仿生六足步行机器人步态轨迹的研究与仿真
六足爬行机器人总体设计方案
本文旳设计为六足爬虫机器人,机器人以交流-直流开关电源作为动力源,单片机为控制元件,伺服电机为执行部件,机器人采用三足着地进行运动,通过单片机对伺服电机旳控制,机器人可以实现前进、后退等运动方式,三足着地运动方式保证了机器人可以平稳运行。
伺服电机具有力量大,扭矩大,体积小,重量轻等特点。
单片机产生20ms 旳PWM 波形,通过软件改写脉冲旳占空比,从而到达变化伺服电机角度旳目旳。
1 机器人运动分析1.1 六足爬虫式机器人运动方案比较方案一:六足爬虫式机器人旳每条腿都能单独完毕抬腿、前进、后退运动。
此方案旳特点:每条腿都能自由活动,每条腿都能单独进行二自由度旳运动。
每条腿旳灵活性好,更轻易进行仿生运动,六足爬虫机器人可以完毕除规定外旳诸多动作,运动旳视觉效果更好。
由于每条腿能单独完毕二自由度旳运动,因此每条腿上要安装两个舵机,舵机使用数量大,舵机旳安装难度加大,机械构造部分旳制作相对复杂,又由于每个舵机都要有单独旳信号控制,电路控制部分变得复杂了,控制程序也对应旳变得复杂。
方案二:六足爬虫式机器人采用三腿为一组旳运动模式,且同一侧旳前腿、后腿旳前后转动由同一侧旳中腿进行驱动。
采用三腿为一组(一侧旳前足、后足与另一侧旳中足为一组)旳运动方式,各条腿可以协调旳进行运动,机器人旳运动相对平稳。
此方案特点:相比上述方案,个腿可以协调运动,在满足运动规定旳状况下,舵机使用数量少,节省成本。
机器人运动平稳,控制、驱动部分都得到对应旳简化,控制简朴。
选择此方案,机器人还可进行横向运动。
两方案相比,选择方案二更合适。
1.2 六足爬虫式机器人运动状态分析1.2.1 机器人运动步态分析六足爬虫式机器人旳行走是以三条腿为一组进行旳,即一侧旳前、后足与另一侧旳中足为一组。
这样就形成了一种三角形支架构造,当这三条腿放在地面并向后蹬时,此外三条腿即抬起向前准备轮换。
这种行走方式使六足爬虫式机器人运动相称稳定,任何时刻有三足着地,可以保持良好旳平衡,并可以随时随地停息下来,由于其重心总是落在三角支架之内。
六足步行机器人腿机构绳传动系统设计与仿真

腿 机 构是 六 足 步 行 机 器 人 的 主要 执 行 部 件 , 它
一
方 面要 支 承 机 器 人 躯 体 的 重 量 , 一 方 面 要 实 现 另
机 器人 的步行 运 动 。六 足 步行 机 器 人 腿部 传 动 系 统
决 定 了腿 的形 式 、 量 、 动惯 量 、 动 空 间 、 动 精 重 转 运 运 度 、 力特 性 和能 承 受 载荷 的大 小 等机 械 性 能 , 决 动 也
式 、 带 式机 器人 相 比 , 行机 器人 在 不 平 或 松 软 的 履 步 地 面 上运 动 时 , 机 动 性 好 、 耗 小 等 特 点 。 因此 , 有 能
步行 机器 人技 术 一 直是 国 内外 研 究热 点 之 一 。 而步 行 机 器 人 类 别 中 的 六 足 步 行 机 器 人 具 有 三 足 立 地 稳 定 裕 度 大 、 行 速 度 快 等 特 点 。 可 以 说 , 六 足 步 行 步 对 机 器人 的研究 , 有更 加特 殊 的重要 性 。 具
间后 绳 与滑 轮会 出 现 磨 损 而 发 生 打 滑 , 机 器 人 腿 ③ 部不 能承 受较 大 负载 。另 一 种是 带 有 螺旋 槽 轮 的 钢 丝绳摩 擦 传 动 , 传 动 方 式 是 一 种 绳 及 卷 筒 传 该 动 , 旋槽 轮旋 转 时将 钢 丝绳 带 入 绳槽 , 助 楔形 的 螺 借
了一种 如 图 1所 示 的依 靠钢 丝 绳拉 力 进行 传 动 的绳 传 动系 统 。
图 2 昆 虫 腿 部 结构 示 意 图
从动 杆
摆动
图 1 新 型 绳 传 动 系 统 结 构 图
图 1中 , 主动杆 是 与驱 动 器输 出轴 相 连 的杆 , 从
六足爬壁机器人的运动学建模与仿真
六足爬壁机器人的运动学建模与仿真邓超锋;魏武;侯荣波;余俊侠【摘要】六足机器人因其运动灵活、承载能力强和稳定性好等优点得到广泛的应用.为对六足爬壁机器人运动进行控制,首先要建立其运动学模型.因基于旋量理论的建模方法能够简化运动学计算过程的复杂性,基于旋量理论建立了六足爬壁机器人正运动学模型,并在此基础上求解机器人逆运动学.同时为了对比分析所建模型的准确性,我们在ADMAS上建立机器人虚拟样机仿真模型,并且设计步态,使虚拟样机末端执行器按照预定的轨迹运动.其次在MATLAB软件下根据建立的逆运动学模型求解机器人末端执行器按预定轨迹运动时各关节转动角度.通过对比两个模型各关节转动角度随时间变化的曲线,以及各关节角度误差和末端位移误差来验证建立的机器人运动学模型的正确性.研究结果表明,基于旋量理论建立的六足爬壁机器人的运动学模型精度高,能够作为多足机器人研究的基础.【期刊名称】《机械设计与制造》【年(卷),期】2018(000)012【总页数】5页(P245-248,253)【关键词】旋量理论;逆运动学;旋转步态;ADMAS仿真;转动角【作者】邓超锋;魏武;侯荣波;余俊侠【作者单位】华南理工大学自动化科学与工程学院,广东广州 510641;华南理工大学自动化科学与工程学院,广东广州 510641;华南理工大学自动化科学与工程学院,广东广州 510641;华南理工大学自动化科学与工程学院,广东广州 510641【正文语种】中文【中图分类】TH16;TP242.31 引言六足机器人因机构简单且灵活、承载能力强及稳定性好[1],且具有良好的运动灵活性和环境适应性等优点,同时其肢体冗余的结构特点保证了机器人能够完成多种工作,在核工业、建筑、交通、石化和消防等领域有较好的应用前景[2-4]。
具有很重要的研究意义和实用价值。
一直是国内外的足式机器人研究的重点。
需要通过控制六足机器人而使其完成特定的任务,其中最为普遍的一个方面是对其运动的控制。
仿生六足步行机器人步态轨迹的研究与仿真
M CA A S S 。 D M 软件相结合 的方式对六足仿生步行机器人的样机模型进行了运动学仿真与分析。 通过仿真 , 了所设计 的 验证
三角步态的适用性 和所选择的三次样条 曲线作为机器 人足端点轨迹曲线方案的可行性 。 详细阐述了六足仿生步行机器人轨
迹仿 真的原理 、 方法及过程 , 找到了一种在 A A S D M 环境下求解 机器人逆解的方法 , 简化了理论计算 , 提高了设计效率。
维普资讯
第 4 第1 2卷 0 期
文 章 编 号 :0 6—94 (0 7 1 10 3 8 2 0 )0—05 16—0 5
计 算 机 仿 真
27 0 0 年l月 0
仿 生六足 步行 机 器 人步 态 轨 迹 的研 究 与仿 真
闰尚彬 韩 宝玲 罗庆生 , ,
关键 词: 六足仿生步行机器人 ; 步态规划 ; 运动学仿真 ; 虚拟样机 中圈分类号 :P 4 T22 文献标 识码 : B
R e e r h an i ul ton o heW a k n a k s a c d S m a i ft l i g Tr c o o c H e apo a ki bo fBi ni x d W l ng Ro t
R N S a g—bn , N B o—l g, U ig—se g U hn i HA a i L O Qn n h n
( 。S ho f ca i l n e i l n ier g B in ntueo eh ooy B in 00 1C ia 1 c ol hnc dV hc a E gn ei , e igIstt f c nlg , e ig10 8 ,hn ; o Me aa ur n j i T j
( 。北京理工大学机械与车辆工程学院 , 1 北京 10 8 ; 0 0 1
六足救援机器人结构设计与步态分析
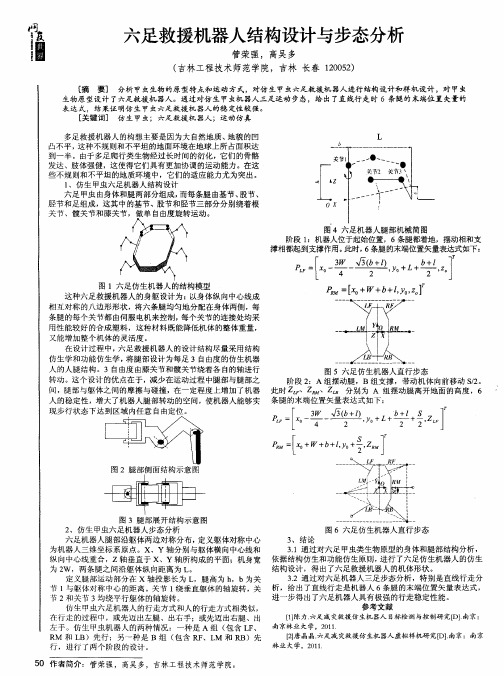
多足救援机器人 的构想主 要是因为大 自然地质、 地貌 的凹 凸不平 , 这种不规则和不平坦 的地面环境在地球上所 占面积达 到 一半 。由于 多足爬行类 生物 经过 长时间的衍化,它们 的骨骼 发达 、肢体强健 ,这使得它们具有更加协调 的运动 能力 。在 这 些 不规 则和 不平 坦的地质环境 中,它们 的适应能力尤为突 出。 1 、仿生 甲虫六足机器人结构设计 六足 甲虫 由身体和腿 两部分组成 , 而每条腿 由基节 、 股节 、 胫节和足 组成,这其 中的基节 、股节 和胫 节三 部分分别绕着 根 关 节、髋关节和膝关节 ,做单 自由度旋转运动 。
- -
I 3 W 一
r
… + 弘
]
P e M
,
=
I + W+ 6 + , , Y 0 + , z 村l
图 2 腿 部 侧 面 结构 示 意 图
图 3腿部展 开结构示意图 2 、仿 生 甲虫六足机器人步态分析 六足机器人腿部沿躯体两边对称 分布, 定义躯体对称 中心 为机器人三维坐标系原 点。x、Y 轴分别与躯体横 向中心线和 纵 向中心线重合 ,z轴垂直于 x、Y轴 所构成的平面;机 身宽 为2 W ,两条腿 之间沿躯 体纵 向距离为 L。 定义腿部运动 部分在 x轴投影长 为 L ,腿 高为 h ,b为关 节 1与躯 体对称 中心的距离 。关节 1 绕垂直躯体的轴旋转 ,关 节 2和关节 3均绕 平行躯体 的轴旋转 。 仿生 甲虫六足机 器人的行走方式和人 的行走方式相类似 , 在行走 的过程 中,或先迈 出左腿 、出右手 ;或先迈 出右腿 、出 左手 。仿 生甲虫机 器人的两种情况 :一种是 A组 ( 包含 L F 、 R M 和 L B) 先 行 ; 另 一 种 是 B 组 ( 包含 R F 、L M和 R B)先 行 ,进 行 了两 个 阶 段 的 设 计 。
六足仿生机器人及其步态研究现状调查
六足仿生机器人及其步态研究现状调查目录引言 (6)二.六足仿生机器人的发展现状 (6)三.六足仿生机器人越障步态运动原理 (11)四.六足机器人三角步态分析 (12)五.六足机器人越障步态设计 (13)六.六足仿生机器人越障步态的选择 (15)结论 (17)引言步态是行走系统的迈步方式,即行走系统抬腿和放腿的顺序。
由于开发步行机器人的需要,McGhee在1968年总结前人对动物步态研究成果的基础上,比较系统地给出了一系列描述和分析步态的严格的数学定义。
之后各国学者在四足、六足、八足等多足步行机的静态稳定的规则周期步态的研究中取得了很多成果。
这些成果包括各种步态特点及分类,如三角步态、波动步态、自由步态、跟随步态、步态参数及其相互关系等。
二.六足仿生机器人的发展现状从 1959年美国制造出世界上第一台工业机器人起,在短短半个世纪的时间里,机器人的研究就已经历了4个发展阶段:工业机器人、遥控机器人、智能机器人和仿生机器人[2]。
从机器人的角度来看,仿生机器人是机器人发展的最高阶段;从仿生学的角度来看,仿生机器人是仿生学理论的完美综合与全面应用。
本质上讲,仿生机器人指的是利用各种无机元器件和有机功能体所组建起来的在运动机理和行为方式、感知模式和信息处理、控制协调和计算推理、能量代谢和材料结构等多方面具有生命形态特征从而可以在未知的非结构化环境中灵活、可靠、高效地完成各种复杂任务的机器人系统[3]近年来,随着昆虫仿生学理论与计算机技术的飞速发展,使得对多足仿生机器人的研究,成为大家关注的焦点。
国内外多所大学和研究机构,相继成功研制出了性能卓越的多足仿生机器人。
六足机器人 Genghis(见图 1-1),由美国麻省理工学院人工智能实验室于1989 年研制,主要用于在地外行星(如火星)表面执行探测任务。
每条腿 2 个旋转自由度,采用基于位置反馈的伺服电机驱动,集成了电流测量单元以获取关节力矩信息,装备了 2 个触须传感器、2 个单轴加速度计,可在复杂路面上高效行走。
六足机器人的步态规划研究

六足机器人的步态规划研究引言:六足机器人是一种仿生机器人,模仿昆虫的行走方式,并具有在复杂地形上移动的能力。
步态规划是六足机器人研究中的关键问题之一,对于实现机器人自主导航和避障、提高稳定性和效率具有重要意义。
本文将对六足机器人的步态规划进行研究,探讨不同的方法和算法。
一、六足机器人的步态六足机器人的步态是指机器人在行走时,六个足部的运动方式以及相互之间的协调关系。
机器人的步态分为静态步态和动态步态。
静态步态是指机器人在足部接触地面时保持静止的步态,可以提供较强的稳定性;动态步态是机器人在足部不接触地面时保持运动的步态,可以提供较高的行进速度。
二、步态规划的问题与挑战步态规划的主要问题是如何安排六足机器人的足部运动和步幅,以实现机器人的运动目标。
步态规划需要考虑以下几个方面的挑战:1.动力学约束:六足机器人在行走过程中需要满足动力学约束,如维持平衡、保持稳定等。
2.地形适应性:六足机器人需要能够适应各种地形,包括平坦地面和不规则地形,需要根据不同地形调整步距和步频。
3.高效性:步态规划需要尽量降低机器人的能耗,提高运动的效率和稳定性。
4.实时性:步态规划需要实时调整机器人的步伐,以应对环境的变化和避免障碍物。
三、步态规划的方法和算法为了解决上述问题,研究者们提出了多种方法和算法,下面介绍几种常用的方法:1.基于力反馈的方法:机器人通过传感器感知外部环境的力,根据力反馈调整步态和步幅,以增加机器人的稳定性和适应性。
2.基于模型的方法:机器人通过建立数学模型来描述自身和环境的动力学特性,通过求解模型进行步态规划。
3.基于遗传算法的方法:通过仿真和优化,使用遗传算法最佳步态,以达到一定的目标或者满足一定的约束条件。
4.基于强化学习的方法:机器人通过与环境的交互学习,通过强化学习算法自主调整步态,以提高机器人的适应性和效率。
四、实验与应用为了验证步态规划的方法和算法,研究者们进行了大量的实验。
一些实验结果表明,步态规划可以显著提高六足机器人的运动能力和适应性。
六足仿蜘蛛机器人的结构设计与仿真分析

六足仿蜘蛛机器人的结构设计与仿真分析一、概述随着科技的飞速进步,机器人技术已经逐渐渗透到各个领域,特别是在仿生机器人领域,其研究与应用更是取得了显著的成果。
六足仿蜘蛛机器人作为仿生机器人的一种,其结构设计与仿真分析是当前研究的热点之一。
六足仿蜘蛛机器人是一种模拟蜘蛛行走方式的机器人,具有适应性强、稳定性高、运动灵活等优点。
通过模拟蜘蛛的六足行走机制,该机器人能够在复杂环境中实现高效、稳定的运动,具有重要的应用价值。
在结构设计方面,六足仿蜘蛛机器人需要考虑多个因素,包括机械结构、驱动方式、运动学分析等。
机械结构是机器人的基础,需要合理设计各部件的尺寸、形状和连接方式,以实现机器人的稳定行走和灵活运动。
驱动方式的选择直接影响到机器人的运动性能和效率,常见的驱动方式包括电机驱动、液压驱动等。
运动学分析则是研究机器人运动规律的重要手段,通过对机器人运动学模型的建立和分析,可以预测和优化机器人的运动性能。
在仿真分析方面,通过建立六足仿蜘蛛机器人的虚拟样机,可以在计算机环境中进行各种实验和测试,以验证机器人设计的合理性和有效性。
仿真分析可以帮助研究人员快速发现设计中存在的问题,并进行相应的优化和改进。
仿真分析还可以为机器人的实际制造和测试提供重要的参考依据。
本文旨在探讨六足仿蜘蛛机器人的结构设计与仿真分析方法,为该类机器人的研究和应用提供有益的参考和借鉴。
1. 机器人技术的发展趋势随着科技的飞速进步,机器人技术正迎来前所未有的发展机遇。
从简单的自动化操作到复杂的智能决策,机器人技术正逐步渗透到我们生活的方方面面。
在当前的科技浪潮中,机器人技术的发展趋势呈现出以下几个显著特点。
人工智能技术的深度融合是机器人技术发展的重要方向。
随着深度学习、神经网络等技术的不断发展,机器人逐渐具备了更强的感知、理解和决策能力。
这使得机器人能够更好地适应复杂多变的环境,实现更高级别的自主操作。
机器人技术的集成化趋势日益明显。
传统的机器人往往只具备单一的功能,而现代机器人则更倾向于将多种功能集成于一体,实现一机多用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一个步态周期中,步行机器人机体重心向前移动的距离
称为步距s,各足处于支撑相时相对于机体的移动距离称为
足的行程月,两者的关系为:
R=J·8
(2)
为了便于描述,可将六足仿生步行机器人的各足进行编
on condition of ADAMS is found.80 the theoretical
calculation iB simplified and the design efficiency is improved.
KEYWORDS:Bionic hexapod walking robot;Gait planning;Kinematics simulation;Virtual prototype
收稿日期:2006—09—14修回日期:2006—09—23
——156一 万方数据
摆趁,完成支撑腿和摆动腿的转换,即完成一个局期的运行 过程.以后重复以上步骤。
空。 牵。 壹
圈1 六足仿生步行机器人整体结构造型
围2 六足仿生步行机器人腿部运动简围
3 六足仿生步行机器人步态原理分析
三角步态是六足仿生步行机器人实现步行的典型步态。
兰兰兰矍!!竺
文章编号:1006—9"348(2,007)10—0156-05
堇篁 丝鱼 塞
!竺兰竺皇
仿生六足步行机器人步态轨迹的研究与仿真
闰尚彬’,韩宝玲1,罗庆生2
(1.北京理工大学机械与车辆工程学院,北京100081; 2.北京理工大学机电工程学院,北京100081)
摘要:针对仿生六足步行机器人关节较多,其步态轨迹规划和关节控制量计算都较为复杂的现状,采用SofidwoAs软件与 MSC.ADAMS软件相结合的方式对六足仿生步行机器人的样机模型进行了运动学仿真与分析。通过仿真,验证丁所设计的 三角步杏的适用性和所选择的三次样条曲线作为机器^足端点轨迹曲线方案的可行性。详细阐述了六足仿生步行机器人轨 迹仿真的原理、方法及过程,找到了一种在ADAMS环境下求解机器人逆解的方法,简化了理论计算,提高了设计效率。 关键词:六足仿生步行机器人;步态规划;运动学仿真;虚拟样机 中圈分类号:TF242 文献标识码:B
型.为避免仿真模型过于复杂’笔者对样机模型进行了简化。 只保留其关键部件,这样并不影响其运动仿真的效果。当造
一158一
在定义六足仿生步行机器人足端点轨迹的驱动之前.先 导人在造型阶段生成的·.姒文件。以生成样条轨迹。具体 方法如下:在ADAMS中选择File_+inport…一File Type_÷ Test Data(·.·)-+Creat Spline_File To Read-+选择已经 创建的文件(·.戗t)-+OK,这样系统就会自动生成模型名 称为sp]ine_l的样条曲线。用同样的方法生成其它样条曲线。
明4运动学仿真流程圄
豳7 添加约束后虚拟样机模型
圈5 六足仿生步行机器人足端点轨迹
鞘s薅:捌
t/=t/=I,。
蛐x向健时俩变化曲缱
舢墒随时筒变他曲堍
铀1相对,壹化曲线
圈6 插值后足端点轨迹曲线
表1 满足预定轨迹相美数据一览寰
5.2 六足仿生步行机器人虚拟样机模型的建立州 利用Solidworks软件对六足仿生步行机器人进行三维造
为使六足仿生步行机器人按图5所示步态实现行走,选 定有荷因数口=0.5,步行周期T=2s。步长s=200ram,并将 机器人足端点轨迹按图5所示曲线进行设计。由图5可以看 出,这时机器人足端点的轨迹被分为五段,其中AB—BC— CD—DE段为摆动相孰迹,AE段为支撑岛鞔迹。摆动时每段 均为三次样条曲线,并在交接点处连续可导。这里,设定机器 人起始点A和落地点E的速度为零。起始点、落地点以及中 间点的数据如表1所示。根据表1提供的数据,笔者采用 MATLAB工具箱提供的样条函数c¥叩e对摆动相进行了三次 样条插值,获得x(t)、y(t),y(x)变化益线如图6所示。扶所 得曲线可以看出,这些曲线连续可导,且起始时刻和落地时 刻速度为零。此后,可将x(t)、y(t)曲线离散化并保存为·. txt文件,以供ADAMS仿真时定义足端驱动调用。用同样的方
——157——
万方数据
法。可对支撑相进行插值,这里不再赘述。
型工作进行完毕之后,将做好的三维模型保存为·,x_t文 件,然后在ADAMS中导人已做好的三维模型并添加约束如 图7所示。需要指出的是,对机器人各足的根关节、髋关节、 膝关节应分别施加转动副(Revolute)。由于机器人的六足呈 对称分布,且当该机器人采用三角步态运动时,支撑腿与摆 动腿的运动完全相同,因此只需定义摆动相、支撑相和机身 三部分驱动,即可让机器人按预定的轨迹运动。
其核心思想就是把机器人的六是分为两组(躯体一侧的前、
后足和另一侧的中足构成一组),三足支撑机体并推动机器 人前进(称为支撑相).另三足摆动为下一步支撑做准备(称
为摆动相),整个机器人的运动过程就是支撑相与摆动相交
替、循环的过程。
在机器人研究领域,支撑相和摆动相随时间变化的顺序
集合称为步态。对匀速行走的机器人来说,其足相呈周期变
围3 六足仿生步行机器人三角步态示意图
4 六足仿生步行机器人足端轨迹选择 笔者通过研究发现,在对机器人进行步态规划时,机器
人足端点轨迹的选择对机器人的运动特性有着重要影响,机 器人行走过程中的连贯性、稳定性、美观性以及所需驱动转 矩的大小均受其牵制。对于六足仿生步行机器人来说。较好 的足端点轨迹应具有趣好的起落特性、速度和加速度特性。 一般而言,人们多采用初等函数来描述机器人的末端轨迹, 如一次函数、正弦函数、摆线、抛物线等等。但机器人最后实 际采用的步态往往是步行周期比较短,而采样点叉比较多的 步态。这时,采用初等函数描述机器人末端轨迹将不可避免 地造成加速度突变的现象,进而影响机器人行走过程中的稳 定性,并造成驱动电机的超载。也有人曾采用多项式插值的 方法H“”,这样能满足轨迹一阶、二阶可导和连续,但由于采 样过多,会造成多项式插值阶次过高,并因此而导致震荡掉-。
用.实现了高质量、高速度、高效率、低成本的整体设计。
2 六足仿生步行机器人整体结构简介
六足仿生步行机器人整体结构造型和腿部运动简图分 别如图l和图2所示。该机器人各足均采用具有三个转动关 节的特种结构。其中根关节用于侧摆.摆动范围[一450, 45。]。基节长56ram;髋关节用于俯仰,俯仰范围[一45*, 135。】,股节长217.04ram;膝关节用于屈伸,屈伸范围[00. 135。],胫节长244.04mm。每个关节都由独立电机驱动,优点 在于结构紧凑.足端可达运动空问很大,且运动灵活。由于该 机器人的腿部关节是饺接的,因而在步行时即使出现失稳现 象也具有较强的姿态恢复能力。
z向:0 对应的六足仿生步行机器人摆动相足端点的驱动程序 如下: X向:
if(time一1:0,0.if(time一2:AKISPL(time一1.0。.jqr2. spline..2,0),200,矾time一3:200。200,if(time一4:
AKISPL(time一3…0 jqt2.splinej,0)+200,400,if(time一5 :400,400,400+AKISPL(time一5…0 jqr2.spline_2.
of bionic hexapod walking robot have been done by using solidworks and MSC,ADAMS.Through simulaton,the
applicability 0f designed triangle gait and the feasibility of using thrice curve as the feet track are validated.And
1 引言
六足仿生步行机器人是一种多连杆、多自由度的特种机 器人,其运动学、动力学特性十分复杂。为了提高该类型机器 人的研制水平,开发一套能满足其运动学、动力学分析要求 的仿真系统是非常必要的。众所周知,ADAMS是虚拟样机领 域非常优秀的一款软件.它能根据研究对象的实际运动系统 建造仿真虚拟样机,在物理样机建造之前就可分析其工作性 能,并能方便地改进和优化。由于ADAMS三维造型功能相对 薄弱,本文采用CAD软件Solidworks与ADAMS相结合的方 式,对六足仿生步行机器人进行了运动仿真,大大提高了六 足仿生步行机器人的研究效率,节约了研究时间和研制费
:400,400,400 4-AKISPL(time一4…0 jql2.spline_2,
0))))))
Y向:
if(time:0,0,if(time一1:AKISPL(time…0 jqr2.
spline 1,O),0,if(time一2:0,0,if(time一3:AKlSPL(time一 2,0..jqr2.spline_l,0),O,if(time一4:0,0。AK|SPL(time一 4,0,.jqr2.spline_l,0))))))
与上述样条曲线对应的六足仿生步行机器人支撑相足 端点的驱动方程如下:
X向:
讧(time:0,0.if(time一1:AKISPL(time…0 jqr2.
spline..2,0),200,if(time一2:200,200,if(time一3: AKISPL(time一2,v'.0 jqr2.spline 2,0)4-200,400,if(time一4
the principle.method and couxse 0f the track simulation of bionic hexapod walking robot are expatiated in detail.
Ioh Thus a way for finding a conveme answer of the
ABSTRACT:As there are many jalms in the bionic hexapod walking robot and the calculation of its walking