基于动态特性的剑杆织机共轭凸轮开口机构的设计方法
有梭织机开口机构

多臂开口机构的组成
选综装置 提综装置 回综装置
包括信号存贮器和阅读装置 作用:根据织物组织控制综框升降顺序
包括拉刀式、离合器驱动偏心轮两类 作用:执行提综
包括回综弹簧、多臂机构积极驱动两种 作用:执行回综
(1)最简单多臂开口机构
拉钩 重尾 杆 纹钉 纹板
拉 刀
底板 吊综杆
花 筒
(2)单动式单花筒多臂开口机构
3.复动式单花筒多臂开口机构
• (1)复动式单花筒多 臂开口机构工作原理
工作原理要点:
1.中心轴每一回转(主轴两 转),上下拉刀便各做一次往 复运动,其运动方向相反,形 成两次梭口。 2.纹板上第一排孔位控制平头 重尾杆,第二排孔位控制弯头 重尾杆。
3.如果处于工作位置的纹板孔 位上植有纹钉,相应重尾杆尾 部抬起,头部落下,拉钩落到 拉刀上,实现提综
2.凸轮开口机构
(1)工作原理(要点)
机械的回转或滑动件(如轮或轮的突出部分), ①综框下降由凸轮积极 它把运动传递给紧靠其边缘移动的滚轮或在槽面上 驱动综框上升依靠两页 自由运动的针杆,或者它从这样的滚轮和针杆中承 综框的关联作用。 受力。 ②当某踏盘的大半径与 相应的转子接触时,所 对应的踏杆下降。 ③踏盘数目与该种织物 组织使用的综框数相等。
思考:凸轮开口机构与多臂开口机构共同点?
均通过控制综框的升降而形成梭口
由于受综框片数的限制,这两种开口 机构仅能织制简单组织及小花纹组织
提花开口机构特点
提花开口机构不用综框
每根经纱都由一根单独运动的综丝控制
织物的经向组织循环纱线数可达几千根
组成:选综装置、提综装置、回综装置
• 单动式提花开口机构
一
二
(2)常用织物组的 踏盘与吊综方法
织造原理 答案

第六章开口1. 梭口的形状、尺寸、种类、梭口对称度、梭口清晰度的概念。
(P117)2. 掌握开口过程中影响拉伸变形的因素。
(P122)梭口高度梭口对称度梭口长度后梁位置3. 梭口形成时期。
开口时期经纱离开经位置线即综平位置到梭口满开为止,称为开口时期。
这个时期经纱处于运动状态,经纱张力由小到大逐渐增加。
静止时期梭口满开后,经纱在梭口上下两个极端位置上处于静止状态,以便于引纬器通过梭口,这个时期称为静止时期;闭口时期梭口开始闭合,经纱由静止进入运动状态,直至综平位置,这个时期称为闭口时期。
经纱张力逐渐减小。
4.对综框运动规律的要求。
(1)对综框速度的要求:在开口时期,经纱张力由小到大逐渐增加,综框运动的速度应由快到慢逐渐减小,接近满开时速度最小;在闭口时期,经纱张力由大到小逐渐降低,综框运动的速度则应相应的由慢到快逐渐增大,综平时速度最大;(2)对综框加速度的要求:在开口终了及闭口开始的瞬间,也就是综框由运动到静止和由静止到运动的瞬时,加速度应该尽可能小;其余时间内,速度的变化要均匀缓和,以避免综框产生跳动和冲击,从而使经纱张力的波动较小,断头的可能性降低;(3)开口、静止、闭合三个时期的时间分配要合理;(4)在满足引纬顺利进行的前提下,综框运动的动程应该尽量小。
5. 开口运动的工艺参数(开口时间经位置线)开口时间:在开口过程中,上下交替运动的综框相互平齐的瞬时主轴所处的位置角称为开口时间(又称综平度或综平时间)。
经位置线:所谓经位置线是指综平时织口、综眼、停经架中导棒和后梁握纱点等各点所连接的一条折线,即经纱在织机上综平时的实际位置线。
第七章引纬1. 引纬方法的分类。
❖按照引纬介质的不同,将引纬方式分为:梭子引纬片梭引纬剑杆引纬喷气引纬喷水引纬❖按照引纬方式将织机分为两大类:有梭织机剑杆织机新型织机(无梭织机)片梭织机喷水织机喷射织机喷气织机❖多相(多梭口)织机也属于新型织机。
2. 梭子飞行速度计算、梭子飞行时的受力分析的结论。
7-1 开口机构

综丝下端的小重锤回综。
第一节 开口机构 三、提花开口机构
1.单动式提花开口机构
(2)选综装置 由花筒、纹板、横针、横针板组 成。花筒由纹板(图7-21)包覆。 横针同竖钩垂直配置,数目相等, 且一一对应,每根竖钩都从对应 横针的弯部通过,横针的一端受 小弹簧11达到作用而穿过横针板 12的小孔再伸向花筒13的小纹孔。
综框联动式开口机构
第一节 开口机构 1.综框联动式凸轮开口机构
(以织制平纹为例)
(2)开口周期图 AB弧线:综框在下方静止 CD弧线:综框在上方静止 B-C:上升弧线 D-A:下降弧线
开口
闭合
开口
闭合
综平
上方静止
综平
下方静止
第一节 开口机构 1.综框联动式凸轮开口机构
(以织制平纹为例) (2)开口周期图
拉刀拉钩式、偏心盘回转式
织制较复杂的小花纹织物。 一般用16页综框,最多可 达32页综框。
提花开口机构
织制复杂的大花纹织物, 单动式提花开口机构、复动式提 直接用综丝控制每根经纱 花开口机构、电子提花开口机构 的升降,如1400号提花机。
一、凸轮和连杆开口机构
第一节 开口机构 1.综框联动式凸轮开口机构
(以织制平纹为例)
(1)作用原理 a.一个凸轮与吊综分别控制一页综框的下降、 上升。当织制平纹组织时,需要两个凸轮呈 180°相位差共轭配置,来控制平纹的两页综框。
b. 转子5受凸轮2大半径作用被压下时,综框10 下降;同时另一个转子4受凸轮1小半径作用而 上升,综框9通过辘轳8受吊综带的拉动而上升, 如此形成了一次开口。 c.梭口的高度由凸轮的大小半径之差及踏综杆 作用臂的长短来决定。 d.综框的运动规律由凸轮的外廓曲线形状决定。
凸轮机构设计及其动态仿真
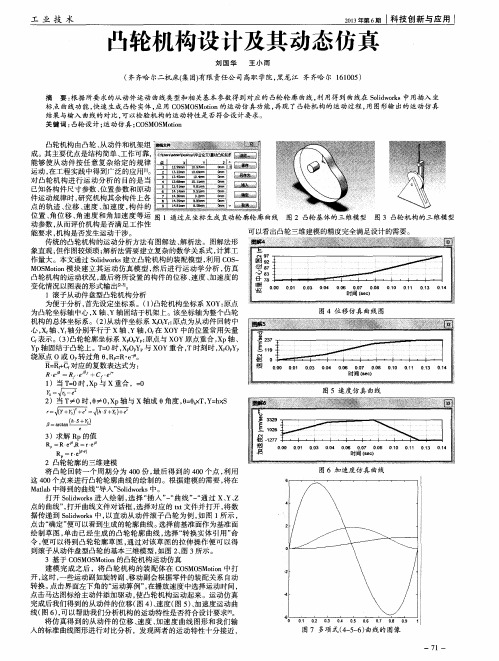
标 点 曲 线功 能 , 快 速 生成 凸轮 实体 , 应用 C O S M O SMo t i o n的 运 动仿 真 功 能 , 再现 了 凸轮机 构的 运 动过 程 , 用 图形输 出 的运 动 仿 真 结 果与 输 入 曲线 的 对 比 , 可 以检 验机 构的 运 动特 性是 否符 合设 计 要 求 。 关 键词 : 凸轮设 计 ; 运 动仿 真 ; C O S MO S Mo t i o n
R. e ∞ : R . e j 4 - C . e
图 4 位 移 仿真 曲线 图
1 )当 T = 0 时, x p与 x重合 ,= 0
:
图 5 速度 仿 真 曲线
2 )当 T ≠0时 , 0 ≠0 , X p 轴与 x轴成 0 角度 , 0 = 0 h X T , Y = h s
为 凸轮 坐 标 轴 中心 , x轴 、 Y轴 固结 于机 架 上 。该 坐标 轴 为 整个 凸轮 机构的总体坐标系 。( 2 ) 从动件坐标系 x f o f Y : 原点为从动件回转 中 心, X 轴、 Y f 轴分别平行于 x轴 、 Y轴 , O 在X O Y中的位置常用矢量 c 表示 。( 3 ) 凸轮轮廓坐标系 x P ( ) P Y : 原点与 X O Y原点重合 , x p轴、 Y p 轴 固结 于凸 轮上 。T = 0时 , x P 0 P Y 与X O Y重 合 , T时刻 时 , x P 0 P Y 绕 原点 0或 0 转过角 0 , R FR ・ e 。 R = R f + C , 对 应 的复 数表 达 式 为 :
图 6加 速 度仿 真 曲 线
图 7 多项 式 ( 4 - 5 — 6 ) 曲线 的 图像
一
71—
科技创新与应用 I 2 0 1 3 年 第6 期
凸轮——连杆机构运动的动态模拟设计方法

凸轮——连杆机构运动的动态模拟设计方法
许镇
【期刊名称】《机械设计》
【年(卷),期】1990()2
【摘要】本文从以下三方面论述了在Apple—Ⅱ微机上进行凸轮—连杆机构运动的动态模拟设计方法。
(1)在建立旋转坐标系概念基础上,利用约束方程法直接确定
机构运动时的各种位置。
(2)对机构进行旋转矩阵变换的原因及方法。
(3)利用高分
辨率图形第一、二页画机构运动动态图时,存在的问题及解决办法。
本文编制了程
序设计框图,并通过实例打印出凸轮转动不同φ角时,凸轮—连杆机构的运动状态图。
本文虽只打印出凸轮—连杆机构中连杆上任意点F的运动轨迹,但实际上却提供绘
制该凸轮—连杆机构连杆曲线图谱的设计程序。
【总页数】4页(P30-33)
【关键词】凸轮;连杆机构;动态模拟;设计
【作者】许镇
【作者单位】天津理工学院
【正文语种】中文
【中图分类】TH112.1
【相关文献】
1.基于UG软件的串联式凸轮连杆机构的设计方法与运动分析 [J], 薛小雯;蔡小华
2.凸轮连杆机构的运动分析方法探讨 [J], 周光伟
3.一种实用凸轮连杆机构运动分析的方法 [J], 张景霞;王润孝;于江
4.凸轮—连杆机构运动的动态模拟设计方法 [J], 许镇
5.直线往复运动的固定凸轮连杆机构的优化设计 [J], 吕庸厚;周榴明
因版权原因,仅展示原文概要,查看原文内容请购买。
凸轮机构及其设计(1)(2)
〔1〕增大基圆半径;
〔2〕采用正配置.
〔3〕增大滚子半径.
3.滚子推杆滚子半径的选择和平底推杆平底尺寸的确定 〔1〕滚子推杆滚子半径的选择
rT
内凹轮廓
理论轮廓曲线
外凸轮廓
轮廓正常
轮廓正常
a rT
轮廓变尖
rT
实际轮廓曲线
a
轮廓失真
a
rT
a rT
rT
rT
rT rT
arT0
a rT0
120º 60º 90º 90º
基各分各条圆点等运光①r的分动0②③滑④从点和角设选动占偏曲等确,计比确将件据距分定线例步定的的圆各位反.尺反骤位位e移转尖.转置置曲后l顶后.,.线从作点对及动位应反连件移于向尖接曲各等顶线成分等在、一
15 15
1414
13 13 12
11
12
10
A
O kkk91k1011k2k1k381k47kk61k5 5kk4k3k21
见课本P161图9-19
5〕、对心平底直动从动件盘形凸轮轮廓线的设计
已知凸轮的基圆半径r0,角速度 和从动件的 运动规律,设计该凸轮轮廓曲线.
s
8
7
5
3
1
9 10 11 12
13 14
1 3 5 7 8 9 11 13 15
120º 60º 90º 90º
δ
A
O
设计步骤
①③ 选确定比反例转尺后平l,底作与位导移路曲中线心和线基的圆交
9
11
10 9
3〕、对心滚子直动从动件盘形凸轮廓线的设计
已知凸轮的基圆半径r0,滚子半径rT、凸轮 角速度 和从动件的运动规律,设计该凸轮轮廓 曲线.
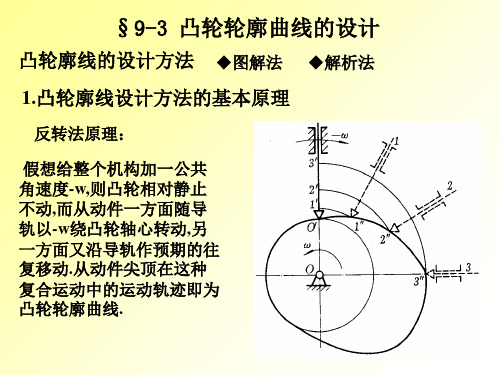
凸轮机构及其设计

h
1
作者:潘存云教授
δ
δ
δ
-∞
2).二次多项式(等加等减速)运动规律 位移曲线为一抛物线。加、减速各占一半。
推程加速上升段边界条件:
起始点:δ =0,
中间点:δ =δ
1
s=0, v= 0 /2,s=h/2
求得:C0=0, C1=0,C2=2h/δ21 加速段推程运动方程为:
s =2h/δ21 δ2 v =4hω /δ21 δ a =4hω2 /δ21
在平面连杆机构中,导杆机构的α=?
ω r0
O n
2)导杆机构 传动角恒等于90° 有效分力: F’ =Fsinγ
复习:平面连杆机构的压力角和传动角 压力角:从动件上受力点的速度方向与该点的受力方向 之间所夹锐角。用α表示 切向分力 : F’= Fcosα ( 有效分力) α → F ’↑ 法向分力: F”= Fsinα 传动角:压力角的余角。 用γ表示 B
2)理论轮廓为外凸曲线
ρ rT ρ
a
轮廓正常
ρ > rT ρa=ρ-rT >0 轮廓变尖
rT
ρ
轮廓失真
rT
ρ
作者:潘存云教授
设计:潘存云
ρ = rT ρ <r T ρa=ρ-rT=0 ρa=ρ-rT<0 对于外凸轮廓,要保证正常工作,应使: ρ min> rT=0.4 r0
-ω
ω
作者:潘存云教授
9’ 11’ 12’
13’ 14’ 9 11 13 15
理论轮廓
设计:潘存云
实际轮廓 设计步骤小结: ①选比例尺μ l作基圆r0。 ②反向等分各运动角。原则是:陡密缓疏。 ③确定反转后,从动件尖顶在各等份点的位置。 ④将各尖顶点连接成一条光滑曲线。 基圆半径 ⑤作各位置滚子圆的内(外)包络线。
剑杆织机

吴 海 洋 月
杨 元 东
沈 小 组 成 员 :
GA747型剑杆织机是GA74系列剑杆织机的最新型号,是在GA743型剑杆织机基础上 增加了ASGT221型多臂装置和选色装置,它结合了GA74系列织机的各种优点,并在此基 础上进行了一系列改进,使产品适应性更加广泛。针对市场需求,着重提高了对厚重织物 的织造能力,适用于从轻薄到中厚的各种织物。 产品特点: 1.GA747占地面积与一台同筘幅的多梭箱有梭织机相当。 2.GA747采用先进的计算机辅助设计,许多机件使用了重量轻强度高的碳织复合材料 和铝合金材料,结构简单可靠。 3.机架和送经机构与有梭织机零件通用性强,容易维修保养。 4.车速比有梭织机提高30-40%。 5.噪音低,可大大改善劳动环境,比同类有梭织机低10-15分贝。 6.品种适应性广泛,可织造从轻薄到中厚型的各种织物。 7.GA747有较高的性能价格比是适合国情的普及型杆织机。 适用范围:GA747主要适宜织造棉、麻、化纤和绢纺等为原料的平纹、斜纹、缎纹 和小提花织物。
三、传剑机构
传剑机构主要有共轭凸轮驱动、空间曲柄连杆驱动、偏心连杆驱 动和空间螺杆驱动等形式。共轭凸轮驱动传剑机构的运动规律可以按 需要设计,灵活性较大,适用于各类剑杆织机,其机构的动程较小, 传动系统的增速较大,制造精度要求高。连杆传剑机构结构简单,制 造较容易,经过优化,也可以设计出较理想的运动规律。螺杆驱动传 剑机构传动链短、结构紧凑、运动平稳。下面是几种常见的传剑机构。
剑杆织机电气式断头自停装置的作用是织机上的经纱发生断头或过度松弛而影响 运转时,相应的断头自停装置就会发出信号,使织机停在一定的主轴角度上,以方便 接头操作。其工作原理可用图1—28说明。 织机上停经杆相当于一个长断触点,当经纱3发生断头或过度松弛时,停经片1落下, 由于其顶部采用斜角形式,停经片向一侧倾斜,使其内侧面靠紧停经杆的外层,导通 停经杆2内外两极,发出断经信号,使织机制停。4为绝缘层。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
M 一
” ,
式中: “ 。 为踏综 杆 1关 于第 O个 节点 的质 量惯性 力矩 .
用 同样 的方法 可 以得到 踏综杆 2的动能表 达式 : T m i 1 s一 + J
第 2 7卷 第 3期
Vo . 7 No 3 12 .
徐 州 工 程 学 院 学 报 (自 然 科 学 版 )
J un l f o r a o Xu h u n t u e f z o I si t o Te h oo y ( t rl ce c s t c n lg Nau a S in e Edt n io ) i
21 O 2年 9 月
Se .2 2 p 01
基 于 动态 特 性 的剑 杆 织 机 共 轭 凸轮 开 口机 构 的设 计 方 法
李 明哲 , 东 日 池 正凡 。 孙 志宏 崔 , ,
(. 1 平壤 机 械 大 学 , 鲜 平壤 朝 9 9 9 ;. 9 0 3 2 东华 大学 机械 工程 学 院 , 海 上 205) 0 0 I
其 中 , 为 踏综杆 O 的弯 曲刚度 ; 为连杆 B D K B K 的拉伸 刚度 ; , 为跟 综框 结构 有关 的刚度 ; K。K K 为按 时 间带周期 性 变 的皮 带 的刚度 ; 为连 杆 B D K。 。 的刚度 ; K 为踏综 杆 O 的弯 曲刚度 ; 为 分别 把 B。 m,
速 度越 高时 , 这种 开 口机 构 的综框 振动 愈激 烈 , 易引 起断 经 , 至会 引起 皮带变 形 和综框 破坏 . 文重新 建 容 甚 本 立 共轭 凸轮 开 口机构 ( 面 简称开 口机 构) 下 的动力 学模 型 , 用矩 阵摄 动法 进行分 析设 计. 并
1 开 口机 构 弹性 振 动 的 一 般化 坐标
2 开 口机构 的 弹 性 振 动 微 分 方 程
2 1 开 口机构 零 件的换 算质 量和 动能 .
把 踏综 杆 1的质量 看作 是分 散在 n 节点 的集 中质量 系统 , 图 3 个 见 .
① ②
2
③ ④
3 4
1
图 3 踏 综杆 的有 限元模 型
用有 限元 方法 确定外 力 P作用 在节 点 时 的其他 各节 点 的位 移 “ ( 一 1 2 … , ) ,, . 第 i 节点 的总位 移为 该点 弹性位 移和 由 刚体 回转 引起 的位 移之 和 , 个 即
・
1 ・ 1
徐州工程学院学报 ( 自然科 学 版 )
21 0 2年 第 3期
踏综 杆 1 踏综 杆 2的质量 换算 到 B 、 z 的质 量 ; ,/分 别把 在综框 1下横杆 的质 量换算 到 D. 和把 和 B 点 T。 r 点 上 横杆 的质 量换 算到 E 点 的质量 ; , 分别 把在综 框 2 横杆 的质 量换算 到 D。 和把上 横杆 的质 量换 算 ms 下 点 到E z点 的质 量 . 每个综 框 的结构 和尺 寸都 一样 , 因此 有 。= 。一 = = 一m.
收稿 日期 : 0 2 0 — 8 2 1 — 4 1 基金 项 目: 西 自然科 学基 金 项 目( 7 8 6 ) 广 0 2 20
作者 简 介 : 明 哲 (9 7 ) 男 , 鲜 人 , 李 15一 , 朝 教授 , 士 , 博 主要 从 事机 械 动 力 学分 析 研 究.
崔 东 日(9 6 , , 鲜 人 , 授 , 士 , 1 6 一) 男 朝 教 硕 主要 从 事新 型 纺 织机 械 研 究. 池正 凡 (9 5 ) 男 , 鲜人 , 16一 , 朝 副教 授 , 士 , 要 从 事 机 械 设 计 与 控 制 研 究 硕 主
关键 词 : 剑杆 织机 ; 凸轮 开 口机构 ; 动微分 方程 ; 阵摄 动法 振 矩
中图分类 号 : 1 TH1 文献标 识码 : TS ; 2 A 文章 编号 :6 43 8 2 1 ) 30 1 —5 1 7 — 5 X(0 2 0 —0 10
GA7 3型 剑 杆 织 机 的 开 口 机 构 由 于 结 构 简 单 且 成 本 低 , 而 广 泛 应 用 在 各 种 织 机 上 口 . 是 当织 机 的 4 因 但
弹性位 移 ;。为 综 框 1上 E q 点 的 弹性 位
移 ; 为综 框 2上 E q 。点 的弹性 位移 ; 为 g
连杆 2端点 D 的弹 性位 移 ; 为踏 综杆 2 q 端点 B 的弹性位 移 .
图 1 共 轭 凸轮 开 口机弹性 震 动模 型
摘要 : 新建 立 了共轭 凸轮开 口机 构 的动力 学模 型 , 成相 应 的弹 性振 动微 分 方 程. 矩 阵摄 重 组 用
动法分 析该微 分 方程 , 并设计 织机 的开 口机 构. 与传 统 的 求解 方 法 相 比, 算 时 间减 少 2 , 小 计 O 减
综 框 的振 动 以 及 降 低 断 纬 频 率 达 到 6 以上 . 5
共 轭 凸轮开 口机 构 如 图 1所 示 , 弹性 振 动模 型如 图 2 示. 所 其 中 O 和 O B B。是 踏 综 杆 , B D 和 D 是综框 , B。 9 和 是 踏综 杆 1 踏综杆 和 2的 回转 角位 移. 开 口机 构 取 一 般 化 坐 对
标为 q , … , 其 中 ,。 踏 综 杆 1端 q , q. q为 点B 的弹性 位移 ; 为连 杆 1端点 D g 的
“ + r” 1 .
式 中 : ’ 示踏综 杆 1的第 O个 节点 到第 i 节点 的距 离 . r“ 表 个 因此 踏综 杆 l的动能 可表 示为
T 一 + 1
J1 。)
+ M 叫 一 臼, 一 ) ( 叫 .
一
其 中,
一
”1
1 ) ( 筹
( 2)