拖拉机转向梯形机构的MATLAB优化与转向特性分析
FSAE方程式赛车转向梯形的联合优化设计

FSAE方程式赛车转向梯形的联合优化设计张凯;陈盼【摘要】为了提高FSAE方程式赛车弯道车速和弯道稳定性,提出了一种转向梯形联合优化设计方法.首先使用MATLAB软件,建立平面转向梯形运动学模型,进行初步优化.然后使用ADAMS软件建立前悬架和转向系统虚拟样机模型,进一步进行优化.还对转向杆系和悬架导向杆系的运动干涉进行了分析及优化.结果表明,该方法设计出的转向梯形机构方案较好的达到了预期目标,对FSAE方程式赛车转向梯形设计有实际的参考价值.【期刊名称】《汽车实用技术》【年(卷),期】2015(000)004【总页数】3页(P72-74)【关键词】FSAE;转向梯形;虚拟样机;运动干涉【作者】张凯;陈盼【作者单位】长安大学,陕西西安710064;长安大学,陕西西安710064【正文语种】中文【中图分类】U462.1CLC NO.: U462.1 Document Code: A Article ID: 1671-7988(2015)04-72-03 自2010年中国举办第一届大学生方程式汽车大赛(FSAE)以来,我国已经连续举办了5届FSAE比赛。
方程式赛车各方面的设计也日趋成熟,越来越多的新技术应用到了赛车的设计、加工等各个方面。
本文主要针对FSAE赛车转向梯形的优化设计方法进行探索。
目前国内FSAE赛车几乎都是采用的齿轮齿条断开式转向梯形机构,设计方法大多是构建转向梯形数学模型,使用matlab优化工具箱的优化函数进行优化分析。
这种设计方法的数学模型是建立在假设转向梯形为平面的基础上的,而转向梯形实际上是一个空间立体结构,这样就会带来一定的误差。
本文首先建立平面数学模型,使用matlab软件优化后,进一步使用ADAMS软件进行空间转向梯形优化,使优化结果更接近实际情况,减小误差。
本文基于我校2013年FSAE赛车进行设计分析及优化。
1.1 确定优化目标转向梯形设计中,需要首先确定阿克曼转角关系。
运用网格法对汽车梯形转向机构的优化设计
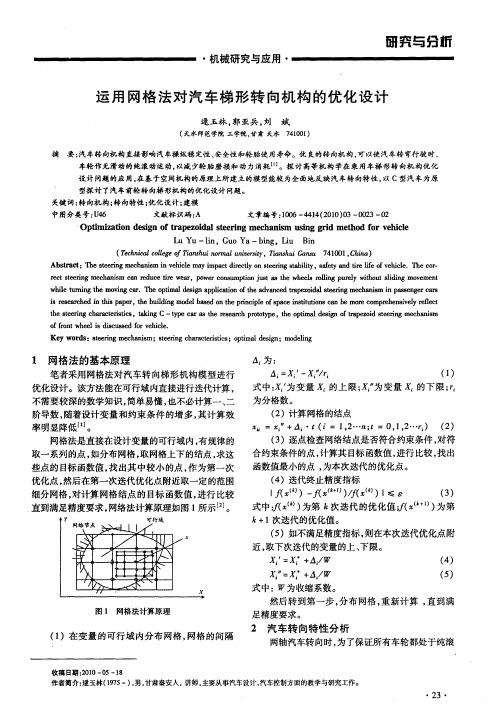
1 网格法的基本原理
笔者采用网格法对 汽车转 向梯形机构模型进行 优化设计。该方法能在可行域 内直接进行迭代计算 , 不 需要 较深 的数 学知 识 , 简单 易懂 , 也不必 计算 一 、 二 阶导数 , 随着设计变量和约束条件 的增多 , 其计 算效 率 明显 降低 … 。
网格法 是直 接在 设计 变量 的可行 域 内 , 有规 律 的
rc s r gmehns 伽 r uet el pw rcnu p o s a ew el rln ue i o t l igm vm n et t i cai e n m e c r w a , o e osm f nj t s h he l gp rl wt u i n oe et d i e " i u t s oi y h sd
车轮 作无滑动的纯滚动运动 , 以减 少轮胎 磨损和 动力 消耗 【 。探讨 高等机 构 学在 乘用车梯 形转 向机构优 化 1 ] 设 计问题 的应用 , 在基 于空间机构的原理上所建立的模型能较为全面地反 映汽车转 向特 性 , C型汽车 为原 以
型探 讨 了汽 车 前 轮 转 向梯 形 机 构 的 优 化 设 计 问题 。
L u Yu—l i n,Gu o Ya—b n i g。Li Bi u n
( eh i l oee fTa su om l n e i ,T nh i as 7 10 , hn Tcn a lg inh i r a i r t i su G nu 4 0 1 C i c cl o n u v sy a a)
关键词 : 向机 构; 向特性 ; 转 转 优化献标识码 : A
文章编号 :0 6— 4 4 2 1 )3— 03— 2 10 4 1 (0 0 0 0 2 0
汽车转向梯形机构最佳方案的设计
有几何关系得
tgΑ= y [ (1 2) 3 S- x ]
tgΒ= y [ (1 2) 3 S+ x ] 整理得:
x=
S3 23
( tgΑ( tgΑ+
tgΒ) tgΒ)
,
y=
S3 ( tgΑ3 tgΒ) tgΑ+ tgΒ
根据最小二乘法将这两条实际特征曲线化成一
条近似的直线, 其斜率如下:
∑∑ K (实) =
a rcco s
d- a3 co s (q0- Α) a2+ d2- 23 a3 d3 co s (q0- Α)
见图 4。
图 4 F ig. 4
2. 5 转向理论关系计算公式
ΒL =
a rc tg
k L
1
+
1 tgΑ
2. 6 转向偏差计算公式
∆= Βs- ΒL 2. 7 公式中符号的意义 K —两主销中心线延长交地面的距离 S—两转向球头销中心与主销中心线垂直相交的距 离
上接第 29 页 洗油过滤器, 同时应注意监视油温、油色和油的粘 度。 出现油温上升, 油色加深的现象常常就是摩擦 片有早期磨损的迹象。 油的粘度是油的动力传递特 性的重要保证。 粘度下降, 会使液粘调速离合器带 负荷能力下降。M C 系列液粘调速器用油的粘度要 求在 40°C 时保持在 45- 55cst 的水平。 必要时, 可 以进行油样分析。
算公式, 杆件按最优区间的数据, 其精度 (即步长) 杆
件长度取 0. 1mm , 其底角按最优化区间的角度数, 其精度 (即步长) 取 0. 1°, 计算出相应数据的转向偏
差, 其偏差取最大值进行比较, 选出其中最小的一
种, 此状况下的杆件长度和底角是最好的, 也即是最
重型特种车辆多轴转向技术的优化设计

中 图分 类 号 : 4 340 文 献 标 识 码 : 文章 编 号 :04 02 02 0 —0 90 U 6 2 d 10 —2620 )10 1—2 c
Opi l sg fHe v p ca hde M ut se rn e h oo y tnun Dein o a y S e ilVe i l —te ig T c n lg l i
m , ) ∑ () ( = q( n
式 中 : 为设计 变量 , 由设计 者根 据 实际情 况确定 ;
= 0~。 ( … 由车辆 的构造决 定 ) ; ( ) 为加权 因子 口 , 』可得 : ,
『 , (。≤ 1 0 ≤ 5) 5 。
1 前 言
心转 动 , 以减少 轮 胎 的磨 损 和 动 力 消耗 [ 即梯 形 。
机 构 要 满 足 左 右 车 轮 的 理 想 转 角 比 , 使 每 个 车 轮 以
近 年来 , 户 对 重型 特 种 车辆 的性 能 要求 已越 用 来越高 。 由于转 向性 能 直接影 响到整 车 的机动灵 活 性、 操纵稳 定性 和使用 经 济性 , 因此对 重型 特种 车辆 转向系统 的设计 提 出 了更 高 的要求 。 重型 特种 车辆 的转 向系统 由于用 户 的使 用要 求 多设计成 多轴 转 向。传统 转 向系统 的设 计方 法是 依 赖 已有 的产 品 。 经过 类 比分析后 进行 局部 的改 动 , 只 能近似地 满足功 能 要 求 , 法提 高整 车 的使 用 经 济 无 性; 零部 件 的结 构 一般得 不到 改进 , 更无法 做到经 济 合 理 。同时 , 随着重 型 特种 车辆 系列 化的 发展 , 品 产
FSAE赛车转向系统设计及性能分析任务书及开题报告资料

附件一毕业设计任务书设计(论文)题目FSAE赛车转向系统设计及性能分析学院名称汽车与交通工程学院专业(班级)车辆工程姓名(学号)胡嗣林指导教师张代胜系(教研室)负责人卢剑伟一、毕业设计(论文)的主要内容及要求(任务及背景、工具环境、成果形式、着重培养的能力)背景:中国汽车工业已处于大国地位,但还不是强国。
从制造业大国迈向产业强国已成为中国汽车人的首要目标,而人才的培养是实现产业强国目标的基础保障之一。
中国大学生方程式汽车大赛(以下简称"FSAE")是中国汽车工程学会及其合作会员单位,在学习和总结美、日、德等国家相关经验的基础上,结合中国国情,精心打造的一项全新赛事。
FSAE活动由各高等院校汽车工程或与汽车相关专业的在校学生组队参加。
FSAE要求各参赛队按照赛事规则和赛车制造标准,自行设计和制造方程式类型的小型单人座休闲赛车,并携该车参加全部或部分赛事环节。
比赛过程中,参赛队不仅要阐述设计理念,还要由评审裁判对该车进行若干项性能测试项目。
在比赛过程中,参赛队员能充分将所学的理论知识运用于实践中。
同时,还学习到组织管理、市场营销、物流运输、汽车运动等多方面知识,培养了良好的人际沟通能力和团队合作精神,成为符合社会需求的全面人才。
大学生方程式赛车活动将以院校为单位组织学生参与,赛事组织的目的主要有:一是重点培养学生的设计、制造能力、成本控制能力和团队沟通协作能力,使学生能够尽快适应企业需求,为企业挑选优秀适用人才提供平台;二是通过活动创造学术竞争氛围,为院校间提供交流平台,进而推动学科建设的提升;大赛在提高和检验汽车行业院校学生的综合素质,为汽车工业健康、快速和可持续发展积蓄人才,增进产、学、研三方的交流与互动合作等方面具有十分广泛的意义。
任务:调研国内外赛车转向系统结构及原理,遵循FSAE竞赛规则完成赛车转向系统设计,转向梯形优化,系统建模与转向性能分析。
工具环境:CATIA/UG AutoCAD ADAMS Visio MATLAB Office办公软件等成果形式:①翻译相关外文文献不少于5000字②优化设计说明书一份③赛车转向系统三维模型一份能力培养:培养和锻炼学生搜集相关资料,综合运用所学汽车设计知识解决实际问题的能力、提高学生软件应用能力、独立完成赛车转向系统设计及相关问题的能力,为从事本专业有关工作打下坚实基础。
机械原理课程设计-----汽车前轮转向机构
最优方案设计
3.传动连接杆
传动连接杆为直角构件,连接传动主杆和这轮系统,将主杆动力传输至车轮转向系统同时约束车轮转动的方向和角度
最优方案设计
4.车轮系统
车轮系统由车轮和转向连杆两部分组成,转轴固定于底板之上,同时与传动连接杆相组合,通过配合连接杆的运动实现两侧车轮系统绕底板固定轴平行转动,保证了转向的精确
方案三:基本结构是一对相互啮合的小齿轮和齿条。 转向轴带动小齿轮旋转时齿条便做直线运动。齿条作为传动主杆,其两端与传动连接杆组合将动力传输给车轮转向系统,并通过连接杆件间的配合协作来控制车轮转向的方向和不同的角度。
方案四:通过转动方向盘,带动方向盘直连的杆件转动,通过直连的末端电控单元检测转动角度和车速等数据,通过蜗轮蜗杆辅助转向。再通过两段万向节的杆件机构传动到底盘上的蜗轮蜗杆,带动四杆机构(双摇杆机构)使车辆转向
感谢观看
延时符
四、最优设计方案
最优方案设计
三维建模
最优方案设计
1.动力齿轮
动力齿轮按照方向盘的不同转动方向而转动,同时与动力主杆上的齿键相咬合推动主杆平行移动
最优方案设计
2.传动主杆
传动主杆为带有齿的平直杆件,通过与齿轮的咬合接收传动齿轮传输的动力平行移动,并根据齿轮转动方向不同改变移动方向,两端与传动连接杆组合,将动力传输至后续结构
三、设计方案展示
方案一:利用螺纹咬合的传动原理,将方向盘的旋转传动为杆件的横向移动,从而带动转向梯形结构转动,使得两侧车轮得以向相同角度,相同方向转动带动车体转向
方案二:汽车前轮转向机构运用平面四杆机构,该转向机构为等腰梯形双摇杆机构,铰链四杆机构左右对称,保证左右轮转弯时有相同特性,通过摇杆的转动带动车轮的等角度转动。
矿用自卸车断开式转向梯形机构影响参数分析
矿用自卸车断开式转向梯形机构影响参数分析摘要|以某矿用自卸车转向梯形机构断裂为例,从几何结构出发,推导出左右转向轮实际角度关系。
详细分析了断裂式转向梯形机构的影响因素对转向盘转角误差曲线的影响规律,揭示了转向梯形机构设计过程中需要优化的关键参数。
影响左右方向盘实际角度关系的参数有:主销中心距K、梯形臂a臂长、梯形底角、铰链点G与前轮轴的距离s、铰链点G与连接线C、D的距离h,分析结果表明:当H、a、E、s四个值变化量相同时,方向盘转角误差变化曲线由大到小的影响程度为H、E、a、s值,s值的变化对方向盘转角影响不大误差变化曲线。
θ值的变化对方向盘转角误差曲线的影响最大。
关键词:断开式转向梯形;轮转角误差;优化设计转向梯形机构设计的主要任务之一是根据给定的条件,通过选择相关参数来设计转向梯形机构。
梯形是为了保证车辆转弯时内外方向盘角度有一定的比例关系,以保证所有的车轮都绕着一个瞬时的转向中心运动,使在不同圆周上运动的车轮做纯滚动运动而不打滑,从而减小车轮与地面之间的滑动摩擦,延长轮胎的使用寿命,提高行车安全性[1]。
然而,受转向梯形机构特性的限制,在所有可行的转向角范围内,实际转向机构的转向角与理论转向曲线的关系曲线并不完全一致。
因此,优化方法只能使两者之间的差异(角度误差)最小化,并在整个转向角范围内合理分配[2]。
在矿用自卸车前轮采用独立悬架的情况下,要求一侧方向盘的上下跳动不影响另一侧方向盘的运动,转向梯形必须采用断开式梯形机构[3]。
在实际应用中,不同的模型具有不同的梯形结构,其影响因素也不同。
以某矿用自卸车断裂式转向梯形机构为例,根据四连杆的几何关系,推导出了左右转向轮的实际角度关系,分析了影响方向盘转角误差变化曲线的因素。
1转向机构的主要结构矿用自卸车转向机构由转向臂、转向横拉杆、转向摇臂和转向液压缸组成。
直线行驶时,转向液压缸两个腔室的油压相等。
左转向时,高压油进入左转向液压缸有杆腔和右转向液压缸无杆腔;右转向时,高压油进入左转向液压缸无杆腔和右转向液压缸杆腔转向液压缸在高压油的推动下使车轮转动。
汽车转向系统及前桥设计解析
目录摘要 (I)Abstract ................................................................................................................................ I I 0文献综述 . (1)0.1转向系统概况 (1)0.2前桥概况 (2)1引言 (4)2汽车主要参数的确定 (4)2.1轴距L (4)2.2前轮距和后轮距 (4)2.3整车整备质量 (5)2.4汽车的装载质量 (5)2.5质量系数 (5)2.6汽车满载总质量 (6)2.7轴荷分配 (6)2.8轮胎选择 (6)2.9最小转弯直径 (7)2.10数据的确定 (7)3转向系统设计 (8)3.1汽车转向基本特性 (8)3.2转向系统设计要求和主要性能参数 (8)3.2.1转向系统设计要求 (8)3.2.2转向系传动比 (9)3.2.3 转向器效率 (11)3.2.4转向系设计参数的确定 (12)3.3循环球式转向器设计 (12)3.3.1转向系计算载荷的确定 (12)3.3.2主要尺寸参数选择 (13)3.3.3螺杆、钢球、螺母传动副 (13)3.3.4齿条,齿扇传动副 (14)3.3.5循环球式转向器零件强度计算 (17)3.4整体式转向梯形机构设计 (18)3.4.1整体式转向梯形机构数学模型分析 (18)3.4.2 基于Matlab的整体式转向梯形机构优化设计 (21)4转向从动桥设计 (27)4.1转向从动桥主要零件参数确定 (27)4.2转向从动桥主要零件设计计算 (29)4.2.1制动工况下的前梁强度计算 (30)4.2.2在侧滑情况下的前梁强度计算 (31)4.2.3转向节在制动和侧滑工况下的强度计算 (33)4.2.4主销与转向节衬套在制动和侧滑工况下的强度计算 (34)4.2.5转向节推力轴承的计算 (36)5结论 (36)参考文献 (37)致谢 (38)汽车转向系统及前桥设计西南大学工程技术学院,重庆400716摘要:随着汽车的普及,对于汽车的各项性能指标和操纵感受也更加重视。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
拖拉机转向梯形机构的MATLAB优化与转向特性分析向铁明;周水庭;何明光【摘要】为使轮式拖拉机转向特性曲线更接近理想的Ackemann转向特性曲线,本研究对轮式拖拉机向左转向运动时,整体式转向梯形机构中铰链四杆机构的运动几何关系进行了推导,再以某四轮轮式拖拉机转向梯形的底角和梯形臂长度作为设计变量,以外侧车轮实际转角与理想转角的累计偏差量的绝对值之和最小作为目标函数,对拖拉机作业的工况进行加权处理,运用MATLAB对转向梯形机构进行了优化设计,优化后转向梯形底角为71.7.,梯形臂长为152.5 mm.根据优化前后参数进行转向分析,验证优化前后转向特性曲线与Ackemann转向特性曲线的差异,最后绘制出优化前后转向时的偏差曲线图.结果表明:该优化设计方法可行,优化后该拖拉机的转向特性曲线更加接近理想转向特性曲线,能更好地减少转向时轮胎的磨损.为轮式拖拉机转向梯形机构的优化设计提供参考.【期刊名称】《云南农业大学学报》【年(卷),期】2015(030)002【总页数】6页(P283-288)【关键词】拖拉机;转向梯形;MATLAB;优化;分析【作者】向铁明;周水庭;何明光【作者单位】厦门理工学院机械与汽车工程学院,福建厦门361024;厦门理工学院机械与汽车工程学院,福建厦门361024;厦门理工学院机械与汽车工程学院,福建厦门361024【正文语种】中文【中图分类】S219.1拖拉机有手扶拖拉机[1-2]、轮式拖拉机[3]、履带式拖拉机[4]和船形拖拉机之分,其中轮式拖拉机广泛采用前轮转向,配备整体式转向梯形机构。
合理的转向梯形机构设计是车轮转向角符合Ackerman 转向原理[5]的关键,而转向机构设计可归结为确定转向机构中的转向梯形的几何参数[6]。
当拖拉机转向梯形机构的梯形臂长度和梯形底角达到某一最优化配置时,拖拉机转向的内、外侧车轮的转角关系曲线越接近纯滚动时的理想特性曲线,拖拉机车轮的磨损就越小,从而保障有良好的转向性能[7]。
轮式拖拉机转向梯形机构的设计方法,传统的图解法[8-9]虽然已经很成熟,但精度不能很好地满足要求,于是学者们开始思考编写优化程序的优化设计方法,如陈启发[10]采用复合形法对4种国产拖拉机的转向梯形机构进行了优化设计,师帅兵等[11]采用FORTRAN语言编写复合形法程序对4种国产拖拉机进行优化设计。
然而,编程要求掌握较多的专业知识、数学知识及计算机程序设计相关知识,难度较大。
随着商业软件(如MATLAB,LINDO,LINGO,ISIGHT等)的成熟,研究设计人员可以借助现成的商业软件进行优化设计,避免了编程的麻烦。
如王博[12]利用MATLAB对KC140断开式转向梯形机构[13]进行了优化设计,李军[14]运用MATLAB优化工具箱对某一国产拖拉机转向梯形机构进行了优化设计,但对拖拉机的行驶和作业工况没有进行加权处理,优化结果与实际存在出入。
目前,铁牛60拖拉机[14]转向时前轮磨损严重,为减少这一磨损,本文将转向梯形的底角和梯形臂长度作为设计变量,以外侧车轮实际转角与理想转角的累计偏差量的绝对值之和最小作为目标函数,用权重系数考虑拖拉机行驶和作业情况,进行加权处理,利用MATLAB软件对转向梯形进行优化设计,并根据优化前后不同的参数进行了转向分析,验证优化设计的科学性。
轮式拖拉机在转向时是靠转向梯形机构来确定内外转向车轮之间的关系的,当转向梯形机构满足理想Ackemann几何学的公式时,则轮胎在地面做纯滚动,轮胎与地面间磨损最小。
Ackemann几何学的公式为θi=arccot(cotθo+K/L)式中,θo为内侧(左侧)转向车轮的转角;θi为外侧(右侧)转向车轮的转角;L为拖拉机的轴距;K为拖拉机两主销中心线的延长线与地面交点之间的距离。
实际上,拖拉机转向机构是不可能完全满足Ackemann几何学的,我们只能尽量让实际机构尽量满足理想关系。
图1为后置式的转向梯形机构左转向时的几何关系,原转向梯形为DCFE,当转向运动后,变成梯形DCHG(虚线所示)。
图中,γ为转向梯形的底角,m为转向梯形臂的臂长,K为两主销中心线延长线与地面交点之间的距离。
从图中可知∠EDC==K,转向前后,横拉杆的长度相同,即,外侧车轮(右前轮)转角为,内侧车轮(左前轮)转角为∠EDG=θo,令∠DCG=β,通过几何关系可求出右前轮(外侧车轮)的实际转角的函数表达式为∠DCG=γ-θo在△GDC中,由余弦定理有:在△GCH 中,由余弦定理有:∠GCH=∠DCF +∠FCH -∠DCG联立式(2)~(9),可求出右前轮(外侧车轮)的实际转角的函数表达式为式中,μ=m/K。
2.1 目标函数的确定转向梯形机构优化设计的目标就是要在规定的转角范围内使实际的内(或外) 轮转角尽量地接近对应的理想内(或外)轮转角[15-16]。
为此,优化设计时,实际因变量与理想值θi相互接近为最优,即|-θi|绝对误差的值越小越好。
根据拖拉机在实际使用过程中:当在良好路面行驶时,内侧车轮转角小角度转弯的概率比较大,大角度转弯的概率较小;当在田间、地头作业时,为满足机动性要求,大角度拐弯仍然很常见,其他角度拐弯行驶的概率相对较小。
为此,我们对工况进行加权处理,引入加权因子,设当5°<θ0<15°时,加权系数为0.5,而其他情况系数为1.0,即这里对误差用相对百分数来表示[17],构建出目标函数f(x)如式(12)所示。
根据几何关系推导可得目标函数的表达式如式(13)所示。
|g(θoi)|×100%根据以上思路和公式,可以绘制出目标函数的流程图。
如图2所示:根据流程图,可以利用MATLAB软件编写相应的程序代码。
2.2 设计变量和约束条件的确定根据机械原理可知:拖拉机梯形臂m的长短影响横拉杆上的受力和与其他部件的干涉,m太小横拉杆上受力将越大,m太大又容易与其他部件发生干涉;此外,拖拉机转向梯形的底角γ值不宜取得过大,如果γ值过大,在转向时会发生前置梯形臂与前轮内侧相碰,前置和后置梯形的横向拉杆还可能与前桥的梁架相碰。
根据相关设计经验[18-20],梯形底角γmin=60°,γmax=90°,梯形臂长m常取mmin=0.10 K,mmax=0.15 K。
几何约束为γmin≤γ≤γmaxmmin≤m≤mmax在转向梯形所构成的四连杆机构当中,最小传动角θmin定义为左梯形臂DG与横拉杆GH所成的最小锐角,若θmin过小,甚至接近“死点”(θmin=0°)时,会导致转向梯形杆系的作用力臂很短,从而使杆系受的推力或拉力过大的不利情况,为避免这种情况,θmin不能太小,通常取θmin≥40°[15]。
在图2中,根据几何关系,可以推导出最小传动角的约束条件为车轮转向达到极限位置时,θ0出现最大值θ0max,由几何关系可得出:式中,Rmin为拖拉机最小转弯半径; a为主销横向偏移距[19],是指从主销轴线的延长线与地面的交点,至同侧车轮中心平面的距离,也称为横向拖距或磨胎半径。
在MATLAB软件中,根据以上约束条件,写出非线性约束函数的程序代码如下:function[c,ceq]=constrainfun(x);K=1202;thetamin=0.6981317; theta0max=0.4537856;G=cos(thetamin)-2*cos(x(1))+cos(x(1)+theta0max);H=(cos(thetamin)-cos(x(1)))*cos(x(1));Q=2*x(2)/K;c=Q-G/H;ceq=[];end3.1 优化结果以mainfun.m为文件名进行存储,定义主函数,给出搜素初始值向量,然后调用MATLAB的fmincon()函数求解此带约束的最优化问题,调用程序代码如下:[x,fval,exitflag,output] =fmincon(@objectfun,x0,A,b,[],[],lb,ub,@constrainfun)运行程序,MATLAB调用fmincon求解最优值,并返回结果x=[71.7,152.5]′,即x1=71.7,x2=152.5是最优解,也就是转向梯形底角为71.7°,梯形臂长为152.5 mm。
优化前后,铁牛60拖拉机转向梯形的相关参数,如表1所示。
3.2 转向特性分析为更加方便的观察和验证优化设计前后,转向特性曲线与理想的Ackemann曲线的差别,在MATLAB中,书写如下程序代码,用于绘制转向特性曲线图。
x1=0.01:0.05:0.75; K=1202;L=2245;y1=acot(cot(x1)+K/L);x2=x1.*180/pi;y2=y1.*180/pi;plot(x2,y2,′r-′);r=1.3089969;m=175;K1=m/K;x1 =0.01:0.05:0.75;A=K1*(1-2*cos(r)*cos(r))+2*cos(r)-cos(r-x1);B=1+K1^2-2*K1*cos(r-x1);C=K1*sin(r-x1);y3=acos(A./sqrt(B))-r+asin(C./sqrt(B));x3=x1.*180/pi;y33=y3.*180/pi;hold on;plot(x3,y33,′k-′);r=1.251;m=152.5;x1 =0.01:0.05:0.75;A=K1*(1-2*cos(r)*cos(r))+2*cos(r)-cos(r-x1);B=1+K1^2-2*K1*cos(r-x1);C=K1*sin(r-x1);y4=acos(A./sqrt(B))-r+asin(C./sqrt(B));x4=x1.*180/pi;y44=y4.*180/pi;hold on;plot(x4,y44,′b-′);为了更加方便对转向特性曲线图进行分析,把数据文件导入到Origin软件进行绘图分析。
某拖拉机优化前后的内、外侧车轮转角的关系曲线如图3所示。
从图3可以看出,车轮向左转向时,随着内侧车轮转角的增大,外侧车轮转角也相继增大。
对比优化前、后的转向特性曲线可以发现,优化后的转向特性曲线比优化前的转向特性曲线更加接近于理想转向特性曲线,这说明车轮转向时,轮胎的磨损情况将在优化后得到一定的改善。
图4所示的偏差曲线,即实际曲线减去理想曲线的值,进一步证明了本次优化的可行性。
图中,最上面带方框标记的线为优化前的偏差曲线,下面带圆圈标记的线为优化后的偏差曲线。
当内侧车轮最大转角为34.95°时,优化前的最大偏差的绝对值为1.89°,偏差率为4.64%;当内侧车轮最大转角为26.36°时,优化后的最大偏差的绝对值仅为0.83°,偏差率仅为2.04%。