履带车辆行驶理论
履带行驶1
驱动链轮: 作用:卷绕履带,使机械行驶。 材料:碳素钢或低碳合金钢, 齿面热处理 硬度 组合式驱动轮 驱动轮: 组合式驱动轮: 齿圈与轮毂组成。 。 齿圈由几段齿圈节用螺钉 固定在轮毂上。
支重轮: 支重轮: 功用:支承机体重量,并在履 带节上滚动,夹持履带。 材料:支重轮轮体采用锰钢。 轮体分两段 两段焊接而成, 两段 轮边有凸缘,起夹持 履带作用。 浮动油封:防止泥沙进入或 浮动油封 润滑油外泄。
张紧装置: 张紧装置 由于销轴磨损会使节距增大,并使履带 伸长,影响行驶性能。 履带张紧度的调整方法: 履带张紧度的调整方法 加油 张紧 放油 变松
1.张紧杆,2放油螺塞,3液 压缸,4活塞,5张紧弹簧, 6弹簧前座,7定位套管,8 弹簧后座,9调整螺母,10 垫片,11前盖,12油嘴
矮履刺型(C): 切入土中较浅, 适宜在松软岩 石地面。 钝角型(B):较 深地切入土中
3栋412宿舍
组长:覃盛 设计员:李志强 主讲:梁宏胜 情报员:周颖杰、陈海立、 庞德恒
履带式行驶系 履带式行驶系
功用:支承机体、行 驶。 组成:驱动链轮、引 导轮、支重轮、 托轮、履带、张 紧装置、台车架。 特点:接地比压小、 附着性能和通过 性能好;行驶速 度低、机动性较 差。
刚性悬架:机体重量完全经刚性元件传递给支重轮的悬架。 刚性悬架
托轮: 托轮 功用: 功用:托住履带,防止下垂 量过大;防止履带侧向 滑落。 托轮的安装: 托轮的安装: 托轮轴夹紧在托轮架中 托轮架固定在台车架上方。 所受的载荷较小,尺 寸较小。一般两个托轮
导向轮: 导向轮 功用:支撑履带,引导履带, 防止滑脱。 1)导向轮是铸造的,径向断 面呈箱型 2)通过两个滑动轴承装在导 向轴上 3)轴的两端装在左、右两个 支承滑块内 4)滑块安装在台车架上的导 向板上; 5)导板盖与滑块之间装有调 整垫片。
履带行驶系

22 /34
图a)为单齿履带板。是推土机常用的结构,有一条较高的履齿,能获 得大牵引力。 图b)为双齿履带板。有两条等高的履齿,可以防止由于重载引起的履 带板弯曲,车辆转向性能好,主要用于履带式装载机。 图c)为半高三齿履带板。三条履齿中有两条较低,这样它兼有单齿型 的牵引力大,双齿型的转向性能好的优点,使用于装载、挖掘作业的履 带装载机。 图d)为等高三齿履带板。有三条等高的履齿,转向性能好,主要用于 坚硬场地作业的履带装载机。 图e )为雪地用履带板。履齿顶部做成凸起状或凹形,履带板中央穿孔, 在雪地或冰上作业时,可获得较大的地面抓力和防滑能力。 图f)为岩石地用履带板。履齿两侧带加强筋,起强化履带板和防止车 辆侧滑的作用。 图g)为平滑履带板。无履齿,主要供车辆在公路行驶时装用,以免破 坏路面。 图h)为湿地用履带板。履带板宽度大,接地面积大,端面有三角形和 圆弧形等,以改善车辆在潮湿土壤上作业时的牵引附着性能,主要供湿 地推土机用。 图i)为橡胶块履带板。供在街道上行驶时使用,可以有效地防止噪 声和保护路面。
履带行驶系由车架(或机架)、行走装置和悬架 三部分组成。
行走装置由驱动链轮、支重轮、托链轮、张紧轮(或称导 向轮)、履带(统称“四轮一带”)、台车架、张紧装置 等组成。 履带式与轮式行驶系相比有如下特点: 1.支承面积大,接地比压小。因此履带车辆适合在松软或 泥泞场地进行作业,下陷度小,滚动阻力也小,通过性能 较好。 2.履带支承面上有履齿,不易打滑,牵引附着性能好,有 利于发挥较大的牵引力。 3.结构复杂,重量大,运动惯性大、缓冲性能差、“四轮 一带”磨损严重、造价高、寿命短。因此履带车辆的行驶 速度不能太高,机动性能也较差。 另外履带车辆还可在高温场地工作,加之其“低比压”、 “大牵引力”的突出优点是轮式车辆无法代替的。
履带车辆的转向理论
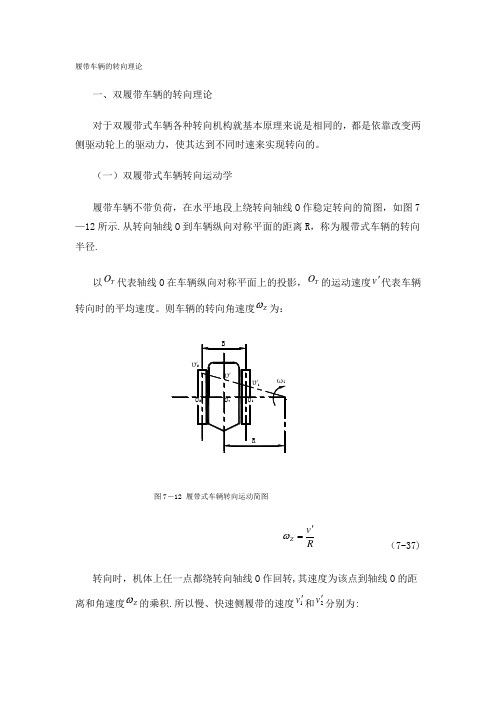
履带车辆的转向理论一、双履带车辆的转向理论对于双履带式车辆各种转向机构就基本原理来说是相同的,都是依靠改变两侧驱动轮上的驱动力,使其达到不同时速来实现转向的。
(一)双履带式车辆转向运动学履带车辆不带负荷,在水平地段上绕转向轴线O 作稳定转向的简图,如图7—12所示.从转向轴线O 到车辆纵向对称平面的距离R ,称为履带式车辆的转向半径.以T O 代表轴线O 在车辆纵向对称平面上的投影,T O 的运动速度v '代表车辆转向时的平均速度。
则车辆的转向角速度Z ω为:图7-12 履带式车辆转向运动简图R v Z '=ω (7-37)转向时,机体上任一点都绕转向轴线O 作回转,其速度为该点到轴线O 的距离和角速度Z ω的乘积.所以慢、快速侧履带的速度1v '和2v '分别为:Z Z Z Z B v B R v B v B R v ωωωω5.0)5.0(5.0)5.0(21+'=+='-'=-=' (7-38)式中:B —履带车辆的轨距。
根据相对运动原理,可以将机体上任一点的运动分解成两种运动的合成:(1)牵连运动,;(2)相对运动.由上可得:B R B R v v 5.05.021+-=''(二)双履带式车辆转向动力学 1、牵引平衡和力矩平衡图7-13给出了带有牵引负荷的履带式车辆,在水平地段上以转向半径R 作低速稳定转向时的受力情况(离心力可略去不计)。
转向行驶时的牵引平衡可作两点假设:(1) 在相同地面条件下,转向行驶阻力等于直线行驶阻 力,且两侧履带行驶阻力相等,即:ff f F F F 5.021='='(2)在相同的地面条件和负荷情况下,γcos x F 相当于直 线行驶的有效牵引力KP F ,即:图7-13 转向时作用在履带车辆上的外力γcos x KP F F =所以回转行驶的牵引平衡关系为:K KP f K Kx f f K KF F F F F F F F F F =+='+'+'+'='+'212121cos γ (7-39)设履带车辆回转行驶时,地面对车辆作用的阻力矩为μM ,在负荷xF 作用下总的转向阻力矩为:γμsin x T C F a M M += (7—40)式中:T a —牵引点到轴线21O O 的水平距离。
履带式摊铺机直线行驶跑偏量的理论计算及检测控制
( 上 科 技 股 份 有 限 公 司研 究 院 , 苏 徐 州 2 10 ) 徐 江 206
摘
要: 对履带式摊铺机直线行驶性能进行 了分析 , 提出了一种检测实际跑偏量的方法。利用此方法,
结合实际施上作业工况更高的精度要求 , 对其相应跑偏量的检测控制进行 了详细计算及分析。 关键词 : 直线行驶 ; 几何方法; 跑偏量 ; 检测
维普资讯
路面机械_ 施工技术 与
P v me t Ma hn r & C n t c in T c n lg a e n c ie y o s r t e h oo y u o
一
履 带 式 摊 铺 机 直 线 行 驶 跑 偏 量 的 理 论 计 算 及 检 测 控 制
b i g B sd o h ih rd ma d o cu l r o dt n t emeh d i no eu eu n c luaiga d en . a e n tehg e e n fa ta k c n i o , h to s lr sf li ac lt n wo i n
—
/
1 履 带 式 摊 铺 机 直 线 跑 偏 量
摊铺机 在摊 铺 工况 ~ F的直 线跑 偏量 ,是 由于摊 铺 机左 右履 带 均速度 存 在 差异 而造 成 的 ,反映 了摊铺 1
』 I 。 广 . d I IL 1 f 壹
L n —。 . , J
跑r线 道f I 心
一
—
—— 一
l
机行驶控制系统的技术水平和控制精度 , 是摊铺机 的
一
项t要技术指标 国家标准G / 6 7 ( BT 127  ̄青混凝土摊铺机》 规定 :
系统理论在履带车辆单边通过障碍行驶特性分析中的应用
【 车辆工程技术 】
d i1 .9 9j s . 7 — 122 1 . . 6 o:0 6/.s 1 3 3 4 . 1 90 3 in 6 0 0 0
系统理 论在履 带车辆单边通过 障碍
行 驶 特 性 分 析 中 的应 用
李军, 李强 , 靖凯 周
( 甲兵 工 程 学 院 , 京 10 7 ) 装 北 0 0 2
2 1 年 第 9期 01
农 业装 备与 车辆 工程
A R C L U A Q IM N G IU T R LE U P E T& V H C EE G N E I G E IL N IE RN
Nห้องสมุดไป่ตู้ 9 01 . 2 1
( 总第 2 2 4 期)
( o l 4 ) T t l 2 2 ay
L u ,i i gZ o i k i i n L a ,h uJ g a J Q n n
( c d m f r rd F reE gn e n , e ig 10 7 , hn ) A a e yo moe oc n ie r g B i n 0 0 2 C ia A i j
摘要 : 以高速履 带车辆单边通过 障碍翻车事故 为背景 , 利用 系统科 学和动力学理论与方法对 高速履带车辆通过
单边障碍过程的行驶特性进行 了系统分析 , 建立分岔模型。采 用定性描述和定量描述结合的方法, 建立高速履 带车辆单边通过障碍时的行驶特性状态方程及过程分析数 学表达式。运用数 学计算工具对各过程、 不同训练道 路参数 、 不同初速等情况的状态进行 了数值计算分析 , 绘制 出相关图形。分析结果表 明训练道路 参数设置不同,
发生事故的临界数值 不同. 即速度 出现分岔点不 同, 突变点不同。该结果为高速履带车辆单边通过 障碍事故预
履带运输车安全技术操作规程

履带运输车安全技术操作规程第一章绪论第一条为了确保履带运输车的安全操作,保障人员的生命财产安全,减少事故发生的可能性,提高运输效率和质量,制定本规程。
第二条本规程适用于各类履带运输车的安全操作。
第三条术语解释:1. 履带运输车:指装有连续条带履带的机动运输工具。
2. 驾驶员:指操纵履带运输车行驶的人员。
第二章履带运输车驾驶员的安全操作要求第四条履带运输车驾驶员应具备以下条件:1. 年满18周岁,并具有合法驾驶履带运输车的驾驶证;2. 了解并掌握履带运输车的结构、操作方法和安全规程;3. 能够正确识别和判断道路条件以及车辆的状况,并采取合适的措施;4. 具备良好的驾驶技术和安全意识,能够迅速应对突发事故和紧急情况。
第五条履带运输车驾驶员应遵守以下安全操作要求:1. 严格按照交通法规和道路交通安全管理要求行驶,不超速、不闯红灯、不逆行等违法行为;2. 不酒后驾驶,不吸毒驾驶,保持清醒和良好的体力状态;3. 按照规定的路线行驶,不擅自改变行驶方向和速度;4. 保持车辆整洁,定期检查和维护车辆,确保车辆技术状况符合要求;5. 遵守安全操作规程,正确使用车辆的各种装置和设备;6. 注意观察道路情况,避免与其他车辆和行人发生碰撞;7. 保持与前后车辆的安全距离,随时注意后方车辆的动态。
第三章履带运输车行驶安全措施第六条在行驶过程中,履带运输车驾驶员应采取以下安全措施:1. 在夜间和恶劣天气条件下,使用车辆的灯光和信号装置,确保行驶安全;2. 驾驶员应时刻保持警觉,注意前方和周围环境的变化;3. 当遇到行人、动物等障碍物时,及时减速或停车避让;4. 在弯道、坡道、斜坡等特殊路段,按照安全规定行驶;5. 遵守交通标志和标线,避免超车和占用对向车道;6. 使用转向灯提前示意其他车辆知道自己的行车意图。
第四章履带运输车紧急情况处理第七条当履带运输车发生紧急情况时,驾驶员应采取以下措施:1. 对于突发事故,应及时报警并保护现场,防止二次事故的发生;2. 当车辆突发故障,驾驶员应立即停车,并采取适当措施,保证行车安全;3. 对于紧急制动情况,驾驶员应立即采取制动措施,并避免与后方车辆发生碰撞;4. 当遇到火灾、爆炸等危险情况时,驾驶员应及时疏散车辆和乘客,并通知有关部门。
《履带车辆行动系统动力学仿真分析》
《履带车辆行动系统动力学仿真分析》一、引言随着科技的发展,履带车辆在军事、工程、农业等多个领域得到了广泛应用。
其行动系统的性能直接关系到车辆的整体运行效率和安全性。
因此,对履带车辆行动系统进行动力学仿真分析,对于优化车辆设计、提高运行性能具有重要意义。
本文将针对履带车辆行动系统进行动力学仿真分析,以期为相关研究提供参考。
二、履带车辆行动系统概述履带车辆行动系统主要由履带、驱动轮、导向轮、张紧装置等组成。
其中,履带是车辆与地面接触的主要部分,驱动轮为车辆提供动力,导向轮则控制车辆的行进方向,张紧装置则保证履带的张紧度。
这些部件的协同作用,使得履带车辆能够在复杂地形中稳定行驶。
三、动力学仿真分析方法动力学仿真分析是通过对履带车辆行动系统的运动过程进行数学建模,利用计算机软件进行模拟分析的方法。
本文采用多体动力学理论,结合履带车辆的实际结构和工作特点,建立动力学模型。
通过输入各种工况下的驱动力和阻力数据,模拟车辆在不同地形和速度下的行驶情况,从而分析行动系统的动力学性能。
四、仿真结果与分析1. 仿真结果通过动力学仿真分析,我们得到了履带车辆在不同工况下的行驶数据,包括速度、加速度、驱动力、阻力等。
同时,我们还观察到了履带与地面接触的应力分布情况,以及各部件的运动状态。
2. 数据分析根据仿真结果,我们可以对履带车辆行动系统的动力学性能进行分析。
首先,通过对不同工况下的驱动力和阻力进行分析,我们可以了解车辆在不同地形和速度下的行驶性能。
其次,通过对履带与地面接触的应力分布进行分析,我们可以了解履带的磨损情况和承受能力。
最后,通过对各部件的运动状态进行分析,我们可以评估行动系统的协调性和稳定性。
五、结论与展望1. 结论通过动力学仿真分析,我们得到了履带车辆行动系统在不同工况下的运行数据和性能评估。
结果表明,行动系统的设计在一定程度上能够满足车辆在各种地形和速度下的行驶需求。
然而,仍存在一些需要改进的地方,如提高履带的耐磨性、优化驱动轮和导向轮的协调性等。
《履带车辆行动系统动力学仿真分析》
《履带车辆行动系统动力学仿真分析》一、引言随着计算机技术的飞速发展,动力学仿真在各种工程领域中扮演着越来越重要的角色。
特别是在履带车辆行动系统的设计与优化中,动力学仿真分析成为了不可或缺的工具。
本文旨在通过动力学仿真分析,深入探讨履带车辆行动系统的性能特点及优化方向。
二、履带车辆行动系统概述履带车辆行动系统是一种通过履带与地面接触并产生推进力的移动系统。
其核心组成部分包括履带、驱动系统、悬挂系统等。
这种行动系统因其良好的越野性能和较高的承载能力,在军事和民用领域均有广泛应用。
三、动力学仿真模型建立为了对履带车辆行动系统进行动力学仿真分析,首先需要建立相应的仿真模型。
模型应包括车辆的质量、惯量、履带与地面的接触力等关键参数。
同时,还需要考虑车辆在不同地形、不同速度下的运动状态,以及驱动系统和悬挂系统的动态响应。
在建模过程中,应采用多体动力学理论,将车辆各部分视为相互连接的刚体或弹性体,通过力学方程描述其运动状态。
同时,还需要考虑地形的复杂性,如坡度、凹凸不平的路面等对车辆运动的影响。
四、仿真结果分析通过对建立的模型进行仿真分析,可以得到车辆在不同条件下的运动状态及性能参数。
这些参数包括车辆的行进速度、加速度、转向半径、履带张力等。
通过对这些参数的分析,可以得出以下结论:1. 履带车辆的行进速度受地形、驱动力及悬挂系统的影响较大。
在平坦的路面上,车辆的行进速度较高;而在崎岖不平的地形上,车辆的行进速度会受到较大影响。
2. 悬挂系统的设计对车辆的越野性能有显著影响。
合理的悬挂系统设计可以减小车辆在行驶过程中的颠簸程度,提高乘坐舒适性及行驶稳定性。
3. 驱动力的大小直接影响车辆的加速性能和最大行进速度。
在坡度较大的地形上,驱动力的大小对车辆的爬坡能力具有决定性影响。
4. 履带张力是影响履带车辆行驶性能的关键因素之一。
适当的履带张力可以保证履带与地面的良好接触,提高车辆的牵引力和行进稳定性。
五、优化建议及展望根据仿真分析结果,为进一步提高履带车辆行动系统的性能,提出以下优化建议:1. 优化驱动力分配策略,以提高车辆在不同地形条件下的适应能力。
履带的原理
履带的原理
履带作为一种重要的装置,被广泛应用于各种交通工具和工程设备中,其原理是将车辆或设备的重量通过履带带动,从而实现前进或者作业的目的。
履带的原理主要是利用传动轮、履带链和支撑轮等部件相互协作,能够克服复杂地形,提供更大的牵引力和通过性。
履带的传动原理主要是依靠传动轮和履带链的相互配合。
传动轮是通过发动机或者驱动装置提供动力,并通过其自身的转动来驱动履带链的运动。
履带链则将车辆或设备的重量通过链条传递给地面,从而提供牵引力和支撑力。
这样一来,车辆或设备就能够在不同地形和工况下保持稳定的运动和作业。
履带的支撑原理是通过支撑轮和负重轮的配合来实现的。
支撑轮是安装在车辆或设备的底盘上,用于支撑和传递履带链的重量和牵引力。
支撑轮通常采用钢制的结构,能够承受较大的载荷并保持稳定的旋转。
负重轮则是用来支撑履带链的底部,能够提供整个履带系统的支撑和稳定性。
履带的原理在不同类型的车辆和设备中有着不同的应用。
在军事车辆中,履带通常能够提供更大的承载能力和通过性,能够在复杂的地形和恶劣的环境下保持稳定的运动和作战能力。
在工程设备中,履带则能够提供更大的牵引力和作业能力,例如挖掘机、推土机等设备通常都采用履带来实现其作业功能。
总的来说,履带的原理主要是利用传动轮、履带链和支撑轮等部件相互配合,能
够实现车辆或设备的牵引、支撑和作业等功能。
履带作为一种重要的装置,已经在各种领域得到了广泛的应用,并且在未来的发展中将继续发挥着重要的作用。
履带车辆的动力学运动学模型
履带车辆的动力学运动学模型在探索履带车辆的动力学运动学模型时,我们将以人类的视角来描述这一过程。
履带车辆是一种特殊的交通工具,它具有独特的设计和机械结构,使其能够在各种地形条件下行驶。
让我们一起来了解它的动力学和运动学原理。
动力学是研究物体运动和力的学科,而运动学则研究物体的运动状态和轨迹。
履带车辆的动力学运动学模型涉及到其推进力、摩擦力、速度和加速度等因素。
履带车辆的推进力是使其前进的关键。
它通常由发动机提供,通过传动系统传递到履带上。
这种推进力可以通过控制油门来调节,从而改变车辆的速度。
当油门增加时,发动机输出的功率增加,推进力也会增加,车辆加速前进。
摩擦力是履带车辆运动中一个重要的因素。
摩擦力产生于履带与地面之间的接触面,它是使车辆能够在不滑动的情况下前进的关键。
摩擦力的大小取决于地面的粗糙程度和履带的材质。
当地面较滑时,摩擦力较小,车辆容易打滑;而当地面较粗糙时,摩擦力较大,车辆能够更好地抓地。
速度和加速度是描述履带车辆运动状态的重要指标。
速度是指车辆在单位时间内前进的距离,可以用公里/小时或米/秒来表示。
加速度则是指车辆在单位时间内速度的变化量,可以用米/秒²来表示。
通过控制推进力的大小和方向,可以改变车辆的速度和加速度。
在履带车辆的动力学运动学模型中,还要考虑到其他因素的影响,如车辆质量、车辆的阻力和地形的坡度等。
车辆质量越大,需要更大的推进力才能使其前进;而阻力越大,车辆的速度和加速度就会受到更大的影响;地形的坡度也会对车辆的前进产生影响,车辆在上坡时需要更大的推进力,而在下坡时则可能需要制动力来控制速度。
履带车辆的动力学运动学模型是一个复杂而又有趣的领域。
通过对推进力、摩擦力、速度和加速度等因素的研究,我们可以更好地理解和控制履带车辆的运动行为。
这不仅有助于改进车辆的设计和性能,还为我们探索更广阔的交通工具领域提供了有益的启示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
滑转率
履带相对地面向后运动的程度通常用滑转 率δ来表示,它表明了由于履带向后运动而 引起的车辆行程或速度的损失,并可由下 式计算: δ =(lT-l)÷lT=1-(l÷lT) 或δ =(vT-v)÷vT=1-(v÷vT)。
二、履带行走机构的动力学
假设履带车辆在水平地面上作等速直线行 驶 把车辆作为一个整体来考察 对履带单独进行考察 履带行走机构内部阻力分析
履带行走机构内部阻力分析
ቤተ መጻሕፍቲ ባይዱ
1)各链轨节铰链中的摩擦; 2)驱动轮与链轨啮合时的摩擦; 3)导向轮和拖链轮轴承的摩擦; 4)支重轮轴承中的摩擦和支重轮在链轨上 的滚动摩擦。
1)由不变的法向压力(例如由履带的预加张 紧力F0和机器质量G造成的法向压力)所产 生。这部分摩擦力矩与驱动力的大小无关, 相关于拖动行驶时行走机构内部摩擦力矩, 它可用Mr2来表示。 2)由履带的附加张紧力Ft所引起,这部分 摩擦力矩Mr1近似地与驱动力矩成正比,并 可方便地用一效率系数来表示。
二、履带车辆的行驶原理
切线牵引力产生 驱动段效率
切线牵引力产生
为了便于说明行驶原理,参看图1-1所示 图1-1履带式拖拉机行驶原理图
车辆行驶时,在驱动力矩MK作用下,驱动段内产生拉 力Ft即: Ft=MK÷rK。 对车辆来说,拉力Ft是内力,它力图把接地段从支重 轮下拉出,致使土壤对接地段产生水平反作用力。这 些反作用力的合力FK叫做履带式车辆的驱动力,其方 向与行驶方向相同。 参看图1-2所示
影响履带的接地比压的因素
机器重力与垂直外载荷所构成的合力G; 履带接地区段长度L ; 履带宽度b; 由于横向偏心距C ; 为机器纵向偏心距e ; 履带轨距B 。
二、履带接地平面核心域
定义:是履带装置两条履带接地区段几何中心周 围的一个区域。只要机器重心作用在这个区域以 内,履带接地区段沿长度都能承受一定的载荷; 但当机器重心越出这个区域时,则履带接地区段 沿长度方向只有一部分接地面积承受载荷在此情 况下,最大接地比压必然大幅度增加。
§1-5履带车辆的附着性能
一、土壤的剪切应力与位移的关系 二、切线牵引力与土壤剪切应力的关系 三、切线牵引力与滑转率的关系 四、牵引力、试验滑转曲线
一、土壤的剪切应力与位移的关 系
土壤的抗剪强度 库伦剪切强度公式 剪切应力—位移曲线
土壤的抗剪强度
土壤抗剪强度:土壤在剪切力的作用下, 有使土粒与土粒间,一部分土壤与另一部 分之间产生相对位移的趋势,这种相对位 移受土壤抗剪强度的制约。当土壤受到剪 切力时,就会在剪切表面出现抗剪应力τ。 当土壤因受剪切而失效时,抗剪应力达最 大值τm。
滑转速度
履带在地面上的向后运动速度称为滑转速度vj则 可用单位时间内的滑转距离来表示: vj=lj÷t 或vj=lj÷t=(lT-l) ÷t 式中:l—在时间t内,车辆的实际行驶距离; lj—在时间t内,履带相对地面向后运动的距离; lT—在同一时间t内,车辆的理论行驶距离,它可 通过下式计算: lT=rk×ωk×t=(Zk×lt×ωk×t) ÷2 π。
三、履带接地比压与沉陷深度的 关系
M.G.Bekker经验 式 地面土壤特性及机器有关参数对履带沉陷 深度的综合影响 履带沉陷深度的简化计算方法
M.G.Bekker经验 式
Kc P ( K ) Z n b
式中: P—试验压板接地比压,KPa; Z—试验压板沉陷深度,m; KC—土壤粘性成分所决定的变形模量,kN/m n+1; Kυ—土壤摩擦性成分所决定的变形模量,kN/m n+2; b—试验压板宽度,m; n—土壤变形指数。
实际速度
当车辆在实际工作时,履带挤压土壤并使履带在 水平方向有向后运动的趋向。在履带存在向后运 动的情况下,车辆的行驶速度称为实际行驶速度v, 它显然应该是履带的向后速度和台车架对接地链 轨的相对速度的合成速度,亦即: v=(vT-vj) (m/s ) 式中:vj—履带在地面上的向后运动速度(m/s ) 。
牵引力:车辆能够发挥的或地面可以提供 的推力,不是进行工作的有效力。 试验滑转曲线,参看图1—30。
五、影响附着性能的因素
土壤的性质与状态; 履带行驶装置的特点。
§1-3履带接地比压和履带接地平面 和心域
一、履带的接地比压 二、履带接地平面核心域 三、履带接地比压与沉陷深度的关系
一、履带的接地比压
履带的接地比压的定义 影响履带的接地比压的因素
履带的接地比压的定义
履带单位面积所承受的垂直载荷。它直接 决定机器的通过性和工作稳定性。 Pa=G÷(2×b×L) 式中: G—机器重力与垂直外载荷所构成的 合力; L—履带接地区段长度 ; B—履带宽度。
当履带处于图中2所示的位置时,履带速度 最低,等于: V2=ro×ωK×cosβ÷2=V1×cosβ÷2
(m/s )
式中:β—驱动链轮的分度角 β=360°÷Zk; ZK—驱动链轮的有效啮合齿数。
将车辆履带在地面上没有任何滑移时,车辆的平均行驶速 度称为理论行驶速度VT,它在数值上应等于履带卷绕运动 的平均速度,亦即: VT=(Zk×lt×ωk)÷( 2 π )=(Zk×lt×nk)÷60(m/s ) 式中:lt—链轨节矩,m; ωk—驱动轮角速度,l/s; nk—驱动轮转速,r/min。
取驱动轮为研究对象(不及损失),如下图所示:
则有:Ft=F’t cosΨ MK= F’t × rK
取支重轮为研究对象(不计损失),如下图所示:
则有:FK=Ft FΣ水平=
FK-Ft×cosΨ
如果不计损失,推动机体前进的力应该是水平方向受力之 和,即: Ft +FΣ水平= F’t cosΨ +FK-Ft’×cosΨ =FK
一、履带行走机构的运动学
理论速度 实际速度 滑转率
理论速度
参看图1-3
卷绕履带最大速度值
当履带处于图中1所示的位置时,履带速度 达最大值,并等于: V1=ro×ωk (m/s ) 式中:r0—驱动链轮的节圆半径m ; ωk—驱动链轮的角速度l/s 。
卷绕履带最低速度值
j K τ τ m 1 e 土壤的剪切位移; 式中: j—
K—土壤的水平剪切变形模量。
二、切线牵引力与土壤剪切应力 的关系
参看图1—27
三、切线牵引力与滑转率的关系
滑转曲线; 附着重量; 附着力。 参看图1—28
四、牵引力、试验滑转曲线
车辆整体受力分析
参看(图1-5)
此时作用在履带车辆上的各种外部阻力应 与切线牵引力相平衡,亦即: ΣF=FK ΣF—各种外部阻力的总和; FK—切线牵引力。
对履带进行受力分析
参看(图1-6)
根据履带等速运转的平衡条件,在驱动力 矩MK与切线牵引力之 间显然存在着以下的平衡关系: MK×rK=Ft=FK
二、行驶阻力系数
根据大量的实验结果,我们发现车辆行驶 阻力与车辆的使用重量成正比,即:
FR fGs 式中: f—行驶阻力系数; F’R—土壤水平变形阻力,kN; Gs—车辆使用重量,kN;
FR fGs
三、影响行驶阻力的因素
土壤的性质与状态; 车辆使用重量; 履带接地区段长度L ; 履带宽度b; 履带张紧度的影响; 各轮轴承、铰链的密封和润滑情况; 支重轮在连轨上滚动的损失等。
库伦剪切强度公式
库伦根据平面直剪试验结果,把土壤抗剪强度表 示为土壤粒子间的粘着和摩擦两项组成的半经验 公式,即:
式中: τm—土壤抗剪强度;
τ
m
C σ tg
σ—剪切面上的垂直压强; υ—土壤内摩擦角; C—土壤内聚力。
剪切应力—位移曲线
参看图1-25
在脆性土壤上(未经搅动的紧密土壤,如坚实的砂、 粉土、壤土和冻结的雪等)抗剪应力出现“驼峰” 后,再降低到恒定的值,即为剩余剪切应力τr。 在塑性土壤上(松散的土壤,如干砂、饱和粘土; 大多数搅动过的土壤以及干雪等),则剪应力达到 一定值后,基本上不变。对于这类土剪切应力— 位移曲线的关系Janosi公式为:
第一章履带车辆行驶理论
§1-1履带车辆行驶原理 §1-2履带行走机构的运动学和动力学 §1-3履带接地比压和履带接地平面和心域 §1-4履带车轮的行驶阻力 §1-5履带车辆的附着性能
/i/71.html
§1-1履带车辆行驶原理
一、驱动力距与传动系效率 二、履带车辆的行驶原理
一、驱动力距与传动系效率
驱动力矩MK:发动机通过传动系传到驱动轮上的力矩称。 传动系效率ηm : ηm=PK÷Pe=( MK×ωK )÷( Me×ωe )=(MK÷Me) ×im 式中:ωK——驱动的角速度; ωe——发动机曲轴的角速度; Me——发动机的有效力矩。 im——传动系总传动比,它是变速箱、中央传动和最终传动 各部分传动比的乘积。 当车辆在水平地段上作等速直线行驶时,其驱动力矩MK可由下式求得: MK=ηm×Me×im
驱动段效率
由于动力从驱动轮经履带驱动段传到接地段时,中间有动 力损失,如果此损失用履带驱动段效率ηr表示,则履带式 车辆的驱动力FK(以下称为切线牵引力)可表示为: