一种有效的三步运动估计算法
一种新型全局运动估计算法
【 y w rs lblm t net aoi s m t n v l o r r a m n ;P N J o o i o ts g l im ot
1 引 言
全局运 动估计 是指估计视 频序列 中背景运 动规律 , 应用 得很广 泛 , sre编码 如 pi t 全局运 动补偿 编码和 sre图生成 pi t
参数矢量 , ( , 是 0的函数 , , Y) 目标能量 函数定 义 为 R( ) 日
=
进化规戈 是在一个人 口的集合 中不断 收敛的学习过程 .
人 口中的每一个成 员代表 给定 问题寻 优解空 间 中的一个查
找点 : 问题 的求解过程 为: 随机的产生 初始 人 口, 然后在 目标 函数的指 引下 , 使初始解不断 向全局最优解演化 对 目标 函 数只要求能 够计 算 , 不要求连续或进一步可导 。 因此 , 进化计
其中& 是 0 处的 和 () 在 梯度矩阵和Hsa 矩阵 ei sn
岛 = , = ^ 二 十
等, 在基 于运动分割 中全局 运动估计也是 非常重要 的 , 因此 , 研究全局运动估计 是非常有意义的。 由于 目前许多全局运动 估计方法都是基于密度估计的 , 这些方法都 面临这样 两个困 难 : 算代价 高和噪声多 引起 估 汁不 准确 . 计 如何解决计算 量 和估计 精度两者间的矛盾是 当前 的研究热点问题 。 在全 局运 动估计 中, 用 , 表 示某像 素点 在 当前图 像 中的位置 . [ : 用 z , :表示该像 素 在 前一帧 图像 中的对 y 应位置。它们 的对应关系可 以用 6参数仿射参数模型表示
mig 丑 n e u e o g a t n etmain a d w s u e O sa c rp rp r mee Mu l e n w ag — n s i. d c d t kb lmoi si t . n a s t e rh po e aa tr v e o o d ' e o h l i m a c eeae t re s fgo a t et t n h e p r na eu t s o h tt e n w lo rh C l a c lrt e p oea o lb lmoin s main a d te x e me tlrs l h w ta h e ag — t l h o i o i s
基于HEXBS算法的运动估计器的设计
4s @L 16 4 ,5p) P 1(7 ×14 1f 实时编码的要求。 s
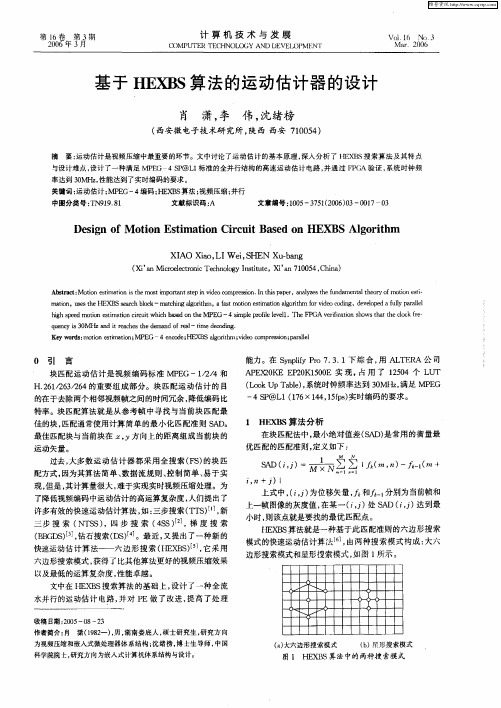
1 H X  ̄算法分析 EI
在块匹配法中, 最小绝对值差(A ) S D 是常用的衡量最 优匹配的匹配准则 , 定义如下:
S AD( , i )
1
最佳匹配块与当前块在 , 方向上的距离组成当前块的
( j= ) 钻石搜索( S e G S【 D , D) 。最近, 又提出了一种新的
小时, 则该点就是要找的最优匹配点 。 HX S E K 算法就是一种基 于此匹配准则的六边形搜索
一
块匹配运动估计是视频 编码标准 MP G一12 4和 E //
H.6 /6/6 212 324的重要组成部分 。块 匹配运动估计的 目 的在于去除两个相邻视频帧之间的时间冗余 , 降低编码 比 特率 。块匹配算法就是从参考帧 中寻找与当前块 匹配最
佳的块, 匹配通常使用计算 简单的最小化匹配准则 S D A 。
率达 到 3MH , 0 z性能 达到 了实 时编码 的要求 。
关键词: 运动估计 ; E 4编码; X S MP G一 HE B 算法; 视频压缩 ; 并行
中 图分类号 :N 1 1 T 9 98 文 献标识码 : A 文章 编号 :0 5 3 5 (0 60 0 1 0 10 — 7120 )3— 0 7 3
基 于 HE B X S算法 的运 动估计器 的设计
肖 潇, 李 伟, 沈绪榜
( 西安 微 电子技术研 究所 , 陕西 西安 7 0 5 ) 1 0 4
摘 要: 运动估计是视频压缩中最重要的环节。文中讨论了运动估 计的基本原理 , 深人分析了 H X S E B 搜索算法及其特点
与设计 难点 , 计 了一种 满足 MP G P 1 准 的全并行 结构 的高速 运 动估 计 电路 , 设 E 4S @L 标 并通 过 F G P A验 证 , 时 钟频 系统
一种改进的快速全局运动估计算法

1 . 36
・
计
算
机
工
程
21 0 0年 1 0月
O c
Co p e m ut rEng ne rng i ei
博 士论 文 ・
一
文章编号:1o 48 00 o l 8 o 文献 码: 0 —32( 1) —I2— 4 0 2 2 I ) 标识 A
hg e i h rGM E r c so . p e ii n
[ yw rs Ke o d ]Glb l t nE t t nGME ; ain set o a Moi smai ( o i o )Grde t cn( De GD) loi m; lc thn g rh B ag rh Bo kMacig oi m(MA)I rt e esS u r( S t Al t ;t ai at qaeI ) e vL L
[ src]T i pp r rsns ni rvdfs Go a MoinE t t nG ) loi m ycmbnn i —t to n a io a Abta t hs ae eet a p mpo e t lb l t smai ( ME ag rh b o iigw t t s pmehdadt dt n l a o i o t h wo e r i
me h d i u e n t e f a u e p x l ih a e s lc e r m h e i u ls mp e l c st th v e n e c u e tir t LS t o s s d o h e t r i e s wh c r e e td fo t e r sd a a l d b o k ha a e b e x l d d ou l s wi I Ex e i n a e h p rme t l r s ls v l t h t t e e t t n s e d o mp o e l o i m e c e 4 /,i i i s f se ha FRGM E a g rt m,a d i g t e u t a i e t a h si i p e f i r v d a g rt da ma o h r a h s 1 2 msf t s 13 t 1 me a t rt n F T l o ih n t e s
四步法运动估计算法
四步法运动估计算法
"四步法"运动估计算法通常指的是在计算机视觉中用于估计物
体运动的一种方法。
这个方法包括四个基本步骤。
请注意,具体的实现可能会有所不同,以下是一个概括:
1.特征提取(Feature Extraction):
从连续的图像帧中提取特征点或特征描述子,这些特征可以唯一地标识场景中的关键点。
常见的特征包括角点、边缘等。
2.特征匹配(Feature Matching):
将第一帧和后续帧中提取的特征进行匹配,以确定它们在不同帧之间的对应关系。
这可以使用各种匹配算法,如最近邻匹配、光流等。
3.运动模型估计(Motion Model Estimation):
根据特征匹配的结果,使用运动模型来估计物体或相机的运动。
运动模型可以是刚体变换、仿射变换等,取决于场景的复杂性。
4.运动参数优化(Motion Parameters Optimization):
通过优化算法(例如最小二乘法)对运动模型的参数进行调整,以最小化特征点在相邻帧之间的误差。
这一步旨在提高运动估计的准确性。
这个四步法的运动估计算法在许多计算机视觉应用中都有应用,包括目标跟踪、光流估计、SLAM(Simultaneous Localization and Mapping)等。
在实际应用中,也可能需要考虑图像噪声、遮挡、光照变化等因素,因此算法的鲁棒性也是一个重要的考虑因素。
需要注意的是,这只是一种常见的运动估计方法之一,还有其他许多复杂的算法和技术,具体选择取决于应用场景和需求。
一种基于UMHexagonS的运动估计优化算法

第 2期 21 0 2年 o 4月
湖南人文科技学 院学报
J u a fHu a n t u e o ma i e ,S in e a d T c n lg o r lo n n I si t fHu n t s ce c n e h oo y n t i
No 2 . Ap .201 r 2
按 照 一定 的 匹配 准 则 ( S D) 索 最 佳 匹配 块 , 如 A 搜 该 匹配块 与 当前 块 之 间 的位 移 为 运 动 矢 量 , 它们
一
U eao S算 法分析 MH xgn
U e ao S算 法 的重 要 特 性 就 是 它 的精 确 MH xgn
的差 值为 残 差 。运 动 估 计 与 补 偿 越 精 确 , 终 得 的起 始点 预 测 以及 提 前 终 止 判 决 ( al T r n . 最 E r emia y 到 的残差 值 越小 , 最终需 要 编码 的 比特 数就 越少 。 法 ( u erh 的搜 索精 度 最高 , 够找 到全 局 最 F lSac ) l 能 t n 。它是 一种混 合 的搜索方 法 , i ) o 主要 步骤 如下 :
H. 6 / V 2 4 A C采 用 基 于 块 匹配 ( lc thn 1 5螺旋 搜索 , 少 搜 索 点数 ; 据 运 动矢 量 的方 向 Bok Ma igA - c 减 根
grh 的运 动估计 算 法 , 参考 帧 的搜 索 窗 口内 性 优化 多层 次六边 形搜 索 。 oi m) t 在
cartographer算法

cartographer算法Cartographer是一种先进的SLAM(Simultaneous Localization and Mapping)算法,用于在未知环境中同时构建地图和定位机器人。
下面是Cartographer算法的详细说明,并给出相应的伪代码。
算法说明:1初始化:创建空地图和初始机器人位姿。
2数据获取:获取激光雷达数据和IMU数据。
3运动估计:使用IMU数据进行运动估计和里程计更新。
4特征提取和匹配:4.1从激光雷达数据中提取特征点。
4.2将新的特征点与先前观察到的地图特征点进行匹配。
4.3利用匹配结果计算机器人的位姿变换。
5闭环检测:5.1通过比较当前帧与先前帧之间的特征匹配,检测是否出现闭环。
5.2如果检测到闭环,执行闭环校正和地图优化。
6位姿图优化:6.1构建位姿图,其中节点为机器人位姿,边表示位姿之间的约束。
6.2使用图优化算法(如g2o)对位姿图进行非线性优化。
7地图更新:7.1使用优化后的位姿更新地图中的特征点位置。
7.2将新的特征点添加到地图中。
8定位:8.1根据地图和激光雷达数据,估计机器人的当前位姿。
伪代码示例:下面是一个简化的伪代码示例,展示了Cartographer算法的主要步骤和函数:# 初始化地图和机器人位姿map= Map()robot_pose = Pose()# 主循环while not end_condition:# 获取传感器数据laser_scan = get_laser_scan()imu_data = get_imu_data()# 运动估计estimate_motion(imu_data)# 特征提取和匹配features = extract_features(laser_scan)match_features(features)# 闭环检测if detect_loop_closure():correct_loop_closure()optimize_map()# 位姿图优化optimize_pose_graph()# 地图更新update_map()# 定位robot_pose = localize(laser_scan, robot_pose)# 更新结束条件update_end_condition()# 输出最终地图map.export()请注意,上述伪代码仅用于演示Cartographer算法的基本流程,并未包含具体函数的实现细节。
一种快速的块匹配运动估计新算法
一种快速的块匹配运动估计新算法
董理濛;张永波;郭德春;杨永坤
【期刊名称】《科学技术与工程》
【年(卷),期】2010(010)034
【摘要】视频编码是一个复杂的过程,包括了空间,时间和统计数据缩减技术的结合.这些技术中运动估计在帧间冗余信息中起着至关重要的作用.因此,寻找最有效的运动估计算法仍然是一项重要的研究课题.在此,为了提高视频编码效率,提出一种新菱形搜索(NDS)的算法. NDS算法适用于开始搜索步骤为十字搜索模式(CSP)并且交叉用大菱形搜索模式(LDSP)和小菱形搜索模式(SDSP),以避免发生局部最优问题.实验结果表明,该NDS算法相对于菱形搜索算法在搜索速度和搜索精度上有显著提高. NDS算法在压缩精度上非常接近于全搜索算法,但是搜索速度是全搜索算法的18.51倍.与DS算法相比,NDS的算法可以实现超过125%倍的速度.
【总页数】5页(P8594-8598)
【作者】董理濛;张永波;郭德春;杨永坤
【作者单位】西北工业大学电子信息学院,西安,710072;西北工业大学电子信息学院,西安,710072;西北工业大学电子信息学院,西安,710072;西北工业大学电子信息学院,西安,710072
【正文语种】中文
【中图分类】TP751
【相关文献】
1.一种新的快速块匹配运动估计搜索算法 [J], 杨军;王群生
2.一种基于块匹配的自适应快速运动估计算法 [J], 舒振宇;高智勇;陈心浩;刘海华
3.快速运动估计中一种改进的块匹配免疫算法 [J], 曾浩;高秀娟;曾孝平
4.一种新的快速块匹配运动估计算法 [J], 王明辉;彭立中
5.一种新的快速两级块匹配运动估计算法 [J], 陈维强;高文
因版权原因,仅展示原文概要,查看原文内容请购买。
一种改进的位平面匹配运动估计算法
() 2
其中 ,Ⅳ表示 块的大小 ;B lk , 表示当前块对应 的位平面 bc / o ( ) 中( J位置的元素值 ,B m+, ) ) , ( fn 表示搜索窗 中( n位置 m, )
元素 异或运算 时,如果结果为 0 ,说 明 2个元素值相 同;如
果结果为 1 ,说明 2个元素不相 同,所 以,N MP的值可用 N 式() 2计算 , 这样 B M 算法比全搜索算法 更容易 以硬件实现 , P 节省硬件资源 ,提高数据处理速度 。
Ⅳ lN -I
N NMP = ∑ ∑ lk 0 ( n+ 0 ( ) c , m+ , )
T reSe erh NT S 、菱形搜索法( i n erh DS he tpS ac , S ) D a dSac , ) mo 等。这 些算法大 大减少 了搜索位置 的数 目,降低了运动估计
位平面 中只有 0和 1 2种元素 ,用异或运算就可 以判 这
断 2个位平面对应位置元素是否相 同。当位平面中对应位置
第3 8卷 第 2期
V0 -8 13
NO2 .
计
算
机
工
程
21 0 2年 1 月
J n r 2 2 a ua y 01
Co pu e g n e i m trEn i e rng
・ 发研 究 与设 计技 术 ・ 开
一
文章编号:10_48 02 29_ 文献标识码: 0 32(1) 2 0 5_ 2 -o A
t r s o d v l e a d t e c n i t to e t ,wh c a e u e t e c mp t t n a d c mp e i ft e mot n e t ai n p o r s n a e a h e h l a u n h a d dae mo i n v cor i h c n r d c h o u a i n o l x t o o y h i si to r g e s a d h v n o m
一种改进的H.264运动估计算法
EEA Oc: 1 0 6 2 D
一
种 改 进 的 H. 6 2 4运 动 估 计 算 法
马 骏 , 丁 晶, 赵 力 , 邹采荣
MAJ n, NOJn ZHAOLiZ u DI ig, , OUC i o g a— n r
( eate o 如E gnei S u esU i s y , aj g20 9, ̄n ) D p , , fR '  ̄ m n i r g, ot at n ̄ri N ni 106C i e n h t n a
ag r h b sdo h h r cei i f t net t ni po o e T ep sil d s r d e y lo i m ae nt ec aatrs c o i si i r p s& h o s emo e e u g db t t s mo o ma o s b a j
Ab ta tI r e O r d c h o u a in o t n e tmain i 2 4 e c d r a tmo ed cso sr c :n o d rt e u et ec mp t t fmo i si to n H. 6 n e ,a fs d e iin o o o
1 H 2 4编解码过程概述 .6
H.6 采用了经典混合 编码算法 的基本结构 , 24 本文第 1 部分简要介绍 了 H.6 2 4的编解码过 其编解码框图如图 1图 2 , 所示。
收稿 日期 :0 50 -3 20 -60 -
作者简介: 骏(91 , 硕士研究生・ 马 18一 男, ) 主要研究数字视频信号处理及其软件实现 , 视频压缩编码等, a n e.d .n m j @s eu c! u u
一种快速的块匹配运动估计新算法
[ ( 1 一 m+ , + ) ( ) f m,) 一( n l 2 k 2
。
们相 继 提 出 许 多 快 速 搜 索 算 法 , 三 步 搜 索 法 如
(S ) T S 四 步 搜 索 法 ( S ) 、二 维 对 数 法 F S
( D )2、 T L [ 菱形法 ( S J , 们 在计 算 复 杂度 上 1 D) 等 它
( )最 小均方 误差 函数 ( E 1 MS )
1 M N
间冗余 , 通过减少 时 间冗 余 可 以大 幅度 地 提高 视频
编码 的效 率 。基 于块 匹 配 的 运 动估 计算 法是 一 种 很 有效 的方法 。块 匹配运 动估计算 法在 M E - P G4和 H 2 3中都得 到 了广泛应 用 … 。 .6
,
分别 为 当 前 帧 和上 一 帧 图像 的灰 度 值 。 因为
因此 , 有必 要寻找更 加有效 的块匹配 运动估计 算法 。 在分析 了诸多 算法 的基础 上 取长 补 短 , 计 出 设 了一 种新 的搜 索算 法—— 新菱 形 搜索 算 法 ( D ) NS。 实验结 果表 明 , D N S算 法在 计算 复 杂度 上 和准 确 度
达到最小 时 , 该点 即为最 优匹配 点 。
在式 ( ) 1 和式 ( ) , i ) 2 中 ( , 为位 移 矢量 , ≤ 一
i. , 为 搜 索 范 围 , xN 为 块 的 大 小 , 和 ,≤ J M
一
比F S减小 了许 多 , 是 搜 索 的准 确 度 比 不 上 F 。 但 S
比较 实 用 , 度 得 到 广 泛 的 应 用 , 采 用 MA 一 现 D
算法 。 ( )对于块 匹配运 动估计搜 索算法 性能 的衡 量 3
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种有效的三步运动估计算法
摘 要:为了减小运动估计算法的计算复杂度及提高序列图像超分辨率重建的可靠性,提出了一种有效的三步搜索算法。
该算法采用多步搜索策略,根据运动矢量分布的中心偏移性及并行处理的思想,在最佳匹配点所在的区域使用菱形小模板代替原有的正方形小模板来进行精细搜索,以提高算法的搜索精度。
实验结果表明,该算法在保证搜索精度的同时能大幅度缩短消耗时间。
关键词:超分辨率重建;运动估计;块匹配;运动矢量
由于误差表面通常并不是单调的,所以搜索窗口太小,就容易陷入局部最优;而搜索窗口太大,又容易产生错误的搜索路径[7]。
3SS 搜索法第一步搜索步长较大,在图像运动较小的时候会影响运动估计的效果,使运动估计的精度明显下降。
在超分辨率图像重建中,序列图像的每一帧变化都很小,帧与帧之间大多为小运动估计,而在实际应用中,除了要保证运动估计的精度之外,对算法的实时性也提出了更高的要求。
根据这个特点,本文提出一种根据N3SS 法演变而来的一种有效的三步搜索算法(effective three step search ,E3SS)。
图2为E3SS 的搜索模板,搜索窗宽度为5,即搜索范围是)5,5(±±j i 。
i
j
6-i 6
+i 6
+j 6
-j
图2 E3SS 搜索模板
在真实的视频序列中,运动矢量的分布具有中心偏移的特点,由全搜索算法FS 的匹配结果表明,匹配点在中心点的概率最高,其次为在中心点周围上、下、左、右的4个邻点,而在中心点周围左上、右上、右下、左下4个对角点的概率最小[8],因此在搜索窗口的中心采用了一个小的菱形搜索模板来替代N3SS 算法
中的正方形小模板。
首先,搜索模板上的13个检测点,如果最小块误差(minimum block distortion ,MBD) 点 (SAD 值最小的点),在搜索窗口的中心则算法结束。
如果MBD 点位于中心点的4个相邻点中,移动菱形小模板到上一步的MBD 点,继续搜索菱形小模板中的其他点,直到MBD 点是菱形中心的点或者菱形小模板到达搜索窗口边缘为止,如图3(a)中,点(0,-1)是第一步的MBD 点,也是第二阶段的MBD 点,且位于搜索窗中心,故最终运动矢量就是(0,-1)。
图中每个点上的数字表明了不同阶段搜索时的检测点。
如果MBD 点是99 模板中的8点之一,搜索方法同3SS ,即将步长减半,中心点移到上一步的MBD 点,重新在周围距离步长的8个点处进行块匹配计算并比较,重复此步骤,直到步长为1,该点所在位置即对应最优运动矢量,如图3(b)中,(4,4)是第一步的MBD 点,然后以(4,4)为中心点进行第二步搜索,此时搜索半径已经缩减为2像素,最后以当前MBD 点(2,6)完成第三步搜索,找到最优匹配点。
-1
1
-2-3-4-5-6-702
3
4567
-11-2-3-4-5-6-7
0234567-11-2-3-4-5-6-7
0234567-11
-2-3-4-5-6-702
3
4
5
6
7
(a) (b)
图3 E3SS 搜索示意图
4 实验结果与分析
为了验证E3SS 算法的性能,在相同条件下进行了一系列的仿真实验。
实验的搜索区域在水平与竖直方向的最大位移均为±7,块的大小为16×16,并采用SAD 作为最佳匹配准则。
实验时,首先利用预测帧的峰值信噪比(peak signal to noise ratio ,PSNR)来度量搜索的准确性,同时选取多个不同性质的序列图像来检
测算法的稳定性,其中Garden为全局运动,Table-tennis为大幅度运动,Susie 为小幅度运动。
最后选取全搜索算法FS、菱形搜索算法DS、预测性菱形搜索算法PDS三种算法进行搜索,以对比E3SS算法的各项性能。
表1 实验数据
从表1可以看出,相对于其他几种算法,E3SS算法在时间上的优势非常大,比目前比较常用的DS算法和PDS算法缩短95%左右,不仅大大提高了搜索的速度,而且降低了计算的复杂度,在对算法实时性要求比较高的场合能发挥更重要的作用。
而通过比较峰值信噪比我们可以看出,E3SS在提高了搜索速度的同时也保证了搜索精度,其精度除了比FS算法略低外,比起其他两种算法都有细微程度的提高。
5 结论
本文提出了一种E3SS算法,该算法根据相邻块之间的运动相关性和运动矢量分布的中心偏移性对目标点的运动进行估计,在最佳匹配点所在的区域使用菱形小模板代替N3SS算法中的正方形小模板来进行精细搜索,以提高算法的搜索精度。
实验表明,与FS、DS、PDS等优秀算法相比新算法不仅保证了运动估计的准确性,而且计算复杂度低、计算速度快,比目前比较常用的DS算法和PDS 算法在时间上约缩短了95%左右。