类】TH112;TP271.2【相关文献】1.基于类V型柔性铰链的微位移放大机构 [J], 刘敏;张宪民2.基于柔性铰链杠杆放大机构的二维微位移平台设计 [J], 刘涛;张心明3.基于有限元的柔性铰链微位移机构研究 [J], 刘庆纲;陈良泽;梁君;刘美欧;孙庚;徐临燕4.基于柔性铰链的微位移机构的设计与分析 [J], 黄志威;梅杰;明廷鑫;胡吉全;陈定方5.基于完备椭圆积分解的交叉簧片式柔性铰链大挠度建模 [J], 张爱梅;陈贵敏;贾建援因版权原因,仅展示原文概要,查看原文内容请购买。
压电陶瓷微位移致动器
压电陶瓷微位移致动器
压电陶瓷微位移致动器是一种利用压电陶瓷材料的压电效应来实现微小位移的装置。
它通常由压电陶瓷元件、驱动电路和机械结构组成。
当在压电陶瓷元件上施加电压时,压电陶瓷会产生应变,从而导致机械结构发生微小的位移。
通过控制施加在压电陶瓷上的电压,可以精确地控制机械结构的位移量。
压电陶瓷微位移致动器具有以下优点:
1. 高精度:可以实现亚微米甚至纳米级别的位移控制,具有很高的精度。
2. 快速响应:压电陶瓷的响应速度非常快,可以实现高速的位移控制。
3. 小尺寸:压电陶瓷微位移致动器通常具有很小的尺寸,可以应用于微型化的设备中。
4. 高能量密度:压电陶瓷材料具有较高的能量密度,可以实现高效率的能量转换。
压电陶瓷微位移致动器在许多领域都有应用,如精密加工、光学调整、生物医学设备、微机电系统等。
它们可以用于实现微小的位置调整、聚焦、变形控制等功能。
微执行器研究综述
微执行器研究综述摘要:在微机电系统中,微执行器是核心部件。
为了优化设计微执行器,通过对比近年来各种微执行器的研究和发展,系统地总结了线性位移微执行器所采用的驱动原理、驱动方式和应用以及存在的优缺点,根据微执行器的驱动方式的不同,对微执行器的应用进行了介绍。
关键词:微机电系统、微执行器、线性、驱动方式、原理1 引言微机电系统是集精密机械、微电子、自动控制、材料、生物等技术于一体的新型研究领域,可以解决微小领域中收集处理信息、决策、行动及周围环境的控制等方面的复杂的技术问题,在工业管道、信息通信、医疗卫生、军事以及生物科技领域有着潜在的巨大应用前景,在MEMS中,微执行器作为可动部分,其动作范围的大小、动作效率的高低、动作的可靠性等指标决定了系统的成败,它是MEMS中最重要的环节。
文中在总结MEMS最新研究成果的基础上,就MEMS驱动原理做进一步介绍。
微执行器的工作原理是将光、电、热及磁等多种形式的能量转换成能量输出。
因此它有多种不同的驱动和结构形式。
从能量转换形式分类,有静电驱动、电磁驱动、压电驱动、形状记忆合金驱动、凝胶驱动、热驱动及超导驱动等形式。
2静电线性执行器图1为日本Fukuda等人1997年制作的线性马达,其工作原理为一个可动的、端部带有凸起的导电板当在这枚导电板和埋在衬底中的导电体之间施加电压,导电板会向下弯曲,推动端部突起向前运动一小段距离,当撤掉电压时,由于凸起点与绝缘表面的摩擦力不平衡,会产生运动的校正而恢复原状这时导电板已产生了向前的净运动。
重复以上步骤可使导电板形成连续的线性运动。
3.1压电惯性线性执行器上海交通大学的卢秋红等人研究的线性执行器,其工作原理是:(1)系统处于初始状态(2)压电器件快速伸长,滑块因惯性保持不动(3)压电器器件缓慢收缩,滑块在静摩擦力的作用下想做运动一个步距,改变控制信号的频率3.2 压电仿生型步进式直线执行器现有各种直线执行器存在的突出缺点是精度不够高、输出力小、结构复杂,有的寿命短有的还未实用化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微位移机构综述
作者:荣烈润
作者单位:
刊名:
机电一体化
英文刊名:MECHATRONICS
年,卷(期):2005,11(2)
被引用次数:8次
1.荣烈润超精密加工中的精密定位技术 1992(01)
2.薛实福精密仪器设计 1991
3.李圣怡微位移机构研究[期刊论文]-航空精密制造技术 2000(04)
4.King T G Piezoelectric Ceramic Actuation: A Review of Machinery Applications 1995
5.史习敏精密机械设计 1987
6.庞振基精密机械及仪表零件手册 1993
7.王先逵精密加工技术实用手册 2001
1.马淑梅.陈彬.MA Shu-mei.CHEN Bin超精密加工中的微位移技术[期刊论文]-同济大学学报(自然科学版)2000,28(6)
2.李蓓智.杨永金.杨建国.张家梁.徐源.LI Bei-zhi.YANG Yong-jin.YANG Jiang-guo.ZHANG Jia-liang.XU Yuan 精密微位移工作台的设计与性能分析[期刊论文]-机械设计与研究2008,24(4)
3.沈健.朱仁胜.赵韩单自由度微位移机构柔性铰链的研究[期刊论文]-上海交通大学学报2004,38(6)
4.杨力生.杨士中.曹海林.王韬.雷剑梅.YANG Li-sheng.YANG Shi-zhong.CAO Hai-lin.WANG Tao.LEI Jian-mei 微位移测量技术的分析[期刊论文]-重庆大学学报(自然科学版)2007,30(4)
5.刘振波微位移技术研究[学位论文]2006
6.张玲玲精密微位移调整系统的设计与研究[学位论文]2009
7.张辽远.宫毅超.刘玉梅.ZHANG Liao-yuan.GONG Yi-chao.LIU Yu-mei微位移机构误差补偿技术研究[期刊论文]-兵工学报2008,29(8)
8.姚燕生多自由度微位移工作台的研究[学位论文]2003
9.叶果.李威.王禹桥.杨雪锋.余凌.YE Guo.LI Wei.WANG Yuqiao.YANG Xuefeng.YU Ling柔性桥式微位移机构位移放大比特性研究[期刊论文]-机器人2011,33(2)
10.刘登云.杨志刚.程光明.曾平.LIU Deng-yun.YANG Zhi-gang.CHENG Guang-ming.ZENG Ping微位移机构的现状及趋势[期刊论文]-机械设计与制造2007(1)
1.卜巾晏.何广平柔性铰链精密定位机构的设计与分析[期刊论文]-机械设计与研究 2009(3)
2.王晓凤.冯之敬压电式微位移机构设计与实验研究[期刊论文]-机械工程师 2007(3)
3.黄亮高精度六自由度微动平台驱动技术研究[学位论文]硕士 2006
4.周俊峰.谭建平差动微位移机构在激光板厚测量中的应用[期刊论文]-机床与液压 2006(8)
5.李要.龙士国.涂林.何涛焘结构参数对超磁致伸缩致动器动态特性的影响[期刊论文]-传感器世界 2010(2)
6.朱鹏.邓建明大口径望远镜主镜能动支撑驱动器的个体设计和性能测试[期刊论文]-光学仪器 2008(1)
7.韦鹤RYJ-Ⅱ型热压设备关键部件研制及压力系统研究[学位论文]硕士 2005
8.韩成顺大型光学非球面超精密加工新方法及其几何模型的研究[学位论文]博士 2005本文链接:/Periodical_jdyth200502001.aspx。